Частотный преобразователь своими руками
Иногда в быту возникает необходимость регулировать частоту вращения асинхронного двигателя. У меня например сломалось старенькое точило и решено было его осовременить и исправить недостатки: увеличить мощность и сделать регулировку оборотов, чтобы большие точильные круги не приводили к диким вибрациям.
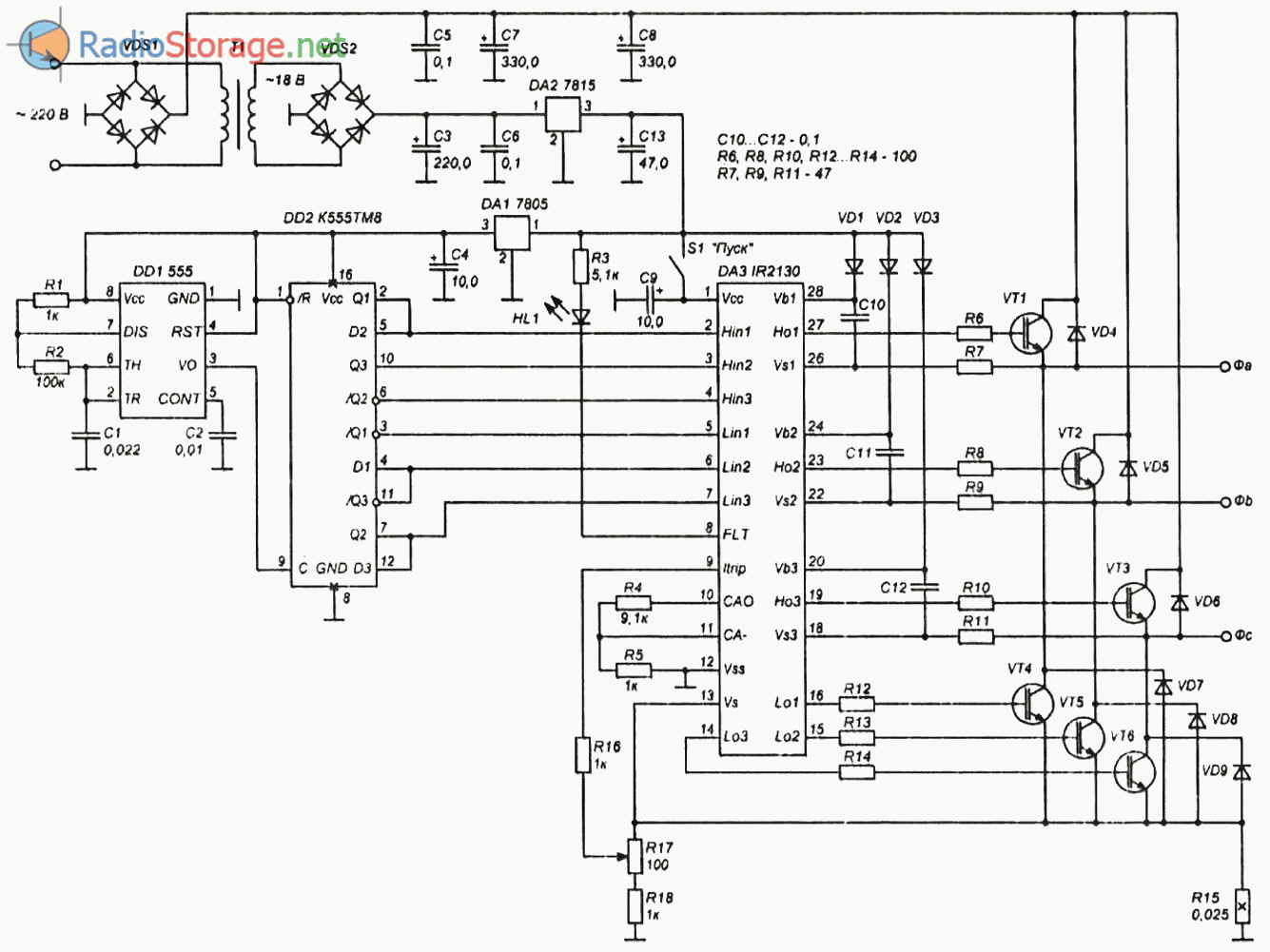
Схема силовой части частотного преобразователя
Устройство состоит из:
Корректор коэффициента мощности. Он позволяет получить на выходе напряжение выше сетевого выпрямленного (соответственно выше мощность мотора), с более низким уровнем пульсаций и позволяет применить сетевой сглаживающий электролитический конденсатор меньшей величины, ККМ Вещь нужная, особенно для высоких мощностей, когда пиковые токи на электролитах достигают неприличных величин. Контроллер ккм работает в критическом режиме, соответственно можно применить полупроводники с не самыми лучшими характеристиками.
Дежурка: выдает два напряжения 15 вольт для питания ккм и модуля IGBT и 5 вольт для микроконтроллера.
Модуль IGBT самый дешевый с алиэкспресса что удалось найти (FNA41560), на мощность до 1500 Ватт, но это не точно. Модуль содержит 6 транзисторов с драйверами, датчик температуры, вывод аварии и цепи защиты от перегрузки.
Схема микроконтроллера
Модулем IGBT управляет STM8S105. Он умеет три комплиментарных вывода ШИМ с аппаратным дедтаймом. Индикация осуществляется TM1637, частота регулируется переменным резистором. Частота регулируется 2-100 Гц, зависимость V/F. Частота работы ШИМ 5 кгц. Логика программы очень проста: Таймер 1 управляет 3 комплиментарными каналами ШИМ, по сигналу от таймера 2 меняется заполнение ШИМ в 3 каналах по таблице синусов со сдвигом 120 градусов, соответственно регулируя частоту срабатывания таймера 2 регулируем частоту вращения двигателя. Между делом измеряется температура, вычисляется положение переменного резистора в выводится информация на индикатор.
Для надежного запуска pfc необходимо перемычкой подать 15 вольт с разъёмы Х1 на вывод 8 D1.
Ниже приведена осциллограмма выходных сигналов ШИМ микроконтроллера сглаженных rc фильтрами при частоте установки 50 Гц со сдвигом фаз 120 градусов.
Устройство реализовано на 4 печатных платах, чтобы поместить в распределительную коробку 120 на 80 мм.
На основной плате расположен сетевой выпрямитель с силовыми элементами ккм, модуль IGBT и колодки коммутации.
На следующих платах выполнен контроллер ккм
Дежурка
Схема микроконтроллера
Фото устройства в сборе
При включении и при крайнем положении переменного резистора на дисплей выводится температура, двигатель не работает.
Далее, поворачивая резистор, изменяется частота вращения двигателя от 1 герца до 100.
При повышении температуры более 40 градусов включается вентилятор. При дальнейшем повышении температуры отключается двигатель до момента остывания IGBT модуля.
Применение ккм позволила достичь коэффициента мощности 0,98 и снизить амплитуду потребляемого тока:
Осциллограмма входного тока с ккм и без, при одинаковой нагрузке
Пиковые значения потребляемого тока от сети заметно ниже и они повторяют форму сетевого напряжения.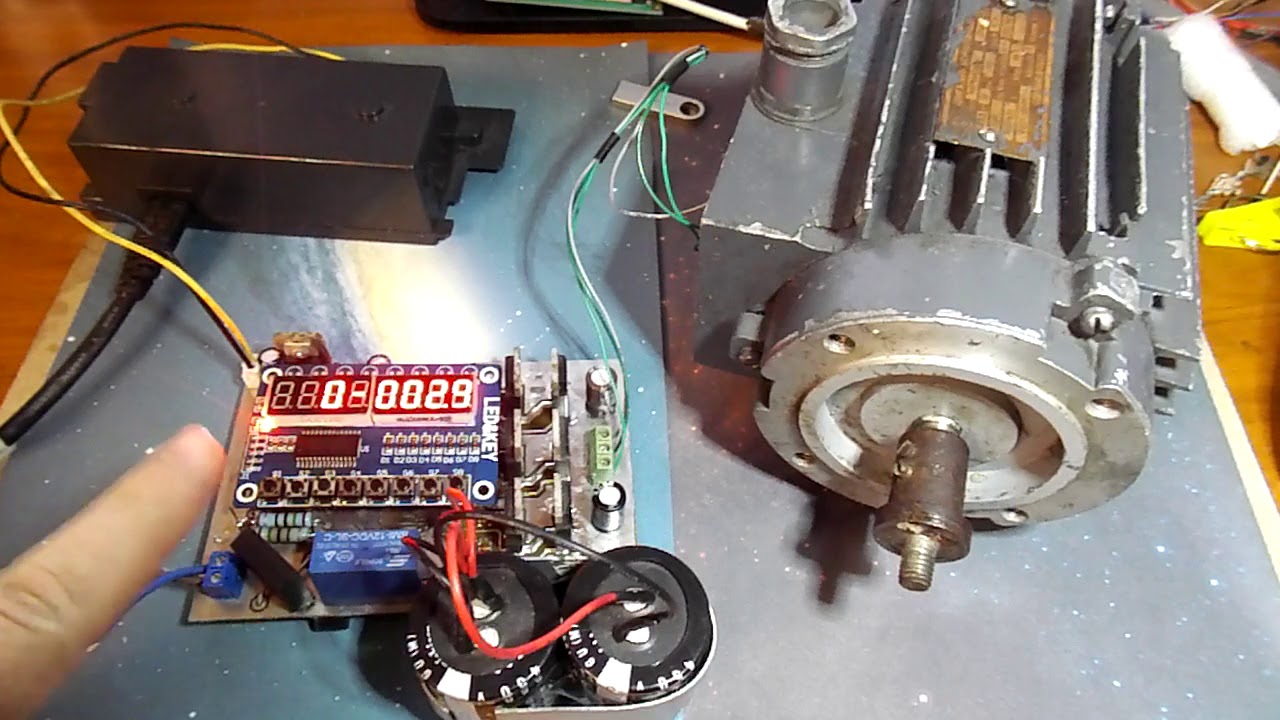
Измерение коэффициента мощности с ккм и без, при одинаковой нагрузке(первый параметр — питающее сетевое напряжение, второй — потребляемый ток, третий -коэффициент мощности):
Во вложении исходник программы и печатных плат. В микроконтроллере достаточно места для модернизации (можно добавить реверс, торможение, реализовать работу аппаратного зуммера, подмешать в синус третью гармонику). Данный регулятор рассчитан на мощность около 200 Вт. При использовании на номинальной мощности на силовые полупроводники требуется установить небольшие радиаторы.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| R1 | 1206 | 330k | 1 | Поиск в магазине Отрон | В блокнот | ||
| R2 | 1206 | 330k | 1 | Поиск в магазине Отрон | В блокнот | ||
| R3 | 0805 | 75r | 1 | Поиск в магазине Отрон | В блокнот | ||
| R4, R11 | 1206 | 750K | 2 | Поиск в магазине Отрон | В блокнот | ||
| R5, R10, R8 | 2512 | 0.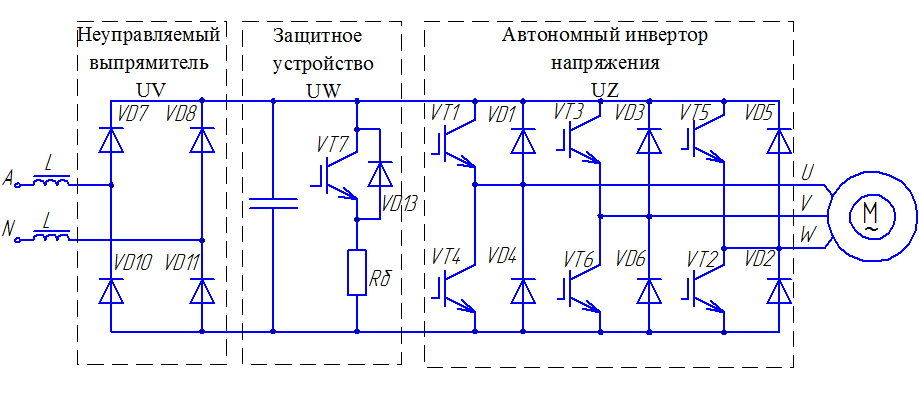 | 3 | Поиск в магазине Отрон | В блокнот | ||
| R6, R14 | 1206 | 750K | 2 | Поиск в магазине Отрон | В блокнот | ||
| R9 | NOT USE | 0805 | 0 | Поиск в магазине Отрон | В блокнот | ||
| R12 | 0805 | 6.8K | 1 | Поиск в магазине Отрон | В блокнот | ||
| R15 | 0805 | 100K | 1 | Поиск в магазине Отрон | В блокнот | ||
| R17 | 0805 | 22K | 1 | Поиск в магазине Отрон | В блокнот | ||
| R18 | 0805 | 0 | 1 | Поиск в магазине Отрон | В блокнот | ||
| R19,21,22,29,30,31 | 0805 | 100R | 6 | Поиск в магазине Отрон | В блокнот | ||
| R20 | 0805 | 470R | 1 | Поиск в магазине Отрон | В блокнот | ||
| R24, R25 | 2512 | 0. 33R 33R | 2 | Поиск в магазине Отрон | В блокнот | ||
| R26 | 0805 | 10.5K | 1 | Поиск в магазине Отрон | В блокнот | ||
| R27 | 0805 | NOT USE | 1 | Поиск в магазине Отрон | В блокнот | ||
| R33 | 0805 | 3.3R | 1 | Поиск в магазине Отрон | В блокнот | ||
| R34, R35 | 1206 | 75K | 2 | Поиск в магазине Отрон | В блокнот | ||
| R36, R37 | 0805 | 1M | 2 | Поиск в магазине Отрон | В блокнот | ||
| R39 | 0805 | 1K | 1 | Поиск в магазине Отрон | В блокнот | ||
| R4 | 0805 | 470R | 1 | Поиск в магазине Отрон | В блокнот | ||
| R41 | 1206 | 1K | 1 | Поиск в магазине Отрон | В блокнот | ||
| R42, R43 | 1206 | 4. 7R 7R | 2 | Поиск в магазине Отрон | В блокнот | ||
| R44 | 0805 | 100R | 1 | Поиск в магазине Отрон | В блокнот | ||
| R16 | 0805 | 4.7R | 1 | Поиск в магазине Отрон | В блокнот | ||
| c1, C7 | 0.22UF | 2 | Поиск в магазине Отрон | В блокнот | |||
| C3 | 1206 | NOT USE | 1 | Поиск в магазине Отрон | В блокнот | ||
| C4 | 0805 | 1000P | 1 | Поиск в магазине Отрон | В блокнот | ||
| C5 | 1206 | 4.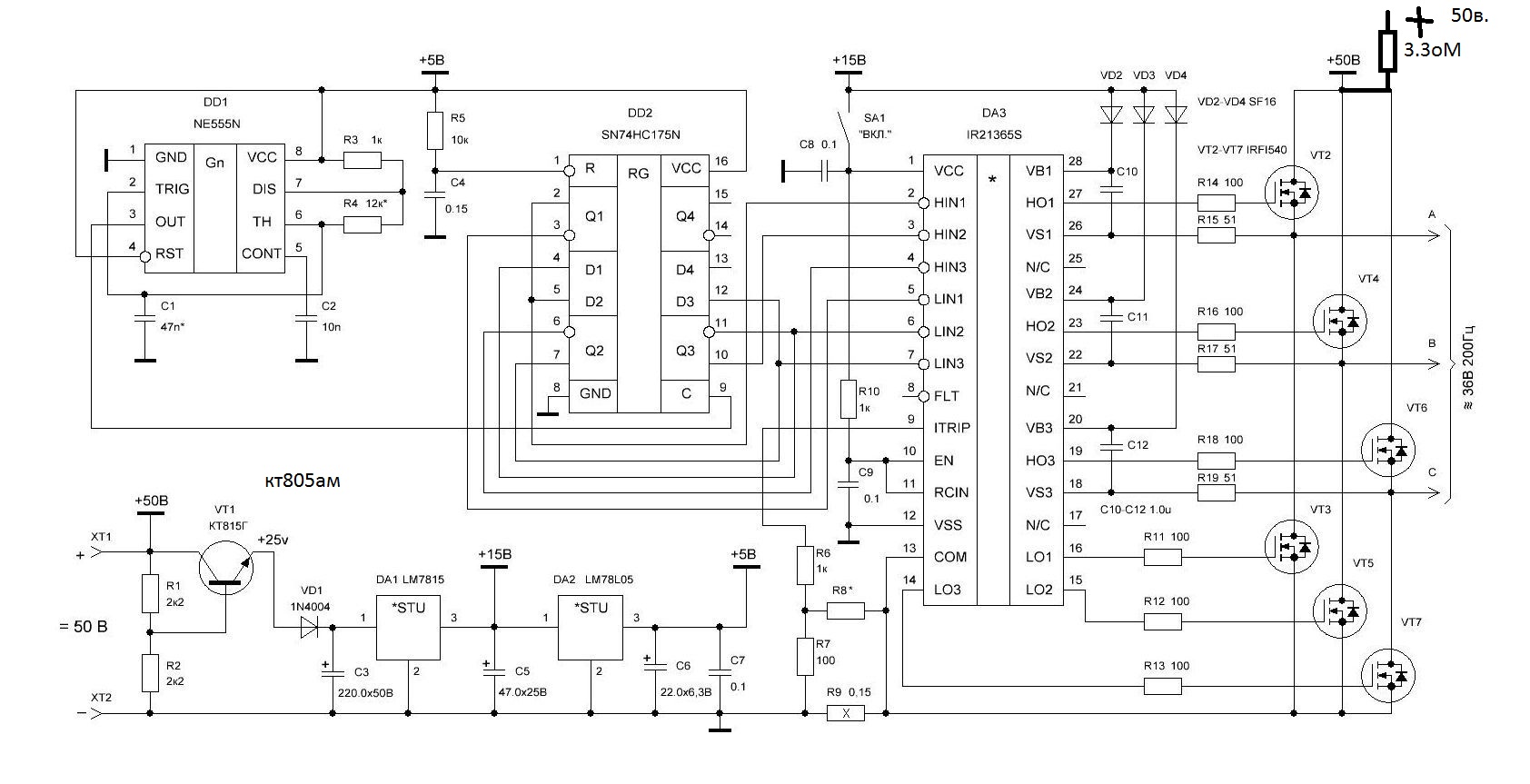 7UF 7UF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C2.C24 | 68UF 400V | 2 | Поиск в магазине Отрон | В блокнот | |||
| C10,11,19-22 | 0805 | 1000PF | 6 | Поиск в магазине Отрон | В блокнот | ||
| C6,8,9 | 1210 | 10UF | 3 | Поиск в магазине Отрон | В блокнот | ||
| C14 | 0805 | 0.1UF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C15 | 0805 | 2.2UF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C16 | 0805 | 470PF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C17 | 0805 | 220PF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C18 | NOT USE | 1 | Поиск в магазине Отрон | В блокнот | |||
| C13, C28 | 1206 | 0. 1UF 500V 1UF 500V | 2 | Поиск в магазине Отрон | В блокнот | ||
| C29 | 1210 | 22UF 25V | 1 | Поиск в магазине Отрон | В блокнот | ||
| C31 | 0805 | 0.15UF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C30, C32 | 1206 | 4.7UF 25V | 2 | Поиск в магазине Отрон | В блокнот | ||
| C26, C33 | 1210 | 22UF 25V | 1 | Поиск в магазине Отрон | В блокнот | ||
| C7 | 1210 | 4.7UF | 1 | Поиск в магазине Отрон | В блокнот | ||
| C23 | 0805 | 470PF 200V | 1 | Поиск в магазине Отрон | В блокнот | ||
| C25 | 1206 | 0. 01UF 630V 01UF 630V | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD2 | MOST | KBL 06 | 1 | В блокнот | |||
| VD5 | SOD323 | 16V | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD4,3 | SOD323 | NOT USE | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD8 | SOD323 | BAS321 | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD7,9,10 | STABILITRON | 25V | 3 | Поиск в магазине Отрон | В блокнот | ||
| VD1 | T0220 | ULTRAFAST 600V | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD13 | SOD323 | BAS321 | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD12 | 1A 600V | 1 | Поиск в магазине Отрон | В блокнот | |||
| VD11 | SMB | 100V 2A | 1 | Поиск в магазине Отрон | В блокнот | ||
| VD14 | SOD323 | 15V STABILITRON | 1 | Поиск в магазине Отрон | В блокнот | ||
| VT1 | TO220 | P20NM60 | 1 | Поиск в магазине Отрон | В блокнот | ||
| D1 | SO8 | NCP1608 | 1 | Поиск в магазине Отрон | В блокнот | ||
| D2 | DIP8 | OB2358 | 1 | Поиск в магазине Отрон | В блокнот | ||
| D3 | 1117S5.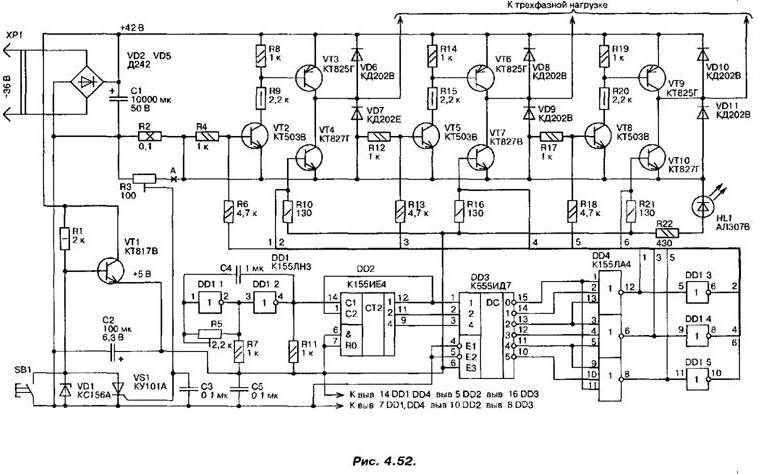 0 0 | 1 | Поиск в магазине Отрон | В блокнот | |||
| U1 | FNA41560 | 1 | Поиск в магазине Отрон | В блокнот | |||
| L3 | 4.7UH | 1 | Поиск в магазине Отрон | В блокнот | |||
| L1 | ETD29 | 1 | Поиск в магазине Отрон | В блокнот | |||
| TR1 | ТЕРМИСТОР | 10R | 1 | Поиск в магазине Отрон | В блокнот | ||
| RU1 | ВАРИСТОР | 430V | 1 | Поиск в магазине Отрон | В блокнот | ||
| U2 | SO4 | PC817 | 1 | Поиск в магазине Отрон | В блокнот | ||
| T1 | T1 | EFD15 | 1 | Поиск в магазине Отрон | В блокнот | ||
| LCD | LCD | TM1637 | 1 | Поиск в магазине Отрон | В блокнот | ||
| Добавить все | |||||||
Скачать список элементов (PDF)
Теги:
- STMicroelectronics
- Altium Designer
- Преобразователь напряжения
- Микроконтроллер
выбор и расчёт, управление, сборка своими руками • Мир электрики
Содержание
- Понятие о принципе работы частотника
- Советы по выбору частотников
- Расчёт частотника для электродвигателя
- Необходимые материалы для самодельного частотника
- Подключение и настройка
- Эксплуатация частотника
Одним из главных недостатков асинхронных двигателей является сложность регулировки частоты вращения. Изменять её можно тремя способами: изменением количества пар полюсов, изменением скольжения и изменением частоты. В последнее время для регулирования скорости вращения асинхронного короткозамкнутого двигателя частоту тока меняют с помощью частотных преобразователей для электродвигателя.
Изменять её можно тремя способами: изменением количества пар полюсов, изменением скольжения и изменением частоты. В последнее время для регулирования скорости вращения асинхронного короткозамкнутого двигателя частоту тока меняют с помощью частотных преобразователей для электродвигателя.
Понятие о принципе работы частотника
В последнее время на производстве стали широко использоваться высокочастотники, у многих неопытных новичков, встречающих их на практике, часто возникает вопрос, что такое частотный преобразователь и для чего он нужен. Достоинствами частотного привода для электродвигателя являются:
- снижение электропотребления двигателем;
- улучшение показателей работы: плавность запуска и регулировки скорости вращения;
- исключение возможных перегрузок.
Плавность пуска обеспечивается преобразователем благодаря снижению с его помощью пускового тока, который без частотника превышает номинальный ток в 5–7 раз.

Основными частями в устройстве преобразователя являются инвертор и конденсаторы. Инвертор обычно выполнен из диодных мостов. Его задача — выпрямить напряжение на входе, которое может принимать значение 220В или 380В в зависимости от количества фаз, но сохранить при этом пульсации. Затем конденсаторы выпрямленное напряжение сглаживают и фильтруют.
Потом постоянный ток отправляется на микросхемы и выходные мостовые IGBT-ключи. Обычно мостовой IGBT-ключ — это шесть транзисторов, соединённых по мостовой схеме. Защиту от пробоя напряжения обратной полярности осуществляют диоды. В более ранних схемах вместо транзисторов были использованы тиристоры, значительными недостатками которых были некоторая замедленность в работе и помехи.
Благодаря этим устройствам возникает широтно-импульсная последовательность с необходимой частотой. На выходе частотника импульсы напряжения имеют прямоугольный вид. А после того как они проходят через обмотку статора, вследствие её индуктивности, принимают синусоидальный вид.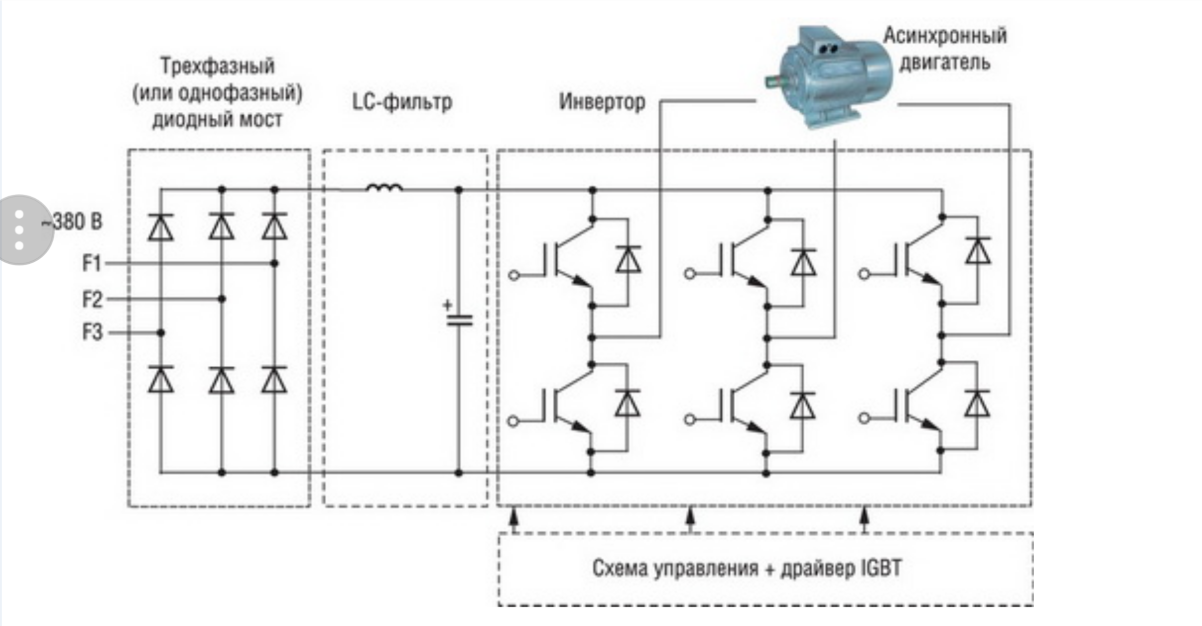
Чтобы понять, зачем нужен инвертор, необходимо уяснить, что ток бывает постоянным и переменным. И если преобразователи частоты используются при работе с переменным током, то для управления электромотором постоянного тока необходим электропривод постоянного тока. Он называется инвертором и его назначением в схеме является контроль тока возбуждения. И он также независимо от изменений нагрузки может поддерживать скорость вращения ротора в требуемых пределах и осуществлять его торможение.
Советы по выбору частотников
При выборе частотника наиболее низкая стоимость определена набором минимальных функций. Рост стоимости пропорционален их увеличению.
Первоначально преобразователи классифицируют по мощности. Не менее важными параметрами являются перегрузочная способность и тип исполнения.
Мощность частотника должна быть не меньше максимальной мощности установки. Для оперативного ремонта или замены в случае поломки частотного привода для электромотора желательно, чтобы сервис-центр был расположен в непосредственной близости.
Для оперативного ремонта или замены в случае поломки частотного привода для электромотора желательно, чтобы сервис-центр был расположен в непосредственной близости.
При выборе преобразователя немаловажным фактором является его напряжение. Если подобрать частотник определённого напряжения, а в сети оно окажется более низким, то он будет отключаться. Если же напряжение сети будет длительно допускать допустимое напряжение, то это приведёт к его повреждению и невозможной дальнейшей работе. С учётом этих рисков нужно выбирать частотники с большим интервалом допустимого напряжения.
Существует два типа управления преобразователей: векторное и скалярное.
При скалярном управлении удерживается постоянство между значением напряжения и частоты на выходе. Это наиболее простой тип частотников, и, вследствие этого, более дешёвый.
При векторном управлении из-за снижения статической ошибки управление осуществляется более точно. Но и стоимость асинхронного преобразователя частоты с этим видом управления более высока в сравнении со скалярным управлением.
Зона регулирования частоты тока должна быть в необходимых пределах. Для диапазонов с регулировкой по частоте более, нежели в 10 раз лучше выбрать векторное управление.
Количество вводов должно быть оптимальным, потому как при слишком большой их численности цена прибора для изменения частоты будет неоправданно завышена, а также могут возникнуть некоторые сложности при его настройке.
Необходимо учесть перегрузочные способности частотника по току и мощности. Ток частотника должен быть чуть больше, нежели номинальный ток двигателя. В случае возникновения ударных нагрузок необходим запас по пиковому току, который должен быть не менее 10% от ударного тока.
Расчёт частотника для электродвигателя
Для того чтобы преобразователь частоты имел возможность работать надёжно и соблюдать заданные значения, необходимо рассчитать его основные параметры:
- тип исполнения;
- ток;
- мощность.
Расчёт тока преобразователя производится по формуле:
где Р – номинальная мощность двигателя, квт;
U – напряжение, В
сosφ – значение коэффициента мощности
Правильный выбор мощности прибора для изменения частоты сказывается на эффективности работы установки. При заниженной мощности частотного преобразователя производительность оборудования будет невысокой. Длительные перегрузки при работе могут привести к поломке преобразователя частоты.
При завышенной мощности частотного преобразователя и скачках напряжения или перегрузке не сработает защита электродвигателя, что приведёт к его повреждению. U
Мощность частотника должна быть больше номинальной мощности соответствующего двигателя на 15%.
Необходимые материалы для самодельного частотника
Изготовить частотник своими руками практически возможно. Для этого нужно определиться с основными деталями, приобрести их, изучить схему сборки. Затем приступить к процессу изготовления.
Затем приступить к процессу изготовления.
В начале работы необходимо запастись двумя платами. На одной из плат необходимо установить микроконтроллер и индикатор. На второй — транзисторы, диодный мост, входные клеммы, блок питания и драйвер. Между собой платы необходимо соединять гибким проводом.
Питания будет производиться с помощью импульсного блока.
Для управления маломощным мотором достаточно будет установки токового шунта и подключённого к нему усилителя DA-1. Сечение жил токового шунта составляет полмиллиметра. Для двигателей с более высокой мощностью установки токового шунта недостаточно и поэтому необходимо устанавливать трансформатор.
При мощности двигателей более 0,4 КВт необходима установка термодатчиков.
Микросхема IL300 с линейной развязкой позволяет контролировать параметры электродвигателя.
Оптроны типа ОС2–4 необходимы для дубляжа управляющих кнопок.
В результате эксплуатации вследствие большой протяжённости проводов могут возникать помехи.
Устранить их можно с помощью специальных колец для удаления помех.
Подключение и настройка
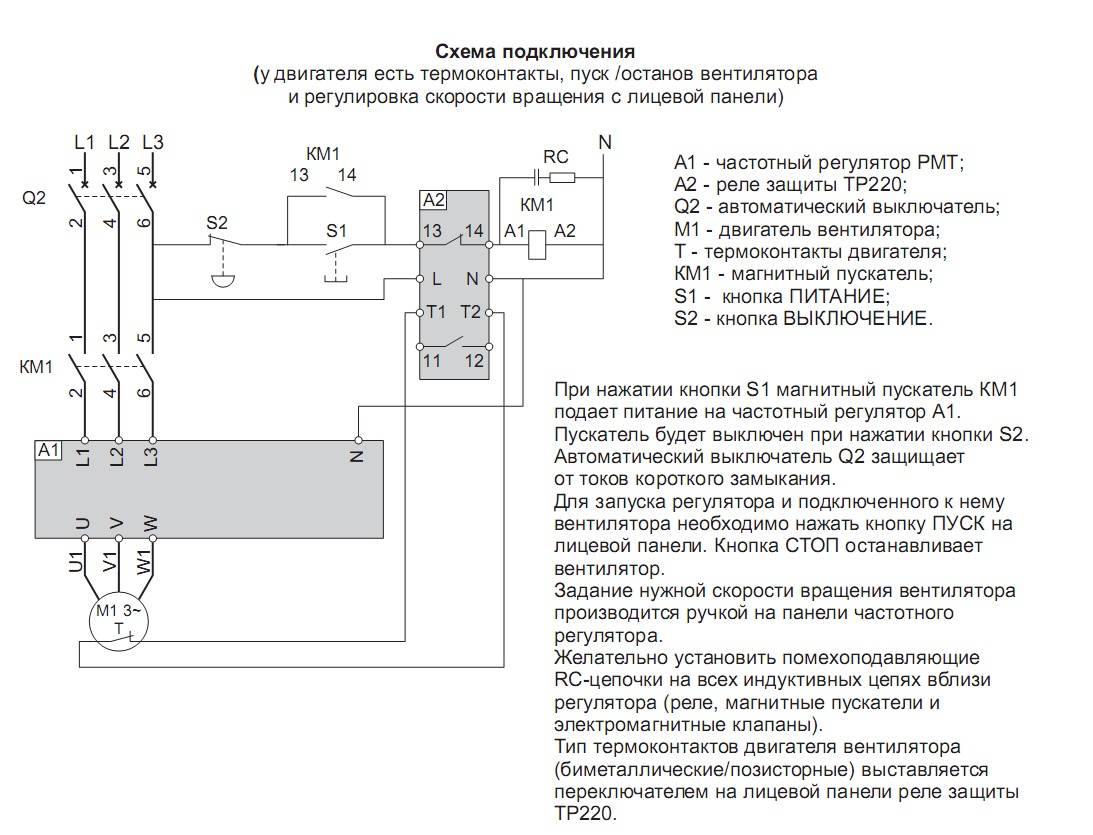
При подключении асинхронного преобразователя частоты в сеть однофазного тока клеммы двигателя необходимо соединить в «треугольник». Эта схема соединения подразумевает присоединение конца и начала соседних обмоток. Напряжение питания при этом будет 220 В. Выходной ток необходимо удерживать в пределах не более половины его номинального значения.
Если частотник подключается к трехфазной сети, то клеммы двигателя соединяются в «звезду». При этой схеме соединения концы трёх фаз обмоток соединяются в одну точку. Напряжение от сети принимает значение 380В.
Очерёдность подключения общей электрической цепи будет следующей:
- дифференциальный автоматический выключатель, ток которого совпадает с номинальным током двигателя;
- преобразователь частоты;
- электродвигатель.
При работе с трехфазной сетью автоматический выключатель должен быть снабжён общим рычагом по всем трём фазам.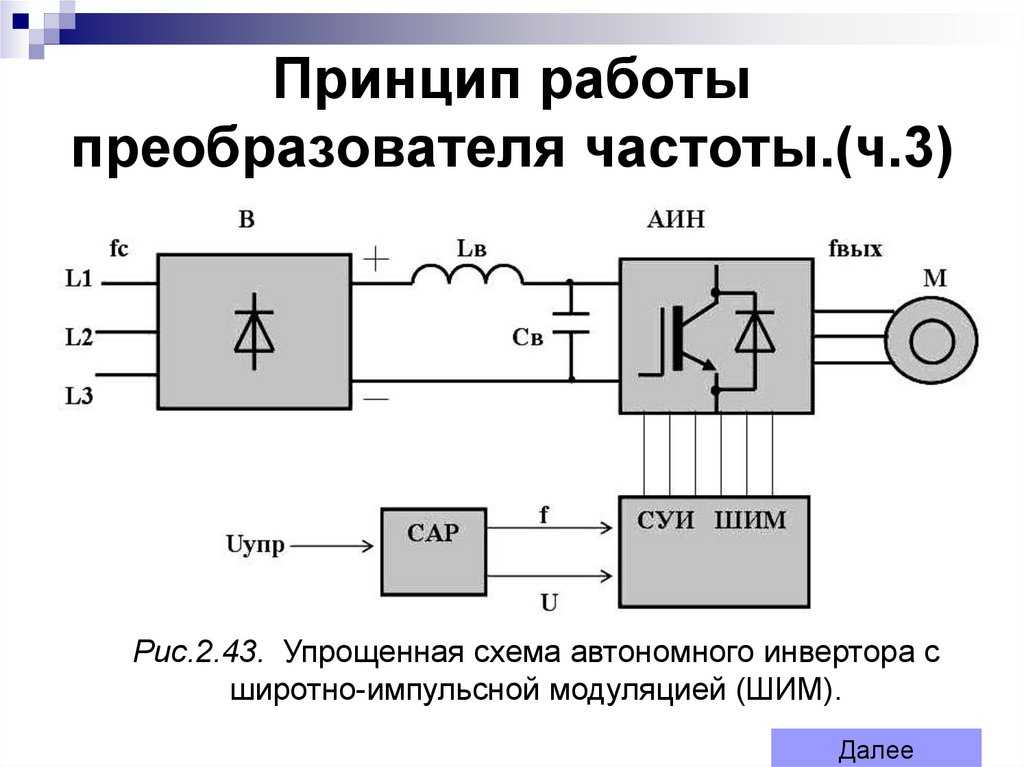 В таком случае перегрузка одной из фаз будет устранена выключением всего питания. Допустимый ток срабатывания должен быть рассчитан на основе значения тока двигателя в одной фазе.
В таком случае перегрузка одной из фаз будет устранена выключением всего питания. Допустимый ток срабатывания должен быть рассчитан на основе значения тока двигателя в одной фазе.
При установке преобразователя в однофазную сеть допустимый ток автоматического выключателя должен превышать в три раза значение фазного тока.
Подключается преобразователь к электромотору с помощью магнитного пускателя. Выбирается магнитный пускатель по напряжению сети и номинальному току.
Перед монтажом пульта управления его рычаг должен быть в положении «Выключено». При включении рычага обязательным условием есть появление сигнала на световом индикаторе. Клавишей RUN производится запуск частотника. А рукоятка пульта управления контролирует изменение числа оборотов ротора двигателя.
Следует с особым вниманием изучить значение частоты на частотнике, так как на одних моделях указывается частота вращения ротора электродвигателя, а на других приведена частота тока преобразователя.
Настройка частотного преобразователя для электродвигателя начинается с внимательного изучения инструкции, так как в ней указана последовательность этих операций.
Для того чтобы настроить частотный преобразователь для электродвигателя, необходимо произвести правильный выбор типа проводов и верный размер их сечения.
Перед настройкой частотника необходимо правильно обнаружить и подключить входные и выходные клеммы. Входные клеммы маркируются буквой L с указанием нумерации фазы. Выходные клеммы обозначены латинскими буквами — U, V, W.
Так как параметров у преобразователя заводского исполнения довольно-таки много, частично его настройка производится на заводе. Остальные параметры настраиваются вручную. Основные этапы настройки частотного преобразователя:
- подача питания на частотный преобразователь;
- выбор определённого режима работы;
- установка значений рабочих характеристик оборудования.
Эксплуатация частотника
Правильный порядок эксплуатации преобразователя частоты заключается в выполнении основных операций:
- Систематическая очистка частотного привода для электродвигателя от пыли и грязи.
- Регулярно менять детали, срок годности которых истекает.
- Постоянный контроль напряжения и температуры.
- Работа устройства должна проходить при заданных условиях: не превышать допустимый уровень пыли, влажности, температуры окружающей среды.
Нежелательным является попадание прямых солнечных лучей на частотник, отсутствие достаточной вентиляции. Материалы и жидкости, которые достаточно легко воспламеняются, не должны находиться рядом с ним. В помещении регулярно должна проводиться обработка против грызунов. Место установки частотного привода для электродвигателя не должно иметь шероховатостей, позволять вибрации.
Частотники для двигателя мощностью около 3 КВт являются наиболее распространёнными ввиду компактности, относительно невысокой цены, простоты установки и обслуживания
Собирать вручную частотники для двигателей мощностью 3 КВт и больше нет смысла — они будут довольно дорогими по цене и не всегда обеспечивать необходимую точность в работе.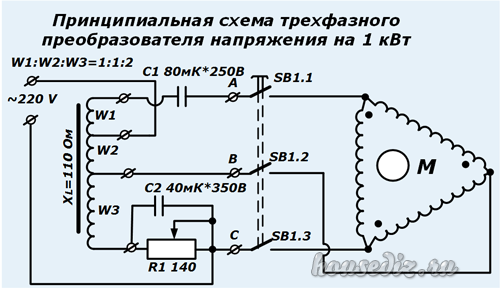
Для двигателей мощностью 3 КВт преобразователи частоты находят применение:
- в системах вентиляции для контроля скорости вращения вентилятора;
- для одновременности работы принимающего и подающего конвейеров;
- для подачи сырья с контролем его объёма;
- для управления несколькими насосами;
- для контроля работы погружным насосом;
- для регулировки скорости подачи сырья в дробилках.
Частотники для двигателей большей мощности отличаются величиной максимальной выходной частоты, наличием фильтра электромагнитной совместимости (ЕМС), видом режима управления.
Например, у частотного привода для электродвигателя мощностью 15 КВт максимальная выходная частота меньше, нежели у преобразователя для двигателя мощностью 3 КВт. ЕМС фильтр для такого двигателя не предусмотрен. Режим управления только скалярный.
Однофазовая переменная частота привод VFD Схема
Вы здесь: Контроллер Home / Motor / Однофазное переменное частота привод VFD Схема
Поиск этого веб -сайта
Последнее обновление от Swagatam 303 Комментарии
Пост. обсуждает однофазную схему частотно-регулируемого привода или схему частотно-регулируемого привода для управления скоростью двигателя переменного тока, не влияя на их рабочие характеристики.
обсуждает однофазную схему частотно-регулируемого привода или схему частотно-регулируемого привода для управления скоростью двигателя переменного тока, не влияя на их рабочие характеристики.
Двигатели и другие подобные индуктивные нагрузки особенно не «любят» работать на частотах, которые могут не соответствовать их производственным спецификациям, и, как правило, становятся очень неэффективными, если вынуждены работать в таких ненормальных условиях.
Например, двигатель, предназначенный для работы с частотой 60 Гц, не рекомендуется для работы с частотой 50 Гц или другими диапазонами.
Это может привести к нежелательным результатам, таким как нагрев двигателя, более низкие или более высокие скорости, чем требуемые, и ненормально высокое потребление, что делает вещи очень неэффективными и сокращает срок службы подключенного устройства.
Однако эксплуатация двигателей в условиях различной входной частоты часто становится вынужденной, и в таких ситуациях частотно-регулируемый привод или схема привода с регулируемой частотой могут оказаться очень удобными.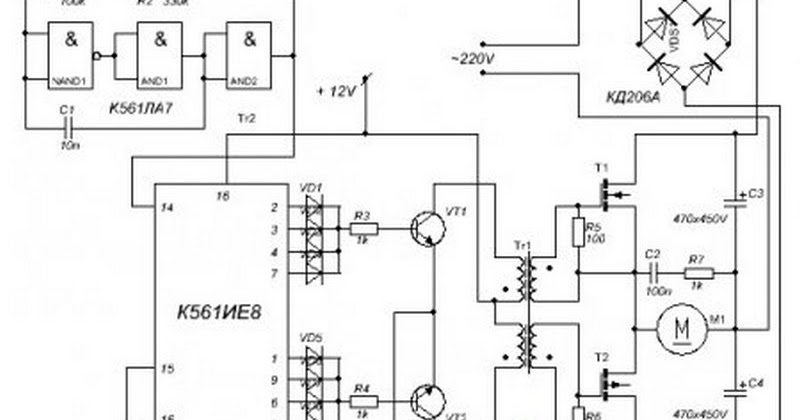
ЧРП — это устройство, которое позволяет пользователю управлять скоростью двигателя переменного тока, регулируя частоту и напряжение входного питания в соответствии со спецификациями двигателя.
Это также означает, что частотно-регулируемый привод позволяет нам управлять любым двигателем переменного тока через любой доступный сетевой источник переменного тока, независимо от его характеристик напряжения и частоты, путем соответствующей настройки частоты и напряжения частотно-регулируемого привода в соответствии со спецификациями двигателя.
Обычно это делается с использованием данного элемента управления в виде ручки переменной шкалы с различной калибровкой частоты.
Изготовление частотно-регулируемого привода в домашних условиях может показаться сложной задачей, однако взгляд на предложенную ниже конструкцию показывает, что в конце концов не так уж и сложно создать это очень полезное устройство (разработанное мной).
Работа схемы Схема может быть разделена на два основных этапа: каскад драйвера полумоста и каскад логического генератора ШИМ.
Драйвер полумоста использует микросхему драйвера полумоста IR2110, которая в одиночку заботится о каскаде привода высоковольтного двигателя, включающем два полевых МОП-транзистора на стороне высокого и низкого напряжения соответственно.
Таким образом, микросхема драйвера образует сердце схемы, но для реализации этой важной функции требуется всего несколько компонентов.
Вышеупомянутая ИС, однако, потребует высокой логики и низкой логики в частотах для управления подключенной нагрузкой на желаемой конкретной частоте.
Эти входные логические сигналы высокого и низкого уровня становятся рабочими данными для драйвера IC и должны включать в себя сигналы для определения заданной частоты, а также ШИМ в фазе с сетью переменного тока.
Приведенная выше информация создается другим каскадом, состоящим из пары микросхем 555 и счетчика декад. ИК 4017.
Две микросхемы 555 отвечают за генерацию модифицированных синусоидальных ШИМ, соответствующих полному колебанию переменного тока, полученному на выходе мостового выпрямителя.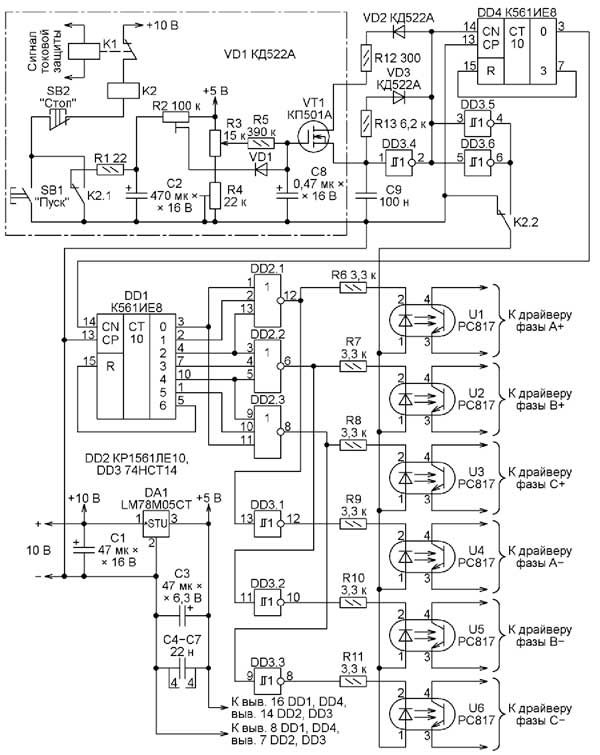
IC4017 функционирует как выходной логический генератор тотемного полюса, частота переменного тока которого становится ГЛАВНЫМ параметром, определяющим частоту схемы.
Эта определяющая частота берется с вывода №3 микросхемы IC1, который также питает вывод триггера IC2 и для создания модифицированных ШИМ на выводе №3 микросхемы IC2.
Модифицированные синусоидальные ШИМ сканируются на выходах ИС 4017 перед подачей на IR2110, чтобы наложить точную «печать» модифицированных ШИМ на выходе драйвера полумоста и, в конечном итоге, для работающего двигателя.
Cx и значения потенциометра 180k должны быть соответствующим образом выбраны или отрегулированы, чтобы обеспечить правильную заданную частоту для двигателя.
Высокое напряжение на стоке MOSFET на стороне высокого напряжения также должно быть рассчитано соответствующим образом и получено путем выпрямления доступного сетевого напряжения переменного тока после соответствующего повышения или понижения его в соответствии со спецификациями двигателя.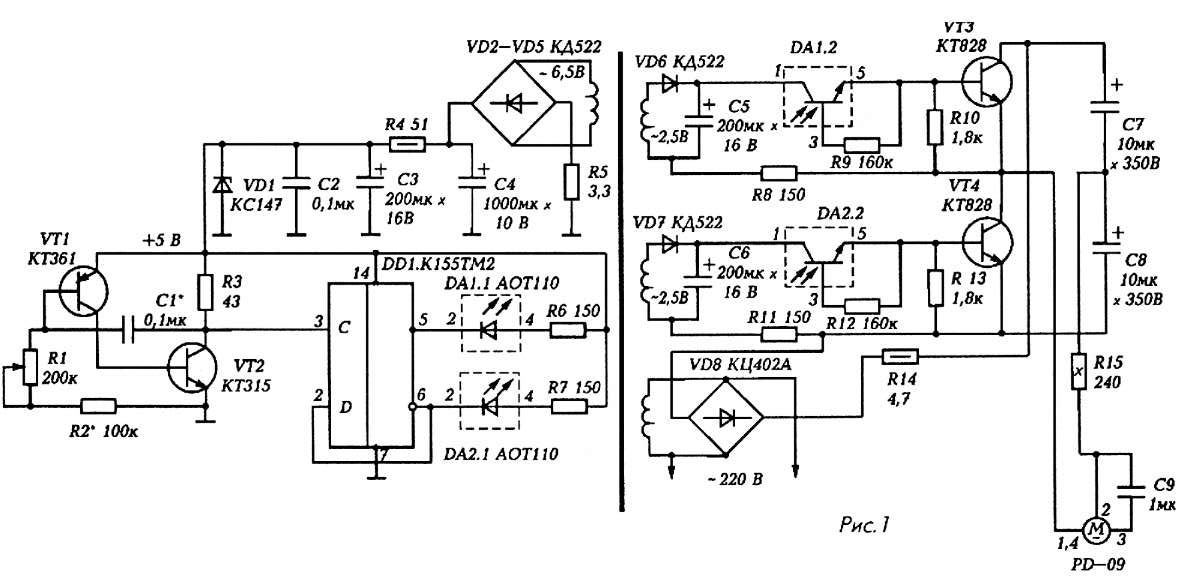
Вышеупомянутые настройки определяют правильное значение вольт на герц (В/Гц) для конкретного двигателя.
Напряжение питания для обеих ступеней может быть объединено в общую линию, то же самое и для заземления.
TR1 — понижающий трансформатор 0–12 В/100 мА, который обеспечивает необходимые рабочие напряжения питания цепей.
Схема ШИМ-контроллера
Вам необходимо соответствующим образом интегрировать выходы микросхемы IC 4017 на приведенной выше схеме с входами HIN и LIN на следующей схеме. Кроме того, соедините диоды 1N4148, указанные на приведенной выше схеме, с затворами MOSFET нижнего плеча, как показано на приведенной ниже схеме.
Драйвер двигателя с полным мостом
Обновление:
Обсужденную выше простую конструкцию с одним частотно-регулируемым приводом можно еще больше упростить и улучшить, используя автоколебательную полную мостовую ИС IRS2453, как показано ниже:
Здесь IC 4017 полностью устраняется, поскольку драйвер полного моста оснащен собственным каскадом генератора, и поэтому для этой ИС не требуется внешнего запуска.
Будучи полностью мостовой конструкцией, управление выходом двигателя имеет полный диапазон регулировки скорости от нуля до максимальной.
Потенциометр на выводе №5 микросхемы 2 можно использовать для управления скоростью и крутящим моментом двигателя с помощью метода ШИМ.
Для управления скоростью В/Гц значения Rt/Ct, связанные с IRS2453, и R1, связанные с IC1, можно соответственно настроить (вручную) для получения соответствующих результатов.
Еще больше упрощения
Предупреждение: 310 В показано ошибочно. Напряжение питания на клеммах истока P-канальных МОП-транзисторов не может быть выше, чем их напряжение затвора. Поскольку микросхема 4017 может обеспечить максимальное напряжение затвора 15 В, 310 В необходимо заменить на 15 В постоянного тока, иначе полевые МОП-транзисторы сгорят. Если вы хотите использовать 310 В, то всю конфигурацию MOSFET следует заменить конфигурацией с самозагрузкой.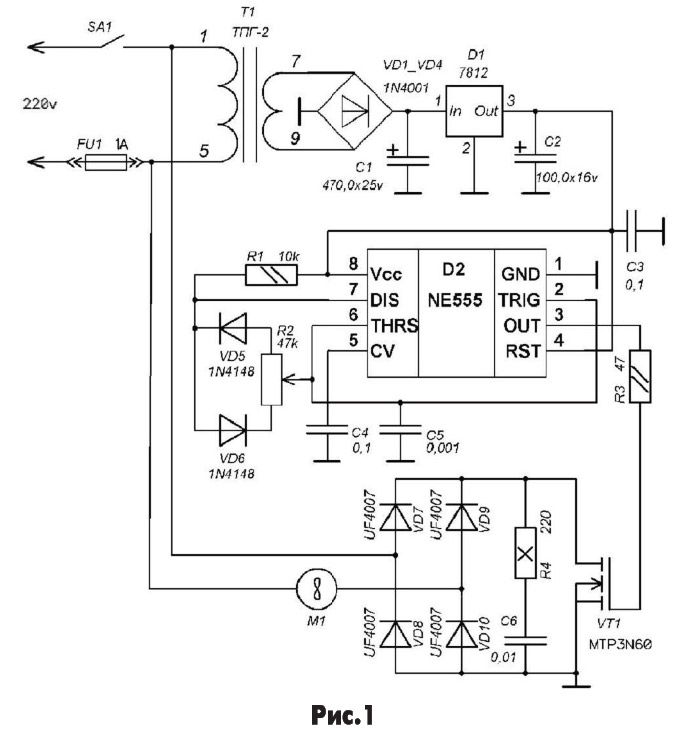
Если полная мостовая секция кажется вам чрезмерной, вы можете заменить ее полной мостовой схемой на основе P, N-MOSFET, как показано ниже. В этом драйвере с переменной частотой используется та же концепция, за исключением секции драйвера полного моста, в которой используются P-канальные МОП-транзисторы на стороне высокого напряжения и N-канальные МОП-транзисторы на стороне низкого напряжения.
Хотя конфигурация может выглядеть неэффективной из-за использования P-канальных MOSFET (из-за их высокого рейтинга RDSON), использование множества параллельных P-MOSFET может показаться эффективным подходом к решению проблемы низкого RDSON.
Здесь 3 МОП-транзистора используются параллельно для устройств с P-каналом, чтобы обеспечить минимальный нагрев устройств наравне с аналогами с N-каналами.
О компании Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем/печатных плат, производитель. Я также являюсь основателем веб-сайта: https://www.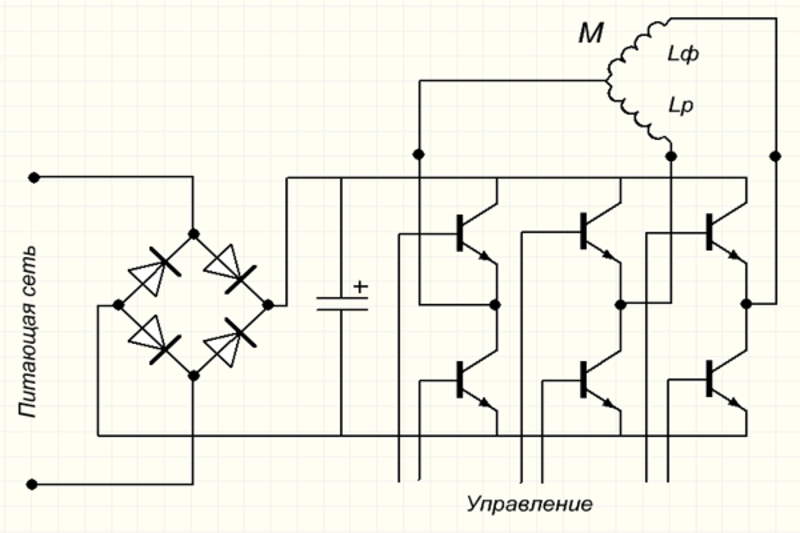 homemade-circuits.com/, где я люблю делиться своими инновационными схемами и учебными пособиями.
homemade-circuits.com/, где я люблю делиться своими инновационными схемами и учебными пособиями.
Если у вас есть какие-либо вопросы, связанные со схемой, вы можете ответить через комментарии, я буду очень рад помочь!
Введение в установку и настройку двигателя с постоянными магнитами с ЧРП
Цели обучения
- Сравнение асинхронных двигателей с двигателями с постоянными магнитами.
- Проверка выбора, программирования и настройки частотно-регулируемого привода для двигателей с постоянными магнитами.
- Узнайте, как проверить работу двигателя с постоянными магнитами после установки и автоматической настройки ЧРП.
Конструкции асинхронного двигателя (IM) и двигателя с постоянными магнитами (PM) различаются, включая использование в них частотно-регулируемых приводов (VFD). Асинхронные двигатели спроектированы таким образом, чтобы они могли работать с питанием от сети с постоянной скоростью. Двигатель с постоянными магнитами не предназначен для работы через линию. Для двигателя с постоянными магнитами требуется частотно-регулируемый привод, обеспечивающий правильный выходной сигнал для эффективной работы двигателя с постоянными магнитами.
Для двигателя с постоянными магнитами требуется частотно-регулируемый привод, обеспечивающий правильный выходной сигнал для эффективной работы двигателя с постоянными магнитами.
Асинхронные двигатели по сравнению с двигателями с постоянными магнитами
Важно понимать конструктивные различия между двигателями с асинхронными и постоянными магнитами, чтобы надлежащим образом управлять каждым из них с помощью частотно-регулируемого привода и выбирать наиболее подходящий двигатель и привод для применения. См. рисунок, таблицу 1 и рисунок 2, на которых показаны кривые крутящего момента для асинхронного двигателя в сравнении с двигателем с постоянными магнитами.
Рис. 1, Таблица 1: Понимание конструктивных различий асинхронного двигателя (АД) и двигателя с постоянными магнитами (ПМ) помогает при выборе, применении и использовании двигателя и преобразователя частоты. Предоставлено: Яскава
- Асинхронный двигатель — это асинхронный двигатель, в котором для создания крутящего момента требуется скольжение.
 Скорость двигателя – это разница между заданной частотой и частотой скольжения. Крутящий момент двигателя зависит от частоты скольжения (зеленый).
Скорость двигателя – это разница между заданной частотой и частотой скольжения. Крутящий момент двигателя зависит от частоты скольжения (зеленый). - Двигатель с постоянными магнитами — это синхронный двигатель, в котором скорость двигателя равна частоте, заданной частотно-регулируемым приводом, а крутящий момент может быть создан только при синхронизированной скорости (синий).
Асинхронные двигатели и двигатели с постоянными магнитами различаются по размеру. Конструкция двигателя с постоянными магнитами более компактна и эффективна, чем асинхронный двигатель, поскольку ротор содержит магниты. Поскольку двигатель с постоянными магнитами уже создал магнитное поле, доступен мгновенный и постоянный крутящий момент. Ротор АД намотан и требует индукции от поля статора для создания магнитного поля ротора.
Двигатели с постоянными магнитами более сложны, и для их работы требуется запрограммированный частотно-регулируемый привод.
Рис. 2. Асинхронному двигателю (асинхронному двигателю) для создания крутящего момента требуется скольжение. Скорость двигателя – это разница между заданной частотой и частотой скольжения. Крутящий момент двигателя зависит от частоты скольжения (зеленый). Двигатель с постоянными магнитами (ПМ) — это синхронный двигатель, скорость которого равна частоте, заданной ЧРП. Крутящий момент может быть создан только при синхронизированной скорости (синий). Предоставлено: Яскава
Скорость двигателя – это разница между заданной частотой и частотой скольжения. Крутящий момент двигателя зависит от частоты скольжения (зеленый). Двигатель с постоянными магнитами (ПМ) — это синхронный двигатель, скорость которого равна частоте, заданной ЧРП. Крутящий момент может быть создан только при синхронизированной скорости (синий). Предоставлено: Яскава
Данные двигателя с постоянными магнитами, электродвижущая сила
Ключевым компонентом двигателя с постоянными магнитами является знание противо-ЭДС (электродвижущей силы). Двигатель с постоянными магнитами естественно генерирует напряжение, вращая двигатель, как генератор. Напряжение противо-ЭДС измеряется в вольтах на 1000 оборотов в минуту (В/кр/мин). Это значение часто указывается на паспортной табличке двигателя при настройке и настройке ЧРП (рис. 3).
Рис. 3. Двигатель с постоянными магнитами (ПМ) может генерировать напряжение за счет вращения, подобно генератору. При настройке и настройке преобразователя частоты двигателя с постоянными магнитами важно знать значение генерируемого двигателем напряжения, известного как противоэлектродвижущая сила (ЭДС). Напряжение противо-ЭДС измеряется в вольтах на 1000 об/мин (В/коб/мин) и часто указывается на паспортной табличке двигателя. Предоставлено: Яскава
Напряжение противо-ЭДС измеряется в вольтах на 1000 об/мин (В/коб/мин) и часто указывается на паспортной табличке двигателя. Предоставлено: Яскава
Другими ключевыми компонентами являются сопротивление статора двигателя с постоянными магнитами и значения индуктивности Ld и Lq (показывающие пути индуктивности). Индуктивности Ld и Lq представляют собой две координаты векторного управления, которые обычно отстоят друг от друга на 90 градусов. Ток, протекающий через Ld, определяет управление магнитным полем. Ток, протекающий через Lq, определяет создание крутящего момента (рис. 4).
Рис. 4. Ключевыми компонентами постоянного магнита (ПМ) являются сопротивление статора двигателя и значения индуктивности Ld и Lq (с указанием путей индуктивности). Индуктивности Ld и Lq представляют собой две координаты векторного управления, которые обычно равны 90 градусов друг от друга. Ток, протекающий через Ld (справа), определяет управление магнитным полем. Ток через Lq (внизу) определяет создание крутящего момента. Предоставлено: Yaskawa
Предоставлено: Yaskawa
Пример настройки ЧРП двигателя с постоянными магнитами, настройка
Далее следует пример настройки и настройки ЧРП для работы двигателя с постоянными магнитами в приложении с вентилятором. Перед настройкой и настройкой привода необходимо 10 элементов информации, как показано в Таблице 2.
Таблица 2: Перед настройкой и настройкой привода необходимо 10 элементов информации, как показано. Предоставлено: Яскава
Это номер модели двигателя, номинальная мощность двигателя (л.с.), номинальное напряжение двигателя (В переменного тока), номинальная частота двигателя (Гц), номинальный ток двигателя (А), число полюсов двигателя, сопротивление статора двигателя (Ом) , индуктивность Ld (мГн), индуктивность Lq (мГн) и обратная ЭДС (В/об/мин). Если эти данные отсутствуют на паспортной табличке двигателя, обратитесь к производителю двигателя.
Выбор частотно-регулируемого привода, программирование, настройка для двигателей с постоянными магнитами
Выбранный частотно-регулируемый привод должен обеспечивать надлежащий ток и напряжение для выбранного двигателя.
Как видно из паспортной таблички двигателя, напряжение может быть 230 В переменного тока или 460 В переменного тока, и для каждого из них также указаны токи. Для этого примера используйте 230 В переменного тока с током 6,7 А. Эта модель частотно-регулируемого привода, выбранная здесь из таблицы, является подходящей.
При программировании частотно-регулируемого привода начните с выбора метода управления. Это настроит привод на параметры, которые нужно будет ввести со значениями с заводской таблички и формы (таблица 2). На рис. 6 (первый экран ЧРП) показан двигатель с постоянными магнитами в выбранном векторном режиме без обратной связи. Приложение представляет собой нагнетательный вентилятор и не требует обратной связи, такой как энкодер для обратной связи скорости двигателя с ЧРП. Таким образом, это открытый режим.
Рис. 5. В показанном примере преобразователь частоты Yaskawa (ЧРП) используется для работы двигателя с постоянными магнитами (ПМ). В этом случае двигатель подключается к вентилятору. Модель частотно-регулируемого привода, выбранная из таблицы, подходит для двигателя с напряжением 230 В переменного тока и током 6,7 А. Предоставлено: Yaskawa
Модель частотно-регулируемого привода, выбранная из таблицы, подходит для двигателя с напряжением 230 В переменного тока и током 6,7 А. Предоставлено: Yaskawa
На рис. 6 (следующие экраны) перейдите к разделу настройки, чтобы ввести оставшиеся данные, собранные с двигателя.
Рис. 6. На первом экране ЧРП показан двигатель с постоянными магнитами в выбранном векторном режиме без обратной связи. Приложение представляет собой вентилятор и не требует обратной связи, поэтому оно работает в режиме разомкнутого цикла. На следующих экранах перейдите к разделу настройки, чтобы ввести оставшиеся данные, собранные с двигателя. Предоставлено: Яскава
Существуют различные методы автонастройки. Процесс настройки позволяет частотно-регулируемому приводу вычислять и оптимизировать значения для более точного соответствия характеристикам двигателя. Информация в техпаспорте известна, так что это не столько тюнинг, сколько ввод информации о моторе.
В некоторых случаях некоторая информация может быть недоступна. Если это так, его можно рассчитать с помощью ЧРП, зная хотя бы минимум. В случае стационарных методов привод может рассчитывать только Ld, Lq и R (сопротивление) или R. Но в любом случае требуется противоЭДС. Эти стационарные автонастройки не вращают двигатель. Они предпочтительнее, если двигатель уже подключен к устройству и не может быть легко удален. Методы автонастройки с вращением требуют, чтобы двигатель вращался свободно или был отсоединен от устройства.
Если это так, его можно рассчитать с помощью ЧРП, зная хотя бы минимум. В случае стационарных методов привод может рассчитывать только Ld, Lq и R (сопротивление) или R. Но в любом случае требуется противоЭДС. Эти стационарные автонастройки не вращают двигатель. Они предпочтительнее, если двигатель уже подключен к устройству и не может быть легко удален. Методы автонастройки с вращением требуют, чтобы двигатель вращался свободно или был отсоединен от устройства.
Если обратная ЭДС неизвестна, необходимо выполнить автоматическую настройку вращения. Это будет вращать двигатель. При автонастройке с вращением любая нагрузка должна быть отключена от вала двигателя, чтобы обеспечить расчет только для двигателя. Дополнительная нагрузка исказит расчеты.
ЧРП также необходимо выравнивать положение ротора при каждом запуске. Это также делается во время начальной автоматической настройки. ЧРП может подавать ток или высокую частоту в статор двигателя, чтобы найти магнитный полюс ротора. При использовании системы с обратной связью устройство обратной связи энкодера используется в качестве точки отсчета.
При использовании системы с обратной связью устройство обратной связи энкодера используется в качестве точки отсчета.
В этом примере (рис. 7) при использовании метода втягивания в статор подается постоянный ток. Это создает притяжение к ближайшему полюсу.
Рис. 7: ЧРП также необходимо выравнивать положение ротора при каждом запуске. Это также делается во время начальной автоматической настройки. Используя метод втягивания, частотно-регулируемый привод подает постоянный ток в статор. Это создает притяжение к ближайшему полюсу. Предоставлено: Yaskawa
После настройки ЧРП и автонастройки проверьте работу двигателя с постоянными магнитами
После завершения настройки и успешной автонастройки проверьте двигатель отдельно и подключите его к приложению на предмет производительности и направления.
Если направление вращения двигателя неправильное, возможно неправильное подключение проводов двигателя. Чтобы исправить это, отключите питание и поменяйте местами любые два из трех выводов двигателя (рис.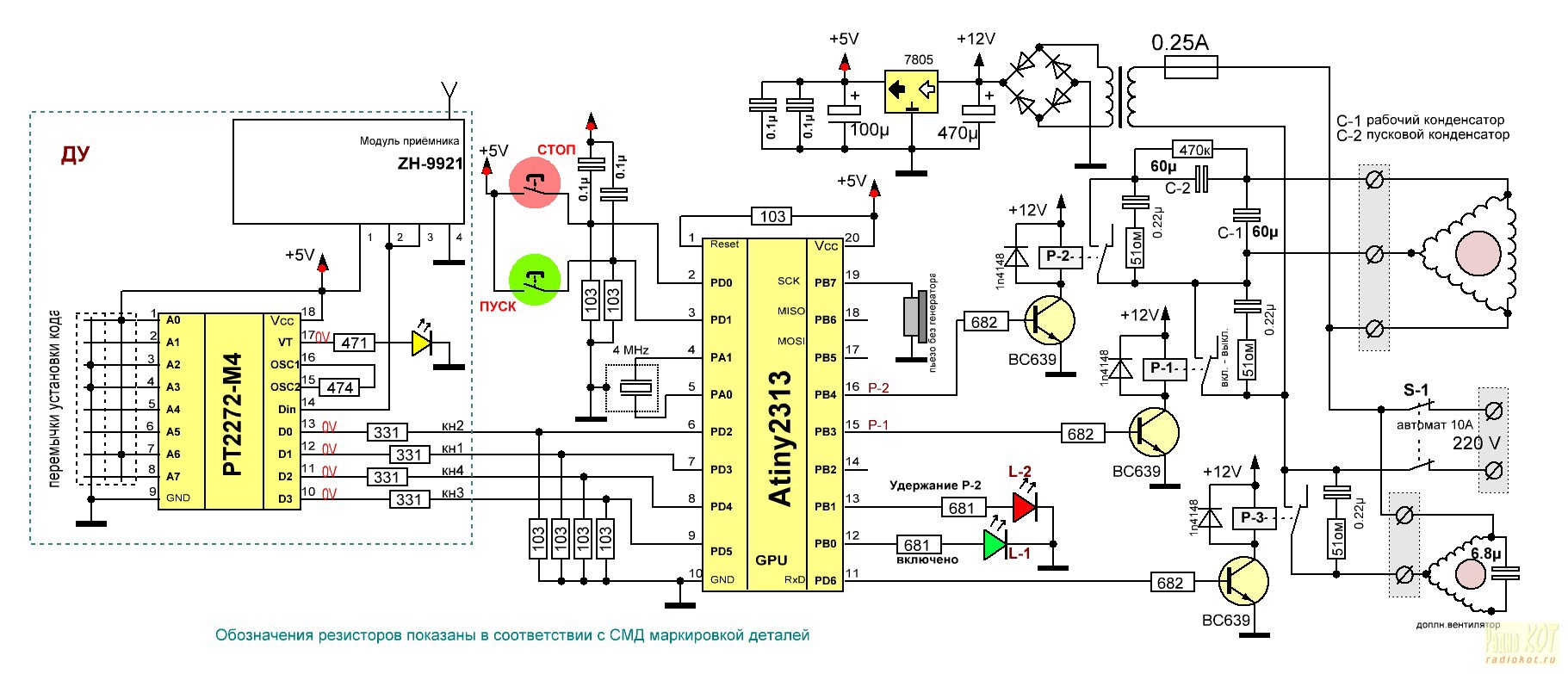 8).
8).
Рис. 8: Если направление вращения двигателя неправильное, провода двигателя могут быть неправильно подключены. Если это так, отключите питание и поменяйте местами любые два из трех проводов двигателя. Предоставлено: Yaskawa
Возможно, полюса двигателя были ближе к магниту в противоположном направлении, чем в прямом. Это нормально. Если возникают непрерывные колебания или в приводе появляется возможный ступенчатый отказ двигателя, может потребоваться дополнительная настройка параметров Ld и Lq для более точной настройки. Использование высокочастотного метода может быть лучше, если реверс не разрешен для приложения.
Двигатели с постоянными магнитами более сложны, чем асинхронные двигатели, и их установка и настройка может занять немного больше времени. Для этого также может потребоваться обратиться к производителю частотно-регулируемого привода для получения дополнительной помощи и более подходящих настроек параметров.
Роберт Бонцар — инженер по обучению продукции, Yaskawa America Inc.