
Принцип работы кондиционера — доступно об основном
10 сентября 2020
3 комментария
Принцип работы кондиционера
Многие согласятся с тем, что кондиционер существенно повышает комфорт. Но не все знают принцип работы данного устройства. Полезная информация позволит наладить безупречную работу прибора и застраховаться от непредвиденных поломок в работе системы. Прибор из-за своих технологических особенностей нуждается в правильной установке и эксплуатации. Только так можно не волноваться за микроклимат в помещении длительный срок. Поэтому, к вопросу функционирования кондиционера стоит отнестись серьезно.
Суть работы
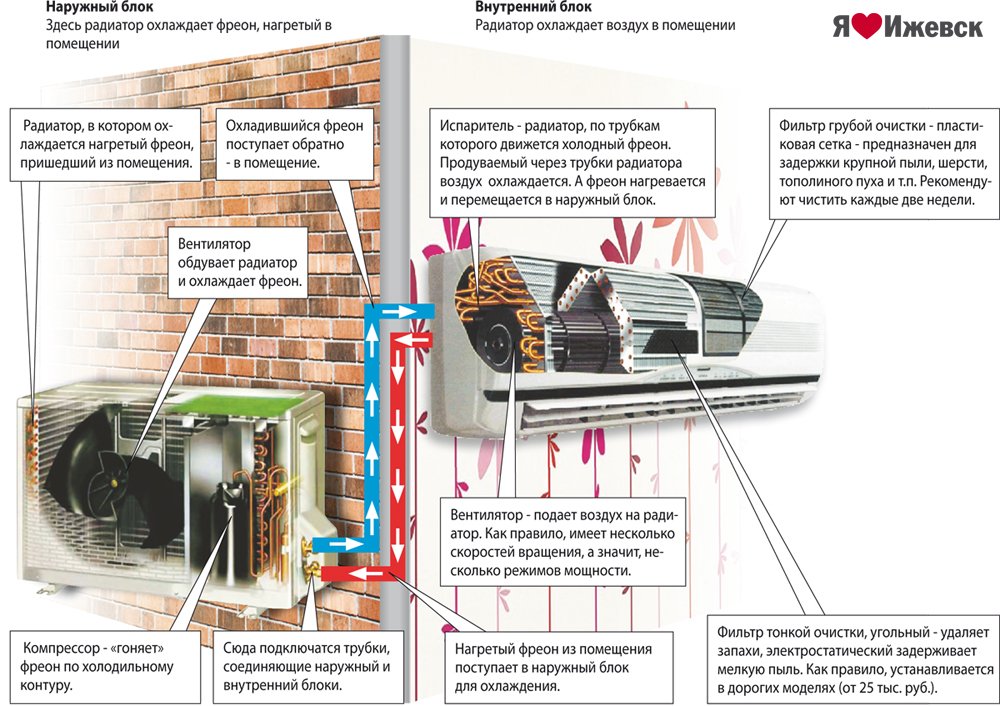
Функционирование климатического оборудования происходит благодаря двум важным составляющим: наружному и внутреннему блоку. Снаружи техника подвержена продуванию воздушными массами на улице, а внутри в помещении – воздушными потоками.
Наружный блок
Эта техническая часть состоит из основных элементов:
- Вентилятор – образует воздушные массы для обдувания конденсатора, что обеспечивает идеальную работу.
- Конденсатор – вещество позволяющее выполнить переход из газа в жидкость. Основная функция – остывание и конденсация хладагента.
- Компрессор – сердце устройства, помогающее сжимать фреона и контролировать его путь.
- Плата управления – мозг устройства. В процессе этого элемента встроен алгоритм, позволяющий управлять работой всего устройства. Элемент отвечает за обработку информации, запуска кондиционера и передачу сигнала.
- Штуцерные элементы – соединительные части, помогающие подключить медные трубы.
- Фильтр – находится у входа в компрессор.
 Является барьером для мелких частичек, пыли, пуховых элементов.
Является барьером для мелких частичек, пыли, пуховых элементов.
Защитная крышка защищает штуцерные элементы и клеммное отделение, к которому подключается электрический кабель, чтобы обеспечить прибор энергией.
Внутренний блок
Внутренняя часть, как и предыдущая включает много элементов:
- Решетчатая панель – выполняет роль начального звена, позволяющие поступать воздуху.
- Фильтр грубой очистки – каркас из пластика с маленьким диаметром отверстий. Служат определенным барьером. Нуждается в регулярной очистке несколько раз за год.
- Фильтрационная система – комплект, состоящий из элементов тонкой очистки. В каждой модели расположен определенный тип фильтра.
- Вентилятор – циркулирует воздушный обмен и выполняет обдув испарителя.
- Испаритель – необходим для нагрева холодного фреона и дальнейшего испарения.
- Горизонтальные жалюзи – позволяют регулировать воздушный поток в вертикальном направлении.
 Дистанционный пульт позволяет осуществлять управление.
Дистанционный пульт позволяет осуществлять управление. - Индикаторная панель – позволяет увидеть актуальный режим работы техники и своевременно обнаружить поломки.
- Вертикальные затворы – электрический блок с платой.
- Плата управления – регулирует горизонтальные воздушные массы.
- Штуцерные элементы – расположены на задней части блока внизу. К ним крепятся соединения из меди для блочных систем.
Современные устройства оснащены фильтрами, накапливающие пыль и другой мусор, попадающийся в воздухе. Регулярная промывка и замена фильтрующих элементов продлит срок службы прибора и будет поддерживать высокие воздушные характеристики.
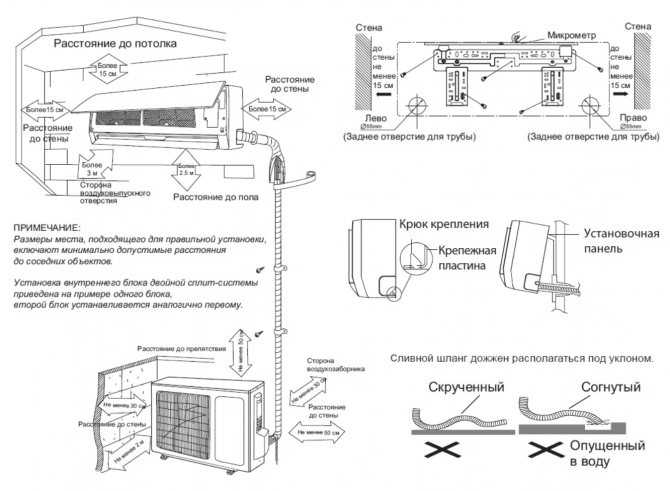
Монтаж и установка
Для ознакомления предлагаем Вам список наших услуг и их стоимость, а для самостоятельного монтажа — рекомендации и последовательность действий. Для прочитавших статью до конца, с удовольствием предоставим купон на скидку, которым Вы сможете воспользоваться при оформлении заказа «reader7».
Поделиться
Рассказать
Поделится
Поделится
Меня заинтересовал принцип работы кондиционера, когда с коллегой начали спорить об его устройстве. Поэтому при помощи гугла стали искать информационную статью, которая бы в доступной форме описывала его действия. Так вышли на данную, которая устроила нашим требованиям и после прочтения все встало на свои места. Спасибо авторам за актуальный материал в доступной форме.
Ответить
То есть если я правильно понял, то все это работает так. Воздух, который в помещении проходит через блок и начинает охлаждаться за счет хладагента?
И еще вопрос есть по поводу эксплуатации. В конце статьи написано, что нужно регулярно промывать и чистить. А насколько регулярно это надо делать? Реально ли сделать это самому? Чем грозит если не чистить? Я так понимаю, тогда там начинают скапливаться бактерии и мы просто начинаем дышать ими в воздухе?
Какова примерная стоимость обслуживания кондиционера? Написано, что фильтры надо чистить несколько раз в год.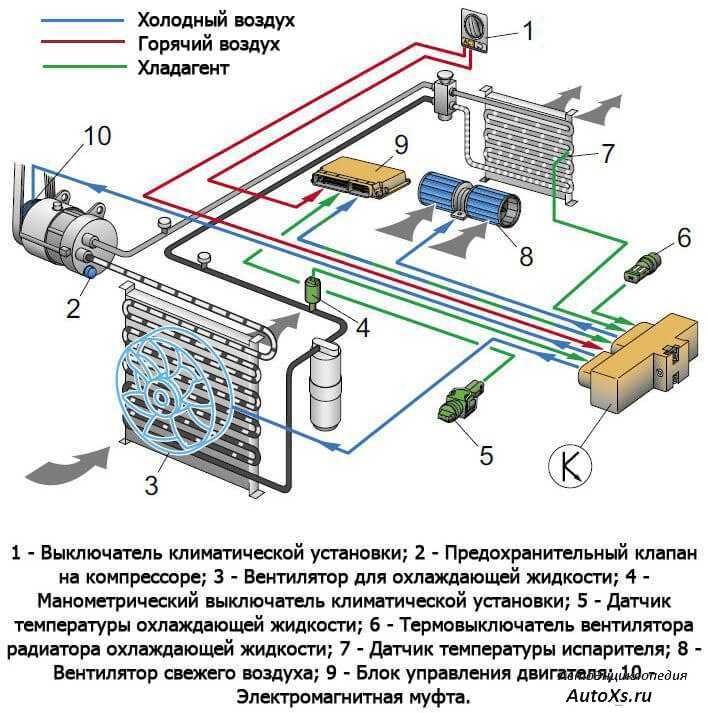 То есть получается что это минимум 2-3 чистки?
То есть получается что это минимум 2-3 чистки?
Новый комментарий
Войти с помощью
Отправить
Как работает кондиционер. Принцип его работы
Кондиционер — это устройство, поддерживающее оптимальные климатические условия в помещении. Он может располагаться в квартире, офисе, автомобиле. Кондиционеры предназначаются для охлаждения и, сейчас все чаще, для нагрева воздуха, а также они очищают помещение от частиц пыли, вредных примесей, вирусов и бактерий. Некоторые модели могут выполнять функцию ионизации воздуха. Кондиционирующие устройства давно стали частью нашей повседневной жизни, однако только немногие пользователи понимают их устройство и принцип работы.
Как устроен кондиционер
Сплит-система вырабатывает тепло или холод за счет протекания термодинамических процессов внутри замкнутого газового контура.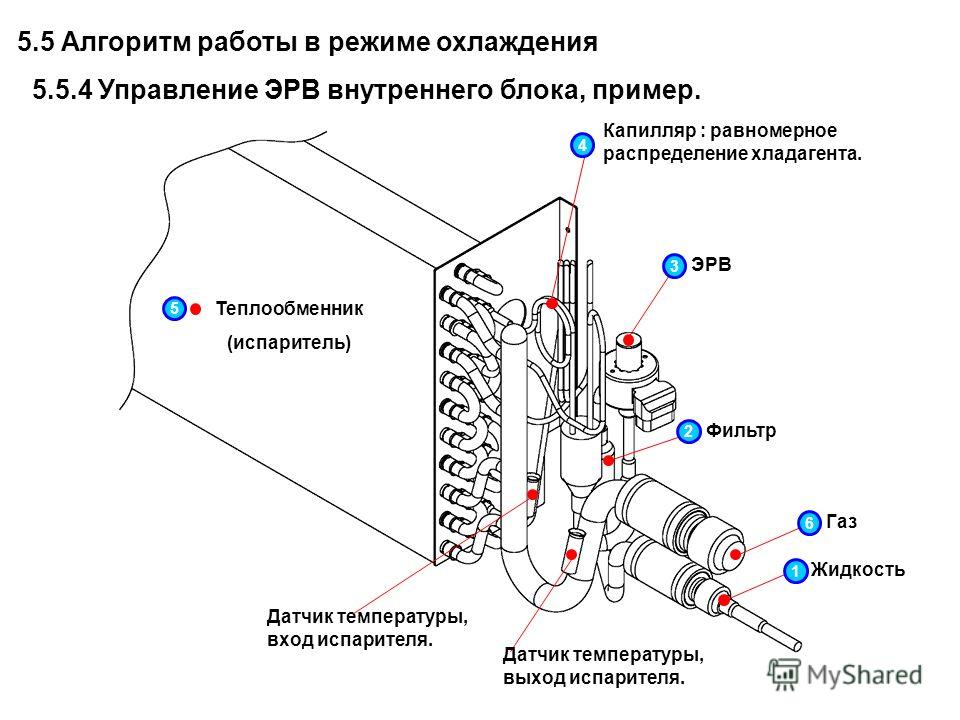 Хладагентом в системе выступает газ фреон. Благодаря своим технологическим свойствам, фреон, при помощи компрессора, системы медных трубок и теплообменников, способен «отбирать» излишнее тепло внутри помещения и передавать его на улицу. Когда кондиционер работает в режиме теплового насоса, фреон наоборот отбирает тепло у наружного воздуха и передает его вовнутрь помещения.
Хладагентом в системе выступает газ фреон. Благодаря своим технологическим свойствам, фреон, при помощи компрессора, системы медных трубок и теплообменников, способен «отбирать» излишнее тепло внутри помещения и передавать его на улицу. Когда кондиционер работает в режиме теплового насоса, фреон наоборот отбирает тепло у наружного воздуха и передает его вовнутрь помещения.
Бытовое кондиционирующее устройство состоит из двух агрегатов — наружного и внутреннего блоков, сообщающихся между собой при помощи межблочных коммуникаций. Принцип работы кондиционера строится на переносе тепла за пределы закрытого помещения. Эту функцию выполняет холодильный контур устройства, состоящий из двух теплообменников — испарителя, расположенного во внутреннем блоке, и конденсатора, находящемся в наружном блоке. Испаритель охлаждает воздух, удаляя тепло из помещения, а конденсатор отдает его во внешнюю среду.
Ключевым для функционирования устройства является фреон — специальный хладагент, который, в зависимости от заданного температурного режима, либо поглощает теплый воздух, либо отдает его. В процессе работы он постоянно меняет свое агрегатное состояние, обеспечивая полноценную работу устройства.
В процессе работы он постоянно меняет свое агрегатное состояние, обеспечивая полноценную работу устройства.
Как работает кондиционер
Независимо от модели все сплит-системы состоят из нескольких главных компонентов, в числе которых:
- компрессор — сжимает хладагент, поддерживая его циркуляцию по холодильному контуру;
- воздушный теплообменник наружного блока — обеспечивает переход вещества из газообразной фазы в жидкую;
- воздушный теплообменник внутреннего блока — обеспечивает испарение фреона и его превращение из жидкости в газ;
- капиллярная трубка — усиливает давление вещества в области высокого давления и понижает в области низкого;
- вентилятор — направляет воздушные потоки, обеспечивая обдувание теплообменников.
Работа кондиционера на обогрев
Современные модели систем кондиционирования предназначены не только для своей традиционной задачи — охлаждения воздуха, но и для обогрева помещения. Работа устройства на обогрев идентична процессу охлаждения.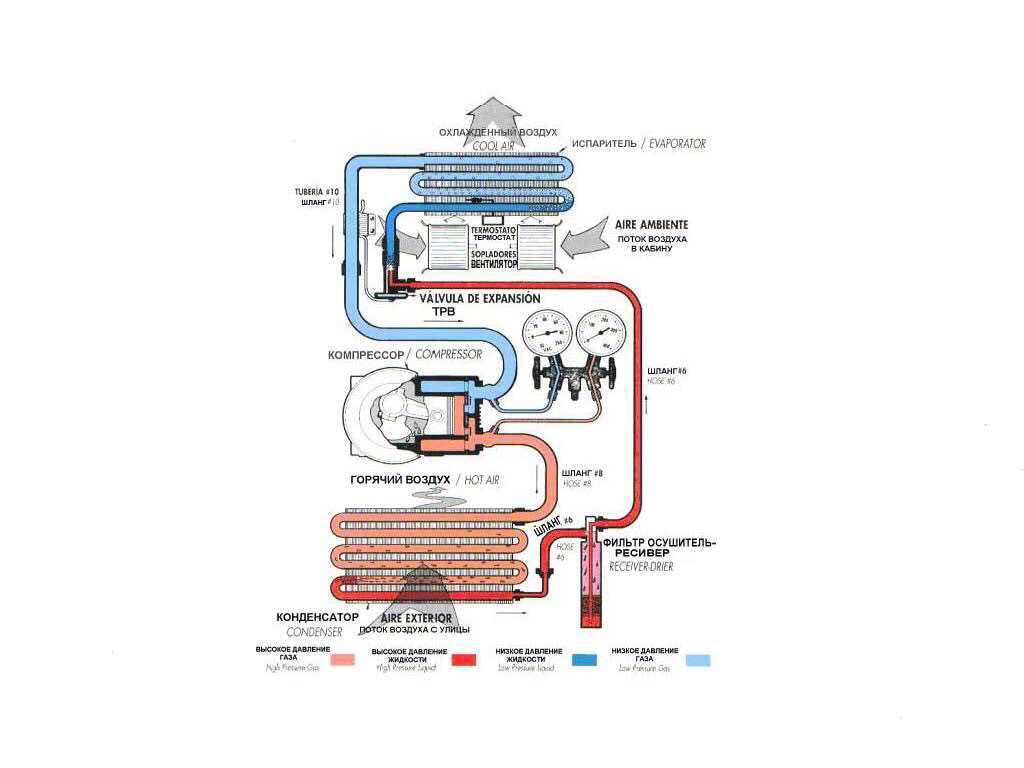
Если при охлаждении воздуха сплит-система перемещает тепло из помещения на улицу, то при обогреве все происходит наоборот: клапан, располагающийся во внешнем блоке прибора, направляет фреон в противоположном направлении. Теплообменники меняются местами, вентиляторы и компрессор переносят тепло внутрь обогреваемой комнаты.
Большинство кондиционирующих устройств рассчитано на работу в режиме обогрева при температуре от -7 до +25°С, хотя некоторые модели (это инверторные кондиционеры и тепловые насосы) допускается эксплуатировать при -15°С и даже при -30°С за окном.
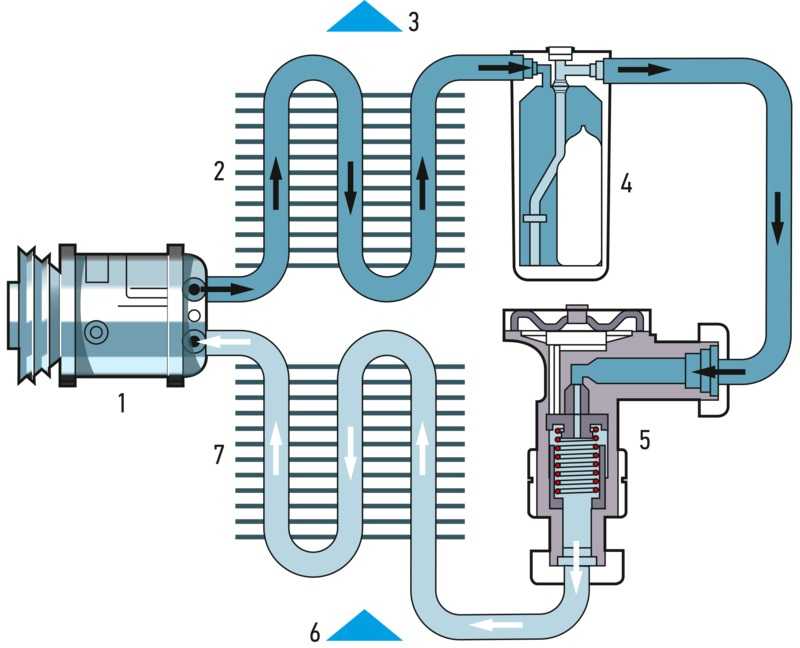
Работа кондиционера на охлаждение
Охлаждать воздух является основной функцией кондиционирующего устройства. Работа кондиционера на охлаждение состоит из следующих фаз:
- Процесс охлаждения воздуха начинается во внешнем блоке устройства, где содержится фреон в состоянии газа.
- Затем вещество транспортируется в компрессор, в котором под давлением сжимается до 20 атмосфер и прогревается до 70-90°С.
- После этого хладагент поступает в воздушный теплообменник наружного блока для охлаждения и превращается в жидкость.
- Фреон подается в терморегулирующий вентиль, где давление понижается и газ начинает нагреваться, доходя до кипения и испаряясь.
- В испарителе жидкий холодный фреон соприкасаясь с теплым воздухом вскипает и в теплообменнике образуется большое количество холода. Воздух, проходит через теплообменник, кондиционируется и подается в помещение с нужной температурой. Далее фреон превращается в горячий газ и поступает на конденсатор, где с помощью вентилятора наружного блока охлаждается, отдавая тепло в окружающее пространство. Благодаря компрессору цикл постоянно повторяется.
Первые признаки поломки в работе кондиционера
Внимательное отношение к кондиционеру поможет вовремя выявить и устранить неполадку, тем самым избежав дорогостоящего ремонта или необходимости покупать новое устройство.
Первые признаки, что системе кондиционирования требуется ремонт:
- Преждевременное выключение.
 Если агрегат быстро отключается, не охлаждая или не нагревая воздух до заданных значений, это может говорить о проблемах с конденсатором или терморегулятором.
Если агрегат быстро отключается, не охлаждая или не нагревая воздух до заданных значений, это может говорить о проблемах с конденсатором или терморегулятором. - Обмерзание. Появление инея во внутреннем блоке свидетельствует о значительной утечке фреона. Причиной этому может быть некачественная развальцовка или неправильная установка самого прибора.
- Вытекание воды. Если из кондиционера капает вода, это говорит о засорении дренажного канала или о обмерзании испарителя. Если прочистить дренажный канал можно самостоятельно, то во втором случае не обойтись без квалифицированной помощи мастера.
- Прибор неправильно реагирует на команды пульта. Эта проблема может свидетельствовать о неполадках с электроникой или электропроводкой, а также указывать на то, что из строя вышел пульт управления.
- Кондиционер не доводит температуру до нужных значений. Если устройство длительно работает, но не может справиться с задачей нагрева/охлаждения, причина, скорее всего, заключается в неисправности компрессора или электроники.
- Неприятный запах. Если устройство выделяет запах сырости или горелой проводки, не следует надолго откладывать вызов мастера. Проблемы с проводкой могут привести к замыканию, поэтому кондиционер следует немедленно выключить. При поражении внутреннего блока плесенью понадобится обработка специальными антисептическими средствами, уничтожающими плесневые бактерии.
Важно помнить, что основными причинами большинства поломок является утечка фреона и загрязненность устройства, поэтому любой кондиционер независимо от модели нуждается в регулярном сервисном обслуживании.
Вывод
Кондиционер — важное устройство, которое позволяет поддерживать оптимальный микроклимат и создавать комфортные условия в помещении. Каждому владельцу этого технологически сложного устройства необходимо знать, как устроен принцип его работы. Это поможет использовать прибор более рационально, избежать поломок и эксплуатировать максимально длительно.
Во время эксплуатации кондиционера необходимо придерживаться правил, указанных производителем, а при первых признаках поломки — вызвать мастера.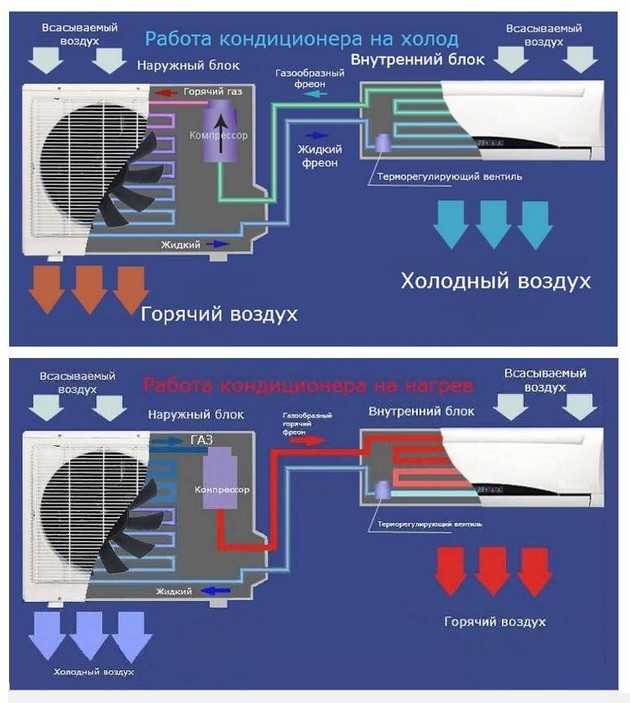 Специалист проведет диагностику оборудования, укажет на причины неисправности и выполнит качественный ремонт.
Специалист проведет диагностику оборудования, укажет на причины неисправности и выполнит качественный ремонт.
Алгоритм управления температурой подземного кондиционирования воздуха на станции
На этой странице в пропорционально-интегрально-дифференциальной нейронной сети алгоритм летучей мыши используется для выбора начальных весов, модель предсказания нейронной сети радиальной базисной функции используется для оптимизации конструкции предиктора, а разработанная система управления моделируется на платформе моделирования MATLAB. . Результаты моделирования показывают, что динамические характеристики и установившиеся характеристики ПИД-регулятора, оптимизированного по алгоритму bat, лучше, чем у ПИД-регулятора, настроенного традиционными методами. После оптимизации с помощью модели прогнозирования нейронной сети с радиальной базисной функцией быстродействие и стабильность контроллера значительно улучшаются.
1. Введение
В настоящее время в большинстве систем управления кондиционированием воздуха на подземных станциях наиболее распространенной стратегией управления является прямое управление без обратной связи или управление с обратной связью с ПИД-регулятором. Когда модель процесса управляемого объекта может быть получена путем вывода механизма или легко идентифицирована, параметры регулятора могут быть получены путем прямого присвоения полюса-нуля или анализа в частотной области, и традиционный алгоритм управления эффективен. Однако система управления кондиционированием воздуха представляет собой сложную нелинейную систему, и параметры ПИД-регулятора, полученные путем эмпирической настройки, часто подходят только для определенной рабочей среды. При дрейфе параметров объекта параметры ПИД-регулятора соответственно не изменятся, что приведет к ухудшению качества управления. Трудности в управлении системой кондиционирования заключаются в следующем: (1) трудно точно определить математическую модель системы кондиционирования воздуха при различных условиях работы; (2) трудно предсказать случайное вмешательство потока людей и внешней среды в контролируемую внутреннюю среду; 3) большая контролируемая область, большие инерционные характеристики и чисто запаздывающие звенья, которые трудно устранить в управлении [1, 2].
Когда модель процесса управляемого объекта может быть получена путем вывода механизма или легко идентифицирована, параметры регулятора могут быть получены путем прямого присвоения полюса-нуля или анализа в частотной области, и традиционный алгоритм управления эффективен. Однако система управления кондиционированием воздуха представляет собой сложную нелинейную систему, и параметры ПИД-регулятора, полученные путем эмпирической настройки, часто подходят только для определенной рабочей среды. При дрейфе параметров объекта параметры ПИД-регулятора соответственно не изменятся, что приведет к ухудшению качества управления. Трудности в управлении системой кондиционирования заключаются в следующем: (1) трудно точно определить математическую модель системы кондиционирования воздуха при различных условиях работы; (2) трудно предсказать случайное вмешательство потока людей и внешней среды в контролируемую внутреннюю среду; 3) большая контролируемая область, большие инерционные характеристики и чисто запаздывающие звенья, которые трудно устранить в управлении [1, 2].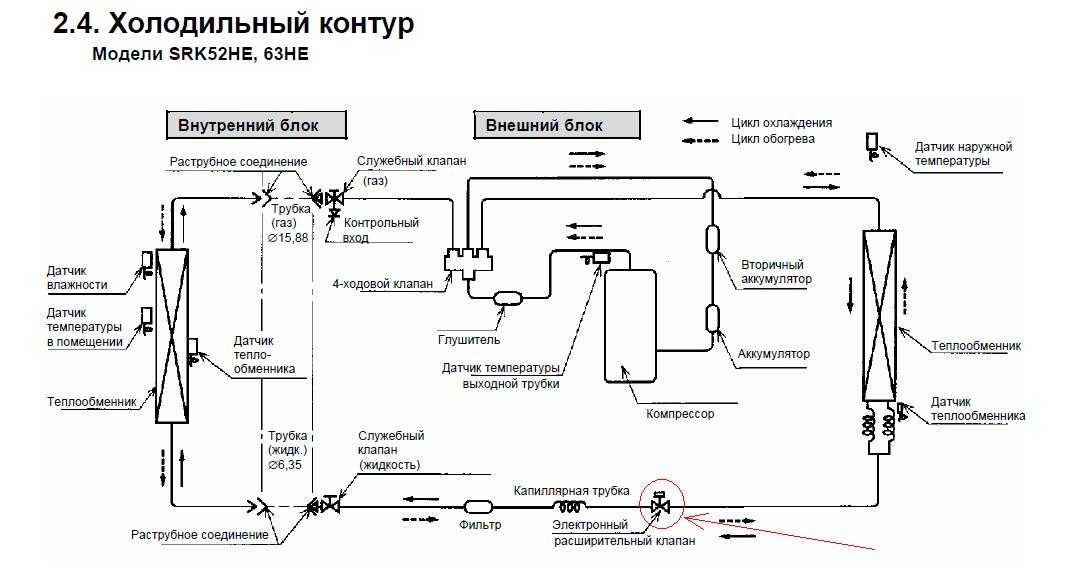
За прошедшие годы многие исследователи провели большую исследовательскую работу в направлении анализа стабильности, настройки параметров и самоадаптации параметров ПИД-регулятора, но лишь немногие результаты исследований действительно были распространены на инженерные проекты. В соответствии с этапами разработки, настройку параметров ПИД можно разделить на классический метод настройки, представленный анализом в частотной области, эмпирический метод настройки, представленный Циглером-Николсом, и метод интеллектуальной настройки, который в настоящее время популярен в исследованиях. В соответствии с формой заявки его можно разделить на методы онлайн-настройки и офлайн-настройки. Автономный метод настройки часто заключается в настройке параметров до того, как ПИД-регулятор будет запущен в работу. Когда контроллер имеет дело с различными режимами работы, необходимо записать несколько групп комбинаций параметров в контроллер и переключаться в соответствии с различными внешними состояниями, поэтому его рабочий режим ограничен, и необходимо учитывать проблему бесперебойного переключения в разных режимах.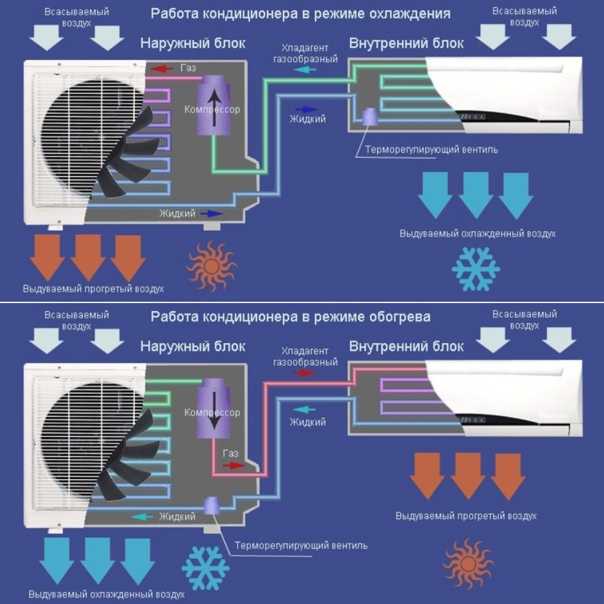 . Метод онлайн-настройки заключается в том, чтобы ввести функцию оценки индекса производительности в ПИД-регулятор во время работы, рассчитать величину коррекции в соответствии с функцией индекса производительности в каждом цикле управления или каждом конкретном цикле управления и отрегулировать параметры ПИД-регулятора в режиме реального времени. чтобы можно было добиться лучшего эффекта контроля. С развитием науки и техники технологии машинного обучения, включая модель нейронной сети, стали широко использоваться во многих областях, таких как оптимизация пассажиропотока метро [3, 4], прогнозирование спроса на такси [5], планирование велосипедных станций [6], и распознавание стандартной плоскости УЗИ плода [7]. Основной вклад этой статьи заключается в разработке адаптивного ПИД-регулятора с превосходными характеристиками путем объединения характеристик системы кондиционирования воздуха подземной станции и алгоритмов, связанных с нейронной сетью. По сравнению с обычным ПИД-регулятором разработанный контроллер может значительно улучшить динамические качества управляемого объекта, адаптироваться к изменяющимся во времени характеристикам процесса, обеспечить работу системы контроля температуры в наилучшем состоянии, сделать систему кондиционирования воздуха более точное управление и достижение эффекта энергосбережения.
. Метод онлайн-настройки заключается в том, чтобы ввести функцию оценки индекса производительности в ПИД-регулятор во время работы, рассчитать величину коррекции в соответствии с функцией индекса производительности в каждом цикле управления или каждом конкретном цикле управления и отрегулировать параметры ПИД-регулятора в режиме реального времени. чтобы можно было добиться лучшего эффекта контроля. С развитием науки и техники технологии машинного обучения, включая модель нейронной сети, стали широко использоваться во многих областях, таких как оптимизация пассажиропотока метро [3, 4], прогнозирование спроса на такси [5], планирование велосипедных станций [6], и распознавание стандартной плоскости УЗИ плода [7]. Основной вклад этой статьи заключается в разработке адаптивного ПИД-регулятора с превосходными характеристиками путем объединения характеристик системы кондиционирования воздуха подземной станции и алгоритмов, связанных с нейронной сетью. По сравнению с обычным ПИД-регулятором разработанный контроллер может значительно улучшить динамические качества управляемого объекта, адаптироваться к изменяющимся во времени характеристикам процесса, обеспечить работу системы контроля температуры в наилучшем состоянии, сделать систему кондиционирования воздуха более точное управление и достижение эффекта энергосбережения. В то же время система проста в инженерной реализации, отладке и вводе в эксплуатацию, имеет значение инженерной популяризации.
В то же время система проста в инженерной реализации, отладке и вводе в эксплуатацию, имеет значение инженерной популяризации.
2. Проект регулятора температуры для подземного кондиционирования воздуха на станции
2.1. Структура системы холодильной станции кондиционирования воздуха
Объектом исследования в данной статье является система кондиционирования холодильной станции станции метро. Как показано на рисунке 1, система кондиционирования воздуха на подземной станции состоит из градирни, насоса охлаждающей воды, холодильных установок, терминала кондиционирования воздуха и т. д., которые в основном используются для охлаждения воздуха на станции. Источник воды градирни направляет охлажденный воздух в общественные места через насос охлаждающей воды и холодильную установку для регулирования температуры на станции.
2.2. Структура нейронного контроллера
Нейронная сеть обладает характеристиками крупномасштабной параллельной обработки, высокой отказоустойчивостью и надежностью, самоорганизующимся обучением и обработкой в реальном времени и может создавать эффективные интеллектуальные контроллеры для нелинейных и изменяющихся во времени систем.
Контроллер с одним нейроном унаследовал преимущества обычного ПИД-регулятора, такие как простота, практичность и простота реализации посредством программирования в системе управления ПЛК. Он имеет меньше регулируемых параметров, простоту отладки и лучшее качество управления, чем обычный ПИД-регулятор [8]. Классический нейронный алгоритм интеллектуального контроллера показан на рис. 2: 9.0003
Целевая функция
Характеристики нейрона следующие: где = 1, 2, 3;取0 < < 1 представляет разность первого порядка, представляет системную ошибку и представляет собой накопление ошибки.
2.3. Алгоритм Bat, используемый для выбора начальных весов
2.3.1. Механизм оптимизации алгоритма летучих мышей
Алгоритм летучих мышей — это своего рода алгоритм оптимизации роевого интеллекта, предложенный Синь-Ше Янгом в 2010 году. В природе плетеные летучие мыши излучают ультразвуковые импульсы, а информация о добыче определяется путем анализа ультразвуковых волн, объекты. Летучие мыши случайным образом меняют скорость, положение и частоту ультразвуковых волн для поиска пищи таким образом. В процессе непрерывного приближения к добыче плетёная летучая мышь будет ослаблять громкость и увеличивать частоту ультразвуковых импульсов, тем самым подтверждая, что расстояние между плетёной летучей мышью и добычей уменьшается [9].].
Летучие мыши случайным образом меняют скорость, положение и частоту ультразвуковых волн для поиска пищи таким образом. В процессе непрерывного приближения к добыче плетёная летучая мышь будет ослаблять громкость и увеличивать частоту ультразвуковых импульсов, тем самым подтверждая, что расстояние между плетёной летучей мышью и добычей уменьшается [9].].
Большое количество исследований показало, что по сравнению с оптимизацией роя частиц, генетическим алгоритмом и другими алгоритмами оптимизации алгоритм летучей мыши имеет меньше итерационных шагов и более высокую точность оптимизации. Следовательно, в идеальных условиях применение алгоритма bat для автономной оптимизации PID часто позволяет получить набор лучших начальных значений параметров PID. В этой статье алгоритм летучей мыши используется для определения начальных весов одного нейрона, то есть процесса выбора начальных параметров PID, скорости обучения, увеличения и других параметров.
Механизм оптимизации алгоритма bat показан на рисунке 3. В качестве целевой функции выбрана функция ITAE управляемой переменной; в соответствии с моделью объекта, полученной с помощью алгоритма идентификации, набор параметров ПИД, минимизирующих индекс ITAE, получают путем итеративной оптимизации алгоритма, а затем применяют к ПИД-регулированию. [9].
В качестве целевой функции выбрана функция ITAE управляемой переменной; в соответствии с моделью объекта, полученной с помощью алгоритма идентификации, набор параметров ПИД, минимизирующих индекс ITAE, получают путем итеративной оптимизации алгоритма, а затем применяют к ПИД-регулированию. [9].
2.3.2. Алгоритм летучих мышей оптимизирует процесс вычисления PID
. Процесс настройки параметров PID на основе алгоритма летучих мышей показан на рис. 4. Следуя процессу кормления летучих мышей, частота, скорость и положение летучих мышей обновляются следующим образом: где ∈[ 0, 1] — случайное число; , – диапазон частот ф . По конкретному приложению определяется, что является глобальным оптимальным решением в момент времени t [10].
Для локальной оптимизации, как только будет определено текущее глобальное оптимальное решение, каждая летучая мышь будет совершать случайное движение в соответствии со следующей формулой, тем самым генерируя новый набор решений [11]. где ∈[−1, 1] — случайное число; средняя громкость всех летучих мышей в момент времени t .
где ∈[−1, 1] — случайное число; средняя громкость всех летучих мышей в момент времени t .
2.4. Модель прогнозирования нейронной сети
Вообще говоря, объект управления и процесс управления в промышленности могут быть описаны моделью временной задержки первого или второго порядка, а управление с обратной связью может быть реализовано с использованием метода объединения MFAP с PID. Параметры авторегрессионной модели на основе временных рядов оцениваются по алгоритму Левинсона в предикторе MFAP. MFAP без предсказателя модели может сформировать локальную модель предсказания на основе исторических данных длиной м . После предоставления одного из самых продвинутых прогнозируемых значений прогнозируемое значение используется для замены значения процесса в будущем времени выборки. Путем связывания итерационных процессов оптимальное значение расширенного прогноза P-шага получается и присваивается значению процесса PID. Нейронная сеть обладает сильной способностью к нелинейному отображению, и нейронная сеть широко изучалась и применялась для идентификации моделей.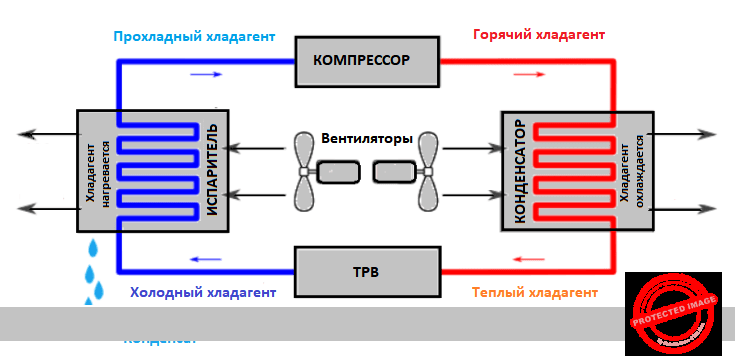 Соответствующая литература показывает, что по сравнению с авторегрессионной (AR) моделью нейронная сеть имеет лучшую точность в прогнозировании регрессии. В этой статье нейронная сеть с радиальной базисной функцией (RBF) выбрана для идентификации контролируемого процесса, а значение процесса объекта присваивается концу обратной связи значения процесса ПИД-регулятора, что заставит контроллер действовать заранее, а выходное значение изменяться заранее, чтобы объект мог быстрее и стабильнее отслеживать установленное значение, а также повышать стабильность и надежность системы [12].
Соответствующая литература показывает, что по сравнению с авторегрессионной (AR) моделью нейронная сеть имеет лучшую точность в прогнозировании регрессии. В этой статье нейронная сеть с радиальной базисной функцией (RBF) выбрана для идентификации контролируемого процесса, а значение процесса объекта присваивается концу обратной связи значения процесса ПИД-регулятора, что заставит контроллер действовать заранее, а выходное значение изменяться заранее, чтобы объект мог быстрее и стабильнее отслеживать установленное значение, а также повышать стабильность и надежность системы [12].
Нейронная сеть обладает сильной способностью к нелинейному отображению, и нейронная сеть широко изучалась и применялась для идентификации моделей. Соответствующая литература показывает, что по сравнению с авторегрессионной моделью (AR) нейронная сеть имеет лучшую точность в прогнозировании регрессии. Суть идентификации системы на основе нейронной сети заключается в выборе подходящей модели нейронной сети для приближения к фактической управляемой системе и для приближения к динамической системе посредством непрерывного обучения выборке.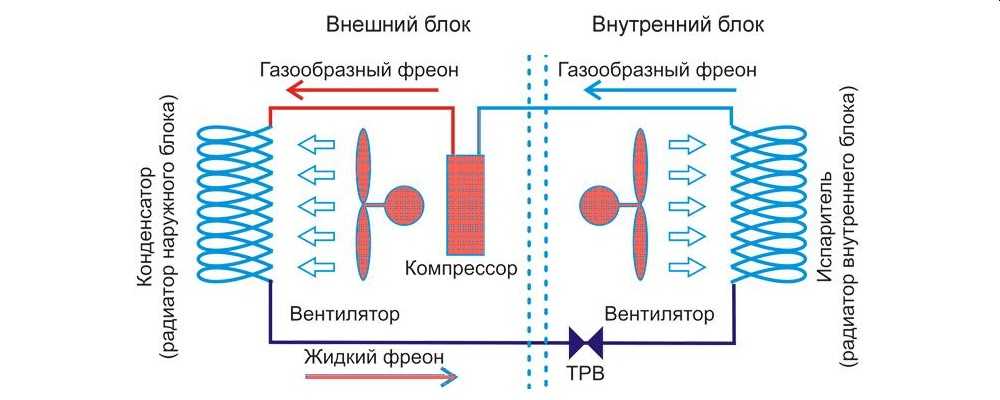 При разработке идентификатора основными факторами, влияющими на точность его идентификации и способность к обобщению, являются следующие: (1) Структурная сложность и сложность выборки. Размер эквивалентной модели нейронной сети должен быть больше или равен размеру выборки. (2) Качество выборки. Точность и масштаб выборочных данных особенно важны для точности сети идентификации, а обработка набора данных для предварительной подготовки и разработка алгоритма фильтрации являются важным содержанием, на которое следует обратить внимание. (3) Априорные знания. Используя предварительные знания, диапазон параметров, таких как порядок и временная задержка модели, ограничен, чтобы повысить точность модели и уменьшить рабочую нагрузку в процессе предварительной подготовки. (4) Начальный вес. Нейронная сеть чувствительна к установке начальных весов. На начальном этапе использует для обучения меньшие случайные веса, а после многих тренировок получает идеальные веса.(5)Время обучения. За счет оптимизации процесса вычислений нейронной сети время обучения нейронной сети ограничено для удовлетворения требований реального времени в системе управления.
При разработке идентификатора основными факторами, влияющими на точность его идентификации и способность к обобщению, являются следующие: (1) Структурная сложность и сложность выборки. Размер эквивалентной модели нейронной сети должен быть больше или равен размеру выборки. (2) Качество выборки. Точность и масштаб выборочных данных особенно важны для точности сети идентификации, а обработка набора данных для предварительной подготовки и разработка алгоритма фильтрации являются важным содержанием, на которое следует обратить внимание. (3) Априорные знания. Используя предварительные знания, диапазон параметров, таких как порядок и временная задержка модели, ограничен, чтобы повысить точность модели и уменьшить рабочую нагрузку в процессе предварительной подготовки. (4) Начальный вес. Нейронная сеть чувствительна к установке начальных весов. На начальном этапе использует для обучения меньшие случайные веса, а после многих тренировок получает идеальные веса.(5)Время обучения. За счет оптимизации процесса вычислений нейронной сети время обучения нейронной сети ограничено для удовлетворения требований реального времени в системе управления.
2.4.1. Разработка предиктора на основе нейронной сети RBF
В этой статье RBF выбирается для идентификации контролируемого процесса, а значение процесса объекта назначается на конец обратной связи значения процесса ПИД-регулятора, что заставит контроллер действовать заранее и выходное значение изменяется заранее, чтобы объект мог отслеживать установленное значение более быстро и стабильно, а также повышать стабильность и надежность системы.
В применении нейронной сети для идентификации системы, многослойная нейронная сеть с прямой связью (MFN) и нейронная сеть с радиальной базисной функцией (RBF) являются двумя распространенными типами. По сравнению с MFN, RBF имеет более высокую скорость сходимости и точность аппроксимации из-за более простой сетевой структуры и более эффективного алгоритма обучения. Мы выбираем последовательно-параллельную структуру идентификации [13], и установленная модель идентификации RBF с несколькими входами и одним выходом показана на рисунке 5.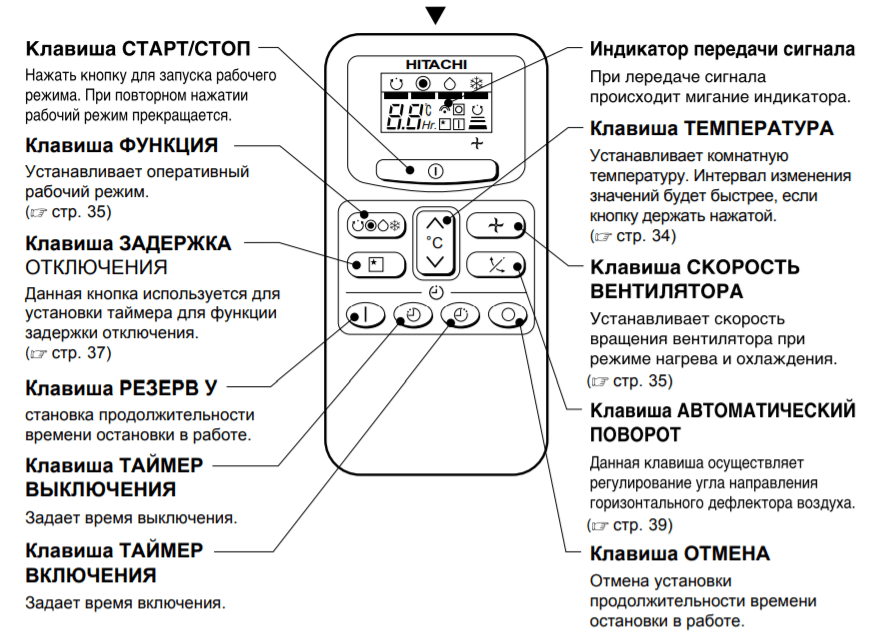
Нейронная сеть RBF имеет трехслойную сетевую структуру, которая состоит из входного слоя, скрытого слоя и выходного слоя [14]. Вход u ( k ) и выход y ( k ) идентифицированной системы используются как вход модели идентификации. Входной слой сети:
Прогнозируемый выход выражается как
Мы принимаем показатели эффективности:
Корректировка веса: где = 1, 2, 3; 0 < < 1 — информация о якобиане управляемого процесса, полученная по выходным данным онлайн-идентификации RBF, т. е.
Взвешенное отношение нелинейного преобразования используется для модификации Ku онлайн;
2.4.2. Сравнение эффектов прогнозирования между нейронной сетью RBF и моделью AR
В настоящее время многие литературные исследования показывают, что точность нейронной сети намного выше, чем у регрессионной модели при идентификации и прогнозировании нелинейных систем [15]. На рисунке ниже показан результат сравнения точности регрессионной модели модели AR, полученный с использованием нейронной сети RBF и модели AR при идентификации модели процесса.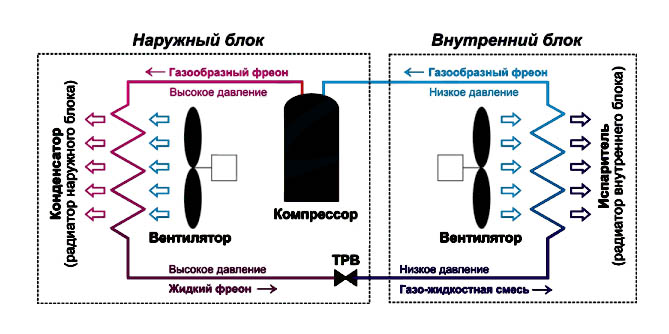
Как показано на рис. 6, синий цвет — это результат прогноза модели AR, а красный — результат прогноза модели RBF. По результатам сравнения видно, что погрешность результата на основе идентификации РБФ значительно меньше, чем у рекурсивной модели АР, что доказывает целесообразность использования РБФ в качестве идентификации данного процесса. Алгоритм идентификации RBF, разработанный на рисунке, регулирует вес на основе текущей ошибки, которую можно использовать для идентификации локальной модели или глобальной идентификации. Когда масштаб сети одинаков, локальная модель имеет лучшую точность, но плохая способность к обобщению, глобальная модель имеет более сильную способность к обобщению, а точность прогнозирования немного снижается. Потерю точности можно компенсировать за счет увеличения размера обучающей выборки и количества скрытых слоев [16].
3. Моделирование
Для предварительной проверки эффективности и превосходства предлагаемого алгоритма управления алгоритм моделируется с помощью программного обеспечения MATLAB. Типичная линия с временной задержкой второго порядка выбрана в качестве управляемой модели, сигнал шага используется в качестве возбуждения замкнутого контура управления, а сигнал белого шума и сигнал шага используются для проверки помех соответственно. Результаты экспериментов и выводы следующие:
Типичная линия с временной задержкой второго порядка выбрана в качестве управляемой модели, сигнал шага используется в качестве возбуждения замкнутого контура управления, а сигнал белого шума и сигнал шага используются для проверки помех соответственно. Результаты экспериментов и выводы следующие:
3.1. Настройка алгоритма летучей мыши + Традиционный метод PID
В соответствии с алгоритмом летучей мыши число итераций равно 50, начальная популяция равна 20, пространство оптимизации равно: ; Входной сигнал представляет собой ступенчатый сигнал с амплитудой 1. Чтобы получить хорошие динамические характеристики и безупречное отслеживание сигнала, в качестве целевой функции принимается интегральный критерий минимальной абсолютной ошибки, а квадратный член управляющей величины добавляется к целевая функция для предотвращения слишком большой энергии управления: где e ( k ) — текущая ошибка времени; U ( k ) — выход контроллера; – веса, = 0,001, когда , = 10; В противном случае = 0. То есть выброс используется в качестве индекса штрафа для процесса оптимизации, чтобы предотвратить слишком большой выброс системы. Количество итераций равно 50, а результаты настройки ПИД-регулятора равны . Процесс настройки показан на рисунках 7 и 8.
То есть выброс используется в качестве индекса штрафа для процесса оптимизации, чтобы предотвратить слишком большой выброс системы. Количество итераций равно 50, а результаты настройки ПИД-регулятора равны . Процесс настройки показан на рисунках 7 и 8.
Шаговая интерференция 10 % добавлена в 8-м моделировании, и результат показан на рисунке 9.. Можно видеть, что производительность регулятора, оптимизированного с помощью алгоритма bat для параметров ПИД, намного лучше, чем у регулятора, настроенного обычным методом, с более коротким временем нарастания и меньшим перерегулированием, и его можно стабилизировать за более короткое время после возмущения, и его динамические и установившиеся характеристики лучше, чем у ПИД-регулятора, настроенного традиционным способом.
3.2. Настройка алгоритма летучей мыши + Пропорционально-интегрально-дифференциальная нейронная сеть + Модель прогнозирования Модель временной задержки второго порядка
Как показано на рисунке 10, начальные веса PID одного нейрона используют параметры PID, оптимизированные с помощью алгоритма bat, в качестве начальных значений w1, 2 и 3, увеличение Ku установлено равным 1, а скорость обучения Kp , Kd и Ki равны 0,3, 0,35 и 0,33 соответственно. Используйте ступенчатый сигнал для возбуждения и примените ступенчатую интерференцию 10% при 80 с. Запись кривой отклика показана на рисунке 11.
Используйте ступенчатый сигнал для возбуждения и примените ступенчатую интерференцию 10% при 80 с. Запись кривой отклика показана на рисунке 11.
Эффект управления системы управления, оптимизированный с использованием пропорционально-интегрально-дифференциальной нейронной сети (PIDNN ) , а модель прогнозирования RBF лучше, чем скорректированная обычными методами. Ступенчатая кривая растет быстрее, и нет перерегулирования. В ходе испытания на ступенчатые помехи видно, что оптимизированный ПИД-регулятор обладает лучшей защитой от помех, и контролируемая величина все еще может быть быстро восстановлена до стабильного состояния. По сравнению с традиционными методами, используемый нейросетевой адаптивный прогностический контроллер имеет выдающиеся преимущества меньшего количества параметров настройки, легкой сходимости, короткого переходного процесса, сложных колебаний и дивергенций, а также простой реализации инженерной конфигурации.
4. Выводы
В данной работе контроллер температуры кондиционирования воздуха станции метро разработан на основе PIDNN, алгоритм bat используется для выбора начальных весов, модель прогнозирования нейронной сети RBF используется для оптимизации проектирования предиктор, и моделируется проектируемая система управления. Производительность регулятора, оптимизированного алгоритмом bat для ПИД-параметров, намного лучше, чем у обычного метода, а его динамические характеристики и характеристики в установившемся режиме лучше, чем у обычного метода. Метод управления, предложенный в этой статье, сочетает в себе контроллер нейронной сети RBF с PICNN, в полной мере используя сильные адаптивные характеристики обучения нейронной сети. После оптимизации прогностической модели PIDNN и RBF схема управления решает проблемы большого перерегулирования и длительного времени отклика в системе контроля температуры кондиционирования воздуха, устраняет статические ошибки, повышает скорость и стабильность и обеспечивает значительный эффект применения.
Производительность регулятора, оптимизированного алгоритмом bat для ПИД-параметров, намного лучше, чем у обычного метода, а его динамические характеристики и характеристики в установившемся режиме лучше, чем у обычного метода. Метод управления, предложенный в этой статье, сочетает в себе контроллер нейронной сети RBF с PICNN, в полной мере используя сильные адаптивные характеристики обучения нейронной сети. После оптимизации прогностической модели PIDNN и RBF схема управления решает проблемы большого перерегулирования и длительного времени отклика в системе контроля температуры кондиционирования воздуха, устраняет статические ошибки, повышает скорость и стабильность и обеспечивает значительный эффект применения.
Доступность данных
Набор данных, использованный в этой статье, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Вклад авторов
Все авторы ознакомились с рукописью и одобрили ее отправку в ваш журнал.
Благодарности
Эта работа частично спонсировалась Департаментом промышленности и информационных технологий провинции Шаньдун. Проект 202060102367 Название: Исследование ключевых технологий умной городской железнодорожной системы эксплуатации и обслуживания на основе Интернета вещей; Шаньдунский фонд естественных наук №: ZR2020QE268. Название: Базовое применение технологии ABP-IoT в вентиляторах тоннелей метро Исследование энергосберегающих технологий системы экологического контроля, № проекта: 2019-К7-5.
Ссылки
Ю. Дэн, «Исследование общих проблем проектирования и строительства систем вентиляции и кондиционирования воздуха в метро», China New Communications , vol. 19, нет. 3, стр. 102-103, 2017.
Посмотреть по адресу:
Google Scholar
Л. Хе, «Энергосберегающие конструкции вентиляции и кондиционирования воздуха в метро», China Construction , vol.
 7, нет. 3, стр. 98–99, 2014.
7, нет. 3, стр. 98–99, 2014.Посмотреть по адресу:
Google Scholar
J. Zhou, H. Wang, D. Sun, S. Xu, M. Lv и F. Yu, «Схема оптимизации большого пассажиропотока на станции huoying, линия 13 пекинского метрополитена», Computers , Материалы и сплошная среда , том. 63, нет. 3, стр. 1387–1398, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
В. Ли, М. Чжоу и Х. Донг, «Классификация станций городского железнодорожного транспорта на основе двухэтапного кластера», Intelligent Automation & Soft Computing , том. 26, нет. 3, стр. 531–538, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Д. Цао, К. Цзэн, Дж. Ван и П. Шарма, «Глубокая пространственно-временная сеть на основе BERT для прогнозирования спроса на такси», IEEE Transactions on Intelligent Transportation Systems , vol.
 11, нет. 2, стр. 1–13, 2021.
11, нет. 2, стр. 1–13, 2021.Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. Чен, К. Ли, К. Ли, П. С. Ю и З. Цзэн, «Динамическое планирование велосипедных станций в бездоковой общественной системе проката велосипедов с использованием нейронной сети с закрытым графом», ACM Transactions on Intelligent Systems and Technology , vol. 12, нет. 2, стр. 1–25, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Б. Пу, К. Ли, С. Ли и Н. Чжу, «Автоматическое распознавание стандартной плоскости ультразвукового исследования плода на основе глубокого обучения и IIoT», IEEE Transactions on Industrial Informatics , vol. 17, нет. 11, стр. 7771–7780, 2021.
Посмотреть по адресу:
Сайт издателя | Академия Google
J.
 Sun, Интеллектуальная система контроля температуры печи сопротивления на основе PID с одним нейроном , Даляньский технологический университет, Ляонин, Далянь, 2008.
Sun, Интеллектуальная система контроля температуры печи сопротивления на основе PID с одним нейроном , Даляньский технологический университет, Ляонин, Далянь, 2008.L. Lu, G. Zhang, and W.-M. Вонг, «Настройка параметров ПИД-регулятора на основе алгоритма летучих мышей», Control Engineering , vol. 24, нет. 3, стр. 548–553, 2017.
Посмотреть по адресу:
Сайт издателя | Google Scholar
C. Wu, W. Huang и H. Meng, «Исследование управления соотношением воздух-топливо в двигателе на основе алгоритма летучей мыши, настраивающего PID», Журнал Сучжоуского университета науки и технологий (издание по естественным наукам) , том. 37, нет. 3, pp. 80–84, 2020.
Посмотреть по адресу:
Google Scholar
X. Yang, «Новый метаэвристический алгоритм, вдохновленный летучими мышами», в Proceedings of the Nature Inspired Cooperative Strategies for Optimization (NICSO 2010) , J.
 R. González, D. A. Pelta, C. Cruz, G. Terrazas, and N. Krasnogor, Eds., Springer, Гранада, Испания, апрель 2010 г.
R. González, D. A. Pelta, C. Cruz, G. Terrazas, and N. Krasnogor, Eds., Springer, Гранада, Испания, апрель 2010 г.Просмотр:
Сайт издателя | Google Scholar
Л. Лю, С. Лю и С. Чжоу, «Метод развязки многопараметрической системы на основе нечеткой нейронной сети», Журнал Океанического университета Китая, , том. 43, нет. 2, pp. 99–104, 2013.
Просмотр по адресу:
Google Scholar
W. Cai and H. Han, Исследование прогноза спроса на портовую логистику на основе комбинированной модели нейронных сетей BP и RBF , Journal Университета Чжэнчжоу (Engineering Edition, Чжэнчжоу, стр. 1–7, 2020 г.).
В. Ян и X. Чжан, «Система распознавания речи на основе TMS320C5409», Journal of Taiyuan University of Technology , vol. 6, стр. 524–527, 2007.
Посмотреть по адресу:
Google Scholar
Дж.
 Ли, Д. Лю и Ю. Чжу, «Развязка управления кондиционером VAV на основе нейронной сети», Журнал Шэньянского университета Цзяньчжу (издание естественных наук) , том. 29, нет. 1, стр. 187–192, 2013.
Ли, Д. Лю и Ю. Чжу, «Развязка управления кондиционером VAV на основе нейронной сети», Журнал Шэньянского университета Цзяньчжу (издание естественных наук) , том. 29, нет. 1, стр. 187–192, 2013.Посмотреть по адресу:
Google Scholar
Л. Чжэн, Г. Ли, Дж. Ан и Ф. Лу, «Математическое моделирование и оптимальное управление подземной вентиляцией и кондиционированием воздуха на станции», Mathematical Problems in Engineering , vol. 2022, ID статьи 5032564, стр. 1–16, 2022.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Copyright
Copyright © 2022 Lei Zheng et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Обнаружение и диагностика неисправностей кондиционеров и тепловых насосов
ПРОЕКТЫ/ПРОГРАММЫ
Резюме
Методы обнаружения и диагностики неисправностей (FDD) получают все большее внимание для применения в оборудовании для кондиционирования воздуха в качестве метода снижения потребления энергии и хладагента выбросов и обеспечить более надежный комфорт. Ожидается, что программы скидок коммунальных предприятий и нормы энергопотребления в зданиях будут способствовать использованию методов FDD в качестве экономически эффективных мер по повышению энергоэффективности, что приведет к более широкому признанию на рынке. Этот проект ускорит проникновение на рынок технологии FDD для кондиционеров и тепловых насосов за счет разработки эффективных алгоритмов FDD, разработки инструментов измерения производительности с открытым исходным кодом и формулирования стандартной процедуры оценки различных коммерческих продуктов FDD на основе их потенциала для предотвращения снижения производительности и повышения производительности. потребление энергии.
потребление энергии.
Описание
Цель — Разработка методов обнаружения и диагностики неисправностей (FDD) и инструментов измерения для обеспечения того, чтобы кондиционеры (AC) и тепловые насосы (HP) работали в соответствии с проектом на протяжении всего срока службы, и разработка методологии тестирования и оценки для оценки относительной достоинства различных коммерческих продуктов FDD.
Что такое новая техническая идея?
Этот проект будет способствовать развитию науки об измерениях и облегчит внедрение методов FDD в жилых помещениях путем выполнения двух исследовательских задач. Первая задача будет заключаться в разработке новых адаптируемых алгоритмов FDD для обнаружения сбоев в работе переменного тока и высокого давления. Адаптивные методы FDD необходимы для учета различных установок оборудования и эффектов старения. Сформированные наборы данных для безотказной и неисправной работы жилых кондиционеров очень хорошо подходят для обработки алгоритмами машинного обучения. Большая база кодов машинного обучения с открытым исходным кодом доступна во всемирной паутине; одним источником является система репозитория GitHub. Сочетание потока данных регистратора данных FDD, разработанного NIST, с ресурсами облачных вычислений, использующими алгоритмы машинного обучения, будет исследовано для разработки и демонстрации облачных методов FDD для оборудования переменного тока. Обобщение этих методов и применение статистических методов, заложенных в алгоритмах FDD, предоставит промышленности США возможности для инноваций и будет способствовать более быстрому внедрению этой технологии на рынок. Эти методы FDD применимы не только к бытовым тепловым насосам, но и к другим системам, работающим по принципу парокомпрессии.
Большая база кодов машинного обучения с открытым исходным кодом доступна во всемирной паутине; одним источником является система репозитория GitHub. Сочетание потока данных регистратора данных FDD, разработанного NIST, с ресурсами облачных вычислений, использующими алгоритмы машинного обучения, будет исследовано для разработки и демонстрации облачных методов FDD для оборудования переменного тока. Обобщение этих методов и применение статистических методов, заложенных в алгоритмах FDD, предоставит промышленности США возможности для инноваций и будет способствовать более быстрому внедрению этой технологии на рынок. Эти методы FDD применимы не только к бытовым тепловым насосам, но и к другим системам, работающим по принципу парокомпрессии.
Устройства FDD, как и любые другие продукты, продаваемые на основе функциональности, должны иметь свои показатели производительности, определяемые для содействия конкуренции на рынке и улучшения продукта. В рамках второй исследовательской задачи этого проекта будут разработаны две метрики производительности для модулей FDD: первая, «энергетическая», метрика будет отражать потенциальную экономию энергии в результате обнаружения/исправления различных неисправностей, а вторая метрика будет отражать способность устройства FDD к избежать ложных срабатываний.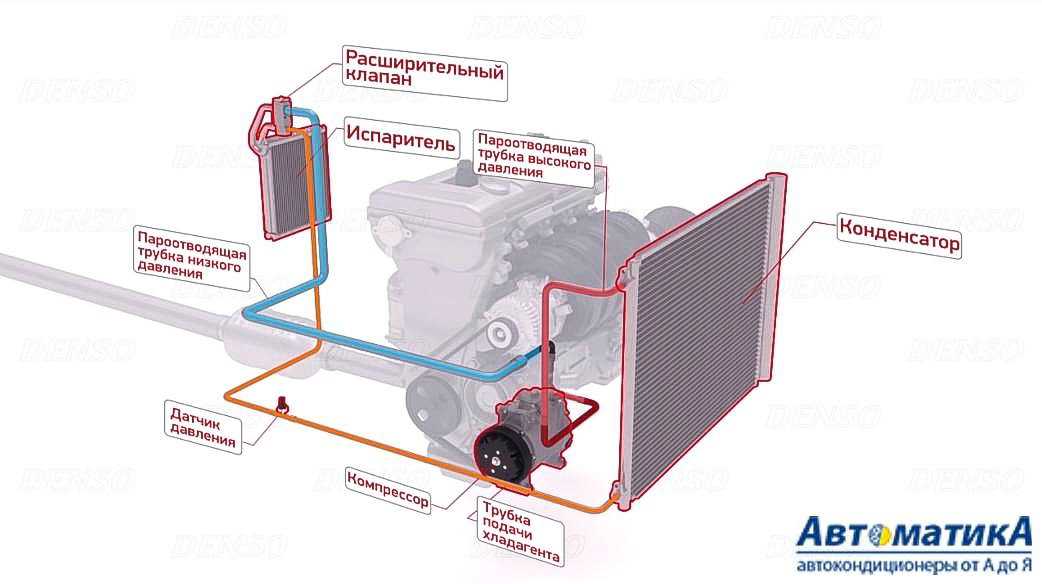
Основными продуктами проекта будут база данных безошибочной и ошибочной работы и AC/HP FDD Tester/Evaluator. Во время тестирования коммерческого метода FDD (например, алгоритма, встроенного в блок управления тепловым насосом или в стороннее портативное устройство FDD) тестер/оценщик FDD AC/HP выводит набор параметров теплового насоса, которые потенциально могут использоваться модулем FDD, и на основе этих параметров модуль выполнит диагностику «здоровья» системы теплового насоса. Расчет «энергетической» метрики будет включать данные о погоде для взвешивания надежности диагностических возможностей устройства FDD в течение всего года.
Каков план исследования?
Для достижения целей этого проекта были определены две дополнительные задачи. Целью Задачи 1 является разработка и усовершенствование адаптируемого (самообучающегося) алгоритма FDD, подходящего для развертывания в системах, собираемых на месте. Предыдущие усилия разработали новую методологию самообучения для разработки моделей безотказной работы сплит-теплового насоса, работающего в режиме охлаждения.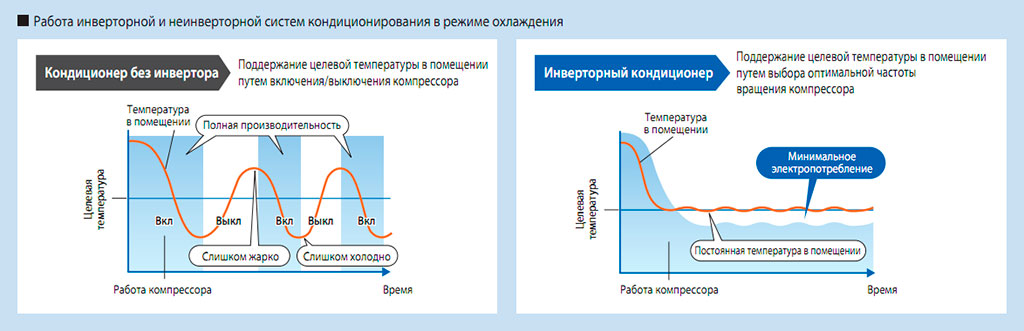 Эта методология была разработана с использованием стационарных лабораторных измерений, проведенных в предыдущие годы, а затем усовершенствована с использованием дополнительных лабораторных данных, в том числе циклических. Однако для его проверки требовались данные «реального мира», включая системные циклы и шумовые переходные процессы. На первом этапе этой проверки использовались рабочие данные теплового насоса, установленного в жилом испытательном центре NIST с нулевым потреблением энергии (NZERTF). Второй этап проверки требует данных, собранных из дома, в котором живут люди. Помня об этой цели, мы сформулировали проект SBIR для разработки прототипа пользовательского регистратора сбора данных для удаленного мониторинга жилых раздельных систем переменного тока и систем HP. В рамках этого проекта SBIR было создано оборудование, необходимое для удаленного мониторинга жилой сплит-системы, что привело к лучшему пониманию проблем, связанных с удаленным мониторингом, и позволило нам изучить и применить возможности технологии Интернета вещей (IoT) для измерения, управления , и войти с небольшими затратами.
Эта методология была разработана с использованием стационарных лабораторных измерений, проведенных в предыдущие годы, а затем усовершенствована с использованием дополнительных лабораторных данных, в том числе циклических. Однако для его проверки требовались данные «реального мира», включая системные циклы и шумовые переходные процессы. На первом этапе этой проверки использовались рабочие данные теплового насоса, установленного в жилом испытательном центре NIST с нулевым потреблением энергии (NZERTF). Второй этап проверки требует данных, собранных из дома, в котором живут люди. Помня об этой цели, мы сформулировали проект SBIR для разработки прототипа пользовательского регистратора сбора данных для удаленного мониторинга жилых раздельных систем переменного тока и систем HP. В рамках этого проекта SBIR было создано оборудование, необходимое для удаленного мониторинга жилой сплит-системы, что привело к лучшему пониманию проблем, связанных с удаленным мониторингом, и позволило нам изучить и применить возможности технологии Интернета вещей (IoT) для измерения, управления , и войти с небольшими затратами.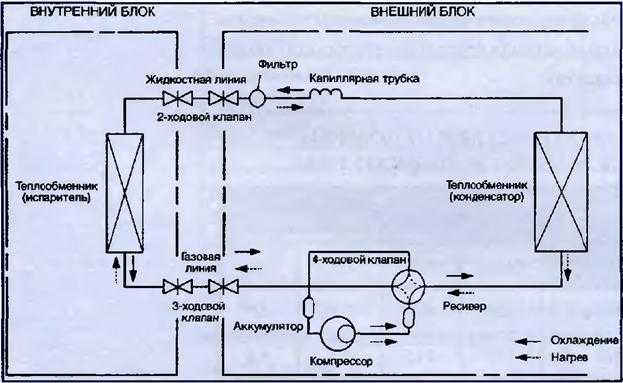 Используя этот проект SBIR в качестве основы, мы разработали новый регистратор данных, который устраняет некоторые недостатки регистратора данных первого поколения. В частности, новый регистратор дешевле, его проще программировать, он использует полную версию Python, имеет больший объем памяти/хранилища и более доступный открытый исходный код. Мы доработаем новый регистратор данных и будем использовать его для проведения измерений в установленных на месте системах, в которых находятся люди, чтобы проверить производительность нашего самообучающегося протокола FDD. Мы также изучим возможности применения методов на основе искусственного интеллекта для повышения надежности текущего протокола FDD.
Используя этот проект SBIR в качестве основы, мы разработали новый регистратор данных, который устраняет некоторые недостатки регистратора данных первого поколения. В частности, новый регистратор дешевле, его проще программировать, он использует полную версию Python, имеет больший объем памяти/хранилища и более доступный открытый исходный код. Мы доработаем новый регистратор данных и будем использовать его для проведения измерений в установленных на месте системах, в которых находятся люди, чтобы проверить производительность нашего самообучающегося протокола FDD. Мы также изучим возможности применения методов на основе искусственного интеллекта для повышения надежности текущего протокола FDD.
Целью Задачи 2 является разработка метода тестирования для оценки протоколов AC и HP FDD. На более раннем этапе проекта была разработана бета-версия тестера/оценщика со встроенной обратной моделью переменного тока, основанной на конкретном блоке переменного тока. Функция модели заключается в создании безошибочных и ошибочных сценариев для тестирования/оценки методологий FDD.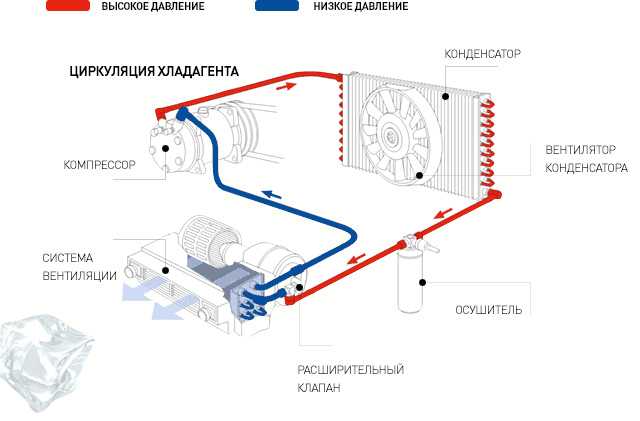 Однако последующие тесты и исследования показали, что разные контроллеры доступа могут по-разному реагировать и в разной степени снижать производительность при одинаковых неисправностях, что увеличивает сложность рассматриваемой проблемы. С этим выводом важными элементами этой Задачи 2 являются: (1) развитие понимания того, как различные типы и конфигурации систем реагируют на распространенные неисправности; (2) разработка «безопасных» сценариев тестирования ошибок; и (3) разработка показателей производительности для протоколов FDD. В поддержку этой задачи мы выполнили обширную программу лабораторных испытаний низкоэффективных и высокоэффективных кондиционеров для более подробного изучения их реакции на одиночные и множественные одновременные неисправности. Программа испытаний включала измерения общей мощности охлаждения/обогрева, скрытой мощности, потребности в электроэнергии, эффективности, температуры/давления хладагента в ключевых точках системы, а также оценку интенсивности отказов.
Однако последующие тесты и исследования показали, что разные контроллеры доступа могут по-разному реагировать и в разной степени снижать производительность при одинаковых неисправностях, что увеличивает сложность рассматриваемой проблемы. С этим выводом важными элементами этой Задачи 2 являются: (1) развитие понимания того, как различные типы и конфигурации систем реагируют на распространенные неисправности; (2) разработка «безопасных» сценариев тестирования ошибок; и (3) разработка показателей производительности для протоколов FDD. В поддержку этой задачи мы выполнили обширную программу лабораторных испытаний низкоэффективных и высокоэффективных кондиционеров для более подробного изучения их реакции на одиночные и множественные одновременные неисправности. Программа испытаний включала измерения общей мощности охлаждения/обогрева, скрытой мощности, потребности в электроэнергии, эффективности, температуры/давления хладагента в ключевых точках системы, а также оценку интенсивности отказов. Цель состоит в том, чтобы оценить способность обратной модели переменного тока воспроизводить реакции, вызванные отказом, наблюдаемые в ходе лабораторных испытаний, и изменить/обновить модель для достижения воспроизводимости, если это возможно, или разработать другие концепции для тестирования методов FDD.
Цель состоит в том, чтобы оценить способность обратной модели переменного тока воспроизводить реакции, вызванные отказом, наблюдаемые в ходе лабораторных испытаний, и изменить/обновить модель для достижения воспроизводимости, если это возможно, или разработать другие концепции для тестирования методов FDD.
Стандартный проектный комитет ASHRAE 207P «Лабораторный метод испытаний по обнаружению и диагностике неисправностей, применяемых в коммерческих блочных системах с воздушным охлаждением» был сформирован в январе 2012 года. Проект метода тестирования экономайзеров воздушной стороны в блочных крышных установках был опубликован для общественности. консультативный комментарий в 2018 г. Окончательная версия была выпущена для публичного рассмотрения в последнем квартале 2019 г. Были рассмотрены существенные комментарии по итогам публичного рассмотрения, и пересмотренный стандарт был представлен на окончательное утверждение Комитету по стандартам ASHRAE в мае 2020 г. Комитет напрямую использовал концепции и программное обеспечение, разработанные NIST в задачах 1 и 2, для разработки методов испытаний для различных типов неисправностей.