
частотный преобразователь своими руками, как сделать
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками.
- Назначение частотного преобразователя
- Принцип работы устройства
- Самостоятельное изготовление прибора
- Делаем трехфазный преобразователь
- Частотник для однофазного двигателя
- Возможные проблемы при проверке
Назначение частотного преобразователя
Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Частотник дает возможность в широких пределах регулировать скорость электродвигателя, обеспечивает плавный пуск, позволяет регулировать как скорость запуска, так и скорость торможения, подключать трехфазный мотор к однофазной сети и многое другое. Все эти функции зависят от микроконтроллера, на котором он построен, и могут отличаться у разных моделей.
Принцип работы устройства
Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Вот упрощенная схема преобразователя частоты для трехфазного асинхронного двигателя.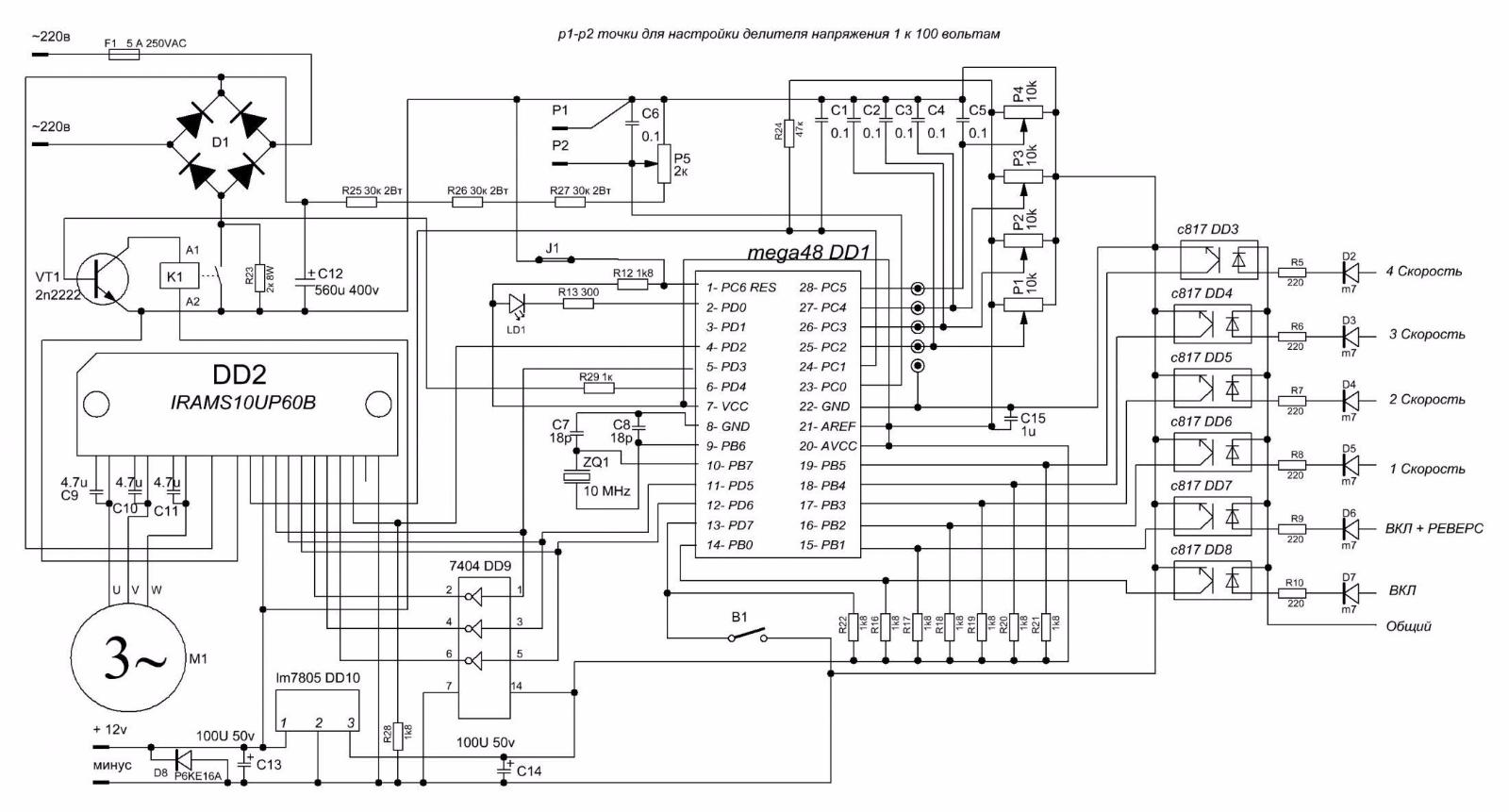
Теперь рассмотрим, что происходит с транзисторами и как они работают.
Полевой транзистор (он же ключ, мосфет и пр.) — это электронный выключатель, принцип его действия основан на возникновении проводимости между двумя выводами (сток и исток) мосфета, при появлении на управляющем выводе (затворе) напряжения, превышающего напряжение стока.
В отличие от обычных реле, ключи работают на очень высоких частотах (от нескольких герц до сотен килогерц) так что заменить их на реле не получится.
С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
К контроллеру, кроме мосфетов, также подключены датчики тока, органы управления частотником, и другая периферия.
При работе частотного преобразователя микроконтроллер измеряет потребляемую мощность и, в соответствии с установленными на панели управления параметрами, изменяет длительность и частоту периодов, когда транзистор открыт (включен) или закрыт (выключен), тем самым изменяя или поддерживая скорость вращения электродвигателя.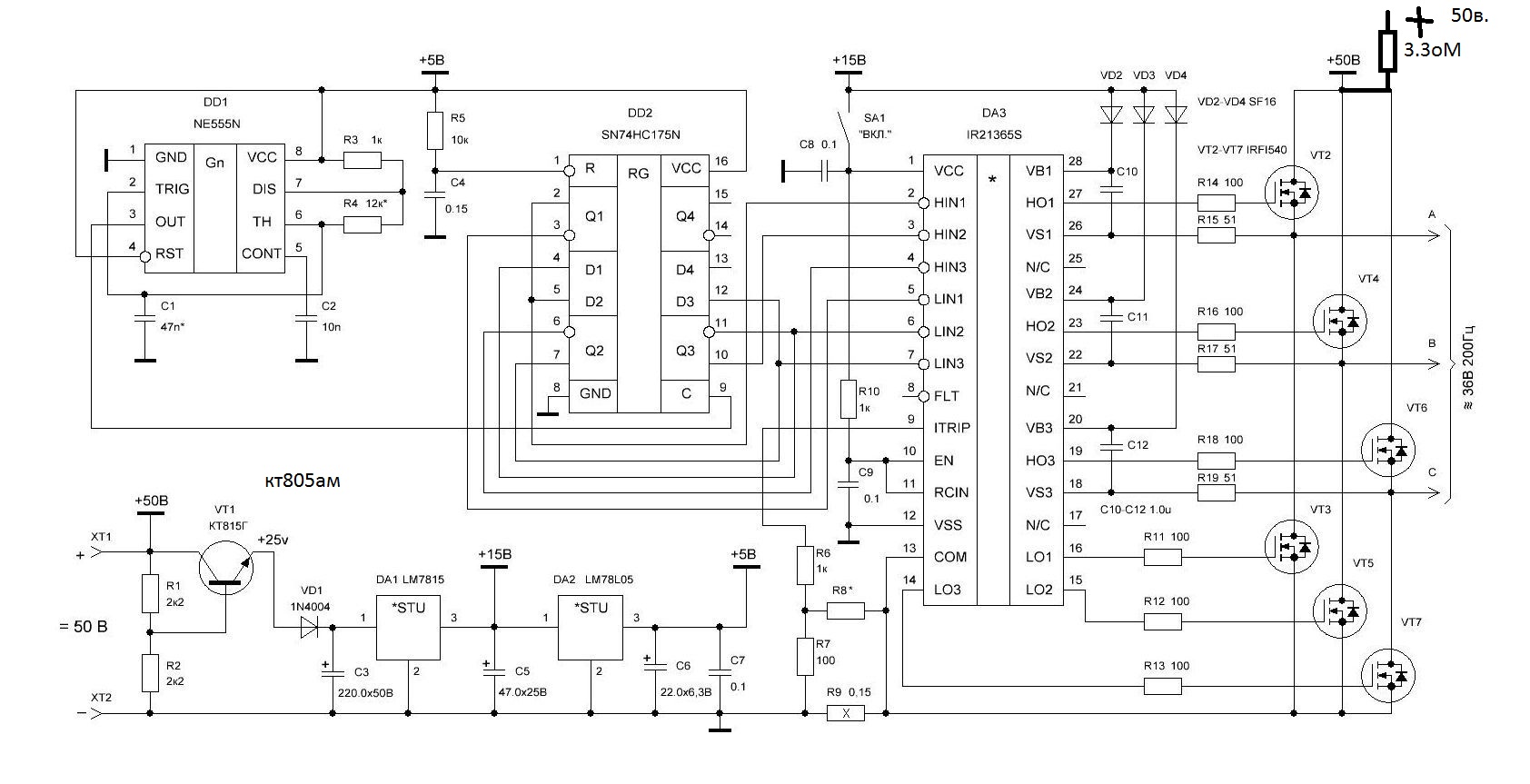
Самостоятельное изготовление прибора
Несмотря на множество агрегатов заводского производства, люди делают преобразователи частоты самостоятельно, благо на сегодняшний день все его компоненты можно купить в любом радиомагазине или заказать из Китая. Такой частотник обойдется вам значительно дешевле покупного, к тому же вы не будете сомневаться в качестве его сборки и надежности.
Делаем трехфазный преобразователь
Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собранный частотник при подключении в однофазную сеть 220 В будет иметь на выходе три полноценные фазы 220 В, со сдвигом 120°, и мощность 3 КВт.
Схема частотника выглядит так:
Так как частотный преобразователь состоит из частей, работающих как на высоком (силовая часть), так и на низком (управление) напряжении, то логично будет разбить его на три платы (основная плата, плата управления, и низковольтный блок питания для неё) для исключения возможности пробоя между дорожками с высоким и низким напряжением и выхода устройства из строя.
Вот так выглядит разводка платы управления:
Для питания платы управления можно использовать любой блок питания на 24 В, с пульсациями не более 1 В в размахе, с задержкой прекращения подачи питания на 2−3 секунды с момента исчезновения питающего напряжения 220 В.
Блок питания можно собрать и самим по этой схеме:
Обратите внимание, что номиналы и названия всех радиокомпонентов на схемах уже подписаны, так что собрать по ним работающее устройство может даже начинающий радиолюбитель.
Перед тем как приступить к сборке преобразователя, убедитесь:
- В наличии у вас всех необходимых компонентов;
- В правильности разводки платы;
- В наличии всех нужных отверстий для установки радиодеталей на плате;
- В том, что не забыли залить в микроконтроллер прошивку из этого архива:
Если вы все сделали правильно и ничего не забыли, можете приступать к сборке.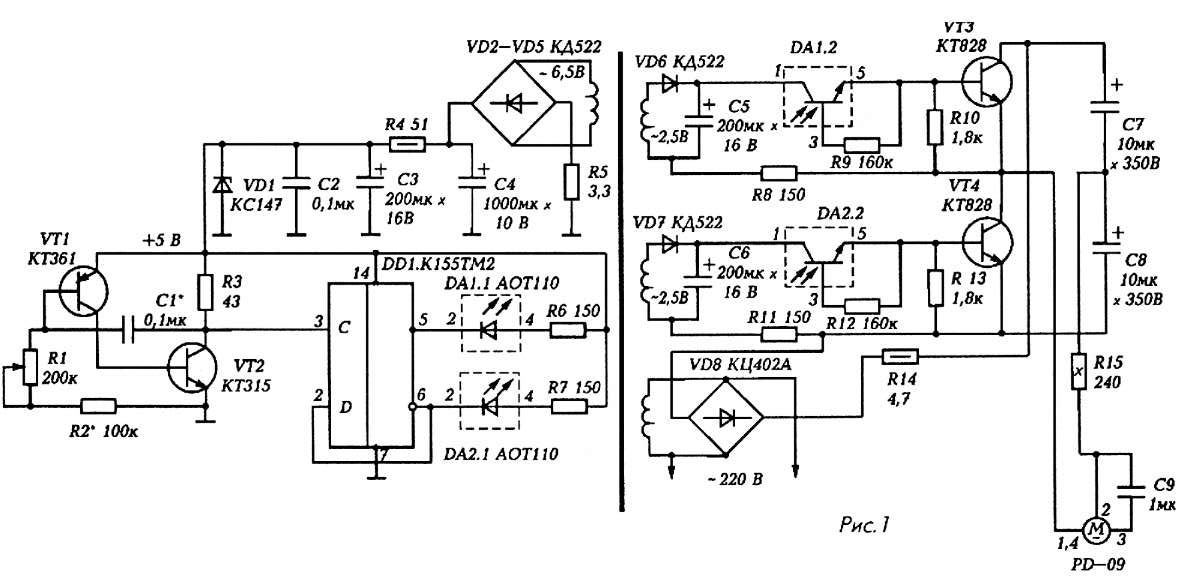
После сборки у вас получится что-то похожее:
Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Если проверка прошла успешно, то можете начинать изготавливать корпус и собирать в нем частотник. Не забудьте сделать в корпусе отверстия для притока холодного и оттока горячего воздуха от радиатора IGBT транзисторов.
Частотник для однофазного двигателя
Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
В качестве мозга этого преобразователя мы будем использовать МК ATmega328 с загрузчиком ардуины. В принципе, это и есть Arduino, только без своей обвязки. Так что, если у вас в закромах завалялась ардуинка с таким микроконтроллером, можете смело выпаивать его и использовать для дела, предварительно залив на него скетч (прошивку) из этого архива:
К атмеге будет подключен драйвер IR2132, а уже к нему — мосфеты IRG4BC30, к которым мы подключим двигатель мощностью до 1 КВт включительно.
Схема частотного преобразователя для однофазного двигателя:
Также для питания ардуины (5в) и для питания силового реле (12в), нам понадобятся 2 стабилизатора. Вот их схемы:
Стабилизатор на 12 вольт.
Стабилизатор на 5 вольт.
Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Еще обратите внимание на то, что включать схему без балласта нельзя — сгорят выходные ключи. Балласт нужно подключать через диод, обращенный анодом к силовому фильтрующему конденсатору. Если подключите балласт без диода — опять выйдут из строя ключи.
Если вас все устраивает, можете приступать к изготовлению платы, а затем — к сборке всей схемы. Перед сборкой убедитесь в правильности разводки платы и отсутствии дефектов в ней, а также — в наличии у вас всех указанных на схеме радиодеталей. Также не забудьте установить IGBT-транзисторы на массивный радиатор и изолировать их от него путем использования термопрокладок и изолирующих шайб.
После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
Обратите внимание, что реверс осуществляется через полную остановку двигателя, при попытке сменить направление вращения на работающем двигателе произойдет его мгновенная остановка, а силовые ключи сгорят от перегрузки. Если вам не жаль денег, которые придется потратить на замену мосфетов, то можете использовать эту особенность в качестве аварийного тормоза.
Возможные проблемы при проверке
Если при проверке частотника схема не заработала или заработала неправильно, значит, вы где-то допустили ошибку. Отключите частотник от сети и проверьте правильность установки компонентов, их исправность и отсутствие разрывов/замыканий дорожек там, где их быть не должно.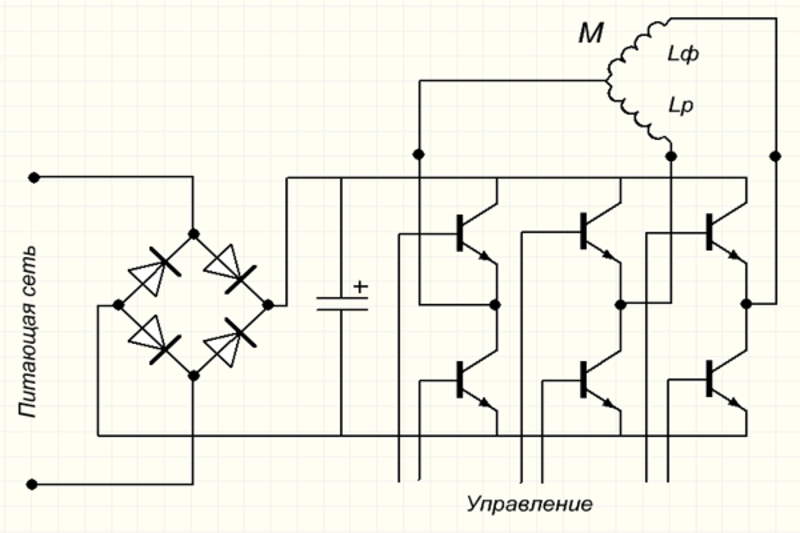 После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
Частотный преобразователь своими руками — RadioRadar
Электропитание
ГлавнаяРадиолюбителюЭлектропитание
5 лет назад
Частотный преобразователь применяется для того, чтобы из одной фазы получить три. Трехфазное питание используется, в основном, в промышленности. Однако и в бытовых ситуациях потребуется управление, например, трехфазным асинхронным двигателем. На этот случай вполне можно обойтись самостоятельным изготовлением частотника, что позволит использовать устройство с минимальными потерями мощности.
Существует много схем, которые дают возможность запустить трехфазный двигатель. Но, часть из них не предусматривает плавного включения или выключения, или же создают дополнительные неудобства, которые не дадут использовать двигатель полноценно.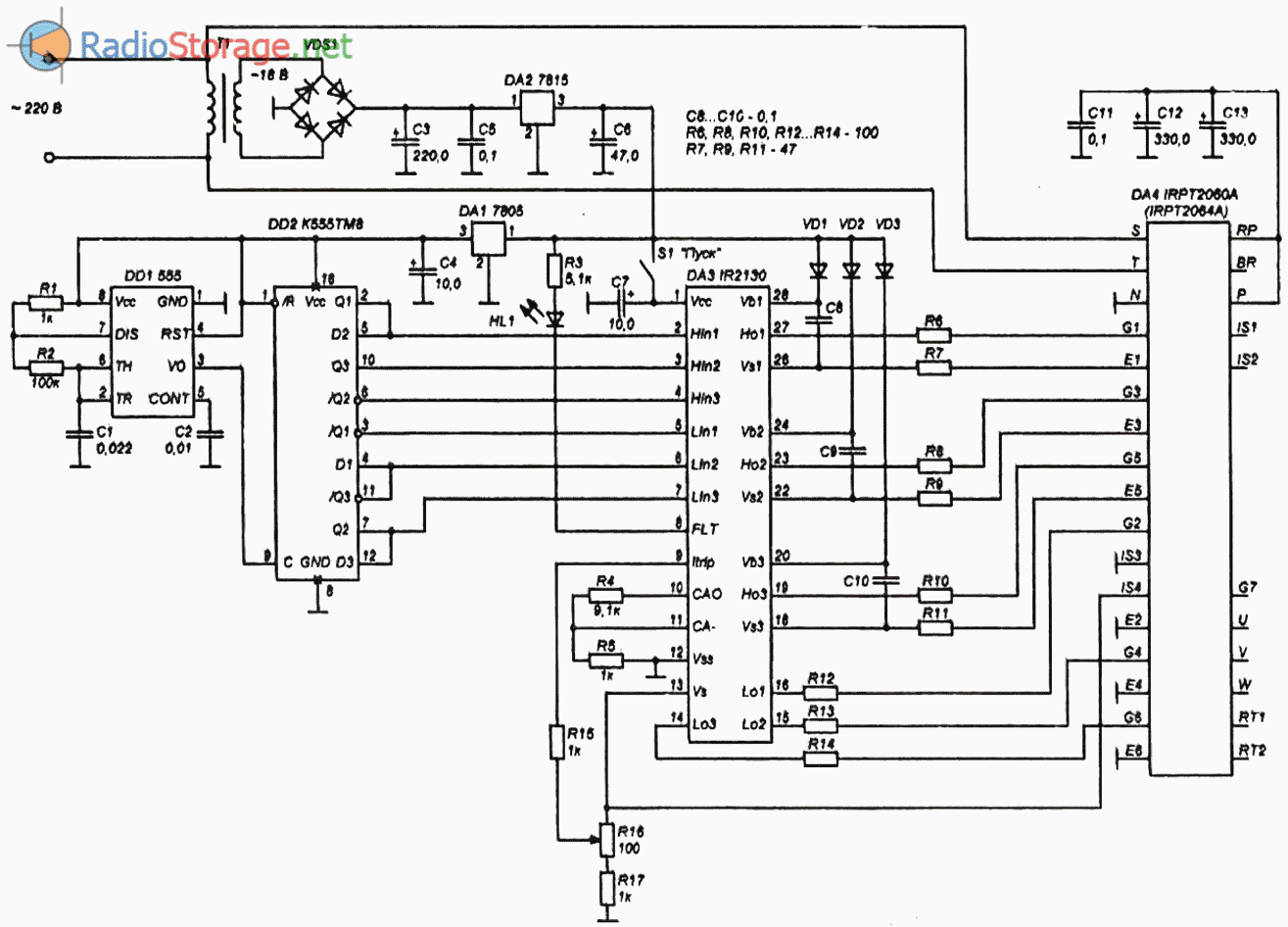 Исходя из этого, и были изобретены частотные преобразователи. Они позволяют полностью контролировать работу двигателя, при экономичном расходе электроэнергии и безопасности эксплуатации.
Исходя из этого, и были изобретены частотные преобразователи. Они позволяют полностью контролировать работу двигателя, при экономичном расходе электроэнергии и безопасности эксплуатации.
Рис. 1. Схема запуска трехфазного двигателя
Составляющие частотного преобразователя
Для наглядности, схему можно разбить на три составляющих или три взаимосвязанных блока:
1. Выпрямитель.
2. Фильтр, предназначение которого есть сглаживание напряжения на выходе.
3. Инвертор, который собственно и отвечает за производство необходимой частоты.
Его использование дает значительное уменьшение пускового тока, при включении оборудования, что существенно продлевает эксплуатационный срок двигателя и устройства, где данный двигатель используется. Естественно, что избавившись таким образом от высоких показаний пускового тока, удается и сэкономить электроэнергию, которая уходила ранее при запуске оборудования. А это особенно актуально в условиях, где предусмотрены частые запуски и остановки устройств.
Рис. 2. Составляющие частотного преобразователя
Современные покупные инверторы широко используются в таких сферах, как производство, водоснабжение, энергетика, сельское и городское хозяйства, в электронике, и в автоматических линиях и комплексах.
Стоимость фирменного частотного преобразователя слишком высока, для того, чтобы изучить его процессы работы или использовать в быту или домашней мастерской. Поэтому часто используются в таких ситуациях самодельные частотники.
Сборка устройства
Стоит обратить внимание на то, что в домашних условиях крайне не рекомендуется использование двигателей, рассчитанных на мощность большую, чем 1 кВт. Таковы особенности домашней сети.
Имея необходимый двигатель, потребуется для начала соединить его обмотки между собой способом «треугольник».
Рис. 3. Трёхфазный двигатель
Рис. 4. Соединение треугольник
Рис. 5. Соединение треугольник
Схема самого частотного преобразователя.
Рис. 6. Схема частотного преобразователя
Питание осуществляется от блока питания 27 Вольт постоянного напряжения. Это может быть, как регулируемый БП, так и сделанный собственноручно, рассчитанный на данное напряжение. Схема подключения двигателя;
Рис. 7. Схема подключения двигателя
Схема простая и проверенная и не содержит компонентов, которые сложно будет купить. Но, к сожалению, не лишена недостатков и годится для применения лишь в быту.
Более сложная в сборке схема, но и более результативная представлена ниже.
Рис. 8. Схема подключения двигателя
На данный момент это самая обсуждаемая схема частотного преобразователя, который можно сделать собственноручно. Прошивки микроконтроллера изобилуют на тематических форумах. Потребуется не только умение грамотно паять, но и прошивать микроконтроллеры.
Печатная плата.
Рис. 9. Печатная плата
Потребуется надежный источник питания на 24 Вольта. Предлагается его также изготовить собственноручно по схеме.
Предлагается его также изготовить собственноручно по схеме.
Рис. 10. Схема источника питания
Естественно, что устройство можно приобрести и готовым. Они бывают фирменными или сделанными народными мастерами, которые обладают положительными рекомендациями.
Автор: RadioRadar
Мнения читателей
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Что такое преобразователь частоты? Как это работает?
Работа с переменной частотой в форме генератора переменного тока существует с момента появления асинхронного двигателя. Измените скорость вращения генератора, и вы измените его выходную частоту. До появления высокоскоростных транзисторов это был один из немногих доступных вариантов изменения скорости двигателя, однако изменения частоты были ограничены, поскольку снижение скорости генератора снижало выходную частоту, но не напряжение. Чуть позже мы увидим, почему это важно. В нашей отрасли применение насосов с регулируемой скоростью в прошлом было намного сложнее, чем сегодня. Один из более простых методов заключался в использовании многополюсного двигателя, который был намотан таким образом, что позволял переключателю (или переключателям) изменять количество полюсов статора, которые были активны в любой момент времени. Скорость вращения можно было изменить вручную или с помощью датчика, подключенного к переключателям. Этот метод до сих пор используется во многих приложениях с насосами с переменным расходом. Примеры включают циркуляционные насосы горячей и охлажденной воды, насосы для бассейнов, вентиляторы и насосы градирен. В некоторых бытовых бустерных насосах использовался гидравлический привод или системы регулируемого ременного привода (своего рода автоматическая коробка передач) для изменения скорости насоса в зависимости от обратной связи от мембранного клапана давления. И некоторые другие были еще более сложными.
Один из более простых методов заключался в использовании многополюсного двигателя, который был намотан таким образом, что позволял переключателю (или переключателям) изменять количество полюсов статора, которые были активны в любой момент времени. Скорость вращения можно было изменить вручную или с помощью датчика, подключенного к переключателям. Этот метод до сих пор используется во многих приложениях с насосами с переменным расходом. Примеры включают циркуляционные насосы горячей и охлажденной воды, насосы для бассейнов, вентиляторы и насосы градирен. В некоторых бытовых бустерных насосах использовался гидравлический привод или системы регулируемого ременного привода (своего рода автоматическая коробка передач) для изменения скорости насоса в зависимости от обратной связи от мембранного клапана давления. И некоторые другие были еще более сложными. Основываясь на том, что нам приходилось преодолевать в прошлом, становится совершенно очевидным, почему появление современного преобразователя частоты произвело революцию (еще один каламбур) в насосной среде с регулируемой скоростью. Все, что вам нужно сделать сегодня, это установить относительно простую электронную коробку (которая часто заменяет более сложное пусковое оборудование) на месте применения, и вдруг вы сможете вручную или автоматически изменить скорость насоса по своему желанию.
Все, что вам нужно сделать сегодня, это установить относительно простую электронную коробку (которая часто заменяет более сложное пусковое оборудование) на месте применения, и вдруг вы сможете вручную или автоматически изменить скорость насоса по своему желанию.
Итак, давайте взглянем на компоненты преобразователя частоты и посмотрим, как они на самом деле работают вместе для изменения частоты и, следовательно, скорости двигателя. Я думаю, вы будете поражены простотой этого процесса. Все, что для этого потребовалось, — это доработка твердотельного устройства, которое мы знаем как транзистор.
Компоненты преобразователя частоты
Выпрямитель
Поскольку изменить частоту синусоиды переменного тока в режиме переменного тока сложно, первой задачей преобразователя частоты является преобразование волны в постоянный ток. Как вы увидите чуть позже, относительно легко манипулировать DC, чтобы он выглядел как AC. Первым компонентом всех преобразователей частоты является устройство, известное как выпрямитель или преобразователь, и оно показано слева на рисунке ниже.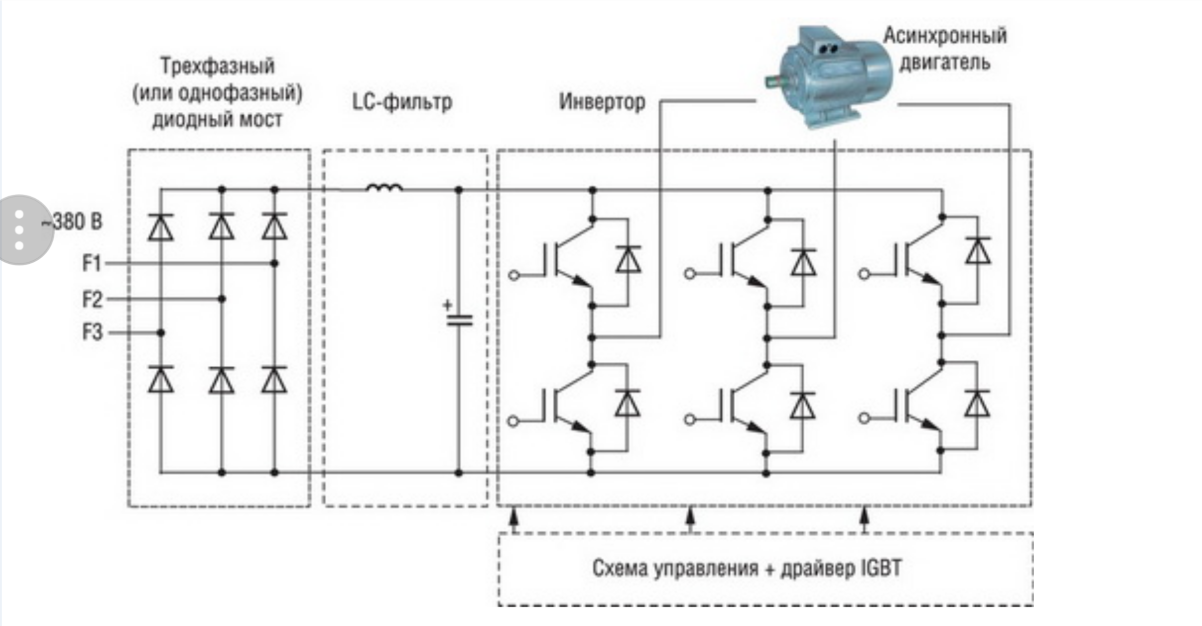
Схема выпрямителя преобразует переменный ток в постоянный и делает это почти так же, как в зарядном устройстве для аккумуляторов или дуговой сварке. Он использует диодный мост, чтобы ограничить движение синусоидальной волны переменного тока только в одном направлении. В результате получается полностью выпрямленная форма волны переменного тока, которая интерпретируется цепью постоянного тока как исходная форма волны постоянного тока. Трехфазные преобразователи частоты принимают три отдельных входных фазы переменного тока и преобразуют их в один выходной постоянный ток. Большинство трехфазных преобразователей частоты также могут потреблять однофазное питание (230 В или 460 В), но, поскольку есть только две входные ветви, выходная мощность преобразователя частоты (HP) должна быть снижена, поскольку пропорционально уменьшается производимый постоянный ток. С другой стороны, настоящие однофазные преобразователи частоты (те, которые управляют однофазными двигателями) используют однофазный вход и выдают выход постоянного тока, который пропорционален входу.
Есть две причины, по которым трехфазные двигатели более популярны, чем их однофазные аналоги, когда речь идет о работе с переменной скоростью. Во-первых, они предлагают гораздо более широкий диапазон мощностей. Но не менее важна их способность начинать вращение самостоятельно. С другой стороны, однофазный двигатель часто требует некоторого внешнего вмешательства, чтобы начать вращение. В этом случае мы ограничим наше обсуждение трехфазными двигателями, используемыми в трехфазных преобразователях частоты.
Шина постоянного тока
Второй компонент, известный как шина постоянного тока (показана в центре рисунка), не виден во всех преобразователях частоты, поскольку он не участвует непосредственно в работе с переменной частотой. Но он всегда будет присутствовать в высококачественных преобразователях частоты общего назначения (производимых специализированными производителями преобразователей частоты). Не вдаваясь в подробности, шина постоянного тока использует конденсаторы и индуктор для фильтрации «пульсаций» напряжения переменного тока из преобразованного постоянного тока, прежде чем он попадет в секцию инвертора.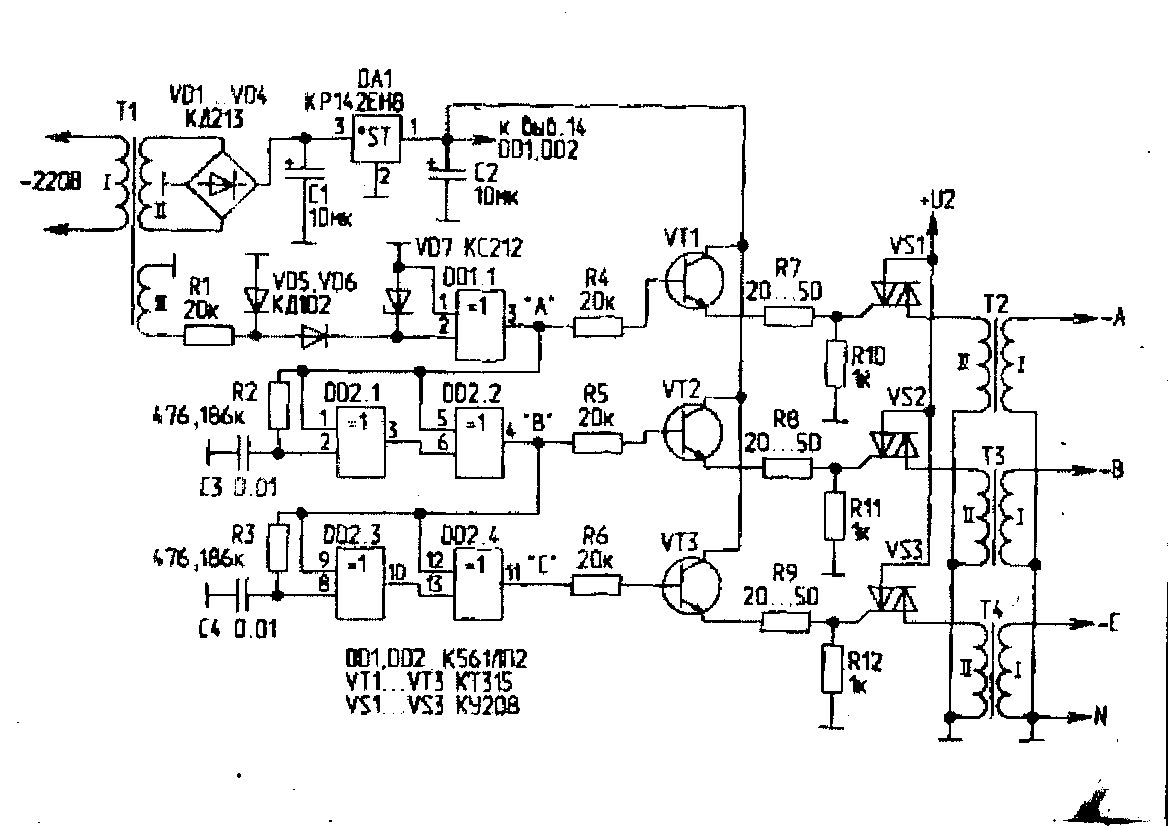
Инвертор
Справа от иллюстрации — «внутренности» преобразователя частоты. Инвертор использует три набора высокоскоростных переключающих транзисторов для создания «импульсов» постоянного тока, которые имитируют все три фазы синусоиды переменного тока. Эти импульсы определяют не только напряжение волны, но и ее частоту. Термин «инвертор» или «инверсия» означает «обращение» и просто относится к движению вверх и вниз генерируемой формы волны. В современном инверторе преобразователя частоты используется метод, известный как «широтно-импульсная модуляция» (ШИМ), для регулирования напряжения и частоты. Мы рассмотрим это более подробно, когда будем смотреть на выход инвертора.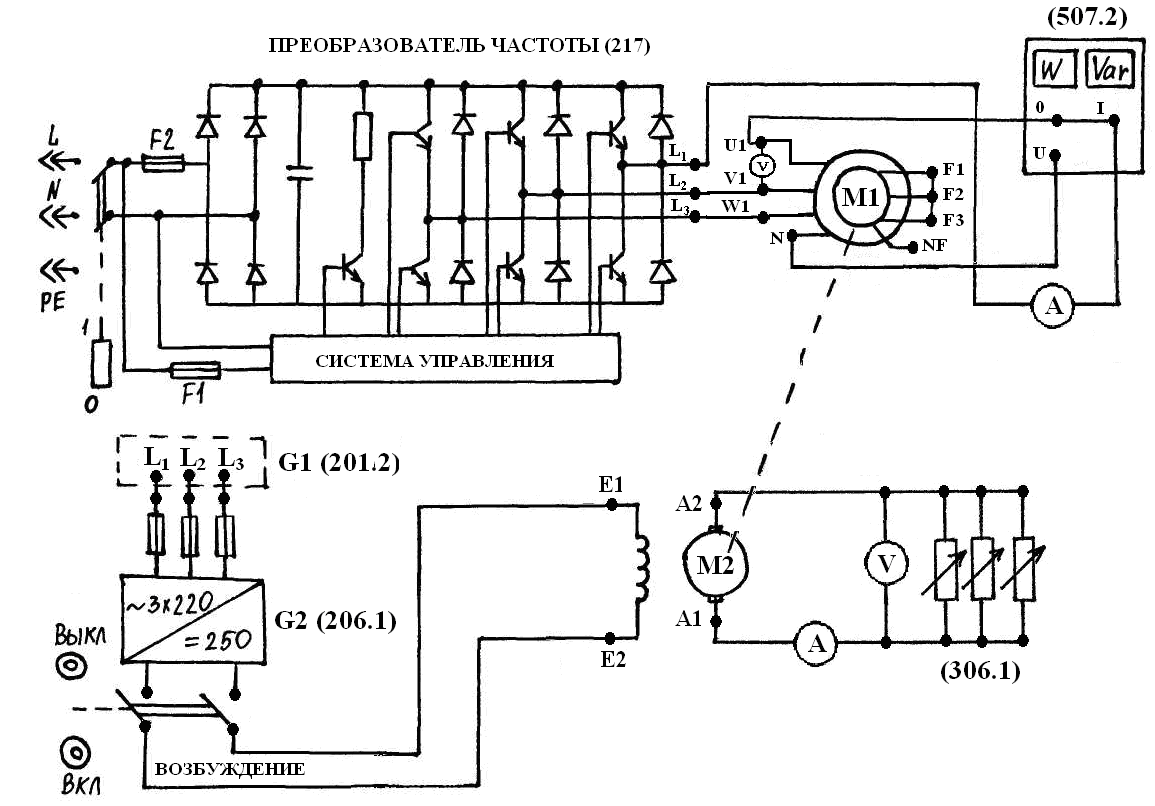
Другим термином, с которым вы, вероятно, сталкивались, читая литературу или рекламу преобразователей частоты, является «IGBT». IGBT относится к «изолированному затвору, биполярному транзистору», который является переключающим (или импульсным) компонентом инвертора. Транзистор (заменивший вакуумную лампу) в нашем электронном мире выполняет две функции. Он может действовать как усилитель и усиливать сигнал, как в радио или стереосистеме, или он может действовать как переключатель и просто включать и выключать сигнал. IGBT — это просто современная версия, которая обеспечивает более высокие скорости переключения (3000–16000 Гц) и меньшее тепловыделение. Более высокая скорость переключения приводит к повышению точности имитации волны переменного тока и уменьшению слышимого шума двигателя. Уменьшение выделяемого тепла означает меньший размер радиаторов и, следовательно, меньшую занимаемую площадь преобразователя частоты.
Выход инвертора
На рисунке справа показана форма волны, генерируемой инвертором ШИМ-преобразователя частоты, по сравнению с истинной синусоидой переменного тока.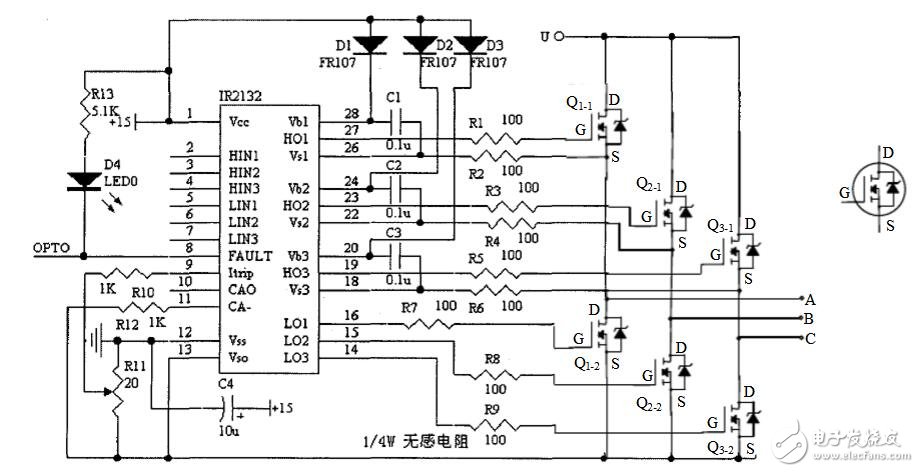 Выход инвертора состоит из серии прямоугольных импульсов фиксированной высоты и регулируемой ширины. В этом конкретном случае есть три набора импульсов — широкий набор в середине и узкий набор в начале и конце как положительной, так и отрицательной частей цикла переменного тока. Сумма площадей импульсов равна эффективному напряжению истинной волны переменного тока (мы обсудим эффективное напряжение через несколько минут). Если бы вы отсекли части импульсов выше (или ниже) истинной волны переменного тока и использовали их для заполнения пробелов под кривой, вы бы обнаружили, что они совпадают почти идеально. Именно таким образом преобразователь частоты регулирует напряжение, подаваемое на двигатель.
Выход инвертора состоит из серии прямоугольных импульсов фиксированной высоты и регулируемой ширины. В этом конкретном случае есть три набора импульсов — широкий набор в середине и узкий набор в начале и конце как положительной, так и отрицательной частей цикла переменного тока. Сумма площадей импульсов равна эффективному напряжению истинной волны переменного тока (мы обсудим эффективное напряжение через несколько минут). Если бы вы отсекли части импульсов выше (или ниже) истинной волны переменного тока и использовали их для заполнения пробелов под кривой, вы бы обнаружили, что они совпадают почти идеально. Именно таким образом преобразователь частоты регулирует напряжение, подаваемое на двигатель.
Сумма ширины импульсов и пустых промежутков между ними определяет частоту волны (отсюда ШИМ или широтно-импульсная модуляция), воспринимаемой двигателем. Если бы импульс был непрерывным (то есть без пробелов), частота все равно была бы правильной, но напряжение было бы намного больше, чем у истинной синусоидальной волны переменного тока.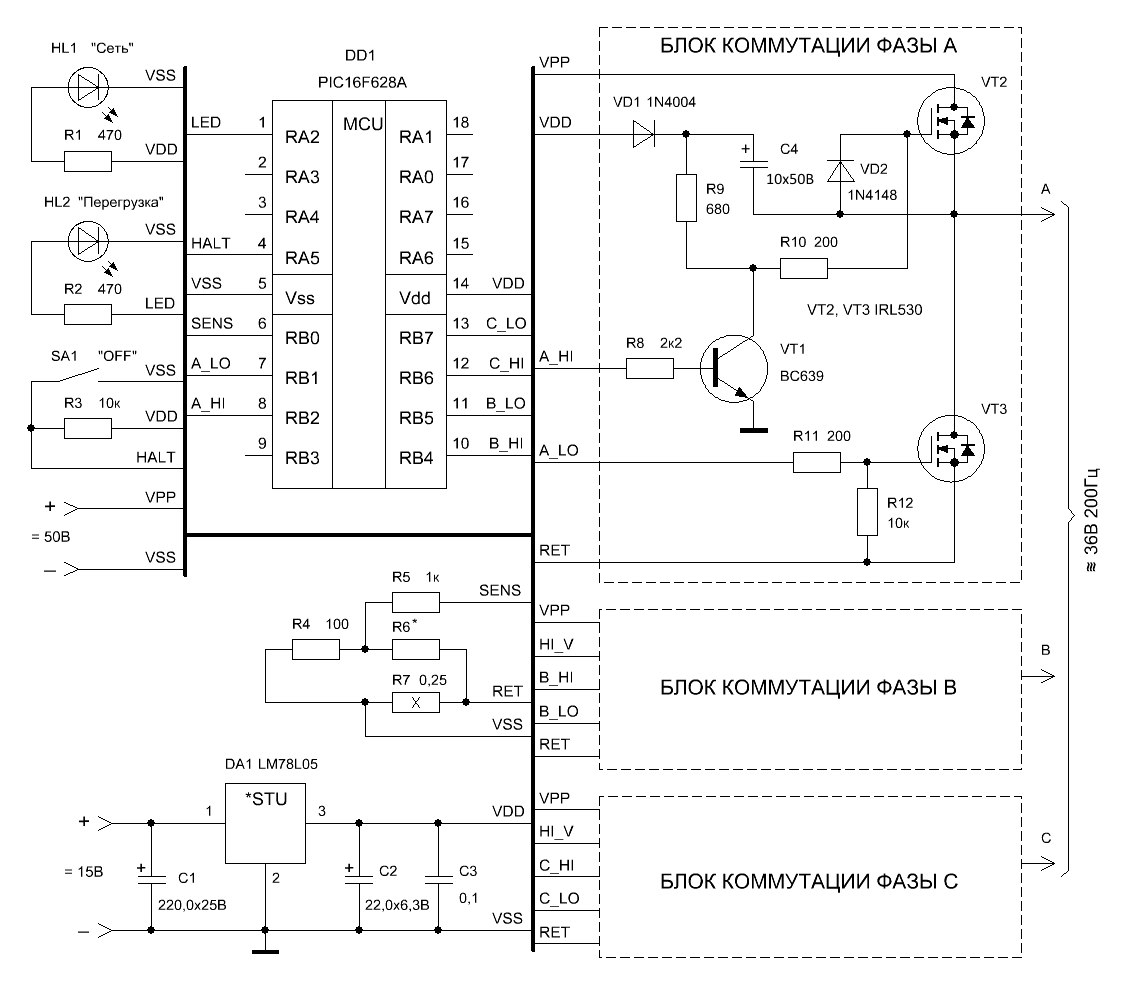 В зависимости от желаемого напряжения и частоты преобразователь частоты будет изменять высоту и ширину импульса, а также ширину пустых промежутков между ними. Несмотря на то, что внутренности, обеспечивающие это, относительно сложны, результат получается элегантно простым!
В зависимости от желаемого напряжения и частоты преобразователь частоты будет изменять высоту и ширину импульса, а также ширину пустых промежутков между ними. Несмотря на то, что внутренности, обеспечивающие это, относительно сложны, результат получается элегантно простым!
Некоторые из вас, вероятно, задаются вопросом, как этот «фальшивый» переменный ток (на самом деле постоянный) может управлять асинхронным двигателем переменного тока. В конце концов, разве не требуется переменный ток, чтобы «индуцировать» ток и соответствующее ему магнитное поле в роторе двигателя? Что ж, переменный ток естественным образом вызывает индукцию, потому что он постоянно меняет направление. С другой стороны, постоянный ток не работает, потому что обычно он неподвижен после активации цепи. Но постоянный ток может индуцировать ток, если он включается и выключается. Для тех из вас, кто достаточно взрослый, чтобы помнить, автомобильные системы зажигания (до появления твердотельного зажигания) имели набор точек в распределителе. Назначение очков состояло в том, чтобы «импульсно» подавать питание от батареи в катушку (трансформатор). Это вызвало заряд в катушке, который затем увеличил напряжение до уровня, который позволил бы свечам зажигания загореться. Широкие импульсы постоянного тока, показанные на предыдущей иллюстрации, на самом деле состоят из сотен отдельных импульсов, и именно это движение включения и выключения выхода инвертора позволяет происходить индукции через постоянный ток.
Назначение очков состояло в том, чтобы «импульсно» подавать питание от батареи в катушку (трансформатор). Это вызвало заряд в катушке, который затем увеличил напряжение до уровня, который позволил бы свечам зажигания загореться. Широкие импульсы постоянного тока, показанные на предыдущей иллюстрации, на самом деле состоят из сотен отдельных импульсов, и именно это движение включения и выключения выхода инвертора позволяет происходить индукции через постоянный ток.
Действующее напряжение
Мощность переменного тока — довольно сложная величина, и неудивительно, что Эдисон почти выиграл битву за то, чтобы сделать постоянный ток стандартом в США. К счастью для нас, все его сложности были объяснены, и все, что нам нужно сделать, это следовать правилам, которые изложили до нас.
Одним из атрибутов, которые делают переменный ток сложным, является то, что он непрерывно изменяет напряжение, переходя от нуля к некоторому максимальному положительному напряжению, затем обратно к нулю, затем к некоторому максимальному отрицательному напряжению, а затем снова к нулю.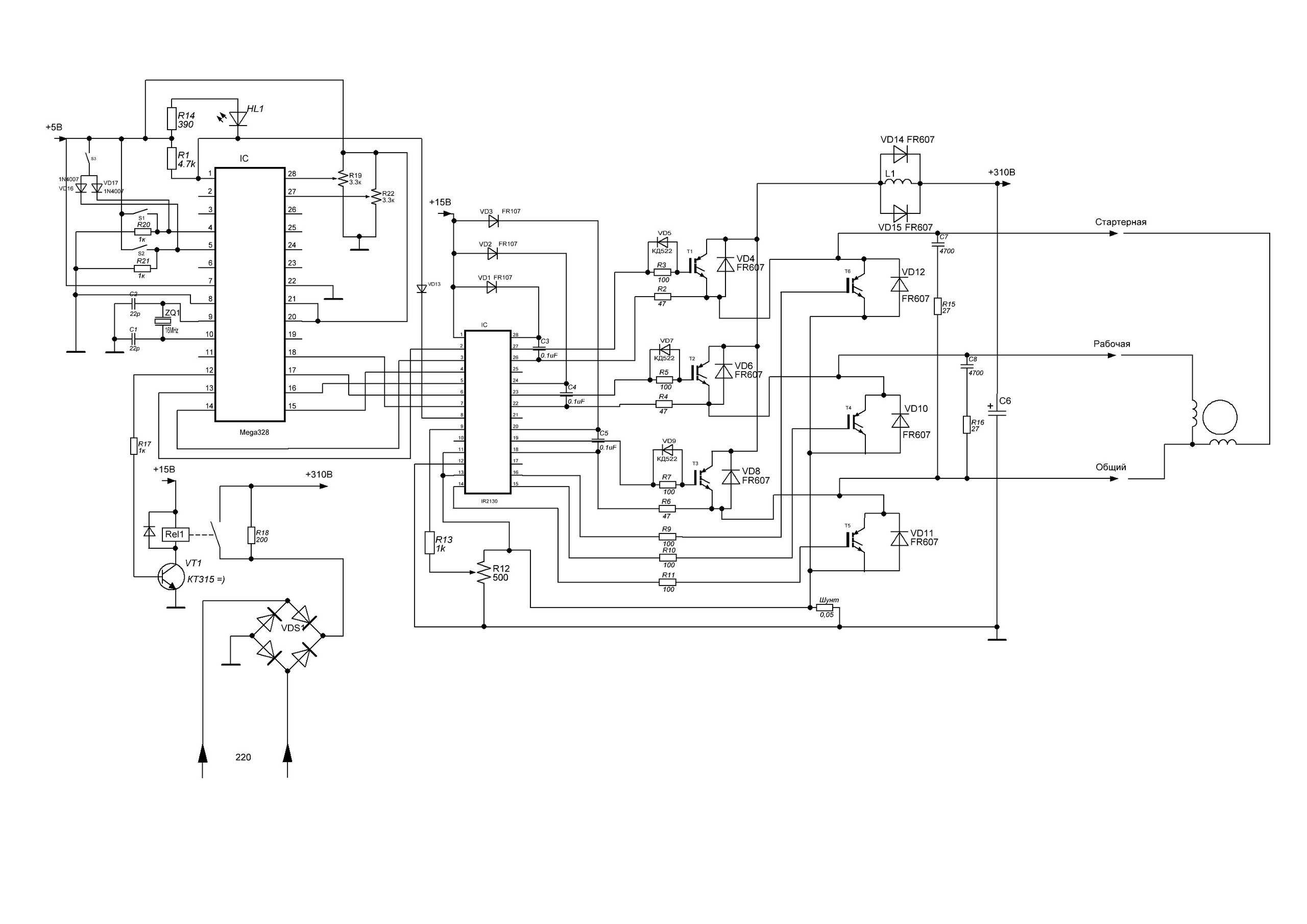 Как определить фактическое напряжение, приложенное к цепи? На рисунке слева показана синусоида 60 Гц, 120 В. Обратите внимание, однако, что его пиковое напряжение составляет 170 В. Как мы можем назвать это волной 120 В, если ее фактическое напряжение составляет 170 В? В течение одного цикла оно начинается с 0 В и поднимается до 170 В, затем снова падает до 0. Продолжает падать до -170 и снова поднимается до 0. Получается, что площадь зеленого прямоугольника, верхняя граница которого находится на уровне 120 В, равна к сумме площадей под положительной и отрицательной частями кривой. Может ли 120В быть средним? Что ж, если бы вы усреднили все значения напряжения в каждой точке цикла, результат был бы примерно 108 В, так что это не должно быть ответом. Почему же тогда значение, измеренное ВОМ, составляет 120 В? Это связано с тем, что мы называем «эффективным напряжением».
Как определить фактическое напряжение, приложенное к цепи? На рисунке слева показана синусоида 60 Гц, 120 В. Обратите внимание, однако, что его пиковое напряжение составляет 170 В. Как мы можем назвать это волной 120 В, если ее фактическое напряжение составляет 170 В? В течение одного цикла оно начинается с 0 В и поднимается до 170 В, затем снова падает до 0. Продолжает падать до -170 и снова поднимается до 0. Получается, что площадь зеленого прямоугольника, верхняя граница которого находится на уровне 120 В, равна к сумме площадей под положительной и отрицательной частями кривой. Может ли 120В быть средним? Что ж, если бы вы усреднили все значения напряжения в каждой точке цикла, результат был бы примерно 108 В, так что это не должно быть ответом. Почему же тогда значение, измеренное ВОМ, составляет 120 В? Это связано с тем, что мы называем «эффективным напряжением».
Если бы вам нужно было измерить тепло, выделяемое постоянным током, протекающим через сопротивление, вы бы обнаружили, что оно больше, чем тепло, выделяемое эквивалентным переменным током.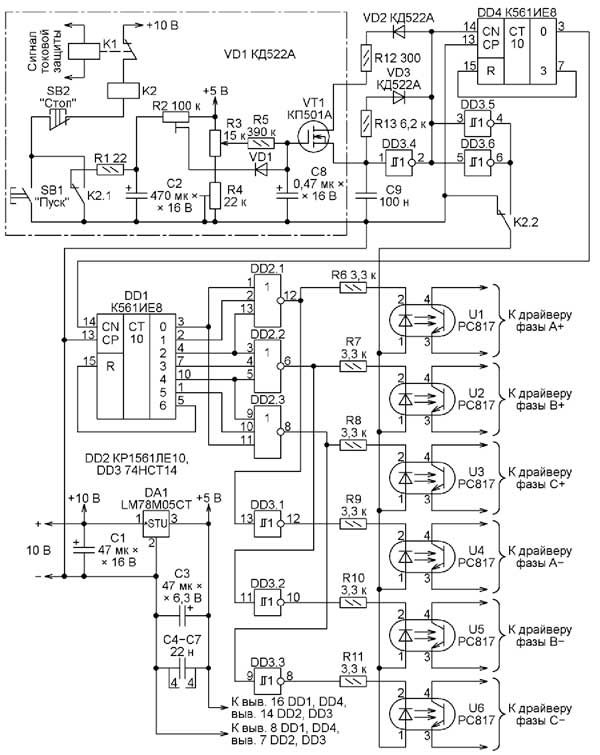 Это связано с тем, что переменный ток не поддерживает постоянное значение на протяжении всего своего цикла. Если вы сделаете это в лаборатории в контролируемых условиях и обнаружите, что конкретный постоянный ток вызывает повышение температуры на 100 градусов, его переменный эквивалент даст повышение на 70,7 градуса или всего 70,7% от значения постоянного тока. Следовательно, действующее значение переменного тока составляет 70,7% от значения постоянного тока. Также оказывается, что действующее значение напряжения переменного тока равно квадратному корню из суммы квадратов напряжения на первой половине кривой. Если пиковое напряжение равно 1, и вы измеряете каждое из отдельных напряжений от 0 до 180°, эффективное напряжение будет составлять 0,707 от пикового напряжения. 0,707-кратное пиковое напряжение 170, показанное на иллюстрации, равно 120 В. Это эффективное напряжение также известно как среднеквадратичное или среднеквадратичное напряжение. Отсюда следует, что пиковое напряжение всегда будет в 1,414 раза больше эффективного напряжения.
Это связано с тем, что переменный ток не поддерживает постоянное значение на протяжении всего своего цикла. Если вы сделаете это в лаборатории в контролируемых условиях и обнаружите, что конкретный постоянный ток вызывает повышение температуры на 100 градусов, его переменный эквивалент даст повышение на 70,7 градуса или всего 70,7% от значения постоянного тока. Следовательно, действующее значение переменного тока составляет 70,7% от значения постоянного тока. Также оказывается, что действующее значение напряжения переменного тока равно квадратному корню из суммы квадратов напряжения на первой половине кривой. Если пиковое напряжение равно 1, и вы измеряете каждое из отдельных напряжений от 0 до 180°, эффективное напряжение будет составлять 0,707 от пикового напряжения. 0,707-кратное пиковое напряжение 170, показанное на иллюстрации, равно 120 В. Это эффективное напряжение также известно как среднеквадратичное или среднеквадратичное напряжение. Отсюда следует, что пиковое напряжение всегда будет в 1,414 раза больше эффективного напряжения. Ток 230 В переменного тока имеет пиковое напряжение 325 В, а 460 В имеет пиковое напряжение 650 В. Чуть позже мы увидим влияние пикового напряжения.
Ток 230 В переменного тока имеет пиковое напряжение 325 В, а 460 В имеет пиковое напряжение 650 В. Чуть позже мы увидим влияние пикового напряжения.
Что ж, возможно, я говорил об этом дольше, чем необходимо, но я хотел, чтобы вы получили представление об действующем напряжении, чтобы вы могли понять приведенную ниже иллюстрацию. В дополнение к изменению частоты преобразователь частоты также должен изменять напряжение, даже если оно не имеет ничего общего со скоростью, с которой работает двигатель переменного тока.
На рисунке показаны две синусоидальные волны переменного тока 460 В. Красный — это кривая 60 Гц, а синий — 50 Гц. Оба имеют пиковое напряжение 650 В, но 50 Гц намного шире. Вы можете легко увидеть, что площадь под первой половиной (0–10 мс) кривой 50 Гц больше, чем площадь первой половины (0–8,3 мс) кривой 60 Гц. А поскольку площадь под кривой пропорциональна эффективному напряжению, ее эффективное напряжение выше. Это увеличение эффективного напряжения становится еще более значительным по мере уменьшения частоты. Если бы двигатель на 460 В мог работать при таких более высоких напряжениях, его срок службы мог бы существенно сократиться. Поэтому преобразователь частоты должен постоянно изменять «пиковое» напряжение по отношению к частоте, чтобы поддерживать постоянное действующее напряжение. Чем ниже рабочая частота, тем ниже пиковое напряжение и наоборот. Именно по этой причине двигатели с частотой 50 Гц, используемые в Европе и некоторых частях Канады, рассчитаны на 380 В. Видите ли, я говорил вам, что AC может быть немного сложным!
Если бы двигатель на 460 В мог работать при таких более высоких напряжениях, его срок службы мог бы существенно сократиться. Поэтому преобразователь частоты должен постоянно изменять «пиковое» напряжение по отношению к частоте, чтобы поддерживать постоянное действующее напряжение. Чем ниже рабочая частота, тем ниже пиковое напряжение и наоборот. Именно по этой причине двигатели с частотой 50 Гц, используемые в Европе и некоторых частях Канады, рассчитаны на 380 В. Видите ли, я говорил вам, что AC может быть немного сложным!
Теперь у вас должно быть достаточно хорошее представление о работе преобразователя частоты и о том, как он управляет скоростью двигателя. Большинство преобразователей частоты предлагают пользователю возможность устанавливать скорость двигателя вручную с помощью многопозиционного переключателя или клавиатуры или использовать датчики (давление, расход, температура, уровень и т. д.) для автоматизации процесса.
Как сделать 3-фазную схему ЧРП
Представленная 3-фазная схема ЧРП (, разработанная мной ) может использоваться для управления скоростью любого трехфазного коллекторного двигателя переменного тока или даже бесщеточного двигателя переменного тока. Идею предложил г-н Том
Идею предложил г-н Том
Использование частотно-регулируемого привода
Предложенная схема трехфазного частотно-регулируемого привода может универсально применяться для большинства трехфазных двигателей переменного тока, где эффективность регулирования не слишком критична.
Его можно специально использовать для управления скоростью асинхронного двигателя с короткозамкнутым ротором в режиме разомкнутого контура и, возможно, в режиме замкнутого контура, который будет обсуждаться в следующей части статьи.
Модули, необходимые для 3-фазного инвертора
Для разработки предлагаемой схемы 3-фазного ЧРП или частотно-регулируемого привода необходимы следующие основные этапы схемы:
- Цепь ШИМ-регулятора напряжения
- 3-фазная цепь высокого/низкого напряжения H-моста
- 3-фазная схема генератора
- Цепь преобразователя напряжения в частоту для формирования параметра В/Гц.
Давайте изучим детали функционирования вышеперечисленных ступеней с помощью следующего пояснения:
Простая схема ШИМ-контроллера напряжения показана на схеме, приведенной ниже:
ШИМ-контроллер
Я уже включил и объяснил функционирование вышеупомянутого каскада генератора ШИМ, который в основном предназначен для генерации переменного выходного сигнала ШИМ на выводе 3 IC2 в ответ на потенциал, приложенный к выводу 5 той же ИС.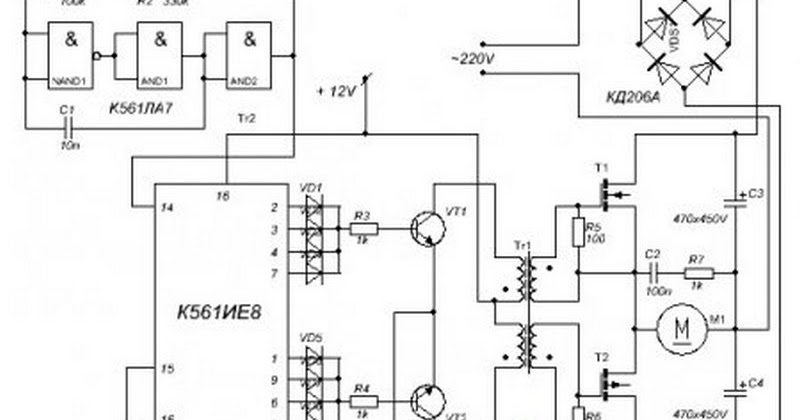
Предустановка 1K, показанная на схеме, представляет собой ручку управления среднеквадратичным значением, которую можно соответствующим образом отрегулировать для получения требуемой пропорциональной величины выходного напряжения в форме ШИМ на выводе 3 IC2 для дальнейшей обработки. Это настроено для получения соответствующего выходного сигнала, который может быть эквивалентен сети 220 В или 120 В переменного тока RMS.
Схема драйвера Н-моста
На следующей диаграмме ниже показана схема драйвера трехфазного Н-моста с одной микросхемой, использующая микросхему IRS2330.
Конструкция выглядит просто, так как большая часть сложностей решается встроенными сложными схемами чипов.
Хорошо рассчитанный 3-фазный сигнал подается на входы HIN1/2/3 и LIN1/2/3 микросхемы через каскад генератора 3-фазного сигнала.
Выходы микросхемы IRS2330 интегрированы с 6 полевыми МОП-транзисторами или мостовой сетью IGBT, стоки которых соответствующим образом сконфигурированы с двигателем, которым необходимо управлять.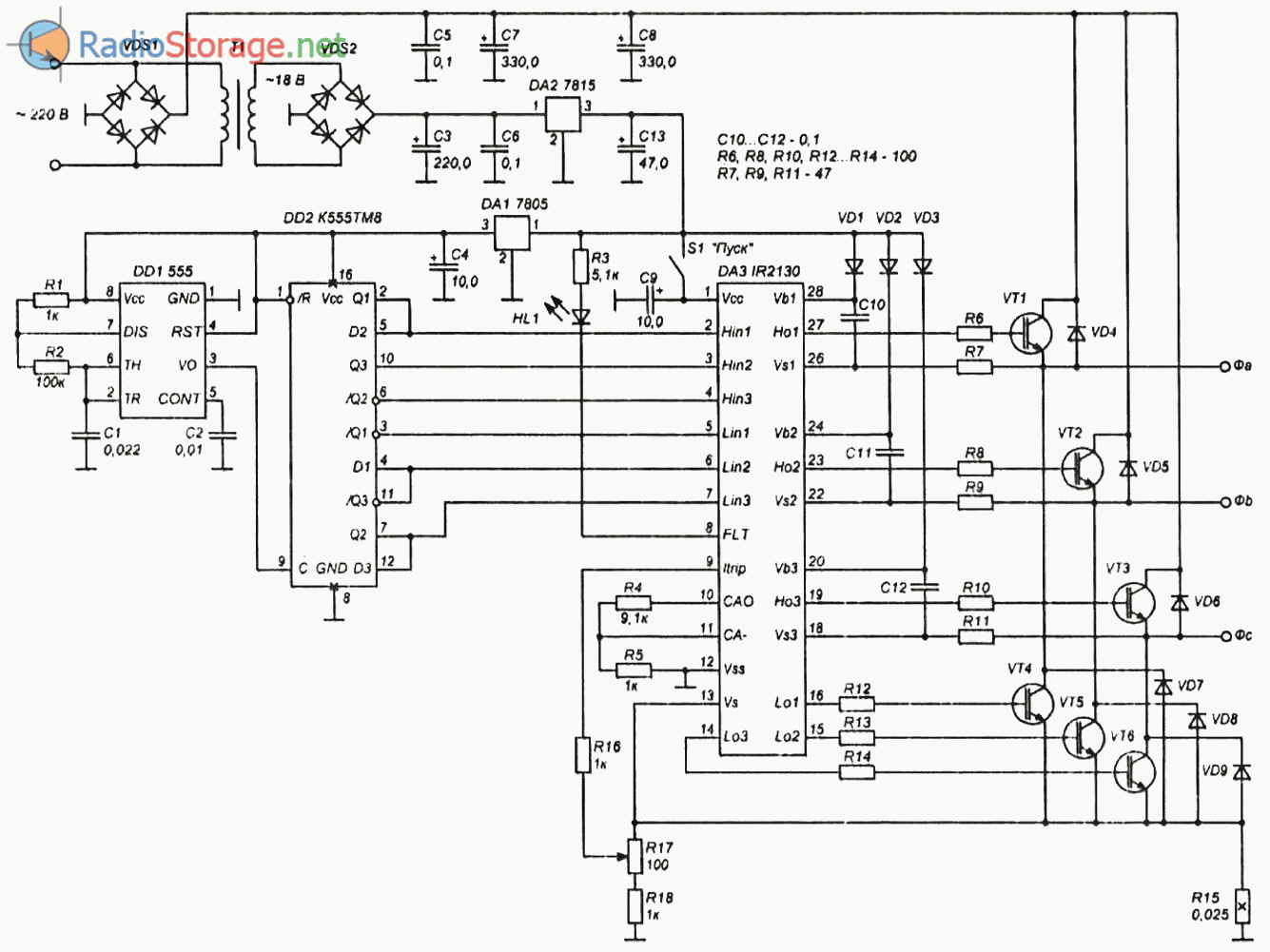
Затворы MOSFET/IGBT нижней стороны объединены с выводом №3 IC2 обсуждавшегося выше каскада схемы генератора ШИМ для инициирования инжекции ШИМ в мостовой каскад MOSFET. Это регулирование в конечном итоге помогает двигателю набрать желаемую скорость в соответствии с настройками (с помощью предустановки 1 k на первой диаграмме).
На следующей диаграмме мы визуализируем требуемую схему 3-фазного генератора сигналов.
Настройка схемы 3-фазного генератора
3-фазный генератор построен на паре КМОП-чипов CD4035 и CD4009, которые генерируют 3-фазные сигналы с точными размерами на показанных выводах.
Частота трехфазных сигналов зависит от подаваемых на вход тактовых импульсов, которые должны в 6 раз превышать предполагаемый трехфазный сигнал. Это означает, что если требуемая 3-фазная частота составляет 50 Гц, входная тактовая частота должна быть 50 x 6 = 300 Гц.
Это также означает, что вышеуказанные часы могут быть изменены для изменения эффективной частоты драйвера IC, которая, в свою очередь, будет отвечать за изменение рабочей частоты двигателя.
Однако, поскольку вышеуказанное изменение частоты должно быть автоматическим в ответ на изменение напряжения, становится необходимым преобразователь напряжения в частоту. На следующем этапе обсуждается простая схема точного преобразователя напряжения в частоту для требуемой реализации.
Как создать постоянное отношение V/F
Как правило, в асинхронных двигателях для поддержания оптимальной эффективности скорости двигателя и крутящего момента необходимо контролировать скорость скольжения или скорость вращения ротора, что, в свою очередь, становится возможным при поддержании постоянного соотношения В/Гц. Поскольку магнитный поток статора всегда постоянен независимо от входной частоты питания, скорость вращения ротора становится легко управляемой за счет поддержания постоянного отношения В/Гц.
В режиме разомкнутого контура это можно сделать приблизительно, поддерживая заданные отношения В/Гц и реализуя их вручную. Например, на первой диаграмме это можно сделать, соответствующим образом отрегулировав R1 и пресет 1K. R1 определяет частоту, а 1K регулирует среднеквадратичное значение выходного сигнала, поэтому, соответствующим образом настроив два параметра, мы можем вручную установить требуемое количество В/Гц.
R1 определяет частоту, а 1K регулирует среднеквадратичное значение выходного сигнала, поэтому, соответствующим образом настроив два параметра, мы можем вручную установить требуемое количество В/Гц.
Однако, чтобы получить относительно точное управление крутящим моментом и скоростью асинхронного двигателя, мы должны реализовать стратегию замкнутого контура, в которой данные о скорости скольжения необходимо подавать в схему обработки для автоматической регулировки соотношения В/Гц, чтобы что это значение всегда остается близким к постоянному.
Реализация обратной связи с замкнутым контуром
Первую диаграмму на этой странице можно соответствующим образом изменить для проектирования автоматического регулирования В/Гц с замкнутым контуром, как показано ниже:
На приведенном выше рисунке потенциал на выводе № 5 микросхемы 2 определяет ширину ШИМ, генерируемого на выводе № 3 той же микросхемы. SPWM генерируются путем сравнения выборки пульсаций сети 12 В на выводе № 5 с треугольной волной на выводе № 7 IC2, и они подаются на МОП-транзисторы на стороне низкого напряжения для управления двигателем.
Первоначально этот SPWM устанавливается на некоторый отрегулированный уровень (с использованием 1K perset), который запускает затворы IGBT нижней стороны трехфазного моста для запуска движения ротора на заданном уровне номинальной скорости.
Как только ротор ротора начинает вращаться, присоединенный тахометр с механизмом ротора вызывает пропорциональное увеличение напряжения на выводе № 5 IC2, что пропорционально приводит к расширению ШИМ, вызывая большее напряжение на катушках статора мотор. Это приводит к дальнейшему увеличению скорости вращения ротора, вызывая повышение напряжения на выводе № 5 IC2, и это продолжается до тех пор, пока эквивалентное напряжение SPWM больше не может увеличиваться, и синхронизация ротора статора не достигает устойчивого состояния.
Вышеупомянутая процедура саморегулируется в течение всего периода эксплуатации двигателя.
Как сделать и интегрировать тахометр
На следующей схеме показана простая конструкция тахометра, которую можно интегрировать с роторным механизмом, чтобы частота вращения могла питать основание BC547.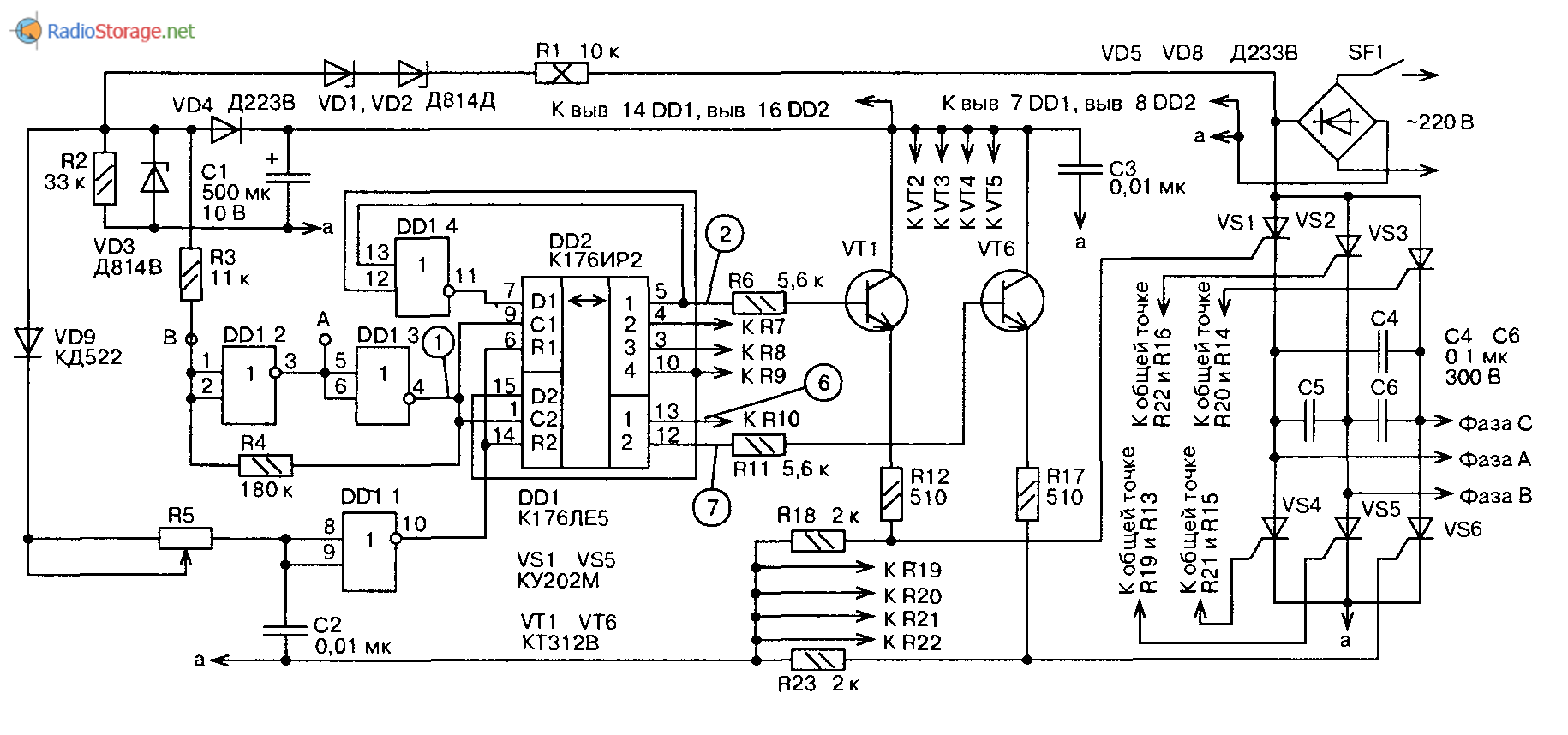
Здесь данные о скорости вращения ротора собираются с датчика Холла или сети ИК-светодиодов/датчиков и передаются на базу T1.
T1 колеблется на этой частоте и активирует схему тахометра, выполненную путем соответствующей настройки моностабильной схемы IC 555.
Выходной сигнал вышеуказанного тахометра изменяется пропорционально входной частоте на базе T1.
По мере увеличения частоты напряжение на крайнем правом выходе D3 также растет, и наоборот, что помогает поддерживать отношение В/Гц на относительно постоянном уровне.
Как управлять скоростью
Скорость двигателя при постоянном V/F может быть достигнута путем изменения входной частоты на тактовом входе IC 4035. Этого можно добиться путем подачи переменной частоты от нестабильной схемы IC 555 или любой другой стандартная нестабильная схема на тактовый вход IC 4035.
Изменение частоты эффективно изменяет рабочую частоту двигателя, что соответственно снижает скорость скольжения.
Это определяется тахометром, и тахометр пропорционально уменьшает потенциал на выводе № 5 микросхемы IC2, что, в свою очередь, пропорционально снижает содержание SPWM в двигателе, и, следовательно, напряжение двигателя снижается, обеспечивая изменение скорости двигателя с правильное требуемое отношение V/F.
Самодельный V/F-конвертер
В приведенной выше схеме преобразователя напряжения в частоту используется микросхема IC 4060, и на ее частотно-зависимое сопротивление влияет сборка светодиодов/резонаторов для необходимых преобразований.
Узел LED/LDR запечатан внутри светонепроницаемой коробки, а LDR расположен на частотно-зависимом резисторе 1M микросхемы.
Поскольку характеристика LDR/LDR достаточно линейна, изменяющаяся освещенность светодиода на LDR генерирует пропорционально изменяющуюся (увеличивающуюся или уменьшающуюся) частоту на контакте 3 микросхемы.
FSD или диапазон В/Гц каскада можно установить, установив соответствующим образом резистор 1 МОм или даже значение C1.
Светодиод получает напряжение и загорается через ШИМ от первого каскада схемы ШИМ. Это означает, что по мере изменения ШИМ освещение светодиода также будет меняться, что, в свою очередь, приведет к пропорциональному увеличению или уменьшению частоты на выводе 3 IC 4060 на приведенной выше диаграмме.
Интеграция преобразователя с частотно-регулируемым приводом
Эта переменная частота от IC 4060 теперь просто должна быть интегрирована с тактовым входом 3-фазного генератора IC CD4035.
Вышеуказанные этапы являются основными составляющими для создания 3-фазной схемы частотно-регулируемого привода.
Теперь важно обсудить шину постоянного тока, необходимую для питания контроллеров двигателей с БТИЗ, и процедуры настройки всей конструкции.
ШИНА постоянного тока, подключенная к шинам H-моста IGBT, может быть получена путем выпрямления доступного трехфазного сетевого входа с использованием следующей конфигурации схемы. Рельсы IGBT DC BUS подключаются к точкам, обозначенным как «нагрузка»
Для однофазного источника выпрямление может быть реализовано с использованием стандартной конфигурации сети с 4 диодными мостами.
Как настроить предлагаемую трехфазную схему частотно-регулируемого привода Это можно сделать в соответствии со следующими инструкциями: напряжение на шинах становится равным предполагаемому напряжению двигателя.