
Частотное регулирование насосов и асинхронных двигателей | ENARGYS.RU
Система частотного регулирования состоит из основного и вспомогательного оборудования преобразовательного звена технических и программных средств, которые служат для выполнения действий по частотному регулированию в технологической инженерной системе или ее отдельных частях.
В состав системы входят:
- Устройства верхнего уровня АСУ ТП, роль которых выполняют промышленные и панельные компьютеры, а также устройства связи обслуживающего персонала с программно-техническим комплексом СЧР.
- Устройства нижнего уровня: контроллеры, интеллектуальные реле, устройства связи с управляемым объектом, датчики параметров и т. д.
- Устройства и линии связи предназначенные для передачи информации между элементами СЧР.
- Дополнительное оборудование: шкафы для размещения элементов (ПТК) программно- техническим комплексом, кроссовые шкафы, устройства связи с подсистемами автоматического управления.
- Устройства, обеспечивающие электропитание ПТК СЧР.
- Программное обеспечение АСУ ТП
Кроме преобразователей частоты, являющихся основным оборудованием для частотного регулирования, в число оборудования можно включить:
- Силовые трансформаторы, предназначенные для согласования параметров напряжения источника питания, преобразователя и электродвигателя.
- Фильтры, установленные на входе и выходе преобразователя частоты.
- Силовые высоковольтные и коммутационные и защитные аппараты силовых цепей СЧР, высокого и низкого напряжения.
Станции частотного регулирования
СЧР являются основным оборудованием, предназначенным для автоматической работы насосных агрегатов, включенных в магистраль по обеспечению потребителей горячей и холодной водой, а также для отопления.
Рис №1. Блок-модуль, комплексная станция частотного регулирования
Использование станции способствует экономии электроэнергии и понижению затрат на эксплуатацию
Настройка станции приводит к поддержанию параметров работы в автоматическом режиме, разрешает плавный пуск двигателя, служит для защиты оборудования, перевод питания в автоматическом режиме на питание от резервного источника.
Частотное регулирование скорости асинхронного электродвигателя
Частотное регулирование электроприводов повышает надежность работы оборудования и систем, автоматизирует производство, позволяет экономить электрическую энергию и ресурсы. Частотное регулирование насосов производимое, при использовании инвертора обеспечивает плавный пуск двигателя, увеличивает эксплуатационное время работы электропривода и трубопроводов, предотвращает гидроудары, помогает поддерживать напор в трубах на должном уровне.
Принцип частотного регулирования асинхронного двигателя или синхронной машины, основан на применении преобразователя частоты. Присутствие инвертора позволяет регулировать скорость вращения вала электропривода плавно и бесступенчато, электронным способом. Достигается при помощи изменения частоты питающего напряжения, в этом случае изменяется угловая скорость магнитного поля статора.
Рис №2. Схема частотного регулирования электропривода
Применение скважинных насосов с частотным регулированием, способствует хорошей эксплуатационной способности устройства за счет повышения жизненного цикла насоса, происходит это при замене задвижкой, используемой при подаче на частотный преобразователь для регулирования частоты вращения.
Использование насосов с частотным регулированием снижает энергопотребление на 10 – 60%, что способствует эффективному энергосбережению.
Рис № 3. Работа насосов с частотным регулированием на сеть с преобладанием статической составляющей
Применение частотного привода для скважинных насосов имеет несколько существенных недостатков,их надо принимать во внимание при выборе систем регулирования.
- Возможен перегрев двигателя при снижении быстрого обтекания электродвигателя, нужно иметь сведения по снижению подачи при понижении скорости вращения, это требует использование кожуха охлаждения или диктует целесообразность использования двигателя большей мощности.
- Подшипники скольжения, которые используются на скважинных насосах, при понижении скорости вращения вала, приводит к быстрому износу подшипников. Для более надежной работы подшипников требуется ограничить частоту вращения.
Частотное регулирование оптимально при использовании в системах с динамической составляющей.
Законы частотного регулирования
Регулирование скорости асинхронной машины происходит при управлении по частотной зависимости подаваемого напряжения. в этом случае отношение напряжения и частоты,
U = ƒ(ƒ)
U / (ƒ) = const
При уменьшении частоты происходит снижение скорости вращения двигателя, одновременно происходит увеличение скольжения. При условии регулирования скорости по линейной частотной зависимости U / (ƒ) = const приложенного напряжения происходит уменьшение максимального момента на 1/3 при меньших скоростях. При частотном регулировании закономерность частотного регулирования напряжения машины напрямую зависит от вида нагрузочной характеристики, приложенной к валу двигателя.
Использование внедрения добавочной ЭДС в цепь ротора, применяется в вентиляционных системах. Двигатели постоянного тока или инверторы напряжения служат источником ЭДС При добавлении ЭДС понижается ток ротора, происходит снижение двигательного момента, скорость вращения двигателя понижается.
Для мощных асинхронных двигателей целесообразно применять закон пропорционального регулирования. Применение этого закона способствует понижению критического момента и соответственно перегрузочной способности двигателя.
Частотное регулирование синхронного двигателя
Скорость синхронного двигателя также регулируется по частотному принципу. Из-за синхронного вращения рота с вращением магнитного поля статора, при уменьшении частоты рабочая характеристика машины падает, при увеличении возрастает.
Применение частотного регулирования для вентиляционных систем
Частотное регулирование вентиляторов происходит на понижение давления вентилятора, это происходит из-за подбора электродвигателя по мощности соответственно к максимальному давлению и производительности вентиляционной системы. Частота вращения вентилятора изменяется по сигналу (обратной связи) от термодатчика с использованием алгоритма пропорционально-интегрального регулирования.
Рис №4. Энергоэффективность при частотном регулировании вентиляционных систем
Электродвигатель для частотного регулирования
Для решения вопросов по сбережению ресурсов и электроэнергии принято решение о разработке и внедрению «умных» асинхронных двигателей, снабженных системами частотного регулирования. Частотный привод снижает нагрузку по току за счет применения плавного пуска. Применение двигателя для частотного регулирования повышает коэффициент полезного действия двигателя и способствует энергосберегающим факторам, позволяет избавиться от многих механизмов, увеличивающих потери по мощности и понижающих надежную работу устройства.
Главное преимущество электродвигателя для частотного регулирования заключается в наличии высокого опрокидывающего момента что, обеспечивает устойчивую работу в самом широком диапазоне регулирования.
принцип работы, способы регулирования частоты вращения асинхронного двигателя, видео
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках. Правда, у него масса недостатков, и одни из них – это быстрый износ щеток, если их установка была проведена с искривлением, да и срок их эксплуатации достаточно низок. При износе происходит искрение, поэтому такой движок во взрывоопасных и запыленных помещениях использовать нельзя. Плюс ко всему электродвигатель постоянного тока стоит дорого. Чтобы изменить данную ситуацию, используют асинхронный двигатель и частотный регулятор для асинхронного двигателя.

Практически по всем показателям электродвигатели, работающие на переменном токе, превосходят аналоги на постоянном. Во-первых, они надежнее. Во-вторых, имеют меньшие габариты и вес. В-третьих, цена ниже. В-четвертых, они проще в эксплуатации и подключении.
А вот недостаток у них один – это сложность регулирования частоты вращения. В данном случае стандартные способы регулирования частоты асинхронных двигателей здесь не подойдут, а именно – изменения напряжения, установка сопротивления и так далее. Частотное управление асинхронным электрическим двигателем – была проблема номер один. Хотя теоретическая база известна аж с тридцатых годов прошлого столетия. Все дело упиралось в дороговизну частотного преобразователя. Все изменилось, когда изобрели микросхемы, с помощью которых через транзисторы стало возможным собрать преобразователь частоты с минимальной себестоимостью.
Принцип регулирования
Итак, способ регулирования частоты вращения асинхронного двигателя основано на одной формуле. Вот она внизу.
ω=2πf/p, где
- ω – угловая скорость вращения статора;
- f – частота входного напряжения;
- p – количество полюсных пар.

То есть, получается так, что изменить скорость вращения электродвигателя можно лишь путем изменения частоты напряжения. Что это дает на практике? Первое – это плавность работы мотора, особенно это будет чувствовать при пуске оборудования, когда сам двигатель работает под самыми высокими нагрузками. Второе – повышенное скольжение. За счет этого растет КПД, и снижаются потери мощностных характеристик.
Структура частотного регулятора
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.

В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Принцип работы
Теперь сам принцип работы частотного преобразователя. Чтобы понять это, предлагаем разобрать рисунок ниже.
 Принцип работы
Принцип работыИтак, пройдемся по рисунку, где
- «В» – это неуправляемый силовой выпрямитель диодного типа.
- «АИН» – автономный инвертор.
- «СУИ ШИМ» – система широтно-импульсного управления.
- «САР» – система автоматического регулирования.
- «Св» – конденсатор фильтра.
- «Lв» – дроссель.
По схеме очень хорошо видно, что инвертор регулирует частоту напряжения за счет системы широтно-импульсного управления (оно высокочастотное). Именно эта часть регулятора отвечает за подключение обмоток статора электродвигателя попеременно то к положительному полюсу выпрямителя, то к отрицательному. Периодичность подключения к полюсам происходит по синусоидальной кривой. При этом частота импульсов определяется именно частотой ШИМ. Так и происходит частотное регулирование.

Заключение по теме
Как видите, данный способ регулирования частоты вращения асинхронного двигателя достаточно прост. Но и не только. Он позволяет уйти от ненадежных двигателей постоянного тока, перейти на более надежные виды электрического оборудования. К тому же структура прибора, основанная на современных методах преобразования электрического тока, сделала его дешевым и доступным. Плюс ко всему простота устройства дает возможность собрать частотники своими руками.
ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
ЧАСТОТНО-РЕГУЛИРУЕМЫИ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД
Наиболее рациональным способом плавного регулирования угловой скорости является частотный способ, возможность которого базируется на линейной зависимости угловой скорости магнитного поля статора от частоты напряжения питания; си0 2к//р„.
По этому принцип}’ возможно осуществление широко регулируемых электроприводов с жесткими механическими характеристиками. Важным преимуществом частотного привода являются благоприятные энергетические показатели. Это объясняется тем, что двигатель работает при малых скольжениях, что обусловливает малые потери и высокий КПД во всем диапазоне регулирования скорости. Однако при изменении частоты возникает необходимость одновременного регулирования напряжения, подводимого к статору. Действительно, ЭДС обмотки статора АД определяется как
Е,=сФU
Если пренебречь падением напряжения в статорной обмотке, ПОЛОЖИВ U~E], TO U 1~сФ/!, т. е. при неизменном напряжении и регулировании его частоты изменяется магнитный поток машины. В частности, уменьшение J) вызовет увеличение потока, что приведет к насыщению магнитопровода двигателя и вызовет резкое возрастание намагничивающего тока, и недопустимый нагрев как стали, так и обмоток статора.
С другой стороны, увеличение// приводит к уменьшению потока, что при постоянстве момента сопротивления вызывает увеличение тока в роторе, т. е. перегрев ротора при недоиспользовании стали. Таким образом, для наилучшего
использования двигателя необходимо регулировать напряжение одновременно в функции частоты, а иногда и в функции момента сопротивления.
Для того чтобы реализовать принцип частотного управления, необходимо взаимосвязанно управлять напряжением (током) в статоре асинхронной машины при изменении частоты питания. Поэтому в разомкнутых системах ПЧ — АД не удается достичь большого диапазона регулирования скорости, так как в сильной степени проявляется етатизм (влияние изменений момента нагрузки) на механические характеристики привода. Кроме того, при снижении скорости может возникать область статической неустойчивости, которая затрудняет практическое использование таких приводов.
Существует несколько алгоритмов одновременного изменения частоты и напряжения статора в статическом режиме. Чаще всего стремятся сохранить постоянной перегрузочную способность двигателя, т. е. сделать так, чтобы при всех режимах отношение максимального момента к моменту сил сопротивления оставалось постоянным:
|

Таким образом, напряжение необходимо регулировать не только в функции частоты, но и в функции нагрузки. Критический момент трехфазного АД:
|
где со0 — синхронная скорость; R/ — активное фазное сопротивление обмогки статора; хк=хі+х’2 — индуктивное фазное сопротивление к. з.
Пренебрегая величиной Ri по сравнению с х* и учитывая, что Х}:^2тс[іЬІГ, можно получить
|

Следовательно, критический момент прямо пропорционален квадрату напряжения и обратно пропорционален квадрату частоты, поэтому
|
Таким образом, для сохранения постоянной перегрузочной способности необходимо изменять напряжение пропорционально частоте и корню квадратному от момента нагрузки. Этот общий принцип регулирования может быть уточнен для конкретных режимов работы механизма:
|

а) При моменте нагрузки, не зависящем от скорости,
Мс=const, и по выражению (*) следует, что напряжение надо изменять пропорционально частоте
U
= const
Такой способ с точностью до принятого допущения R /’= О обеспечивает постоянную перегрузочную способность двигателя на малой скорости. Поскольку справедливо предположение, что Uj-Ei, такой способ регулирования соответствует 0=const. Фактически же, при увеличении нагрузки, ЭДС при постоянном напряжении на статоре уменьшается, что сопровождается уменьшением Мк — Критический момент, а следовательно, и перегрузочная способность двигателя возрастает, если использовать способ регулирования с поддержанием O=const во всем диапазоне скоростей и нагрузок.
б) При моменте нагрузки, требующем постоянства мощности на всех скоростях, те. при изменении момента нагрузки обратно пропорционально скорости Мс=Р/со, считая, что скорость двигателя пропорциональна частоте, из (*) следует, что напряжение необходимо изменять пропорционально корню квадратному из частоты
и
= const
|

в) При вентиляторной характеристике механизма, т. е.
при Мс=СО)2 из (*) следует, что напряжение необходимо изменять пропорционально квадрату частоты
—— = const
|

Благодаря своей простоте, данные зависимости широко распространены на практике, однако они являются приближенными. При малых частотах и малых напряжениях на двигателе возрастает роль падения напряжения на активном сопротивлении статора. Если снижать напряжение строго пропорционально частоте при Mc=const, то это приведет к уменьшению магнитного потока. Поэтому в частотном приводе напряжение должно снижаться в меньшей степени. Для этого применяют систему IR-компенсации, в которой закон регулирования Uj/f)= const заменен соотношением
|і/, —IlRl I / fі = const
В приводах, в которых производится компенсация падения напряжения на сопротивлении статора, поддерживается постоянное соотношение между частотой и напряжением | U)—
///;/], которое отличается от напряжения сети на величину падения напряжения на активном сопротивлении статора.
Оптимальный закон частотного управления при постоянстве перегрузки является не единственным, используемым на практике. Например, часто реализуются другие законы: постоянства магнитного потока машины, минимума потерв и другие. Частотное регулирование с поддержанием постоянства потока практически тождественно управлению с компенсацией падения напряжения в статорных цепях. При этом асинхронный привод приобретает следующие свойства:
1. Токи статора, ротора и поток (кроме потерь в стали) остаются неизменными.
2. При работе с максимальным потоком двигатель имеет более жесткую рабочую часть механической характеристики и больший критический момент на естественной характеристике.
3. При уменьшении нагрузки поток становится избыточным, что приводит к завышению потерь и нарушению оптимальности этого закона регулирования при переменном моменте нагрузки.
При управлении по минимуму потерв создание необходимого момента, пропорционального произведению тока ротора на поток, осуществляется при равенстве переменных и постоянных потерь, связанных с возбуждением машинві (ее магнитным потоком)- Такое управление обеспечивает минимум потерь и оптимальность КПД привода.
Наглядное представление о перечисленных выше законах частотного регулирования скорости АД дает схема замещения (рис. 1. 6), представленная в относительных единицах на рис. А. На схеме обозначено:
0. со0/(оп относительная частота;
v=co/co„ — относительная скорость ротора:
/]=o.-v = (co0-oj)/coi1 — абсолютное скольжение, значение которого не зависит от о.(со0).
Рассмотрим механические характеристики co-f(M) асинхронного двигателя при различных законах изменения напряжения на зажимах статора при частотном регулировании.
1. Характеристика co=f(M) при законе регулирования скорости Ui/o.=consl (кривая 1 на рис.4). Из схемы видно, что поскольку R] не зависит от о., то по мере снижения частоты доля падения напряжения на активном сопротивлении растет и напряжение за активным сопротивлением Е! а уменьшается. ЭДС двигателя E’ja, которая должна была бы уменьшаться пропорционально а, уменьшается в большей степени, что вызывает снижение жесткости и критического момента по мере уменьшения частоты.
Рисунок 4 — Схема замещения є относительных единицах и механические характеристики при различных законах частотного управления |
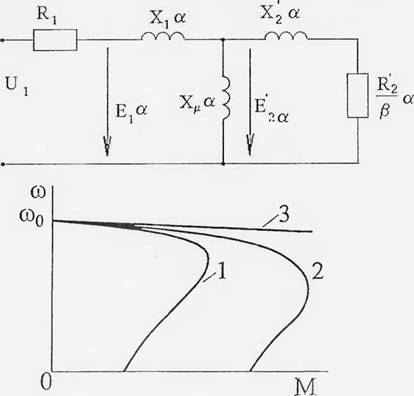
2. Регулирование напряжения с компенсацией падения напряжения в активном сопротивлении обмотки статора. Если напряжение на зажимах двигателя менять таким образом, что EJo.=const, то величина потока не зависит от частоты питающего напряжения, а зависит от тока двигатечя. Механические характеристики при таком способе регулирования скорости будут обладать требуемой перегрузочной способностью и высокой жесткостью во всем диапазоне регулирования скорости. При номинальной частоте характеристика co=f(M) практически совпадает с характеристикой при законе U i/a,=const.
3. Характеристика co=f(M) при Ф=const или E^/a=const (кривая 2). При Ф=const максимальный момент двигателя получается значительно больше, чем максимальный момент, развиваемый двигателем при регулировании по закону EJo.=const.
4. Характеристика co=f(M) при законе поддержания постоянства потокосцепления ротора, который обеспечивается путем изменения напряжения на зажимах статора в функции частоты а и абсолютного скольжения /і, причем эти функции нелинейны. В этом случае механическая характеристика представляет собой прямую, подобную характеристике двигателя постоянного тока с независимым возбуждением (кривая 3 на рис. 4). Данный способ регулирования скорости реализуется в системах векторного управления.
Частотный преобразователь
27.05.2019Частотный преобразователь напряжения — это электрический прибор, служащий для преобразования напряжения и частоты переменного тока в напряжение с заданной амплитудой и частотой. Он также способен преобразовывать постоянное напряжение в переменное с заданными характеристиками.
 Частотные преобразователь Toshiba
Частотные преобразователь ToshibaДля чего нужен частотный преобразователь?
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).
 Насос водяной
Насос водяной  Канальный вентилятор
Канальный вентиляторРассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.
 Асинхронный электрический двигатель
Асинхронный электрический двигательТрехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая – в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 – s)
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.
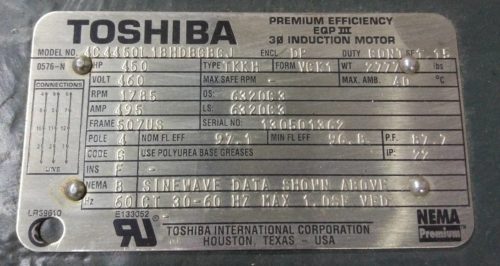 Шильдик электродвигателя EQPIII Toshiba
Шильдик электродвигателя EQPIII ToshibaПринцип работы частотного преобразователя
Вот тут и приходит на помощь частотный преобразователь, иначе говоря ЧРП (частотно-регулируемый привод). Он, как говорилось в самом начале, позволяет задавать на своем выходе заданные в настройках амплитуду напряжения и частоту переменного тока.
Частота вы выходе может регулироваться в диапазоне 0.01 – 590 Гц если брать инверторы серии AS3 Toshiba. Для серии S15 Toshiba диапазон регулирования находится в пределах 0.01 – 500 Гц. Для серии nC3E Toshiba диапазон регулирования находится в пределах 0.01 – 400 Гц. Это объясняется функциональным назначением разных серий ПЧ.
Напряжение на выходе может изменяться в диапазоне от 0 В до напряжения питания ПЧ, т.е. текущего напряжения на входе частотного преобразователя. Это свойство можно использовать для получения нужного выходного напряжения и частоты, что ценно, например, для испытания стендового оборудования. Правда для этого придется использовать специальный выходной синусный фильтр, чтобы получить чистые синусоидальное напряжение и ток.
С частотой все понятно, но зачем нужно изменять напряжение?
Дело в том, что для поддержания определенного магнитного поля в обмотках статора требуется изменять не только частоту, но и напряжение. Получается, что частота должна соответствовать определенному напряжению. Этот называется законом скалярного управления U/f (V/f), где U или V – напряжение.
Также существует закон векторного регулирования. Векторное регулирование используется для оборудования, где требуется поддерживать необходимый крутящий момент на валу при низких скоростях электродвигателя, высокое быстродействие и точность регулирования частоты вращения. Векторное управление представляет собой математический аппарат в «мозге» частотного преобразователя, который позволяет точно определять угол поворота ротора по токам фаз двигателя.
Использование частотника позволяет убрать большой пусковой ток, достигая таким образом значительного экономического эффекта при частых пусках и остановках электродвигателя.
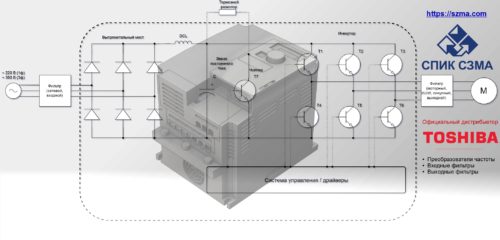
Схема частотного преобразователя
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.
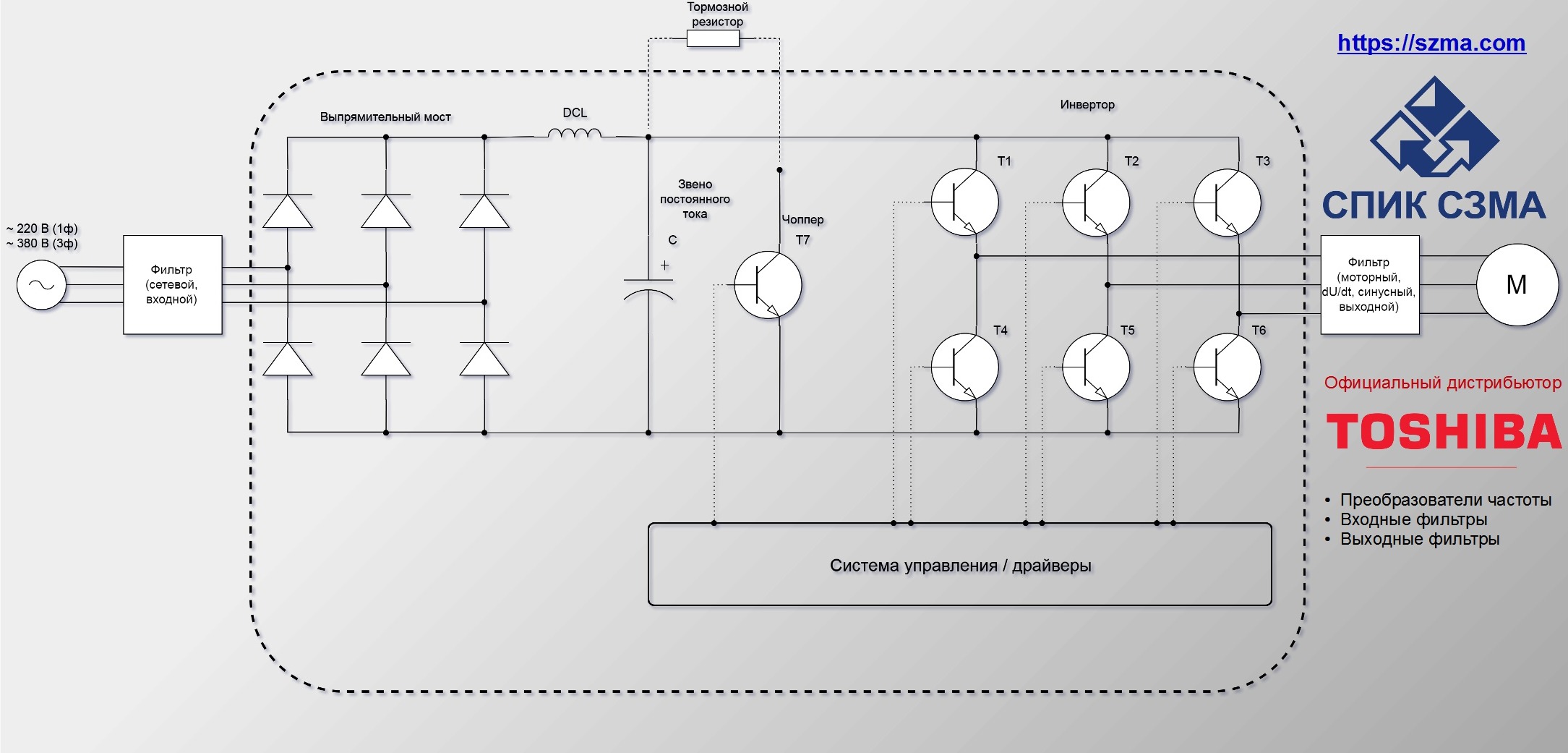 Схема преобразователя частоты
Схема преобразователя частотыНапряжение в звене постоянного тока после выпрямления трехфазного напряжения будет равно согласно формуле: 380*1,35 = 513 В.
Дроссель DCL в звене постоянного тока позволяет дополнительно сгладить пульсации напряжения после диодного моста и выполняет функции снижения гармоник выпрямителя, инжек