
Электродвигатель постоянного тока — Википедия
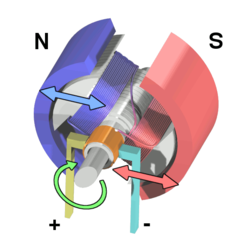 Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным роторомЭлектродвигатель постоянного тока (ДПТ) — электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
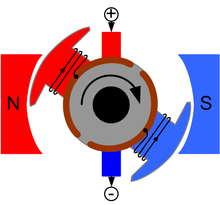 Схема электродвигателя с двумя обмотками электромагнита на якоре
Схема электродвигателя с двумя обмотками электромагнита на якоре 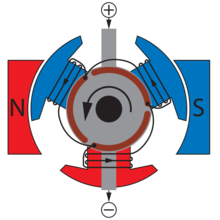 Схема электродвигателя с тремя обмотками электромагнита на якоре
Схема электродвигателя с тремя обмотками электромагнита на якореЭтот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), одного электромагнита с явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Простейший двигатель имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). В этом случае крутящий момент равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)},
где s{\displaystyle s} — число витков обмотки ротора,
B{\displaystyle B} — индукция магнитного поля полюсов статора,
I{\displaystyle I} — ток в обмотке ротора [А],
L{\displaystyle L} — длина рабочей части витка обмотки [м],
r{\displaystyle r} — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
sin{\displaystyle \sin } — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
w{\displaystyle w} — угловая скорость [рад/сек],
t{\displaystyle t} — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
- n⋅α/(2⋅π){\displaystyle n\cdot \alpha /(2\cdot \pi )},
где n{\displaystyle n} — число щёток,
α{\displaystyle \alpha } — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s{\displaystyle s} рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1 оборот = 2π{\displaystyle 2\pi }):
- Mkrsr=(2⋅∫0πs⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=s⋅2⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
 Рис. 2 Коллекторный двухполюсный двигатель постоянного тока с тремя зубцами на роторе
Рис. 2 Коллекторный двухполюсный двигатель постоянного тока с тремя зубцами на ротореДвигатель, показанный на рис. 2, состоит из:
— одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой,
— ротора с тремя зубцами и, соответственно, с тремя обмотками (обмотки ротора при такой конструкции могут быть включены звездой (в столь маломощной машине условия коммутации допускают такое соединение) или треугольником),
— щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками.
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухзубцовым ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы постоянного тока.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор (индуктор)[править | править код]
На статоре ДПТ располагаются, в зависимости от конструкции, или постоянные магниты (микродвигатели), или электромагниты с обмотками возбуждения (катушками, наводящими магнитный поток возбуждения).
В простейшем случае статор имеет два полюса, то есть один магнит с одной парой полюсов. Но чаще ДПТ имеют две пары полюсов. Бывает и более. Помимо основных полюсов на статоре (индукторе) могут устанавливаться добавочные полюса, которые предназначены для улучшения коммутации на коллекторе.
Ротор (якорь)[править | править код]
Минимальное число зубцов ротора, при котором самозапуск возможен из любого положения ротора — три. Из трёх, кажущихся явно выраженными, полюсов, на самом деле один полюс всё время находится в зоне коммутации, то есть ротор имеет минимум одну пару полюсов (как и статор, так как в противном случае работа двигателя невозможна).
Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его, в первом приближении, можно считать сплошным однородным цилиндром с моментом инерции, равным:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}},
где m{\displaystyle m} — масса цилиндра (ротора),
а R{\displaystyle R} — радиус цилиндра (ротора).
Коллектор[править | править код]
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции: является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
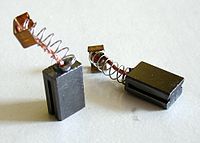 Рис. 4 Графитовые щётки
Рис. 4 Графитовые щёткиЩёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора недопустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Принципу работы электродвигателя постоянного тока может быть дано два описания:
- 1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
или
- 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, в однородном магнитном поле полюсов статора с индукцией B{\displaystyle B}, на два стержня рамки длиной L{\displaystyle L}, и с током I{\displaystyle I}, действует сила Ампера F{\displaystyle F}, постоянной величины, равные:
- F=B⋅I⋅L{\displaystyle F=B\cdot I\cdot L} и направленные в противоположные стороны.
Эти силы прикладываются к плечам p{\displaystyle p}, равным:
- p=r⋅sin(w⋅t){\displaystyle p=r\cdot \sin(w\cdot t)}, где r{\displaystyle r} — радиус рамки;
и создают крутящий момент Mk{\displaystyle M_{k}}, равный:
- Mk=F⋅p=B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}=F\cdot p=B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Для двух стержней рамки, суммарный крутящий момент равен:
- Mks=2⋅Mk=2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}s=2\cdot M_{k}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Практически (из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta }, между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко) четыре небольших части под кривой крутящего момента, равные:
- 2⋅B⋅I⋅L⋅r⋅∫0δ/2sin(w⋅t)d(w⋅t){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}\sin(w\cdot t)d(w\cdot t)}, где δ=β−α{\displaystyle \delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s{\displaystyle s}, крутящий момент будет равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Наибольший крутящий момент будет при угле поворота рамки равном: π/2{\displaystyle \pi /2}, то есть при угле 90°.
При этом угле поворота рамки с током, вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, то есть под углом 90°. При угле поворота ротора (рамки) равном 180°, крутящий момент равен нулю (из-за нулевого плеча), но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента, делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=(2⋅∫0πB⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
При s{\displaystyle s} витков в обмотке:
- Mkrsr=s⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=s\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Две рамки с током в однородном магнитном поле полюсов статора[править | править код]
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π/2{\displaystyle \pi /2}, то получится четырёхполюсный ротор.
Момент второй рамки:
- Mc=2⋅B⋅I⋅L⋅r⋅sin(ωt+π/2)=2⋅B⋅I⋅L⋅r⋅cos(ωt){\displaystyle M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(\omega t+\pi /2)=2\cdot B\cdot I\cdot L\cdot r\cdot \cos(\omega t)}.
Суммарный момент обеих рамок:
- Mk=Ms+Mc=2⋅B⋅I⋅L⋅r⋅(sin(ωt)+cos(ωt)){\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot (\sin(\omega t)+\cos(\omega t))}.
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta } (в радианах) между пластинами коллектора (ламелями), восемь небольших частей под кривой крутящего момента, равных:
- 2⋅B⋅I⋅L⋅r∫0Δ/2sin(ωt)⋅d(ωt){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\int \limits _{0}^{\Delta /2}\sin(\omega t)\cdot d(\omega t)}, где Δ=β−α{\displaystyle \Delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора[править | править код]
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону:
- B=Bm⋅sin(ω⋅t){\displaystyle B=B_{m}\cdot \sin(\omega \cdot t)},
то крутящий момент для одного стержня будет равен:
- M=Bm⋅sin(ω⋅t)⋅I⋅L⋅r⋅sin(ω⋅t)=Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M=B_{m}\cdot \sin(\omega \cdot t)\cdot I\cdot L\cdot r\cdot \sin(\omega \cdot t)=B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для двух стержней:
- Ms=2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для рамки из s{\displaystyle s} витков:
- Mss=s⋅2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}s=s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}}.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные:
- s⋅2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(ω⋅t))2d(ω⋅t).{\displaystyle s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(\omega \cdot t))^{2}d(\omega \cdot t).}
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=2⋅∫0πBm⋅I⋅L⋅r⋅(sin(ω⋅t))2d(ω⋅t)/(2⋅π)=Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t)/π{\displaystyle Mkrsr=2\cdot \int \limits _{0}^{\pi }B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}d(\omega \cdot t)/(2\cdot \pi )=B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t)/\pi }.
При s{\displaystyle s} витках в обмотке:
- Mkrsr=(s⋅Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t))/π{\displaystyle Mkrsr=(s\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t))/\pi }.
Две рамки с током в неоднородном магнитном поле полюсов статора[править | править код]
Для второй (косинусной) рамки:
- sin(w⋅t+π/2)=cos(w⋅t){\displaystyle \sin(w\cdot t+\pi /2)=\cos(w\cdot t)};
крутящий момент от второй (косинусной) рамки будет равен:
- Mc=2⋅Bm⋅I⋅L⋅r⋅(cos(w⋅t))2{\displaystyle M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\cos(w\cdot t))^{2}},
суммарный крутящий момент от обеих рамок равен:
- Mk=Ms+Mc=2⋅Bm⋅I⋅L⋅r⋅((sin(w⋅t))2+(cos(w⋅t))2)=2⋅Bm⋅I⋅L⋅r{\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot ((\sin(w\cdot t))^{2}+(\cos(w\cdot t))^{2})=2\cdot B_{m}\cdot I\cdot L\cdot r},
то есть постоянен, и от угла поворота ротора не зависит.
Практически из-за наличия зазора восемь небольших частей, под кривой крутящего момента, равные:
- 2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(w⋅t))2d(w⋅t){\displaystyle 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(w\cdot t))^{2}d(w\cdot t)} каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать, в первом приближении, сплошным однородным цилиндром с моментом инерции:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}}, где m{\displaystyle m} — масса цилиндра (ротора), R{\displaystyle R} — радиус цилиндра (ротора).
Взаимодействие магнитных полей[править | править код]
Необходимо отметить, что работа по вращению ротора (рамки с током) совершается не за счет энергии внешнего магнитного поля (поля статора), а за счет источника тока, поддерживающего неизменным ток в контуре рамки. При изменениях магнитного потока, пронизывающего контур (рамку с током) при вращении, в этом контуре возникает э.д.с. индукции, направленная противоположно э.д.с. источника тока. Следовательно, источник тока, кроме работы, затрачиваемой на выделение ленц-джоулева тепла, должен совершать дополнительную работу против э.д.с. индукции. Сам же процесс вращения происходит за счет силы Ампера, действующей на проводник с электрическим током, находящийся в магнитном поле. Правильное мнение, что ротор (рамка с током) приходит в движение за счет того, что его магнитное поле отталкивается от магнитного поля статора.
Все электродвигатели постоянного тока автоматически создают вращающий момент, равный моменту сопротивления на валу и при этом частота вращения устанавливается постоянной[1].
Предположим, что момент сопротивления Mr{\displaystyle M_{r}} возрос и стал больше момента вращения Md{\displaystyle M_{d}}. В соответствии с уравнением механики Md−Mr=JdΩdt{\displaystyle M_{d}-M_{r}=J{\frac {d\Omega }{dt}}} появляется отрицательное ускорение dΩdt<0{\displaystyle {\frac {d\Omega }{dt}}<0} и частота вращения якоря n=60Ω2π{\displaystyle n={\frac {60\Omega }{2\pi }}} начинает падать. Вместе с частотой вращения якоря падает противо-ЭДС E=CenΦ{\displaystyle E=C_{e}n\Phi }, а ток якоря I=U−ER{\displaystyle I={\frac {U-E}{R}}} и вращающий момент Md=CmΦI{\displaystyle M_{d}=C_{m}\Phi I}
Оборот в минуту — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 23 декабря 2013; проверки требуют 19 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 23 декабря 2013; проверки требуют 19 правок. Тахометр автомобиля (количество оборотов коленвала двигателя за минуту)Оборо́т в мину́ту (обозначение об/мин, 1/мин, мин−1, также часто используется английское обозначение rpm [revolutions per minute]) — единица измерения частоты вращения: количество полных оборотов, совершенных вокруг фиксированной оси. Используется для измерения скорости вращения механических компонентов.
Также используется единица оборот в секунду (символ об/с или с−1). Обороты в минуту конвертируются в обороты в секунду делением на 60. Обратное преобразование: обороты в секунду умножаются на 60 для перевода в обороты в минуту.
- 1 об/мин = 1/мин = 1/(60с) = 1/60 об/с ≈ 0,01667 об/с
Ещё одна физическая величина связана с данным понятием: угловая скорость; в системе СИ она измеряется в радианах в секунду (символ рад·с−1 или рад/с):
- 1 об/мин = 2π рад·мин−1 = 2π/60 рад·с−1 = 0,1047 рад·с−1 ≈ 1/10 рад·с−1
- На граммофонных пластинках скорость вращения указывается в оборотах в минуту (об. в мин., об/мин). Стандартные скорости вращения 16
+2⁄3, 33+1⁄3, 45 или 78 об/мин (5⁄18, 5⁄9, 3⁄4, или 1,3 об/с соответственно). - Современные стоматологические бормашины имеют скорость вращения до 800 000 об/мин (13 300 об/с).
- Секундная стрелка часов вращается с частотой 1 об/мин.
- Проигрыватели компакт-дисков производят чтение со скоростью 150 кБ/с и, следовательно, при скорости вращения диска у внутреннего края примерно 500 об / мин (8 об/с) и 200 об / мин (3,5 об/с) на внешней границе. Приводы компакт дисков имеют скорость вращения, кратную этим цифрам, даже если используется переменная скорость чтения.
- DVD-проигрыватели обычно также читают диски с постоянной линейной скоростью. Скорость вращения изменяется от 1 530 об/мин (25,5 об/с), при чтении у внутреннего края, и 630 об/мин (10,5 об/с) на внешней стороне диска.[1] DVD-приводы также работают на скорости, кратной вышеназванным цифрам.
- Барабан стиральной машины может вращаться со скоростью от 500 до 2000 об/мин (8–33 об/с) во время отжима.
- Турбина генератора ТЭС вращается со скоростью 3000 об/мин (50 об/с) или 3600 об/мин (60 об/с), в зависимости от страны (см. Переменный ток#Стандарты частоты). Вал генератора гидроэлектростанции может вращается медленнее: до 2 об/с (при этом частота сети 50 Гц получается за счет наличия большего количества полюсов катушек статора).
- Двигатель легкового автомобиля работает, как правило, на скорости 2500 об/мин (41 об/с), обороты холостого хода около 1000 об/мин (16 об/с), а максимальные обороты 6000—10 000 об/мин (100—166 об/с).
- Воздушный винт самолёта обычно вращается со скоростью между 2000 и 3000 об/мин (30-50 об/с).
- Компьютерный жесткий диск с интерфейсами ATA или SATA вращается со скоростью 5400 или 7200 об/мин (90 или 120 об/с), за редким исключением 10 000 об/мин, а серверные жёсткие диски диски с интерфейсами SCSI и SAS используют скорость 10 000 или 15 000 об/мин (160 или 250 об/с).
- Двигатель болида формулы один может развить 18 000 об/мин (300 об/с) (по регламенту сезона 2009).
- Центрифуга по обогащению урана вращается со скоростью 90 000 об/мин (1500 об/с) или быстрее.[2].
- Газотурбинный двигатель вращается со скоростью десятки тысяч оборотов в минуту. Турбины для моделей самолетов могут разгоняться до 100 000 об/мин (1700 об/с), а самые быстрые и до 165 000 об/мин (2750 об/с)[3].
- Типичный 80-мм компьютерный вентилятор вращается со скоростью 800—3000 об/мин и питается от 12 В постоянного тока.
- Турбокомпрессор может достигнуть скорости вращения 290 000 об/мин (4800 об/с), при том, что 80 000—200 000 об/мин (1000—3000 об/с) используются при спокойной езде.
- Скорость вращения космической станции, типа Стэнфордский тор, для достижения гравитации в 1g и комфортной для человека, должна составлять 2 оборота в минуту или менее, для минимизации эффекта укачивания (см. Сила Кориолиса).
частота вращения двигателя — это… Что такое частота вращения двигателя?
- частота вращения двигателя
3.32 частота вращения двигателя: Частота вращения коленчатого вала двигателя в минуту.
3.7 частота вращения двигателя: Частота вращения коленчатого вала двигателя в единицу времени.
3.8. Частота вращения двигателя — указанная изготовителем максимальная частота вращения двигателя, ограниченная регулятором (при установке рычага управления в положение максимальной подачи топлива).
Словарь-справочник терминов нормативно-технической документации. academic.ru. 2015.
- Частота вращения w
- частота вращения двигателя, соответствующая максимальному крутящему моменту
Смотреть что такое «частота вращения двигателя» в других словарях:
частота вращения двигателя, соответствующая максимальному крутящему моменту — 3.11 частота вращения двигателя, соответствующая максимальному крутящему моменту: Частота вращения двигателя, соответствующая максимальному крутящему моменту, на упоре топливной рейки, включающая в себя дополнительный крутящий момент, создаваемый … Словарь-справочник терминов нормативно-технической документации
Максимальная частота вращения двигателя — Наибольшая допустимая при эксплуатации частота вращения коленчатого вала двигателя Источник: ГОСТ 10150 88: Двигатели судовые, тепловозные и промышленные. Общие технические условия … Словарь-справочник терминов нормативно-технической документации
Номинальная частота вращения двигателя — 3.5. Номинальная частота вращения двигателя частота вращения коленчатого вала (об/мин), при которой согласно документации изготовителя двигатель должен развивать номинальную мощность. Источник: ГОСТ 27247 87: Машины землеройные. Метод определения … Словарь-справочник терминов нормативно-технической документации
минимально устойчивая частота вращения двигателя на холостом ходу — 3.10 минимально устойчивая частота вращения двигателя на холостом ходу: Минимальная частота вращения коленчатого вала двигателя на холостом ходу, допустимая в эксплуатации. Источник … Словарь-справочник терминов нормативно-технической документации
объявленная частота вращения двигателя — 3.8 объявленная частота вращения двигателя: Частота вращения двигателя, соответствующая объявленной мощности. Для некоторых применений двигателей объявленная частота вращения называется номинальной частотой вращения. Источник … Словарь-справочник терминов нормативно-технической документации
объявленная промежуточная частота вращения двигателя — 3.9 объявленная промежуточная частота вращения двигателя: Частота вращения двигателя, составляющая менее 100 % объявленной частоты вращения, заявленной изготовителем, с учетом требований, установленных для конкретного применения двигателя.… … Словарь-справочник терминов нормативно-технической документации
Минимально устойчивая частота вращения двигателя под нагрузкой — Минимальная частота вращения коленчатого вала двигателя под нагрузкой, допустимая в эксплуатации Источник: ГОСТ 10150 88: Двигатели судовые, тепловозные и промышленные. Общие технические условия … Словарь-справочник терминов нормативно-технической документации
максимальная частота вращения двигателя внутреннего сгорания — 3.6 максимальная частота вращения двигателя внутреннего сгорания [электродвигателя]: Примечание Максимальную частоту вращения двигателя внутреннего сгорания [электродвигателя] устанавливают при регулировке машины в соответствии с требованиями… … Словарь-справочник терминов нормативно-технической документации
номинальная частота вращения двигателя S — 3.4 номинальная частота вращения двигателя S (rated engine speed): Частота вращения коленчатого вала (число оборотов в минуту), при которой двигатель развивает максимальную полезную мощность, установленную производителем. Источник: ГОСТ ИС … Словарь-справочник терминов нормативно-технической документации
номинальная частота вращения двигателя в минуту — — [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность EN rated engine speed … Справочник технического переводчика
Скольжение асинхронного двигателя — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014; проверки требуют 14 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014; проверки требуют 14 правок.Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
s=(n1−n)/n1{\displaystyle s=(n_{1}-n)/n_{1}},
где n{\displaystyle n} — скорость вращения ротора асинхронного двигателя, об/мин
n1{\displaystyle n_{1}} — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{\displaystyle n_{1}=60\times f/p},
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
- s=(n1−n1)/n1=0{\displaystyle s=(n_{1}-n_{1})/n_{1}=0}.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1{\displaystyle n_{1}} и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором n=n1{\displaystyle n=n_{1}}, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы асинхронного двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При s=0{\displaystyle s=0} поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой n>n1{\displaystyle n>n_{1}}, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне −∞<s<0{\displaystyle -\infty <s<0}, то есть оно может принимать любые отрицательные значения.
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
- s=[n1−(−n)]/n1=(n1+n)/n1>1{\displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне 1<s<+∞{\displaystyle 1<s<+\infty }.
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица. Поделиться:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||