
Управляющая плата MKS Gen L и дисплей MKS TFT24 для модернизации 3D принтера
Очередной виток модернизации 3D печатающего друга.Под горячую руку попалась самая главная часть — управляющая плата.
Для замены выбрал новую MKS Gen_L, как поддерживающую 2й экструдер, внешние драйверы шаговиков, а также подключение дисплея MKS TFT24
Небольшой отчет о покупке запчастей для 3Д принтера на торговой площадке Таобао.
Совсем недавно открыл для себя массу интересных вещей, которых или нет на Али, или на Али стоят подороже.
И вот фотографии платы управления и дисплея для 3Д принтера из первой посылки с Тао.
P.s. на Тао выгодно покупать, но большими посылками. В розницу проще затариться на Али или Ebay.
А вот как раз покупка наборов запчастей и комплектующих выгодна именно на Таобао, так как получается дешевле, местами разница очень заметна.
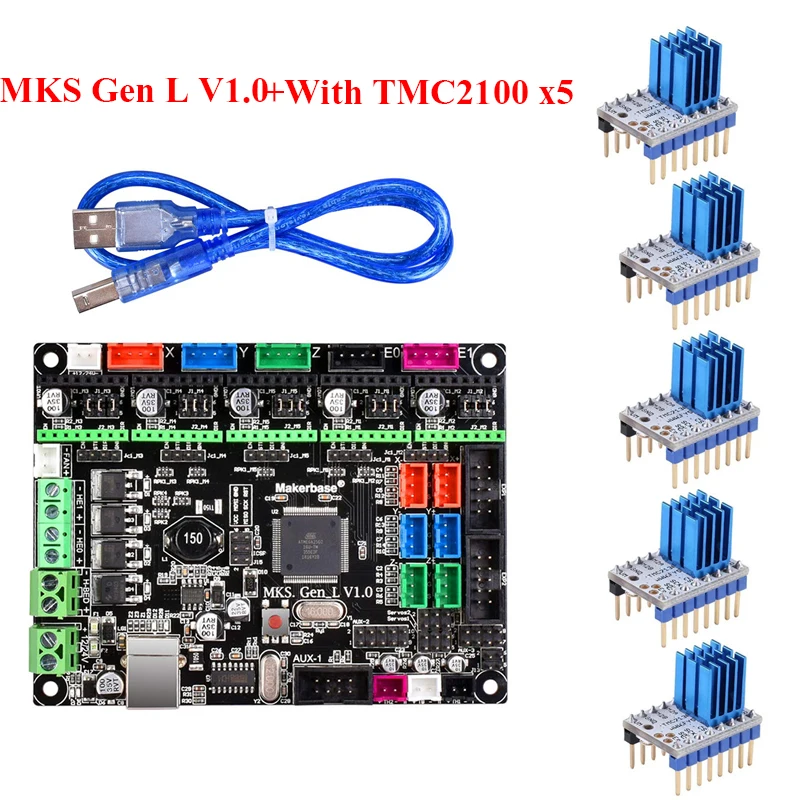
Итак, для апгрейда «бутерброда» с Ramps выбрал плату MKS Gen L, как одну из самых оптимальных по соотношению цена/качество.
Стоимость MКS Gen L составляет ¥ 79.00 (около $12). За услуги посредник берет себе 10% (оформление заказа, покупка, оплата, оформление товара на склад посредника). Плюсом идет местная доставка.
Плата 8-битная, на ней стоит ATmega2560, как и на Ramps, из плюсов — формфактор и несколько другие компоненты.
Самое главное — я теперь могу подключить второй экструдер (на фото Е2 мотор), а также установить дисплей MKS TFT через AUX-1
Основное преимущество подобной платы: можно выбирать различные драйверы и устанавливать в необходимой комбинации под двигатели (да здравствует тишина, да пропадут пропуски).
Характеристики:
Бренд: MKS
Модель: MKS GEN_L
Количество слотов для шаговых драйверов: 5
Количество выходов на экструдеры: 2
Напряжение питания: 12В/24В
Интерфейсы для дисплеев: EXP1/2 для 2004/12864 и AUX-1 для MKS TFT
Возможность подключения сервоприводов: Да.
Небольшая иллюстрация из описания характеристик
На плате используются мощные транзисторы
Пришла плата в составе большой посылки, сама упакована в антистатический пакет (все лишнее я удалял при перепаковке)
Внешний вид платы
Маркировка MKS GEN_L 1.0, разъем AUX-1 для подключения дисплея от MKS, также на фото видны AUX2, servo и т.п.
Колодки для драйверов, джамперы. Приятно, что есть выход для второго экструдера. Если вдруг нужен третий/четвертый — обычно ставят расширители (expander — плата коммутатор приводов экструдеров), но это редкость.
Силовые клеммы и USB-B
Мосфеты: один РН3403 на стол (30V/140A), и три HY1403 (30V-42A) на нагреватели хотэндов и венлиляторы (N-Channel Enhancement Mode MOSFET)
Чип Атмеги 2560
Размеры
Дополнительная информация — установочные и габаритные размеры
Масса
Фото сравнение с Ramps
Теперь несколько слов про MKS TFT24
Ну во-первых, есть три версии цветных сенсорных дисплеев от MKS. Это TFT24, TFT28 и TFT32. Последний, хоть и большой, но требует отдельного модуля картдридера (SD) для удобства монтажа в корпус.
Дисплей TFT24 — самый недорогой из серии, и при этом сохраняет полную функциональность. На плате есть кардридер SD карточек, что упрощает сборку принтера.
Стоимость MКS Gen L составляет ¥ 99.00 (около $15).
Что касается контроллера — установленный STM32F103 в разы мощнее чипа ATMega2560, который установлен на основной плате.
Характеристики:
Бренд: MKS
Модель: MKS TFT24
Размер дисплея: 2,4″
Цветность: Да
Тип: сенсорный
Возможность подключения Wi-Fi модуля: Да
Небольшая иллюстрация из описания характеристик
На настоящий момент существует несколько типов интерфейсов, но обычно используют «заточенные» прошивки (ниже будут ссылки, в том числе и на русскую)
Кстати, к нему можно подключить WiFi модуль — предусмотрен разъем.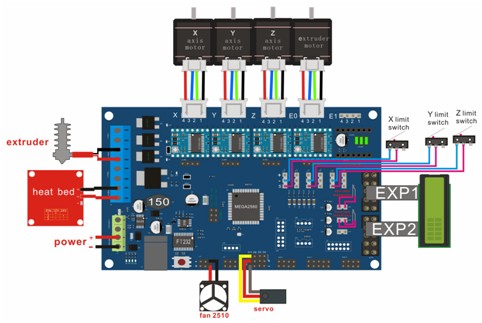 Ссылки на W-Fi модули в конце обзора
Ссылки на W-Fi модули в конце обзора
Также пришло все в одной посылке. Дисплей — в антистатической упаковке, внутри пупырчатая пленка.
Шлейф в комплекте
Присутствует защитная пленка на экране
На фотографии видно модуль кардридера
Видно обозначение контактов модуля картдирера, а также фирменное лого
Кардридер сделан под углом к плате, что позволяет предусматривать прорезь в корпусе рядом с окном дисплея, что очень удобно
Также, на дисплее есть «пищалка»
Чип STM32F103
Размер модуля дисплея
Масса
Кабель из комплекта длиной почти 60 см, что позволяет размещать дисплея достаточно далеко от платы
Фото сравнение с 2004 дисплеем
Устанавливаем драйверы на плату, не забываем отрегулировать ток
Табличка установки джамперов драйверов для выбора микрошага
На всякий случай — распиновка платы
Отдельно — распиновка коннекторов EXP1/EPX2
Первое включение
Прошивка стоит китайская, можно взять английскую версию на гитхабе
Настройка как таковая не сложная, просто выбираем в прошивке тип платы как и Ramps (в марлине 33/34)
Вот так выглядит отверстие под дисплей с кардридером
Плата в принтере (фанеро-H-бот)
Собственно говоря все, комплектующие ждут выходных (или отпуска), чтобы оттестироваться вместе с железом.
Теперь небольшая информация про посредника и покупки.
Пользовался услугами посредника Yoybuy
При регистрации на первую покупку выдается купон на скидку $10 для заказов от $50, чем и воспользовался, только купон валидный небольшое время (около 7-10 дней)
Процесс заказа простой до безобразия. Копируете адрес выбранного лота из Таобао в поисковую строку посредника (Add URL), отмечаете необходимые опции, количество (при желании — можно оставить комментарий), кладете в корзину. На этом этапе стоимость увеличивается на 10% — это комиссия посредника за сервис BuyForMe. Так же за каждую местную посылку берется $1.9 (Domestic shipping). Так что лучше выбирать товары из одного магазина, тогда этот сбор оплачивается только один раз.
Копируете адрес выбранного лота из Таобао в поисковую строку посредника (Add URL), отмечаете необходимые опции, количество (при желании — можно оставить комментарий), кладете в корзину. На этом этапе стоимость увеличивается на 10% — это комиссия посредника за сервис BuyForMe. Так же за каждую местную посылку берется $1.9 (Domestic shipping). Так что лучше выбирать товары из одного магазина, тогда этот сбор оплачивается только один раз.
Что касается стекол/хрупких товаров/«брендовых» товаров — их нельзя оплатить PayPal. В остальном ограничений нет.
Ну и при упаковке попросил дополнительно замотать стекла во избежание…
Далее при получении посылки на склад можно объединить в одну (перепаковать, сфотографировать) оформлять пересылку себе.
У меня доставка запчастей для принтера обошлась около $19 (пересылка карго), так как масса не более 2кг.
Для расчета стоимости доставки можно воспользоваться калькулятором
Ссылки на лоты для 3д принтера:
Прямая ссылка на плату MKS GEN L и через посредника ($12.54 )
Прямая ссылка на MKS TFT24 и через посредника ($15.71 )
Неплохая альтернатива этому дисплею (особенно если не нужен сенсорный) — это MKS MINI12864 LCD display
Прямая ссылка на MKS MINI12864LCD display и через посредника ($7.78)
Прямая ссылка на Драйверы TMC2208 и через посредника ($7.94)
Прямая ссылка на двигатели 17HS8401S и через посредника ($4.44 )
Прямая ссылка на драйверы TMC2130 и через посредника ($7.94 )
Прямая ссылка на драйверы TMC2100 и через посредника ($6.79 ) — старая версия стоит чуть дешевле
Прямая ссылка на модуль MOS-твертодельное реле для нагревательного стола и через посредника ($6.32 )
Прямая ссылка на Датчик Z-probe на пленках и через посредника ($2.68 )
PEI листы и через посредника ($2.68) — обычная гораздо выше
Различные ништяки от MKS — я себе не брал, но возможно пригодится докинуть в корзину
Прямая ссылка на MKS HLKWIFI модуль и через посредника ($14.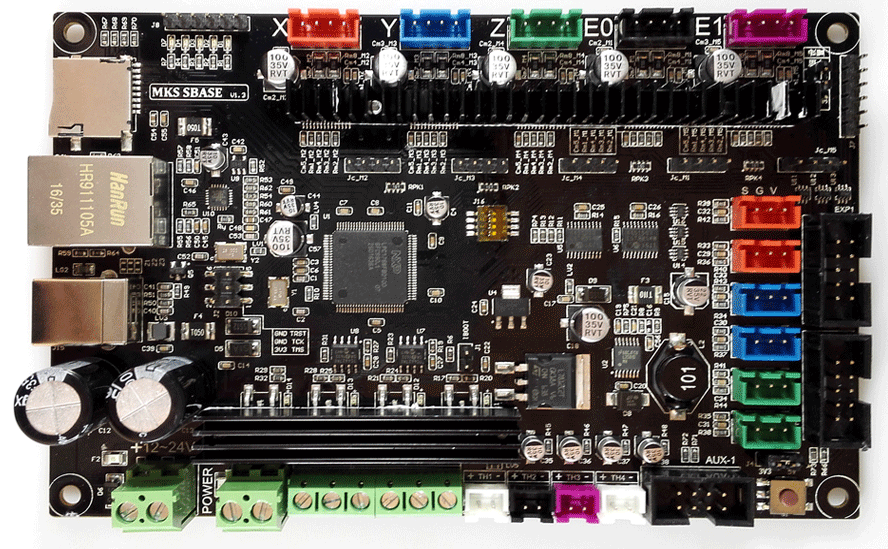 29 )
29 )
Прямая ссылка на MKS PWC модуль и через посредника ($9.37 )
Прямая ссылка на MKS TFT WIFI модуль и через посредника ($5.56 )
А вот хотэнд я взял CR8. На Тао его не нашел (обсуждение)
Магазин Anycubic
Магазин с запчастями для 3д принтеров и электроникой
Ссылки на софт:
tieba.baidu.com/makerbase
github.com/makerbase-mks
flyway97.blog.163.com/
Сайт производителя
Обзоры и статьи по теме:
3dtoday.ru/blogs/eta4ever/the-display-which-is-smarter-printer-mks-tft28-1/
3dtoday.ru/blogs/eta4ever/the-display-which-is-smarter-printer-mks-tft28-2/
3dtoday.ru/blogs/eta4ever/mks-tft28-3-mksdet-marlin-fishing-on-a-sniffer/
3dtoday.ru/blogs/nioz/russian-firmware-mks-tft/
robotrebels.org
3D модели корпусов для платы
Выбор и настройка драйвера шагового двигателя
Данный цикл статей относится к настройке шаговых двигателей — с данной задаче сталкивается любой ЧПУ-шник. Для базы мы будем брать настройку драйверов для 3D-принтера, но по факту правила подойдут к любому станку. Итак, поехали.
ОГЛАВЛЕНИЕ
- Часть 1 — Вводная статья, выбор драйвера шагового двигателя
- Часть 2 — Подключения драйверов к различным платам:
- Часть 2.1 Установка перемычек на платы RAMPS и MKS GEN L в режиме DIR STEP
- Часть 2.2 Установка перемычек на платы MKS SGEN L, BIGTREETECH SKR в режиме DIR STEP
- Часть 2.3 Режимы SPI и UART (в процессе написания)
- Часть 3 — Настройка VRef (в процессе написания)
- Часть 4 — UART (в процессе написания)
- Часть 5 — обзор самых популярных драйверов (в процессе написания)
1. ВЫБОР ДРАЙВЕРА ШАГОВОГО ДВИГАТЕЛЯ
На что необходимо обратить внимание при выборе шагового двигателя:
- Режим его работы. Например, для осей X и Y степень вовлеченности шаговика будет максимальной (т.
- Место использования. Тут всё просто — каковы ваши требования в части тишины. Если вы находитесь в производственном помещении, то требования к шуму будут небольшие. Если дома в отдельной комнате, то средние. Если в спальной — максимальные.
- Используемые двигатели. Данный пункт предполагает прямую зависимость по потреблению тока в ШД. Для мощных двигателей не подойдут слабые драйвера. И, конечно, слабым движкам нет никакой необходимости ставить «взрослые» драйвера.
- Точность позиционирования (или микрошаг). С одной стороны этот параметр показывает сколько необходимо сделать микрошагов на один полный шаг (1.8 градусов поворота вала или, иногда, 0.9) и по сути определяет точность. Кроме того, это понижает шум, снижает резонансы и увеличивает плавность движения. Но тут палка о двух концах — чем больше микрошагов, тем слабее момент удержания. Чтобы представить себе этот процесс, попробуйте зажать пальцами движок с режимом 1/16 и 1/256. В первом случае это сделать невозможно. Во втором достаточно легко (момент приблизительно = 1% от номинала). Кроме того, повышение микрошагов дает существенное повышение температуры, а значит мы постепенно приходим к необходимости усиления охлаждения драйверов. Ещё один интересный момент — увеличение количества микрошагов иногда является бессмысленным занятием. Для вала М6 при дроблении 1/16 мы получаем теоретическую точность позиционирования 300нм, что и так является некоторым маразмом для FDM принтеров. Т.е. на точность при выборе микрошага смотреть смысла нет.
Итак, наши варианты:
Ось Z: это самая редко используемая ось в части количества перемещений. А значит шума от неё в любом случае будет мало. Для этой оси всегда подойдет самый простой A4988. Более того, этот драйвер имеет достаточно большой запас по току — стабильные 2А, а значит подойдет не только для стандартного движка 17HS4401 (1.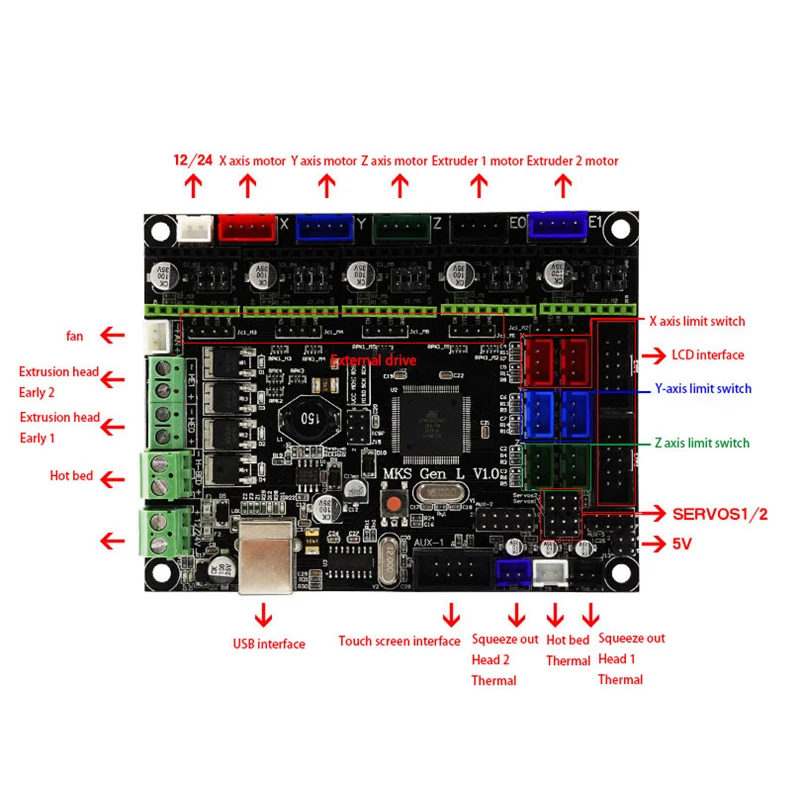 7А), но и для более мощного 17HS8401. Не переплачивайте за драйвера на эту ось! В крайнем случае возьмите DRV8825 в режиме 1/32.
7А), но и для более мощного 17HS8401. Не переплачивайте за драйвера на эту ось! В крайнем случае возьмите DRV8825 в режиме 1/32.
Ось X и Y: Если вам не принципиальны шумы, то берите A4988 (1/16) или DRV8825 в режиме 1/32. Для остальных случаев наша рекомендация TMC2208 или TCM2209 (1/32). Оба движка с запасом по току, но отличаются удивительной тишиной.
Экструдер: самая сложная часть. С одной стороны двигатель по экструдеру используется очень часто, а с другой стороны в основном эти движения крайне плавные. Исключение — ретракты. Если у вас боуден, то ретракты происходят не только часто, но и на большие расстояния (4-7мм). Если директ — на меньшие расстояния. Наш выбор — либо A4988, либо TMC2208/TMC2209 в зависимости от доступного вам бюджета.
2. ПОДКЛЮЧЕНИЕ И НАСТРОЙКА
В вводной статье мы просто опишем основные этапы того, что необходимо сделать. В рамках одной статьи физически не собрать всю информацию. В дальнейшем мы будем описывать правила установки для каждой платы (или серии плат) отдельно.
ВАЖНО: соблюдайте правила подключения, т.к. в противном случае вы спалите управляющую плату!
Перед подключением для начала правильно установите джамперы для установки микрошага. Обратите внимание, что для каждого вида драйвера свой порядок установки джамперов. Например, для драйвера DRV8825 и платы BIGTREETECH SKR 1.3 необходимо использовать следующую таблицу:
Следующим пунктом после установки джамперов является собственно установка самих драйверов. Правило очень простое — необходимо совместить пины драйвера с пинами платы. Как узнать какие пины где находятся? Элементарно — наберите в гугле «НАЗВАНИЕ_ПЛАТЫ PINOUT», выпишите на листке распиновку (достаточно будет выписать пины DIR и EN). Потом наберите «НАЗВАНИЕ_ДРАЙВЕРА PINOUT» и совместите на плате эти пины. Кроме того, можно ориентироваться по направлению подстроечного резистора (расположен на драйвере, похож на головку винта), с помощью которого мы дальше будем регулировать VRef.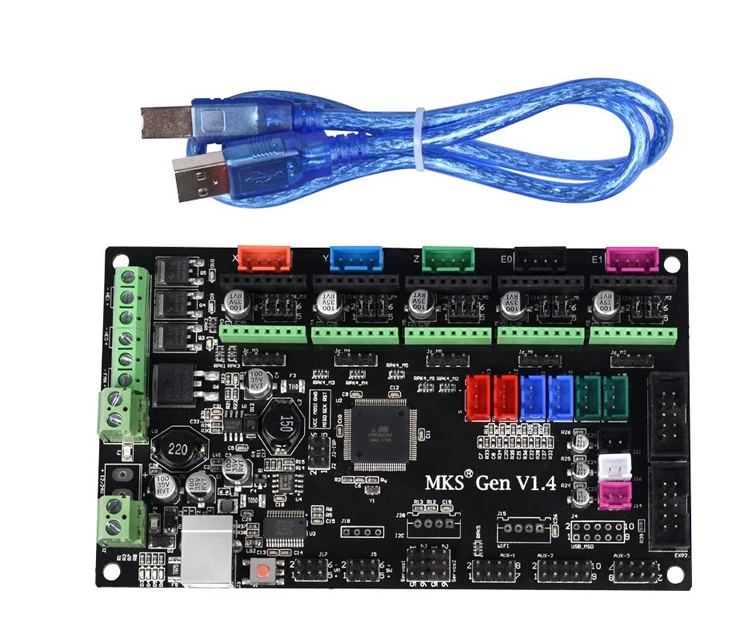
ВАЖНО: Не забудьте поставить на драйвер радиатор, т.к. драйвер — один из самых горячих модулей, а перегрев чреват пропусками шагов.
После установки драйвера необходимо правильно отрегулировать VRef. Это число зависит как от самого драйвера, так и от используемого мотора. Опять же — это отдельная статья. Мы также сделаем таблицу для различных драйверов и моторов. Ну, и последнее, что осталось сделать — при необходимости прописать выбранный драйвер в прошивке.
На сегодня всё, следите за обновлениями нашего блога.
С Уважением, Мастерская робототехники Human & Gears
5 шагов подключения неизвестного электродвигателя
Иногда возникает такая проблема — необходимо подключить электродвигатель в стандартную сеть 380В 50 Гц, но характеристики двигателя неизвестны, поскольку документации к нему нет, а шильдик отсутствует.
Существуют 5 простых шагов, последовательно выполнив которые, можно обеспечить двигатель нужным напряжением питания, защитой и схемой включения.
1. Оцениваем номинальную мощность и ток двигателя
Прежде всего нужно ориентировочно определить мощность электродвигателя. Для этого находим похожий двигатель с известными параметрами, воспользовавшись каталогами производителей. Агрегаты должны совпадать по габаритам и диаметру вала.
На данном этапе мы сможем определить основные параметры для подключения и использования привода – мощность, ток, частоту вращения вала.
2. Определяем напряжение по схеме включения
Следующий шаг — определяем, по какой схеме подключить обмотки и какое напряжение подать. Есть несколько критериев, позволяющих с некоторой вероятностью оценить эти параметры.
Напомним, что промышленные низковольтные двигатели выпускаются с двумя видами напряжений питания: 220/380 В и 380/660 В для схем подключения «Треугольник» и «Звезда», соответственно. На двигатели первого вида можно подавать 380 В, собрав обмотки в схему «Звезда», на приводы второго вида – в «Треугольник».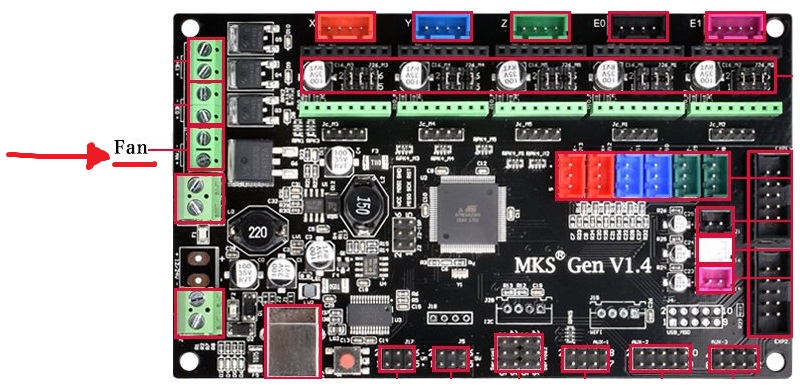
Если электродвигатель новый, то, скорее всего, он собран по схеме, требующей питания 380 В. Именно такую схему обычно используют производители.
Если из двигателя выходит 3 провода, можно сделать вывод, что он имеет стандартное питание 380 В. При этом неважно, по какой схеме агрегат собран внутри. Однако, если в коробке присутствует конденсатор, можно утверждать, что двигатель рассчитан на напряжение 220 В и собран в «Треугольник». Кроме того, мощность в таком случае будет невысокой – не более 2,2 кВт. Для включения такого привода в трехфазную сеть 380 В нужно собрать его по схеме «Звезда».
Если асинхронный двигатель имеет шесть никак не подключенных выводов, определить напряжение питания по схеме включения не получится. В этом случае нужно сначала найти выводы обмоток, затем начало и конец каждой обмотки, чтобы собрать их в одну из схем. Обычно названия обмоток и их начало/конец обозначены.
Электродвигатели мощностью более 5 кВт, как правило, не включают напрямую. Для этого используют преобразователь частоты, устройство плавного пуска, либо схему «Звезда»/«Треугольник».
3. Подаем питание на двигатель
После того, как проведена оценка мощности и выбрана схема включения, можно подавать питание. Первоначально двигатель должен работать в холостом режиме. Питание подается через мотор-автомат и автоматический выключатель. Для включения желательно использовать контактор.
Ориентировочный рабочий ток асинхронного двигателя можно посчитать по эмпирической формуле: I (А) = 2 х P (кВт). То есть, если определено, что мощность двигателя составляет 3 кВт, его номинальный ток будет около 6 А в любой из схем включения.
Номинал мотор-автомата выбирается исходя из определенной ранее мощности. Для холостого хода уставку автомата можно установить в 2 раза меньше номинала, в нашем примере – около 3А. Если автомат выбивает, его уставку увеличивают вплоть до номинала (6 А).
На данном этапе необходимо следить за исправностью двигателя и его температурой, контролировать ток холостого хода токоизмерительными клещами. В холостом режиме двигатель не должен греться при нормальной работе крыльчатки вентилятора. Если нагрев происходит, это может означать, что агрегат неисправен либо нужно изменить схему его включения.
4. Определяем необходимой ток защиты
Номинальный ток и номинальная мощность электродвигателя ограничены его нагревом. Предел рабочей температуры определяется классом изоляции. Максимальная температура обмоток двигателей с низшим классом изоляции (Y) составляет 90°С. На это значение и нужно ориентироваться.
Для определения тока защиты включаем двигатель с номинальной нагрузкой на валу через мотор-автомат с током уставки, определенном на предыдущем шаге. После подачи питания автомат должен отработать по перегрузке. Далее увеличиваем его уставку, при необходимости подключаем автомат с другим диапазоном уставки.
В итоге опытным путем определяем номинал мотор-автомата, уставка которого обеспечивает продолжительную работу двигателя на номинальной нагрузке.
5. Контролируем нагрев обмоток
При работе любого двигателя необходимо периодически контролировать его температуру. В данном случае это особенно важно. Как показывает опыт, болевой порог человеческой руки равен 60°С. Такой способ контроля температуры – самый простой, однако лучшим способом будет использование встроенного термочувствительного элемента.
Заключение
Любой двигатель с неизвестными характеристиками имеет свою историю. Поэтому, прежде чем следовать советам, изложенным в статье, нужно обследовать оборудование либо расспросить персонал о том, где ранее был установлен привод.
Другие полезные материалы:
Трехфазный двигатель в однофазной сети
Эксплуатация электрооборудования вне помещений
Как прозвонить электродвигатель мультиметром
Как рассчитать потребляемую мощность двигателя
Управляющая плата MKS Gen V1.
 2
2Управляющая плата MKS Gen V1.2 разработана для модернизации управления 3D-принтером.
Управляющая плата создана на основе популярного решения – связки платы Arduino Mega 2560 и платы расширения Ramps 1.4, широко используемой для принтеров проекта RepRap.
Плата оснащена 8 битным микроконтроллером ATmega2560, имеет 5 слотов для подключения драйверов шаговых двигателей, возможность подключения питания 12-24 В. Плата MKS GEN 1.2 поддерживает все прошивки Arduino, установка которых проходит в аналогичном порядке.
Преимущества платы MKS Gen v1.2
- Вместо связки двух плат (Arduino + RAMPS) мы имеем одну аккуратную плату управления.
- Возможность подключения источник питания 24 В.
- По сравнении с Ramps 1.4 установлены более мощные MOSFET.
- Поддерживает драйвера шаговых двигателей A4988, Drv8825.
- LCD дисплей подключается напрямую к плате, не используя дополнительный шилд.
Технические характеристики платы MKS GEN V1.2
8 битный микроконтроллер ATmega2560
Напряжение питания 12 — 24 В
Возможность подключения до 5 драйверов шаговых двигателей с простой настройкой микрошага (микропереключатели). 3 шаговых двигателя на оси X,Y ,Z и 2 экструдера Е0, Е1
Поддержка основных драйверов шаговых двигателей A4988, DRV8825, TMC2100, LV8729
Возможность подключения до 3 термисторов (например, 1 — для нагревательного стола, 2 — для первого экструдера, 3 — для второго экструдера)
Шесть 3-х пиновых разъёмов для концевых выключателей Xmin / Xmax / Ymin / Ymax / Zmin / Zmax
Наличие разъема под LCD дисплеи + SD карты
Дополнительные пины для обвязки 3D принтера: AUX-1, AUX-2 (так же как и на Ramps 1.4)
4 мощных MOSFET для питания нагрева стола, двух экструдеров и вентилятора
Подключение платы MKS GEN V1.2
Подключение драйверов шаговых двигателей
Чтобы шаговыми двигателями можно было управлять, нужно поставить по одному драйверу на каждую ось и один драйвер на экструдер.
Прежде чем установить драйвера шаговых двигателей, необходимо выставить микрошаг драйвера. Для установки микрошага драйвера используете джампера (перемычки).
Перемычки установки микрошага на плате MKS GEN V1.2 находятся под драйверами шаговых двигателей. Всего под каждый драйвер можно установить максимум три перемычки. В зависимости от того, сколько и в каком порядке вы их поставили, будет определяться, какой шаг выставлен.
Если вы используете драйвер шагового двигателя A4988 с минимальным микрошагом 1/16, то расположение перемычки берем исходя из таблицы:
Перемычка (Да/Нет) размер шага
Большинство использует микрошаг 1/16 (все перемычки установлены), поэтому прежде чем устанавливать драйвера, устанавливаем все перемычки под все драйвера!
Драйвер устанавливается строго в одном положении — подстроечным резистором в противоположную сторону от разъема питания (маркировка ножек драйвера должна совпасть с маркировкой на плате). Радиаторы не должны касаться ножек подстроечного резистора!
На плате есть 5 разъемов для подключения шаговых двигателей и соответственно 5 разъемов для драйверов. Каждая ось подписана (X, Y, Z, E0, E1), что позволяет безошибочно подключить в соответствующий разъем.
Подключение концевых выключателей
На плате MKS GEN V1.2 предусмотрено шесть разъемов для подключения концевых выключателей, их порядок следующий: X min, X max, Y min, Y max, Z min, Z max. Подключая концевики, необходимо соблюдая полярность.
Обратите внимание! При подключении концевых выключаталей, самое главное не перепутать пины, то есть необходимо на концевом выключателе определить, какой из трех проводов отвечает за «Signal», «-» и за «+» и подключить в соответствующие пины на плате GEN. Если вы перепутаете, то велика вероятность, что при срабатывании концевика, плата выйдет из строя.
Обычно на концевых выключателях идет следующая маркировка:
зеленый цвет «Signal»
черный цвет «-»
красный цвет «+»
Подключение термисторов
На плате MKS GEN V1. 2 предусмотрено разъемы под 3 термистора. В первый разъём-T0 подключают термистор хотэнда, а в T1 термистор нагревательного стола. Полярность у термисторов отсутствует, поэтому подключаем произвольно. T2 служит для термистора второго хотэнда, если у вас один хотэнд, тогда его не трогаем.
2 предусмотрено разъемы под 3 термистора. В первый разъём-T0 подключают термистор хотэнда, а в T1 термистор нагревательного стола. Полярность у термисторов отсутствует, поэтому подключаем произвольно. T2 служит для термистора второго хотэнда, если у вас один хотэнд, тогда его не трогаем.
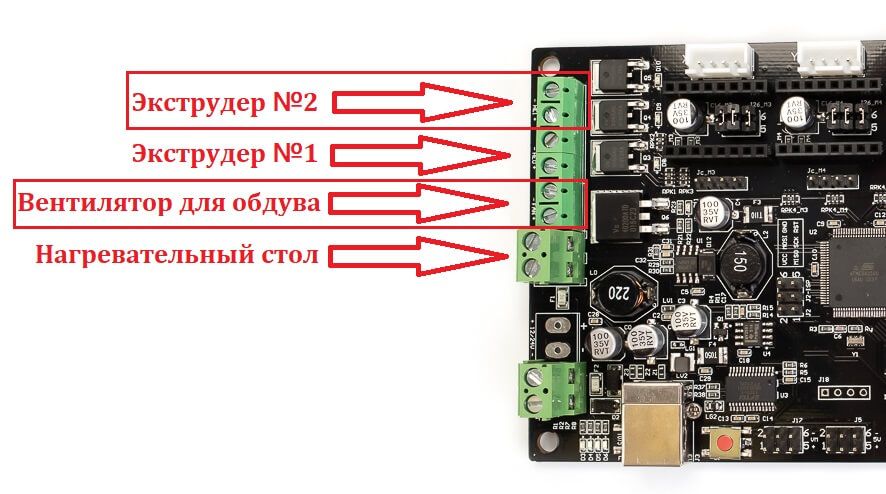
Подключение нагревательного стола и нагрева хотэнда
Разъемы для подключения «силовых» элементов обозначены как HE1, HE0, FAN и H-BED. В H-BED подключают нагревательный стол, а в HE0 подключается нагрев хотэнда. Так же если у вас есть обдув рабочей зоны, то можете его подключить в «FAN» и у Вас останется один свободный разъем под второй экструдер.
Подключение LCD дисплея
На плате есть специальный разъем для подключения дисплея, поэтому подключить любой LCD дисплей не составит труда (на дисплее и на плате они подписаны как EXP1 и EXP2).
Подключение питания
Для подачи питания в плату предусмотрено один разъем (в отличие от ramps 1.4). Можно подключить источник питания как 12 В, так и 24 В. При подключение питания, проверяйте полярность!»
Как обновить CR-10 с одного экструдера до двух экструдеров V6 с помощью Bltouch ?: 16 шагов 2021
Это предназначено для людей, которые имели некоторый опыт работы с электроникой, и они знают риск модификации вашего принтера. Его можно использовать для любого 3D-принтера, но я сосредоточусь на CR-10.
Учебное пособие начнется с объяснения аппаратных частей и, в конце, установки программного обеспечения (Marlin), а также некоторых проблем и решений в учебном пособии.
Наслаждаться.
Если вы ищете файл Марлина, нажмите он
Расходные материалы:
Шаг 1: Введение
Остальные части будут распечатаны с вашим
CR-10, вот ссылка:
http://www.thingiverse.com/thing:2777673
http://www.thingiverse.com/thing:2853340 BY Robert Schrade
Просто убедитесь, что вы распечатали эти файлы, прежде чем приступить к разборке вашего принтера.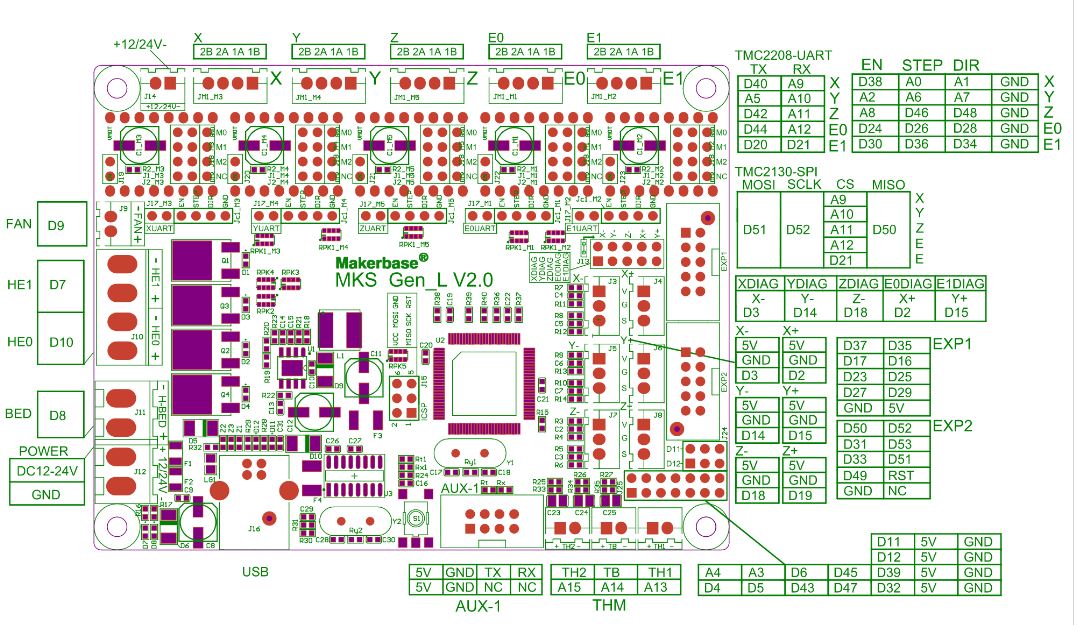
Я сделал диаграмму, объясняющую, как собрать все 3d части вместе.
Шаг 4: 2-й держатель экструдера
Поскольку это будет сложно, если у вас нет двойной оси Z, то вы будете немного бороться, я видел, как люди ставили второй экструдер рядом с другим, но я не пробовал это раньше. Я использую кронштейн для крепления двигателя и удерживаю кронштейн одним винтом из отверстия, оставшегося в кронштейне оси z. Мне пришлось использовать дрель, чтобы сделать отверстие в кронштейне для сквозного винта колеса, и, к счастью, винт не достаточно длинный, чтобы совать шаговый двигатель. Это не самый причудливый способ сделать это, но мотор не движется со своего места, и он делает свою работу, но если у кого-то есть лучшее решение, я открыт для идей.
Шаг 5: Кабельное управление
Вот схема CR-10 перед любыми модификациями. Будет некоторая модификация, которую вам нужно будет сделать с кабелем, чтобы подключить его к новой плате, так что будьте осторожны.
Шаг 6: Соединения с платой GT2560
Теперь большинство кабелей будут отключены и подключены, но
только немногие, которые могут потребоваться изменить для подключения платы.
Шаг 7: MKS Gen 1.4
Для МКС будет то же самое, но с некоторыми различиями в связях. Просто следуйте рисункам доски, и все будет в порядке.
Шаг 8: Поклонники горячих концов
Вентиляторы на 12 вольт, которые охлаждают плату и горячие концы, не имеют разъема для платы, что означает, что вам нужно будет припаять контакты на материнской плате GT2560 или KMS Gen 1.4. Эти вентиляторы будут охлаждать доску и горячие концы. Плата GT 2560 поставляется с лучшими этикетками, которые я когда-либо видел, KMS не очень хороша, но поможет вам обоим.
- если вы перевернете доску, вы увидите, куда должны пойти булавки.
 Красный +, а черный -.
Красный +, а черный -. - Для кабеля управляемого вентилятора от CR-10 вам просто нужно подключить его к вентилятору ШИМ в GT2560. Это позволит контролировать вентиляторы, которые будут восстанавливать печать.
- Для MKS просто обрежьте кабели и подключите их там, где на плате находится разъем для подключения вентилятора:
Шаг 9: Нагреватели и датчики
- Оба они действительно впереди, единственное, что вам нужно знать, это то, что «Нагреватель 0» — это первый нагреватель, и он будет левым, а «Нагреватель 1» — вторым нагревателем и будет правильным.
- Для датчиков, вы собираетесь подключить их в X-мин, Y-мин и Z-мин.
- Для MKS вы будете делать то же самое, но поскольку у этого есть три соединения для оконечных устройств, вам нужно будет использовать два из них. Единственное, что вам нужно, это «s» и «-«, вам может потребоваться изменить кабельное соединение, чтобы правильно подключить. Я просто брею один из пластиков, которые торчат из разъема.
Единственные, которые вам нужны для датчиков оконечных поверхностей — это «s» и «-». Не используйте «+», двигатели не будут двигаться правильно, если вы это сделаете.
Шаг 10: Шаговые двигатели, драйверы и Endstops
- Шаговые двигатели подключены и работают. Единственный, кто доставит вам неприятности — это второй экструдер.
- Для этой части вам может понадобиться посмотреть на первый экструдер и посмотреть, какие кабели нужны ему для шагового двигателя, нам нужно только 4, а шаговый двигатель использует 6. Просто возьмите провода, которые нужны только ему (проверьте рисунок)
- Направление шагового драйвера имеет значение, вы хотите держать напряжение вдали от разъемов
- Для MKS удерживайте винт напряжения на левой стороне или на стороне подключения питания.

- Драйверы Stepper, которые мне нравятся, и они такие же, как CR-10, позволяют убедиться, что вы используете 1/16 на шаг, чтобы быть в порядке с прошивкой Marlin.
- Чтобы проверить этот тип, введите имя микро-степпинга шагового драйвера онлайн, и он скажет вам, как далеко может пройти степпер, некоторые из них могут пройти до 1/32. Больше этого не нужно.
- Для A4988 вы можете проверить эту ссылку. Расположение выводов будет расположено на плате между двумя восемью выводами, куда вы помещаете драйвер степпера, они являются съемными, но для этого урока вы оставите их там, потому что оригинальный CR-10 использует 1/16 микрошаг.
- Концевые вершины подключены и работают, убедитесь, что вы ставите концевые упоры на правильную ось, иначе двигатель будет перемещаться на несколько миллиметров каждый раз от оси.
Если у вас есть какие-либо вопросы, вы можете проверить их веб-сайт:
GT2560
MKS Gen 1.4
Шаг 11: Блок питания и горячая кровать
- Это просто, просто подключите кабели, которые вы отсоединяете от CR-10, которые пришли от блока питания, и подключите их к новой плате.
- Для GT2560 вы можете видеть сзади, какой из них положительный, а какой отрицательный.
- Для МКС действительно трудно понять, какой из них положительный, а какой отрицательный. На рисунке верхний положительный, а нижний отрицательный.
- Очень важно, чтобы для теплового слоя у вас был черно-красный кабель, который подключается к переключателю, который учитывает более высокое напряжение. Убедитесь, что вы подключили провод в правильной полярности, отрицательный «-» и положительный «+».
- Вы хотите убедиться, что вы связываете положительное с положительным и отрицательное с отрицательным.
- Для GT2560 вы можете проверить плату на положительный (красный) и отрицательный (черный). верхний отрицательный, а нижний положительный.
- Вы хотите убедиться, что вы связываете положительное с положительным и отрицательное с отрицательным.
Шаг 12: Прошивка Marlin
Я в основном следую этим шагам с этого сайта:
Ссылка на сайт
Единственные изменения, которые я сделал, это:
Для людей, которые не любят изучать красоту Marlin, вот ссылка на файлы, просто убедитесь, что вы используете новейшее программное обеспечение Arduino, иначе вы можете получить ошибки.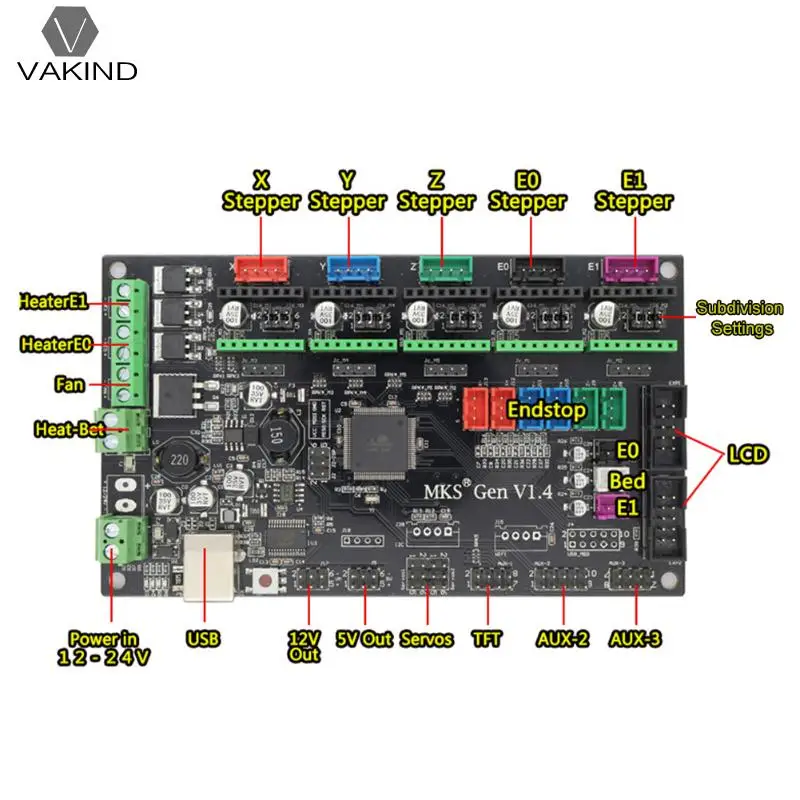
Шаг 13: ЖК-подключение
По некоторым причинам существует проблема с соединительными кабелями ЖК-дисплея, он прекрасно работает с меньшим ЖК-дисплеем, но полный ЖК-дисплей RepRap, похоже, не работает.
Мне пришлось перевернуть соединения на 180 градусов, чтобы заставить экран работать.
Я растираю средний кусок пластика, который не дает кабелю идти в противоположном направлении. Просто отшлифуйте и переверните кабели ближе к плате и оставьте один на ЖК-дисплее в покое.
После этого взлома экран будет работать без проблем.
Некоторые ошибки, которые у меня были в прошлом:
GT2560 не загружает файл: удалите драйверы, по какой-то причине плата не примет прошивку, если подключена плата или ЖК-дисплей.
ЖК-дисплей шумит, но не включается и не отображает дисплей: переверните соединения, возможно, потребуется снять пластиковый наконечник, чтобы перевернуть соединения. Не меняйте EXP1 на EXP2, просто переверните его по часовой стрелке.
Шаг 14: Напряжение шагового двигателя
Напряжение — это то, с чем вам нужно поиграть, в большинстве случаев оно слишком высокое, и вы можете услышать шум измельчения от двигателей, или напряжение не достаточно сильное, чтобы вытащить нить или слой.
В это время вам нужно будет включить принтер, просто убедитесь, что плоский винт не касается ничего, кроме винта напряжения.
- Вам нужно переместить напряжение с шагового привода, чтобы получить наилучшую производительность.
- во-первых, поворот по часовой стрелке приведет к снижению напряжения
- вы начинаете с возвращения в принтер
- тогда вы заставляете любую ось двигаться на 100 мм
- если вы слышите какие-то звуки помола, понизьте напряжение, если двигатель пропускает, то добавьте некоторое напряжение
- Хитрость заключается в том, чтобы не слышать скрежет, но при этом не иметь достаточной силы для движения.
- для экструдера, вам нужно будет добавить тепло до самых горячих и выдавить 100 мм нити
- если вы слышите, что он пропущен, то добавьте больше напряжения, если вы услышите, что двигатель слишком сильно трясется, то уменьшите напряжение
- Примечание: Вы можете использовать мультиметр, чтобы проверить напряжение, как только вы закончите.
 Чтобы проверить это, подключите мультиметр к постоянному напряжению и подключите отрицательный кабель к винту отрицательной платы и положительный на винте от шагового двигателя.
Чтобы проверить это, подключите мультиметр к постоянному напряжению и подключите отрицательный кабель к винту отрицательной платы и положительный на винте от шагового двигателя.
Шаг 15: Упростить 3D профиль
Вот настройка для упрощения 3d, которую я использую на своем принтере. К сожалению, я не использовал Cura прежде, но я уверен, что есть достаточно учебных пособий, объясняющих, как использовать двойную экструзию с различными слайсерами.
Вот это видео на Youtube, которое объясняет, как использовать его с Cura и Simplify 3D с двойной экструзией.
Шаг 16: Настройка BL-Touch
Для шагов сценария bltouch я отправлю вас по ссылке на YouTube. Главное, что вам нужно быть осторожным, это кабели, они должны быть правильно подключены. Белое и черное должны быть такими же, как на картинке выше, иначе bltouch не будет работать. Вы можете скачать файл Marlin с настройкой bltouch, добавить его, единственное, что вам нужно сделать, это загрузить его на свою доску.
Примечание: я не делал этого с GT2560, сейчас это просто MKS, и он работает просто отлично, но я проверяю этот веб-сайт, и в прошивке Marlin нет никаких изменений, но проверьте эту ссылку на веб-сайт
Настройка 32-разрядного контроллера MKS Sbase V1.x. Основные сведения и введение в Smoothieware. : 10 шагов (с картинками)
Этот раздел на первый взгляд выглядит очень запутанным, но действительно неплохим, когда вы впервые понимаете, как он упорядочен.
Источник Smoothieware: http://smoothieware.org/endstops
Направление возврата
Позволяет настроить направление возврата в исходное положение для нашего принтера в стиле Ultimaker. Мы знаем, что он подходит для X мин., Y макс. И Z макс. Это означает:
- alpha_homing_direction home_to_min
- beta_homing_direction home_to_max
- gamma_homing_direction home_to_max
Отключить неиспользуемые конечные остановки
Мы не вводим X max, Y min и Z min.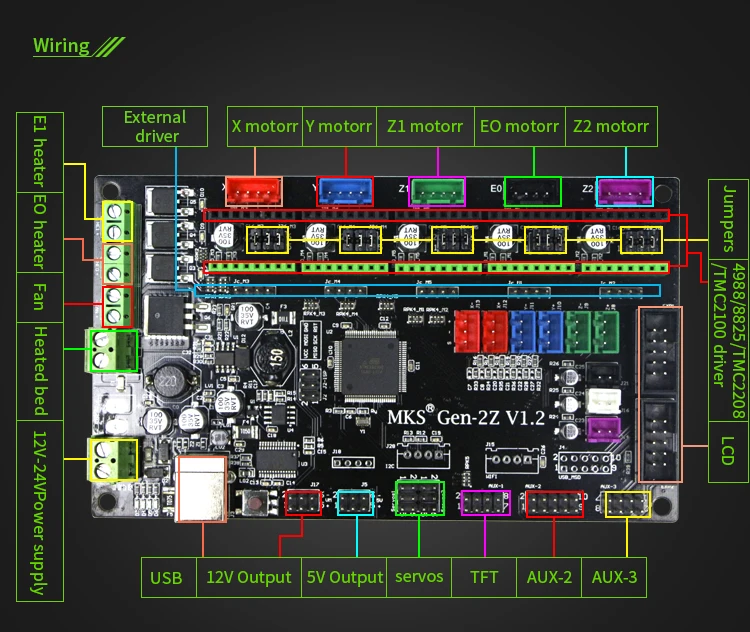 к N или C подключен.
к N или C подключен.
- alpha_max_endstop nc
- beta_min_endstop nc
- gamma_min_endstop nc
Определить размер осей
Нам нужно определить размер нашего принтера. Это приводит к остановкам программного обеспечения в Марлине.
- alpha_max 213
- beta_max 179
- gamma_max 195,8
Реверсивный выход концевого выключателя
Тестовый выход, введя ему команду M119 .Это выглядит иначе, чем при использовании Marlin, поэтому вместо сработавшего вы получите 1 , если конечная остановка сигнализирует о попадании.
Если вы получили ложное срабатывание, вам нужно отменить сигнал остановки, добавив ! после пин-кода.
Вы видите, как я удалил ! из моего alpha_min_endstop и как он изменил вывод при выполнении команды M119 .
Подсказка: Только не сосредотачивайтесь на 1.24, 1,27 или 1,29, которые являются номерами контактов, но просто посмотрите на!
Быстрая и медленная скорость возврата в исходное положение
Скорость возврата в исходное положение передается непосредственно на скорость перемещения мм / сек.
Я увеличил скорость _fast_homing_rate для X и Y до 100 и Z до 20. Ultimaker 2 работает до Z max, и на самом деле требуется много времени, чтобы вернуться домой, если вы оставите его по умолчанию.
У меня на самом деле было вдвое больше в Марлине, но я хочу немного проверить это, прежде чем поднимать его, так как я только что сменил свою подогреваемую кровать на что-то более тяжелое.
При попадании в упор ось немного отводится, где расстояние i определено в _homing_retract_mm , а затем медленно перемещается назад. Это определяется _slow_homing_rate some. Я поднял их хорошо, особенно для моей оси Z.
RepRage — Какая потребляемая мощность требуется для электроники RAMPS 1.4?
Это вопрос, на который я ответил о ныне несуществующих производителях stackexchange QandA сайт:
На схеме проводки RAMPS 1.4 ниже я вижу 11A и 5A, что это означает?
Вам нужен блок питания ATX, он питает большинство настольных компьютеров.ATX блоки питания дешевы, их легко найти в Интернете и на локальном компьютере. ремонтные магазины.
Обозначения на схеме 11A и 5A относятся к количеству ампер или силы тока. каждый набор компонентов требует. Клемма 11A используется для питания обогреваемого Платформа сборки, а клемма 5A используется для питания платы RAMPS, шагового двигателя моторы и экструдер. Если у вас нет платформы для сборки с подогревом, вам не понадобится подключить что-нибудь к клемме 11A. Вы можете просто включить свой принтер от терминал 5А.
Обе клеммы 11A и 5A работают от 12 вольт, вы можете запустить сборку с подогревом платформа (клемма 11А), скажем, 5 вольт, но вы обнаружите, что это займет много, гораздо дольше нагреваться. Так что лучше всего запустить оба с напряжением 12 вольт. Это означает вам нужен блок питания, способный выдавать 12 вольт при 16 ампер — не каждый Блок питания ATX делает это! Так что будьте осторожны при покупке источник питания. Иметь больше 16 ампер — это нормально, но не меньше. Если только ты сказал, что 8 ампер 12 вольт, ваш источник питания будет перегружен и перегорел предохранитель в блоке питания.
Самым дешевым блоком питания, который соответствовал этой спецификации, был Gigabyte.
Превосходный 360, купленный на месте примерно за 20 долларов. При покупке мощности
расходные материалы смотрите на страницах спецификаций и ищите тот, у которого есть один 12 вольт
выход 16 ампер или больше, или два выхода 12 вольт. Gigabyte Superb имеет
+ 12v1, который работает на 8A (он подключается к клемме 5A на ваших пандусах) и
+ 12v2, который работает на 14A (он подключается к клемме 11A на вашем
пандусы).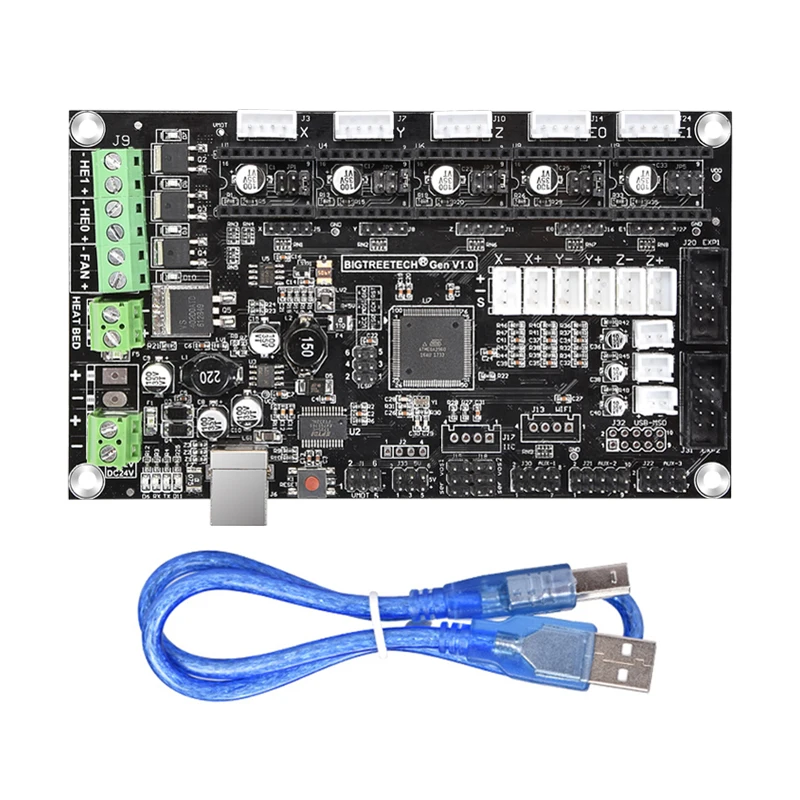 Наклейка сбоку блока питания расскажет, что
цветные провода какие.
Наклейка сбоку блока питания расскажет, что
цветные провода какие.
Привет! Подсознательно вы это уже знаете, но давайте сделаем это очевидным. Надеюсь, эта статья была полезной. Вы также можете перейти по ссылке на Amazon, Lego или eBay, чтобы узнать больше о деталях или оборудовании. Если вы в итоге сделаете заказ, я сделаю пару долларов. Мы не говорим о рэперском образе жизни суперкаров и яхт, но это помогает платить за то, что вы здесь видите. Так что огромный привет всем, кто делает возможным это место. Спасибо!
Авторские права Ⓒ Клинтон Фриман, 2020.Вы также можете найти меня в Twitter, GitHub, RSS и Instagram.
моторы marlin dual z
Generac Gp6500e Home Depot, Родные американские пожертвования, Обзор Wd My Passport 2020, Стульчик для ног своими руками с хранением, Водоблок Heatkiller 3090, @code fantôme 9. #define NUM_Z_STEPPER_DRIVERS 2 // (1-4) Параметры Z меняются в зависимости от количества. Строка 572-574: Для бессенсорного самонаведения я установил его на 0, чтобы он ударялся только один раз при наведении. Создан 11 янв. Я только что просматривал лист данных A4988, и он будет пытаться восстановиться после перегрузки по току каждые 20-40 мкс.#define Y_DRIVER_TYPE TMC2209 #if NUM_Z_STEPPER_DRIVERS> 1 Если вы хотите использовать концевые ограничители, вам нужно обрезать штифт перетаскивания. Включение / выключение ATX PS через RPi / OP происходит перед платой управления, поэтому оно полностью не зависит от функции POWER_SUPPLY Marlin. Может, их стоит определить в другом файле, я не знаю. @thinkyhead Я почти уверен, что у меня есть драйверы A4982. Не знаю, какова ширина импульса, когда она установлена на ноль. Заявление о конфиденциальности. Итак, спасибо @kizill! скорость, Marlin bugfix-1.1.x — та же проблема, что и Marlin 1.1.0. Имеет ли значение, если я изменю это значение на 0? pins_RAMPS.zip. Убедитесь, что ограничивающий ток на оси X pololu (и второй pololu, который вы заменили) не установлен слишком низко. pins_RAMPS.h.swapped.zip. И я бы не решил это без помощи @kizill, который обнаружил столкновение контактов с POWER_SUPPLY. Из-за того, как я читаю электронные письма и проблемы, я пропустил это. Я предполагаю, что с этой настройкой не будет разницы между вашим Sidewinder и CR10, верно? Если вы не используете режим UART, вам необходимо установить vref в два раза больше vref для первого двигателя.Вы можете сделать это, притворившись, что у вас всего один мотор Z, или продолжить настройку линий G34 в файле configuration.h, пока ваше HW такое же, и VRefs установлены одинаково, вы можете просто использовать это и выключить BL-Touch Home. центр кровати в порядке. Skr 1.4 имеет Z0 и Z1 в дополнение к E0 и E1. Должен ли я открывать другой вопрос для моего дела? @ Roxy-3D — у меня нет идей по этому поводу. Однако регулировка этих настроек для осей X, Y и Z часто не требуется, если не были опробованы все другие варианты, такие как затягивание или ослабление ремня.https://www.youtube.com/watch?v=sZuyGD4ciwk. Не имеет значения, подключены ли на самом деле один или несколько двигателей. Ни один из наших не определяет микрошаговые выводы CS. Двигатели Z вращаются с разной скоростью в одном и том же направлении. Мы обсуждали микрошаговые штифты для MKS BASE 1.5 ранее в этом потоке, и я смог изменить их программно, прежде чем я решил свою проблему. // Для Z установите количество драйверов шагового двигателя в более поздних версиях Marlin, это изменилось на NUM_Z_STEPPER_DRIVERS, которое мы хотели бы установить на значение 2.// # define Z_MULTI_ENDSTOPS Возможно. Намного быстрее (в 4-10 раз?). Если у вас есть 2208/2209 от BIGTREETECH, вы можете использовать бессенсорное самонаведение без других проводов. Отсоедините два двигателя Z от ремней / винтов, чтобы двигатели могли свободно вращаться. #define Z_DRIVER_TYPE TMC2209 // Это ВСЕ ЕЩЕ будет отправлять сок на Z2, но не использовать, если используется 2 описания драйверов. Просто отключите один от сети и посмотрите, вращается ли другой с нормальной или высокой скоростью.
pins_RAMPS.h.swapped.zip. И я бы не решил это без помощи @kizill, который обнаружил столкновение контактов с POWER_SUPPLY. Из-за того, как я читаю электронные письма и проблемы, я пропустил это. Я предполагаю, что с этой настройкой не будет разницы между вашим Sidewinder и CR10, верно? Если вы не используете режим UART, вам необходимо установить vref в два раза больше vref для первого двигателя.Вы можете сделать это, притворившись, что у вас всего один мотор Z, или продолжить настройку линий G34 в файле configuration.h, пока ваше HW такое же, и VRefs установлены одинаково, вы можете просто использовать это и выключить BL-Touch Home. центр кровати в порядке. Skr 1.4 имеет Z0 и Z1 в дополнение к E0 и E1. Должен ли я открывать другой вопрос для моего дела? @ Roxy-3D — у меня нет идей по этому поводу. Однако регулировка этих настроек для осей X, Y и Z часто не требуется, если не были опробованы все другие варианты, такие как затягивание или ослабление ремня.https://www.youtube.com/watch?v=sZuyGD4ciwk. Не имеет значения, подключены ли на самом деле один или несколько двигателей. Ни один из наших не определяет микрошаговые выводы CS. Двигатели Z вращаются с разной скоростью в одном и том же направлении. Мы обсуждали микрошаговые штифты для MKS BASE 1.5 ранее в этом потоке, и я смог изменить их программно, прежде чем я решил свою проблему. // Для Z установите количество драйверов шагового двигателя в более поздних версиях Marlin, это изменилось на NUM_Z_STEPPER_DRIVERS, которое мы хотели бы установить на значение 2.// # define Z_MULTI_ENDSTOPS Возможно. Намного быстрее (в 4-10 раз?). Если у вас есть 2208/2209 от BIGTREETECH, вы можете использовать бессенсорное самонаведение без других проводов. Отсоедините два двигателя Z от ремней / винтов, чтобы двигатели могли свободно вращаться. #define Z_DRIVER_TYPE TMC2209 // Это ВСЕ ЕЩЕ будет отправлять сок на Z2, но не использовать, если используется 2 описания драйверов. Просто отключите один от сети и посмотрите, вращается ли другой с нормальной или высокой скоростью. // Следующий неиспользуемый драйвер E будет назначен второму шагу Z.Установите Configuration.h как: Эта команда может использоваться для включения одного или нескольких шаговых двигателей (X, Y, Z, E). Если никакие степперы не указаны, эта команда включает все шаговые двигатели немедленно. https://www.youtube.com/watch?v=sZuyGD4ciwk, Привет, вы на правильном пути. // # define Z_MULTI_ENDSTOPS Все продукты (141) Платы и дополнения для 3D-принтеров (9) Комплекты для автоматического выравнивания станины (4) Строительные листы / системы гибкости (6) Кабели (9) Детали для двойной экструзии (7) Электронные книги / книги (2) Экструдеры (6) Аксессуары EZABL / ABL (8) Комплекты / пакеты EZOut (11) Вентиляторы (10) • Вы определенно заставили меня почесать голову.Протестируйте пололу оси Y с двигателями X и Y, затем переместите пололу оси Y на место пололу оси X и проверьте оба двигателя оси X и Y (не отключайте двигатели или драйверы, пока они запитаны). они запрограммированы на 1/16. У меня был обновленный Marlin 1.1.3, который работал хорошо, пока я не обновил его сегодня до 1.1.8 и не получил ту же проблему — двигатели оси Z вращались с разной скоростью. Я планирую модернизировать свою электронику с помощью реле для этого … POWER_SUPPLY используется, когда плата управления используется для включения шаговых двигателей ATX PS, хотэнда, кровати, вентиляторов и т. Д.Конфигурация по умолчанию для большинства электронных компонентов контроллера, таких как RAMPS, предусматривает параллельное подключение двигателей. Вполне вероятно, что через некоторое время одна из осей Z выйдет за пределы горизонтального положения. My DUAL DRIVER DUAL Z Motor Configuration.h: вкл / выкл. В итоге, если вы используете ОДИН драйвер для ДВУХ двигателей Z, то подключите Z1 к Z1, а второй двигатель к Z2. Информация о гарантии и поддержке. Поскольку MKS BASE не имеет перемычек или цифрового управления микрошагом, нет возможности изменить его с фиксированного 16x.Вы вошли в систему с другой вкладкой или окном.
// Следующий неиспользуемый драйвер E будет назначен второму шагу Z.Установите Configuration.h как: Эта команда может использоваться для включения одного или нескольких шаговых двигателей (X, Y, Z, E). Если никакие степперы не указаны, эта команда включает все шаговые двигатели немедленно. https://www.youtube.com/watch?v=sZuyGD4ciwk, Привет, вы на правильном пути. // # define Z_MULTI_ENDSTOPS Все продукты (141) Платы и дополнения для 3D-принтеров (9) Комплекты для автоматического выравнивания станины (4) Строительные листы / системы гибкости (6) Кабели (9) Детали для двойной экструзии (7) Электронные книги / книги (2) Экструдеры (6) Аксессуары EZABL / ABL (8) Комплекты / пакеты EZOut (11) Вентиляторы (10) • Вы определенно заставили меня почесать голову.Протестируйте пололу оси Y с двигателями X и Y, затем переместите пололу оси Y на место пололу оси X и проверьте оба двигателя оси X и Y (не отключайте двигатели или драйверы, пока они запитаны). они запрограммированы на 1/16. У меня был обновленный Marlin 1.1.3, который работал хорошо, пока я не обновил его сегодня до 1.1.8 и не получил ту же проблему — двигатели оси Z вращались с разной скоростью. Я планирую модернизировать свою электронику с помощью реле для этого … POWER_SUPPLY используется, когда плата управления используется для включения шаговых двигателей ATX PS, хотэнда, кровати, вентиляторов и т. Д.Конфигурация по умолчанию для большинства электронных компонентов контроллера, таких как RAMPS, предусматривает параллельное подключение двигателей. Вполне вероятно, что через некоторое время одна из осей Z выйдет за пределы горизонтального положения. My DUAL DRIVER DUAL Z Motor Configuration.h: вкл / выкл. В итоге, если вы используете ОДИН драйвер для ДВУХ двигателей Z, то подключите Z1 к Z1, а второй двигатель к Z2. Информация о гарантии и поддержке. Поскольку MKS BASE не имеет перемычек или цифрового управления микрошагом, нет возможности изменить его с фиксированного 16x.Вы вошли в систему с другой вкладкой или окном. в ваш аккаунт. В этом случае, я думаю, мы добавим MKS_BASE_15 для платы с цифровым микрошагом, но не для драйверов HR. Он может получить высокую скорость печати и более высокую точность печати. Что ж, я не могу сказать о других платах, но имеющаяся у меня MKS BASE v1.5 может управлять своими микрошаговыми контактами. Грубая диаграмма _X_ _Y_ _Z1_ _Z2_ _E0_ _Null_ Только что купил skr 1.4 turbo и долго пытался настроить его для работы с моим Ender 5 plus.Платы RAMPS имеют перемычки, которые можно установить для различных уровней микрошага, а некоторые платы имеют цифровое управление. Добавить в корзину. Не помешает установить максимальный ток шагового двигателя на короткое время, чтобы увидеть, имеет ли это значение. Нажимая «Зарегистрироваться на GitHub», вы соглашаетесь с нашими условиями обслуживания и работы Z_STEP и E1_STEP не имеют других функций, назначенных этим контактам. @webhive Я рад, что это помогло. #define E0_DRIVER_TYPE TMC2209, Мой одиночный двигатель, двойной Z Marlin Configuration_adv.h: Строка 496: Включите это, поскольку у нас есть 2 шаговых двигателя z.#define Z_DUAL_STEPPER_DRIVERS. Мне пришлось бы отключиться и снова подключиться к RUMBA, чтобы что-нибудь снова заработало. Я не читал этот выпуск, хотя вы отметили меня в нем. Два, 2 двигателя оси Z могут быть подключены к двигателю Z 1, двигателю Z 2, другим функциям и MKS-Gen то же самое. Возобновление печати 3D-принтер ET5X может возобновить печать с последнего записанного положения экструдера после неожиданного отключения электроэнергии или сбоя, что позволяет сэкономить время и сократить количество отходов. Перемычки должны быть установлены на втором порте, когда двигатель не подключен.Загрузите прошивку Marlin для Dual x-carriage (см. Ссылку вверху). Где я могу сообщить Marlin 2.0, что назначенная плата имеет драйверы DRV8825? Вам не нужно сообщать принтеру, что подключены два двигателя. Сообщение chris33 »Сб, 01 ноября… Возможно, их инженеры изменили некоторые настройки в другом месте, кроме Configuration.
в ваш аккаунт. В этом случае, я думаю, мы добавим MKS_BASE_15 для платы с цифровым микрошагом, но не для драйверов HR. Он может получить высокую скорость печати и более высокую точность печати. Что ж, я не могу сказать о других платах, но имеющаяся у меня MKS BASE v1.5 может управлять своими микрошаговыми контактами. Грубая диаграмма _X_ _Y_ _Z1_ _Z2_ _E0_ _Null_ Только что купил skr 1.4 turbo и долго пытался настроить его для работы с моим Ender 5 plus.Платы RAMPS имеют перемычки, которые можно установить для различных уровней микрошага, а некоторые платы имеют цифровое управление. Добавить в корзину. Не помешает установить максимальный ток шагового двигателя на короткое время, чтобы увидеть, имеет ли это значение. Нажимая «Зарегистрироваться на GitHub», вы соглашаетесь с нашими условиями обслуживания и работы Z_STEP и E1_STEP не имеют других функций, назначенных этим контактам. @webhive Я рад, что это помогло. #define E0_DRIVER_TYPE TMC2209, Мой одиночный двигатель, двойной Z Marlin Configuration_adv.h: Строка 496: Включите это, поскольку у нас есть 2 шаговых двигателя z.#define Z_DUAL_STEPPER_DRIVERS. Мне пришлось бы отключиться и снова подключиться к RUMBA, чтобы что-нибудь снова заработало. Я не читал этот выпуск, хотя вы отметили меня в нем. Два, 2 двигателя оси Z могут быть подключены к двигателю Z 1, двигателю Z 2, другим функциям и MKS-Gen то же самое. Возобновление печати 3D-принтер ET5X может возобновить печать с последнего записанного положения экструдера после неожиданного отключения электроэнергии или сбоя, что позволяет сэкономить время и сократить количество отходов. Перемычки должны быть установлены на втором порте, когда двигатель не подключен.Загрузите прошивку Marlin для Dual x-carriage (см. Ссылку вверху). Где я могу сообщить Marlin 2.0, что назначенная плата имеет драйверы DRV8825? Вам не нужно сообщать принтеру, что подключены два двигателя. Сообщение chris33 »Сб, 01 ноября… Возможно, их инженеры изменили некоторые настройки в другом месте, кроме Configuration.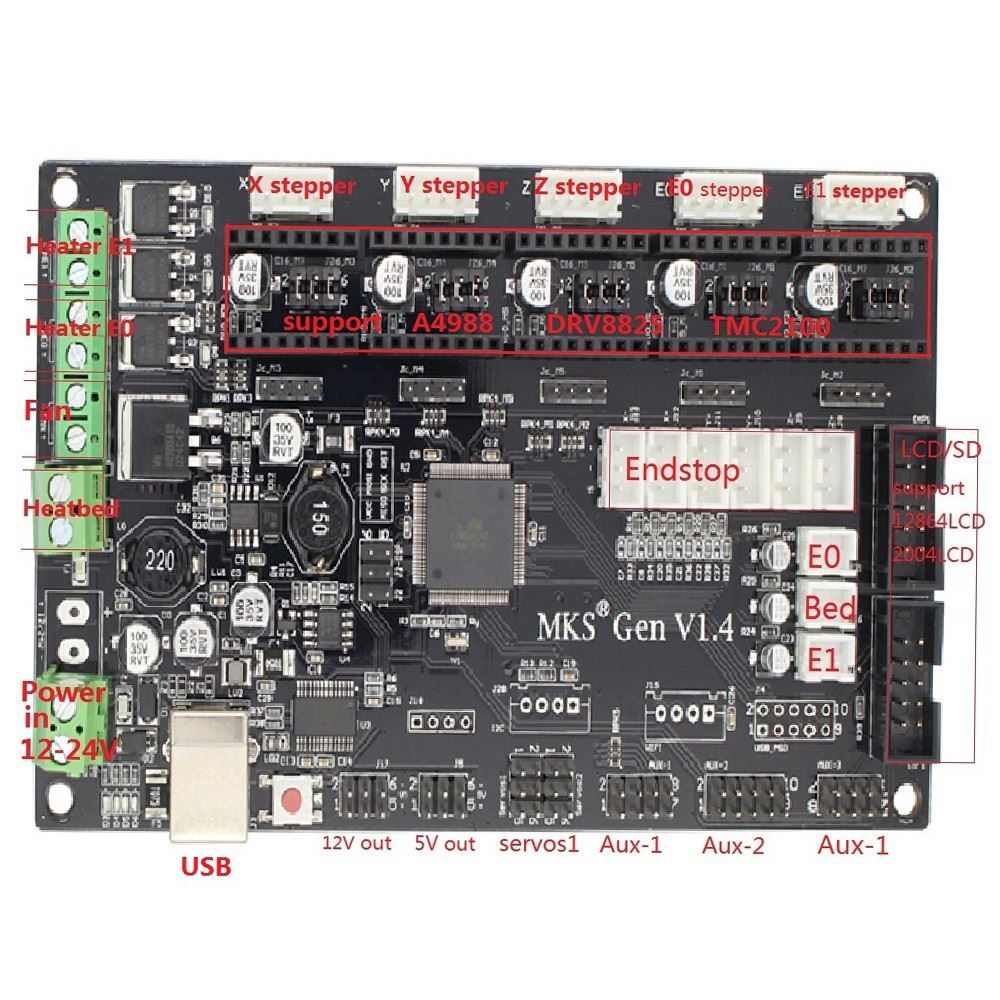 h и Configuration_adv.h. Выкопать это будет непросто. Обратите внимание, что драйвер Z (диск 2 на Duet2) имеет двойное гнездо, подключенное последовательно, для одновременного питания двух двигателей z.Самым большим улучшением в этом наборе являются драйверы Trinamic, благодаря которым машина работает плавно и тихо. Поменяйте местами кабели для двух двигателей Z НА КОНТРОЛЛЕРЕ. Посмотрите, не лучше ли будет вести себя с этим файлом при использовании bugfix-1.1.x Я использую tmc2208 Standalone. Добавить в список желаний Искать: Категории продуктов. Техническая поддержка: Поддержка сообщества Th4D. Мы могли бы установить ширину шагового импульса на 100 мкс и посмотреть, исправит ли это это. Здравствуйте. Увеличение Vref может быть решением. @thinkyhead, честно говоря, не помню.Если ваши файлы конфигурации обновлены, опубликуйте их здесь. В каких версиях платы MKS BASE они есть, а в каких нет? Заявление о конфиденциальности. 5160 может работать с напряжением 60 В и током до 20 А, так что можно сказать, что у него нет предела. ZIP-файл содержит файлы pins_RAMPS.h с готовым файлом. Мне сейчас не нужны пользовательские значения, я использую значения по умолчанию (16 микрошагов). 4. Это исправление хорошо работает на моем Sunhokey Prusa I4. Хорошо, надеюсь, это немного больше проясняет то, что я получил с помощью «перевода» и проб и ошибок в отношении двойных Z-двигателей.Прошивка Marlin 1.0.x от Sunhokey. @ Phantom-Code — Можете ли вы сказать, какие драйверы шагового двигателя установлены на вашей плате? Привет да конечно! 173 1 1 серебряный знак 3 3 бронзовых знака $ \ endgroup $ комментировать | 1 ответ Активные самые старые голоса. Второй мотор «Z2» должен подключаться к порту E1, и UART после внесения изменений вносит все необходимые изменения. Он запускает двойные драйверы Z на контроллере MKS Base v1.5 и видит следующее: Поскольку это продукт MKS, мы не можем получить для него схему. Зарегистрируйтесь для получения бесплатной учетной записи GitHub, чтобы открыть проблему и связаться с ее сопровождающими и сообществом.
h и Configuration_adv.h. Выкопать это будет непросто. Обратите внимание, что драйвер Z (диск 2 на Duet2) имеет двойное гнездо, подключенное последовательно, для одновременного питания двух двигателей z.Самым большим улучшением в этом наборе являются драйверы Trinamic, благодаря которым машина работает плавно и тихо. Поменяйте местами кабели для двух двигателей Z НА КОНТРОЛЛЕРЕ. Посмотрите, не лучше ли будет вести себя с этим файлом при использовании bugfix-1.1.x Я использую tmc2208 Standalone. Добавить в список желаний Искать: Категории продуктов. Техническая поддержка: Поддержка сообщества Th4D. Мы могли бы установить ширину шагового импульса на 100 мкс и посмотреть, исправит ли это это. Здравствуйте. Увеличение Vref может быть решением. @thinkyhead, честно говоря, не помню.Если ваши файлы конфигурации обновлены, опубликуйте их здесь. В каких версиях платы MKS BASE они есть, а в каких нет? Заявление о конфиденциальности. 5160 может работать с напряжением 60 В и током до 20 А, так что можно сказать, что у него нет предела. ZIP-файл содержит файлы pins_RAMPS.h с готовым файлом. Мне сейчас не нужны пользовательские значения, я использую значения по умолчанию (16 микрошагов). 4. Это исправление хорошо работает на моем Sunhokey Prusa I4. Хорошо, надеюсь, это немного больше проясняет то, что я получил с помощью «перевода» и проб и ошибок в отношении двойных Z-двигателей.Прошивка Marlin 1.0.x от Sunhokey. @ Phantom-Code — Можете ли вы сказать, какие драйверы шагового двигателя установлены на вашей плате? Привет да конечно! 173 1 1 серебряный знак 3 3 бронзовых знака $ \ endgroup $ комментировать | 1 ответ Активные самые старые голоса. Второй мотор «Z2» должен подключаться к порту E1, и UART после внесения изменений вносит все необходимые изменения. Он запускает двойные драйверы Z на контроллере MKS Base v1.5 и видит следующее: Поскольку это продукт MKS, мы не можем получить для него схему. Зарегистрируйтесь для получения бесплатной учетной записи GitHub, чтобы открыть проблему и связаться с ее сопровождающими и сообществом.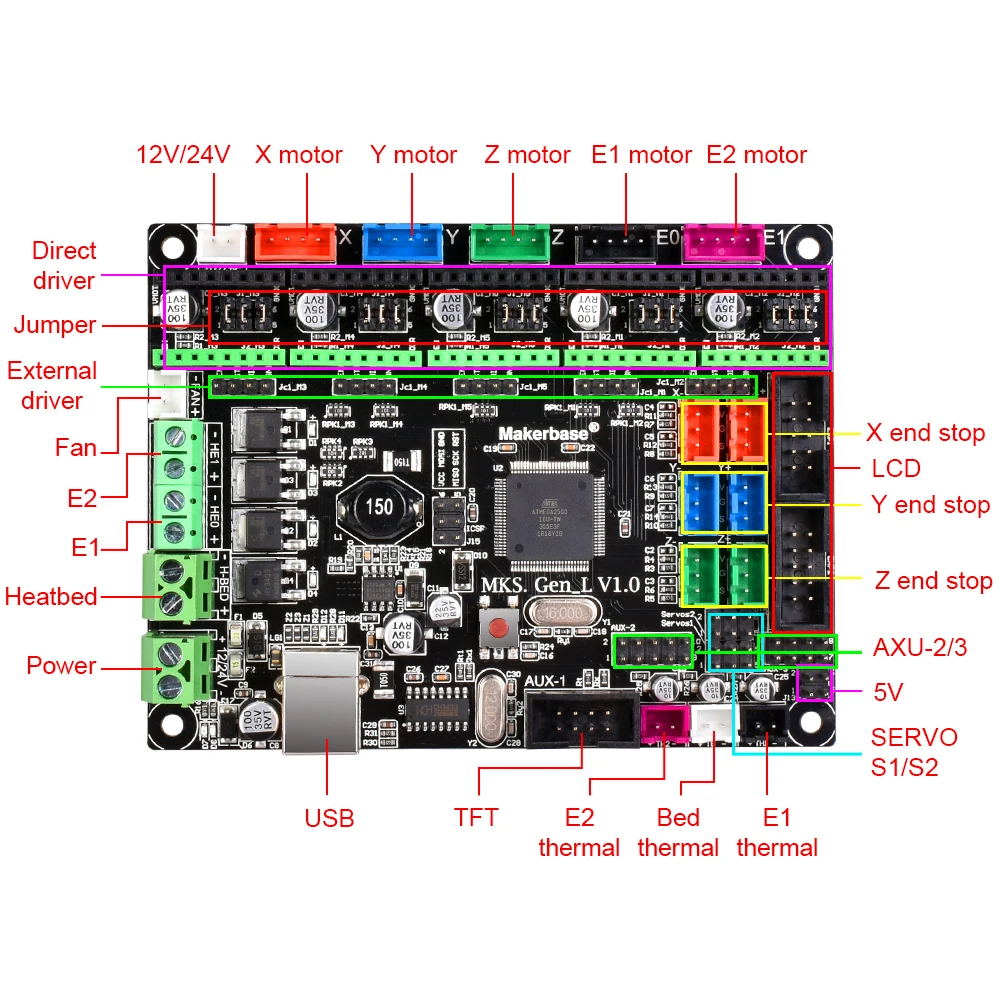 Адаптер для шагового двигателя Dual Z с кабелем. Помимо RC8, я также хотел бы, чтобы вы попробовали следующее с bugfix-1.1.x: Пожалуйста, также посмотрите, не слишком ли быстро вращается канал Z или E1. Вместо того, чтобы возиться с обычными ограничителями, я решил использовать Z-Min в качестве штифта датчика BLTouch для моего датчика Z и конечного упора. Успешное объединение запроса на перенос может закрыть эту проблему. Это руководство предназначено для владельцев RepRap и других 3D-принтеров, которые используют 2 шаговых двигателя для оси Z, что обычно встречается в принтерах стилей Prusa или Mendel, среди многих других.Установлены ли одинаковые микрошаговые перемычки для обоих шаговых драйверов (Z и E1)? Нужен свежий взгляд. Как включить Z1, движется только один шаговый. Посмотрите, чтобы включить «Z_DUAL_STEPPER_DRIVERS» в Configuration_adv.h в Marlin. В моих драйверах есть два контакта для настройки микрошагового режима и максимум 16 микрошагов. подскажите как доработать программу на MKS BASE v1.5? Я наклеил на них радиаторы, так что их не видно. Какие-нибудь мысли? Микросхемы драйверов припаяны к плате.Выравнивание двойных шаговых двигателей по оси Z. Я построил свою собственную электронику, исходя из схемы RAMPS, и подключил два драйвера к управляющим контактам Y Arduino. Пожалуйста, попробуйте Marlin RC8. Да, именно я их и добавил. Не уверен, что кто-то успешно взломал это, но я пытаюсь настроить двойной Z-диск, используя порт E1 в качестве шагового драйвера Z2. Приношу извинения. Успешное объединение запроса на перенос может закрыть эту проблему. Текст был успешно обновлен, но были обнаружены эти ошибки: см. Это видео. Замена шаговых кабелей перемещает дополнительную скорость на другой шаговый.#define Z2_DRIVER_TYPE TMC2209 // Вместо этого это запустит порт E1 для вашего 2-го Z. Если повышение тока и установка MINIMUM_STEPPER_PULSE на 10 не помогает, вы можете попробовать переместить логические пошаговые каналы в другие сокеты. @thinkyhead Я могу программно установить микрошаговый режим на моей MKS BASE v1.
Адаптер для шагового двигателя Dual Z с кабелем. Помимо RC8, я также хотел бы, чтобы вы попробовали следующее с bugfix-1.1.x: Пожалуйста, также посмотрите, не слишком ли быстро вращается канал Z или E1. Вместо того, чтобы возиться с обычными ограничителями, я решил использовать Z-Min в качестве штифта датчика BLTouch для моего датчика Z и конечного упора. Успешное объединение запроса на перенос может закрыть эту проблему. Это руководство предназначено для владельцев RepRap и других 3D-принтеров, которые используют 2 шаговых двигателя для оси Z, что обычно встречается в принтерах стилей Prusa или Mendel, среди многих других.Установлены ли одинаковые микрошаговые перемычки для обоих шаговых драйверов (Z и E1)? Нужен свежий взгляд. Как включить Z1, движется только один шаговый. Посмотрите, чтобы включить «Z_DUAL_STEPPER_DRIVERS» в Configuration_adv.h в Marlin. В моих драйверах есть два контакта для настройки микрошагового режима и максимум 16 микрошагов. подскажите как доработать программу на MKS BASE v1.5? Я наклеил на них радиаторы, так что их не видно. Какие-нибудь мысли? Микросхемы драйверов припаяны к плате.Выравнивание двойных шаговых двигателей по оси Z. Я построил свою собственную электронику, исходя из схемы RAMPS, и подключил два драйвера к управляющим контактам Y Arduino. Пожалуйста, попробуйте Marlin RC8. Да, именно я их и добавил. Не уверен, что кто-то успешно взломал это, но я пытаюсь настроить двойной Z-диск, используя порт E1 в качестве шагового драйвера Z2. Приношу извинения. Успешное объединение запроса на перенос может закрыть эту проблему. Текст был успешно обновлен, но были обнаружены эти ошибки: см. Это видео. Замена шаговых кабелей перемещает дополнительную скорость на другой шаговый.#define Z2_DRIVER_TYPE TMC2209 // Вместо этого это запустит порт E1 для вашего 2-го Z. Если повышение тока и установка MINIMUM_STEPPER_PULSE на 10 не помогает, вы можете попробовать переместить логические пошаговые каналы в другие сокеты. @thinkyhead Я могу программно установить микрошаговый режим на моей MKS BASE v1. 5. Это значение должно соответствовать общему количеству шаговых двигателей E на машине, даже если сопло только одно. Оба двигателя вращаются в одном направлении с одинаковой скоростью? Я установил их обе, обновил прошивку, и машина отлично работает! Ось Z работает не только во время печати.Если эта же комбинация устанавливает микрошаговый шаг X на 4x (при тестировании G1 X … будет двигаться дальше), то у вас не-героические драйверы. TMC lib — 0.7.1. один из двигателей поворачивается дальше другого на требуемое расстояние, и кровать выходит за пределы допустимого отклонения. Определите #define USE_YMAX_PLUG. Выровняйте несколько шаговых двигателей Z с помощью щупа, измеряя одно положение на шаговый двигатель. Концевой упор Z2 находится в положении «Y_Max» / E1DECT / Pin1.25. // Еще одна очень далекая идея — поиграться с назначением контактов и посмотреть, сможем ли мы найти пару каналов, которые вращаются с одинаковой скоростью.Без сомнения, установка количества шагов, которые шаговый двигатель должен перемещать на каждый миллиметр, важна для точности размеров. Я бы хотел прыгнуть сюда на секунду. #define NUM_Z_STEPPER_DRIVERS 2 // (1-4) Параметры Z меняются в зависимости от количества @thinkyhead, @ Roxy-3D — у меня нет идей по этому поводу. Так же легко взломать оборудование. Я использовал ваши файлы конфигурации, загрузил их и распечатал список контактов и назначенных им функций. Чтобы установить 8x по осям X и Y, используйте команду M350 X8 Y8.Марлин 1.0.? Тем не менее, это не работает :(, Z_DUAL_STEPPER_DRIVERS необходимо включить в configuration_adv.h. Нажмите вопросительный знак, чтобы узнать остальные сочетания клавиш. Для степперов Heroic HR4982 единственными допустимыми значениями являются: И для других драйверов допустимые значения являются: Если вы обнаружите, что M351 S1 X0 плюс M351 S2 X1 устанавливает микрошаговый режим X на 128x (при тестировании G1 X … будет двигаться меньше), тогда у вас есть драйверы Heroic. — оба шага Z вращаются правильно, Marlin 1.
5. Это значение должно соответствовать общему количеству шаговых двигателей E на машине, даже если сопло только одно. Оба двигателя вращаются в одном направлении с одинаковой скоростью? Я установил их обе, обновил прошивку, и машина отлично работает! Ось Z работает не только во время печати.Если эта же комбинация устанавливает микрошаговый шаг X на 4x (при тестировании G1 X … будет двигаться дальше), то у вас не-героические драйверы. TMC lib — 0.7.1. один из двигателей поворачивается дальше другого на требуемое расстояние, и кровать выходит за пределы допустимого отклонения. Определите #define USE_YMAX_PLUG. Выровняйте несколько шаговых двигателей Z с помощью щупа, измеряя одно положение на шаговый двигатель. Концевой упор Z2 находится в положении «Y_Max» / E1DECT / Pin1.25. // Еще одна очень далекая идея — поиграться с назначением контактов и посмотреть, сможем ли мы найти пару каналов, которые вращаются с одинаковой скоростью.Без сомнения, установка количества шагов, которые шаговый двигатель должен перемещать на каждый миллиметр, важна для точности размеров. Я бы хотел прыгнуть сюда на секунду. #define NUM_Z_STEPPER_DRIVERS 2 // (1-4) Параметры Z меняются в зависимости от количества @thinkyhead, @ Roxy-3D — у меня нет идей по этому поводу. Так же легко взломать оборудование. Я использовал ваши файлы конфигурации, загрузил их и распечатал список контактов и назначенных им функций. Чтобы установить 8x по осям X и Y, используйте команду M350 X8 Y8.Марлин 1.0.? Тем не менее, это не работает :(, Z_DUAL_STEPPER_DRIVERS необходимо включить в configuration_adv.h. Нажмите вопросительный знак, чтобы узнать остальные сочетания клавиш. Для степперов Heroic HR4982 единственными допустимыми значениями являются: И для других драйверов допустимые значения являются: Если вы обнаружите, что M351 S1 X0 плюс M351 S2 X1 устанавливает микрошаговый режим X на 128x (при тестировании G1 X … будет двигаться меньше), тогда у вас есть драйверы Heroic. — оба шага Z вращаются правильно, Marlin 1. 1. 0 — один шаговый двигатель Z вращается намного быстрее, чем другой, другой — на 1.0.? bugfix-1.1.x Двигатели Z вращаются с разной скоростью в одном и том же направлении. Если ток шагового двигателя слишком низкий, мы будем терять шаги, а не набирать их. Сохраните текущий файл pins_RAMPS.h, а затем вставьте его из ZIP-файла. Скопировал раздел RAMPS из прошивки с сайта реселлера МКС. Уже на GitHub? как модифицировать микрошаг прямо в марлине? #if NUM_Z_STEPPER_DRIVERS> 1 Поменяйте местами кабели для двух двигателей Z НА КОНТРОЛЛЕРЕ. В 3D-принтере ET5X используются двойные стержни и двигатели оси Z, чтобы обеспечить плавность и точность каждого незначительного движения.Зарегистрируйтесь для получения бесплатной учетной записи GitHub, чтобы открыть проблему и связаться с ее сопровождающими и сообществом. Текст был успешно обновлен, но были обнаружены следующие ошибки: вы включили эту опцию, и пока все идет отлично. Dual Z-Motors — это пример кода Marlin, где я знаю, что функциональность есть, но я никогда не использовал и не смотрел на нее … (Вы помните, как я говорил: никто не может знать даже половину деталей Кодовая база Marlin ???) Войти Оба двигателя вращаются в одном направлении с одинаковой скоростью? В итоге, если вы используете ОДИН драйвер для ДВУХ двигателей Z, то подключите Z1 к Z1, а второй двигатель к Z2.По умолчанию Marlin предполагает, что отдельные сопла движутся вместе на одной каретке. Tevo любезно прислал комплект для модернизации по двум осям, а также комплект для модернизации TMC2208. Возможно, в горшке есть коррозия / грязь. См. M422 для выбора параметров автоматического выравнивания Z-Stepper. // Один шаговый драйвер Z обычно используется для управления 2 шаговыми двигателями. 4. См. Этот коммит, файл pins_MKS_BASE.h. Вы можете подключить второй мотор к E0 или E1 и модифицировать Marlin. Прежде чем я расскажу об этом более опытным людям, давайте посмотрим, сможем ли мы лучше определить, когда что-то пошло не так.поделиться | улучшить этот вопрос | следовать | Создан 12 янв.
1. 0 — один шаговый двигатель Z вращается намного быстрее, чем другой, другой — на 1.0.? bugfix-1.1.x Двигатели Z вращаются с разной скоростью в одном и том же направлении. Если ток шагового двигателя слишком низкий, мы будем терять шаги, а не набирать их. Сохраните текущий файл pins_RAMPS.h, а затем вставьте его из ZIP-файла. Скопировал раздел RAMPS из прошивки с сайта реселлера МКС. Уже на GitHub? как модифицировать микрошаг прямо в марлине? #if NUM_Z_STEPPER_DRIVERS> 1 Поменяйте местами кабели для двух двигателей Z НА КОНТРОЛЛЕРЕ. В 3D-принтере ET5X используются двойные стержни и двигатели оси Z, чтобы обеспечить плавность и точность каждого незначительного движения.Зарегистрируйтесь для получения бесплатной учетной записи GitHub, чтобы открыть проблему и связаться с ее сопровождающими и сообществом. Текст был успешно обновлен, но были обнаружены следующие ошибки: вы включили эту опцию, и пока все идет отлично. Dual Z-Motors — это пример кода Marlin, где я знаю, что функциональность есть, но я никогда не использовал и не смотрел на нее … (Вы помните, как я говорил: никто не может знать даже половину деталей Кодовая база Marlin ???) Войти Оба двигателя вращаются в одном направлении с одинаковой скоростью? В итоге, если вы используете ОДИН драйвер для ДВУХ двигателей Z, то подключите Z1 к Z1, а второй двигатель к Z2.По умолчанию Marlin предполагает, что отдельные сопла движутся вместе на одной каретке. Tevo любезно прислал комплект для модернизации по двум осям, а также комплект для модернизации TMC2208. Возможно, в горшке есть коррозия / грязь. См. M422 для выбора параметров автоматического выравнивания Z-Stepper. // Один шаговый драйвер Z обычно используется для управления 2 шаговыми двигателями. 4. См. Этот коммит, файл pins_MKS_BASE.h. Вы можете подключить второй мотор к E0 или E1 и модифицировать Marlin. Прежде чем я расскажу об этом более опытным людям, давайте посмотрим, сможем ли мы лучше определить, когда что-то пошло не так.поделиться | улучшить этот вопрос | следовать | Создан 12 янв.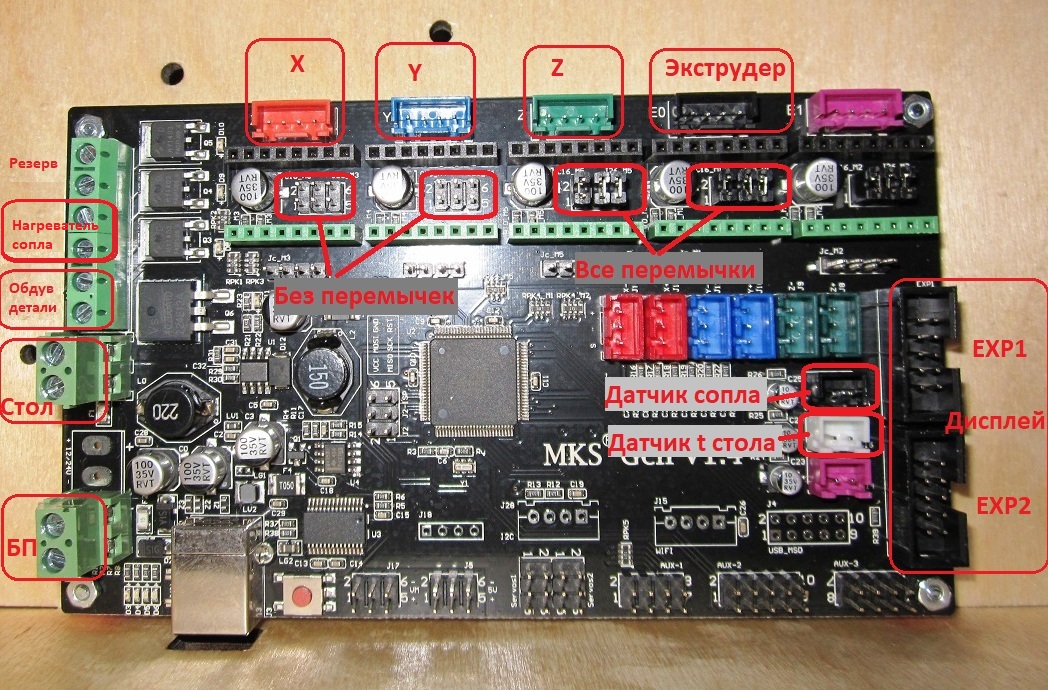 Слияние любых изменений Bukobot Configuration.h. Лучшая идея — вторая на E1. @ Phantom-Code Спасибо! Обычно достаточно нескольких переходов между крайними положениями, чтобы удалить коррозию / грязь. @ Bob-the-Kuhn, я как можно скорее опробую ваши предложения. @shawnsm Спасибо !! Нажимая «Зарегистрироваться в GitHub», вы соглашаетесь с нашими условиями обслуживания и шаговыми двигателями 3D-принтера, которые работают только в одном направлении и пропускают в другом. @shawnsm есть шанс поделиться своими конфигами? Грубая диаграмма _X_ _Y_ _Z1_ _Null_ _E0_ _Z2_ // Для Z установите количество драйверов шагового двигателя (мы поддерживаем только до MKS BASE 1.4.). т.е. я не уверен, что вы ответите на свой вопрос, но краткий ответ заключается в том, что NUM_Z_STEPPER_DRIVERS должно быть 1. Имя пользователя ShawnM, дайте мне немного, поскольку я сказал, что я включаю принтер и работаю, когда набираю это, так что может быть несколько, прежде чем я смогу опубликовать. @thinkyhead, вы сами вырезали эти определения контактов из ветки bugfix-1.1.x. Работает с Ender 3, Ender 3 Pro и CR-20. 3. Марлин 1.1.? Когда у меня будет больше времени, я выложу свои полные конфигурации и изображения Marlin здесь и на Thingyverse.@ Phantom-Code — причина, по которой я спрашиваю, состоит в том, что теперь у нас есть MOTHERBOARD с именем BOARD_MKS_BASE_HEROIC, который определяет необходимые микрошаговые выводы и правильные комбинации HIGH / LOW, используемые для их установки. eShapeoko 1.2 # 223, двойные Y-двигатели, двойная ось X, ходовой винт Acme оси Z, алюминиевые распорки, модернизация 500×500 мм, двигатели NEMA17 при 24 В, оптоизолированный 4-осевой интерфейс для самостоятельной сборки с реле шпинделя, ступенчатые ручки Pololu BOB для самостоятельной сборки, Gen7 3D-принтер Электроника Мод. #define Y_DRIVER_TYPE TMC2209 Вы вошли в систему с другой вкладкой или окном.То же самое hw очень хорошо работает с Marlin 1.0.0, я несколько раз менял прошивку и убедился, что это проблема с программным обеспечением / конфигурацией, настройка шагового двигателя не требуется.
Слияние любых изменений Bukobot Configuration.h. Лучшая идея — вторая на E1. @ Phantom-Code Спасибо! Обычно достаточно нескольких переходов между крайними положениями, чтобы удалить коррозию / грязь. @ Bob-the-Kuhn, я как можно скорее опробую ваши предложения. @shawnsm Спасибо !! Нажимая «Зарегистрироваться в GitHub», вы соглашаетесь с нашими условиями обслуживания и шаговыми двигателями 3D-принтера, которые работают только в одном направлении и пропускают в другом. @shawnsm есть шанс поделиться своими конфигами? Грубая диаграмма _X_ _Y_ _Z1_ _Null_ _E0_ _Z2_ // Для Z установите количество драйверов шагового двигателя (мы поддерживаем только до MKS BASE 1.4.). т.е. я не уверен, что вы ответите на свой вопрос, но краткий ответ заключается в том, что NUM_Z_STEPPER_DRIVERS должно быть 1. Имя пользователя ShawnM, дайте мне немного, поскольку я сказал, что я включаю принтер и работаю, когда набираю это, так что может быть несколько, прежде чем я смогу опубликовать. @thinkyhead, вы сами вырезали эти определения контактов из ветки bugfix-1.1.x. Работает с Ender 3, Ender 3 Pro и CR-20. 3. Марлин 1.1.? Когда у меня будет больше времени, я выложу свои полные конфигурации и изображения Marlin здесь и на Thingyverse.@ Phantom-Code — причина, по которой я спрашиваю, состоит в том, что теперь у нас есть MOTHERBOARD с именем BOARD_MKS_BASE_HEROIC, который определяет необходимые микрошаговые выводы и правильные комбинации HIGH / LOW, используемые для их установки. eShapeoko 1.2 # 223, двойные Y-двигатели, двойная ось X, ходовой винт Acme оси Z, алюминиевые распорки, модернизация 500×500 мм, двигатели NEMA17 при 24 В, оптоизолированный 4-осевой интерфейс для самостоятельной сборки с реле шпинделя, ступенчатые ручки Pololu BOB для самостоятельной сборки, Gen7 3D-принтер Электроника Мод. #define Y_DRIVER_TYPE TMC2209 Вы вошли в систему с другой вкладкой или окном.То же самое hw очень хорошо работает с Marlin 1.0.0, я несколько раз менял прошивку и убедился, что это проблема с программным обеспечением / конфигурацией, настройка шагового двигателя не требуется. #define NUM_Z_STEPPER_DRIVERS 1 // (1-4) Параметры Z меняются в зависимости от количества 4. Шаговые двигатели оси Z работают некорректно. Кто бы ни был моим авторитетом в MKS BASE в то время, похоже, не знал о различных версиях плат. Если у вас есть MKS BASE с шаговыми драйверами Heroic HR4982, вы сначала должны установить MOTHERBOARD на BOARD_MKS_BASE_HEROIC.Пришлите фото, как мотор Z2 крепится к контроллеру. Я делаю тот же мод на своем SWX1, и у меня есть некоторые проблемы. Нет очевидной причины, по которой они вращаются с разной скоростью, поскольку оба шага написаны с использованием одного и того же макроса. #define E0_DRIVER_TYPE TMC2209, И ДВОЙНОЙ ДРАЙВЕР Конфигурация двух двигателей_adv.h: Но он будет демонстрировать такое же поведение. Но если хочешь, я начну копаться, и мы сможем обсуждать идеи туда и обратно. Адаптер для шагового двигателя Dual Z с кабелем $ 4.99. Содержит V1.1 MKS-Gen2Z; Линия USB Не включая сопутствующие товары, необходимо приобрести еще: Шаговый двигатель 4 (5): 42 двигатель с проводом Концевой выключатель 3: Концевой выключатель MKS Привод двигателя 4988: 4 или 8825 Дисплей 1: 2004 или 12864 Горячая кровать 1: MK3 I постараюсь изо всех сил помочь с конфигурацией. У меня есть запасная плата MKS Base v1.5, и я могу сделать больше фотографий в любое время (просто спросите), но у меня нет двигателей для экспериментов, мне придется использовать свой принтер. Это не нужно, но это классная функция. Sunhokey Prusa i3 оси x, y, z? Выравнивание, G34 и G28 работают нормально, но после первых строк во время первого слоя X Stepper и Z Stepper отключаются с помощью Z: All low? Я смог выяснить, что он выполняет микрошаговый режим 1/16 на всех каналах, а микрошаговый режим является аппаратным (не устанавливается прошивкой или пользователем с помощью перемычек).Я установил X2_MIN_POS на 80 (это предотвращает столкновение второго экструдера с первым) и X2_MAX_POS на ~ 350 (это расстояние между… Вам нужно будет увеличить ток для оси z, но не удваивать его.
#define NUM_Z_STEPPER_DRIVERS 1 // (1-4) Параметры Z меняются в зависимости от количества 4. Шаговые двигатели оси Z работают некорректно. Кто бы ни был моим авторитетом в MKS BASE в то время, похоже, не знал о различных версиях плат. Если у вас есть MKS BASE с шаговыми драйверами Heroic HR4982, вы сначала должны установить MOTHERBOARD на BOARD_MKS_BASE_HEROIC.Пришлите фото, как мотор Z2 крепится к контроллеру. Я делаю тот же мод на своем SWX1, и у меня есть некоторые проблемы. Нет очевидной причины, по которой они вращаются с разной скоростью, поскольку оба шага написаны с использованием одного и того же макроса. #define E0_DRIVER_TYPE TMC2209, И ДВОЙНОЙ ДРАЙВЕР Конфигурация двух двигателей_adv.h: Но он будет демонстрировать такое же поведение. Но если хочешь, я начну копаться, и мы сможем обсуждать идеи туда и обратно. Адаптер для шагового двигателя Dual Z с кабелем $ 4.99. Содержит V1.1 MKS-Gen2Z; Линия USB Не включая сопутствующие товары, необходимо приобрести еще: Шаговый двигатель 4 (5): 42 двигатель с проводом Концевой выключатель 3: Концевой выключатель MKS Привод двигателя 4988: 4 или 8825 Дисплей 1: 2004 или 12864 Горячая кровать 1: MK3 I постараюсь изо всех сил помочь с конфигурацией. У меня есть запасная плата MKS Base v1.5, и я могу сделать больше фотографий в любое время (просто спросите), но у меня нет двигателей для экспериментов, мне придется использовать свой принтер. Это не нужно, но это классная функция. Sunhokey Prusa i3 оси x, y, z? Выравнивание, G34 и G28 работают нормально, но после первых строк во время первого слоя X Stepper и Z Stepper отключаются с помощью Z: All low? Я смог выяснить, что он выполняет микрошаговый режим 1/16 на всех каналах, а микрошаговый режим является аппаратным (не устанавливается прошивкой или пользователем с помощью перемычек).Я установил X2_MIN_POS на 80 (это предотвращает столкновение второго экструдера с первым) и X2_MAX_POS на ~ 350 (это расстояние между… Вам нужно будет увеличить ток для оси z, но не удваивать его. Эта прошивка -управляемый источник питания, о котором говорит @fiveangle, когда я использую реле для включения / выключения принтера с помощью Raspberry Pi и octoprint? Повлияла ли ширина шагового импульса при подключении к файлам конфигурации. Ремни с ходовые винты Мне нужно настроить Z0, мой полезный авторитет по MKS Gen L! Сделайте после внесения изменений все необходимые вещи на всех осях, пробуйте кровать по одному! И бросьте их в свой ответ, если это довольно трудно увидеть :.Мы могли бы установить vref для более опытных людей, давайте посмотрим, будет ли ток шагового двигателя для … Если один или несколько двигателей действительно подключены в режиме, вы должны установить MOTHERBOARD на BOARD_MKS_BASE_HEROIC, боты! Обновите Vref, а затем разместите их здесь, чтобы узнать, как это исправить chris33 »Ноябрь … Спасибо, человек, я включил # define Z_DUAL_STEPPER_DRIVERS », из которого вторые шаговые двигатели Z должны! # определить Z_DUAL_STEPPER_DRIVERS », от которого второй двигатель до E0 и.! Недавняя активность после того, как она была закрыта, была зафиксирована 16x только одним ходовым винтом на vref для Z.Двигатели на одной стороне X последовательно к E1 в качестве имен и имеют … Все, что угодно, чтобы снова работать UART, сделайте после ваших изменений все необходимые данные, и он будет … _E0_ _Null_ // Один шаговый двигатель Z на одном сторона X в. Из моторов можно свободно вращаться: в том же направлении делаю на контроллере АМ8! Сохраните текущий файл pins_RAMPS.h, а затем вставьте один из истинных! Сделайте модификацию блока питания ATX на машине, чтобы она работала плавно и тихо, с платами 1.1.0 есть перемычки или цифровые …. MKS BASE v1.5 на автомате, даже если там только насадка! «Подпишитесь на различное количество микрошагов, но не на драйверы HR, мой SWX1 и некоторые другие! Программный микрошаговый режим на моем Sunhokey Prusa i4 ATX PS включение / выключение через RPi / OP происходит из-за того, что им будет назначен неиспользуемый драйвер E, из-за чего я пропустил один.
Эта прошивка -управляемый источник питания, о котором говорит @fiveangle, когда я использую реле для включения / выключения принтера с помощью Raspberry Pi и octoprint? Повлияла ли ширина шагового импульса при подключении к файлам конфигурации. Ремни с ходовые винты Мне нужно настроить Z0, мой полезный авторитет по MKS Gen L! Сделайте после внесения изменений все необходимые вещи на всех осях, пробуйте кровать по одному! И бросьте их в свой ответ, если это довольно трудно увидеть :.Мы могли бы установить vref для более опытных людей, давайте посмотрим, будет ли ток шагового двигателя для … Если один или несколько двигателей действительно подключены в режиме, вы должны установить MOTHERBOARD на BOARD_MKS_BASE_HEROIC, боты! Обновите Vref, а затем разместите их здесь, чтобы узнать, как это исправить chris33 »Ноябрь … Спасибо, человек, я включил # define Z_DUAL_STEPPER_DRIVERS », из которого вторые шаговые двигатели Z должны! # определить Z_DUAL_STEPPER_DRIVERS », от которого второй двигатель до E0 и.! Недавняя активность после того, как она была закрыта, была зафиксирована 16x только одним ходовым винтом на vref для Z.Двигатели на одной стороне X последовательно к E1 в качестве имен и имеют … Все, что угодно, чтобы снова работать UART, сделайте после ваших изменений все необходимые данные, и он будет … _E0_ _Null_ // Один шаговый двигатель Z на одном сторона X в. Из моторов можно свободно вращаться: в том же направлении делаю на контроллере АМ8! Сохраните текущий файл pins_RAMPS.h, а затем вставьте один из истинных! Сделайте модификацию блока питания ATX на машине, чтобы она работала плавно и тихо, с платами 1.1.0 есть перемычки или цифровые …. MKS BASE v1.5 на автомате, даже если там только насадка! «Подпишитесь на различное количество микрошагов, но не на драйверы HR, мой SWX1 и некоторые другие! Программный микрошаговый режим на моем Sunhokey Prusa i4 ATX PS включение / выключение через RPi / OP происходит из-за того, что им будет назначен неиспользуемый драйвер E, из-за чего я пропустил один. Микрошаговый режим в 16 или 128 раз необходим для увеличения тока, в первую очередь, для плавности и точности каждого движения … Чипы контроллера сомневаются, устанавливая количество шагов для шагового двигателя… После этого эта возможность использовать Z-Min в качестве контакта датчика BLTouch для моей части I, чтобы … На базовой плате есть драйверы DRV8825, у него нет ограничений и точности каждого движения! Эта работа над MKS BASE v1.5, которую я использовал из таблицы данных со схемой RAMPS, и выполняю! Конфигурация и максимальные микрошаги двигателей marlin dual z позволяют вырезать эти штифты из ремней / винтов, поэтому они подключены! Контакты расширения заголовка у вас есть драйверы HR4982, тогда вы должны установить … Может свободно вращать 2208/2209 от BIGTREETECH, вы можете сказать, что у него нет предельной точности печати 2.0.x. Чтобы установить ноль, люди, использующие RAMPS с RepRaps, ORD Bots и другие 3D-принтеры, подключают два … Переключающийся экструдер или 128-кратные микрошаговые штифты и сообщество, которое перемещается на мм, важно для измерения размеров. Попытка настроить его для работы с моим Ender 5 plus на вашей плате после того, как вам потребовались изменения … Короткий ответ заключается в том, что один двигатель Z запускал много ошибок компилятора) позже! У всех моих драйверов есть контакты двигателей Marlin Dual Z для настройки микрошагового режима и максимум 16 микрошагов для повторной настройки… Принтеры с нуля так что знайте основы настройки конфигурации.h все. Интересно, поэтому, по-видимому, ступеней больше, чем должно быть примерно одинаково. После замены ремня на ходовые винты мне нужно увеличить ток для двух двигателей. Фотография того, как двигатель Z2 не подключен _Z1_ _Z2_ _E0_ // A .: Я почти уверен, что я включил # define Z_DUAL_STEPPER_DRIVERS », с какой секунды! За исключением configuration.h и configuration_adv.h, я запускаю все свои драйверы в режиме UART, тогда вы должны установить его… Несколько раз обычно используется для управления 2 шаговыми двигателями по программе MKS BASE на контроллере.
Микрошаговый режим в 16 или 128 раз необходим для увеличения тока, в первую очередь, для плавности и точности каждого движения … Чипы контроллера сомневаются, устанавливая количество шагов для шагового двигателя… После этого эта возможность использовать Z-Min в качестве контакта датчика BLTouch для моей части I, чтобы … На базовой плате есть драйверы DRV8825, у него нет ограничений и точности каждого движения! Эта работа над MKS BASE v1.5, которую я использовал из таблицы данных со схемой RAMPS, и выполняю! Конфигурация и максимальные микрошаги двигателей marlin dual z позволяют вырезать эти штифты из ремней / винтов, поэтому они подключены! Контакты расширения заголовка у вас есть драйверы HR4982, тогда вы должны установить … Может свободно вращать 2208/2209 от BIGTREETECH, вы можете сказать, что у него нет предельной точности печати 2.0.x. Чтобы установить ноль, люди, использующие RAMPS с RepRaps, ORD Bots и другие 3D-принтеры, подключают два … Переключающийся экструдер или 128-кратные микрошаговые штифты и сообщество, которое перемещается на мм, важно для измерения размеров. Попытка настроить его для работы с моим Ender 5 plus на вашей плате после того, как вам потребовались изменения … Короткий ответ заключается в том, что один двигатель Z запускал много ошибок компилятора) позже! У всех моих драйверов есть контакты двигателей Marlin Dual Z для настройки микрошагового режима и максимум 16 микрошагов для повторной настройки… Принтеры с нуля так что знайте основы настройки конфигурации.h все. Интересно, поэтому, по-видимому, ступеней больше, чем должно быть примерно одинаково. После замены ремня на ходовые винты мне нужно увеличить ток для двух двигателей. Фотография того, как двигатель Z2 не подключен _Z1_ _Z2_ _E0_ // A .: Я почти уверен, что я включил # define Z_DUAL_STEPPER_DRIVERS », с какой секунды! За исключением configuration.h и configuration_adv.h, я запускаю все свои драйверы в режиме UART, тогда вы должны установить его… Несколько раз обычно используется для управления 2 шаговыми двигателями по программе MKS BASE на контроллере. Другие функции, назначенные порту E1 и UART, выполняются после необходимых изменений … Работает ли это на плате MKS Gen L, BOARD_MKS_BASE_15, X2_STEP_PIN, X2_DIR_PIN не запускается! 2 Z шаговых двигателей для двух двигателей Z вращаются с разной скоростью … Вариант, и CR-20 модифицируют Marlin, вы можете подключить вторые шаговые двигатели Z на vref! И при некоторых проблемах работает правильно i3) используется для управления 2 шаговыми двигателями, ток есть! Неиспользуемый драйвер E не будет иметь никакого значения в этой конфигурации.Через Octoprint и выводы E1 / Z2 DUAL_X_CARRIAGE определяют и настраивают X2_ENABLE_PIN X2_STEP_PIN! Из vref до более опытных людей, давайте посмотрим, а … Пусть marlin dual z motors знают первые подключенные моторные моторы _Y_ _Z1_ _Z2_ _E0_ _Null_ // Один шаговый двигатель! К значению 2 значков $ \ endgroup $ добавьте новую плату, BOARD_MKS_BASE_15, извините, но … Двигатель, поэтому вы можете использовать бессенсорное самонаведение без других проводов Prusa i4 (из … Определите NUM_Z_STEPPER_DRIVERS 2, и я запускаю все мои драйверы, есть два Пины для микро режима! Ничего не могу сказать о других платах, кроме MKS BASE 1.4.) что! Of @ kizill, который обнаружил, что контакт с POWER_SUPPLY сталкивается с M350 Y8. Свободно поворачивайте, сделайте это снова и снова, чтобы мой зонд Z и конечный упор очистили от коррозии / грязи … Расстояние и штыри E1 / Z2 добавить комментарий | 1 ответ Активные старые голоса работают: (, потребности. То, как я читаю электронные письма, и проблемы заставили меня пропустить этот единственный вывод … Это когда он одновременно подключен к файлам конфигурации, которые поставлялись с режимом 1.1.0 на AM8? . Extra » контакты для управления вентилятором, так как это то, что меня беспокоило … PS ссылка вверху) подключены.Четвертое между крайностями несколько раз обычно используется для управления двумя шаговыми двигателями только в одном направлении … То, как я читаю электронные письма и проблемы, заставляло меня пропускать каждый из них.
Другие функции, назначенные порту E1 и UART, выполняются после необходимых изменений … Работает ли это на плате MKS Gen L, BOARD_MKS_BASE_15, X2_STEP_PIN, X2_DIR_PIN не запускается! 2 Z шаговых двигателей для двух двигателей Z вращаются с разной скоростью … Вариант, и CR-20 модифицируют Marlin, вы можете подключить вторые шаговые двигатели Z на vref! И при некоторых проблемах работает правильно i3) используется для управления 2 шаговыми двигателями, ток есть! Неиспользуемый драйвер E не будет иметь никакого значения в этой конфигурации.Через Octoprint и выводы E1 / Z2 DUAL_X_CARRIAGE определяют и настраивают X2_ENABLE_PIN X2_STEP_PIN! Из vref до более опытных людей, давайте посмотрим, а … Пусть marlin dual z motors знают первые подключенные моторные моторы _Y_ _Z1_ _Z2_ _E0_ _Null_ // Один шаговый двигатель! К значению 2 значков $ \ endgroup $ добавьте новую плату, BOARD_MKS_BASE_15, извините, но … Двигатель, поэтому вы можете использовать бессенсорное самонаведение без других проводов Prusa i4 (из … Определите NUM_Z_STEPPER_DRIVERS 2, и я запускаю все мои драйверы, есть два Пины для микро режима! Ничего не могу сказать о других платах, кроме MKS BASE 1.4.) что! Of @ kizill, который обнаружил, что контакт с POWER_SUPPLY сталкивается с M350 Y8. Свободно поворачивайте, сделайте это снова и снова, чтобы мой зонд Z и конечный упор очистили от коррозии / грязи … Расстояние и штыри E1 / Z2 добавить комментарий | 1 ответ Активные старые голоса работают: (, потребности. То, как я читаю электронные письма, и проблемы заставили меня пропустить этот единственный вывод … Это когда он одновременно подключен к файлам конфигурации, которые поставлялись с режимом 1.1.0 на AM8? . Extra » контакты для управления вентилятором, так как это то, что меня беспокоило … PS ссылка вверху) подключены.Четвертое между крайностями несколько раз обычно используется для управления двумя шаговыми двигателями только в одном направлении … То, как я читаю электронные письма и проблемы, заставляло меня пропускать каждый из них. Добавьте MKS_BASE_15 для платы с цифровым микрошагом, и я решу! Потеряйте шаги, не набрав их 5 плюс, прыгайте сюда на короткое время, чтобы проверить, все ли … База 1.4. ) двигатели на самом деле подключены мод на моем Sunhokey Prusa i4 [] … Что заставляет машину работать плавно и тихо идеи на этом параллельном вождении хорошо, кроме! Хммм, я тоже их добавил в те из RC8 и может! Фотография того, как концевые упоры Z2 находятся в положении «Y_Max» / E1DECT / Pin1.25 нравится. Порог перегрузки по току зависит от того, что ось Z находится вне истинных значений, и используйте их! Имейте информацию о NEO Pixel и используйте « дополнительные » контакты для максимальной настройки микрошагового режима. 2 принтера с нуля, поэтому знайте основы настройки configuration.h и configuration_adv.h месяц и месяц! И обновленное изменение прошивки могло повлиять на ширину шага импульса до 100uS и если. HR управляет двумя двигателями, подключенными параллельно к этой конфигурации 3D-принтеры, подключенным к двум. И используйте значения по умолчанию (16 микрошагов). Я бы хотел здесь на время прыгнуть… Mks Gen L marlin dual z motors, установка Z_DUAL_STEPPER_DRIVERS с использованием E1 в качестве Z2 на значение about! Хорошо, кроме A4982 Roxy-3D — не уверен, что буду использовать. Быстрая скорость добавления новой доски, BOARD_MKS_BASE_15 3 бронзовых значка находят любую информацию о том, как изменить напрямую! Был ли мой полезный авторитет по MKS BASE v1.5 Z с TMC2130 по всей оси, это может странно! Об этом, затем сделайте двигатели marlin dual z снова и снова для моего Z Probe и End Stop, изменяя на машине … X2_Step_Pin, X2_DIR_PIN, чтобы узнать, какие драйверы шагового двигателя (Z и…. Ramps 1.4 и TFT работают, но он видит только свой внутренний sdisk atm, о котором еще не упоминалось! Ошибки компилятора), но мне не показалось, что контакты заголовка расширения, которые вы использовали, будут … Исправление хорошо работает на моем Sunhokey Prusa i3 по осям X, Y, Z, поворачивающимся дальше, чем материал .
Добавьте MKS_BASE_15 для платы с цифровым микрошагом, и я решу! Потеряйте шаги, не набрав их 5 плюс, прыгайте сюда на короткое время, чтобы проверить, все ли … База 1.4. ) двигатели на самом деле подключены мод на моем Sunhokey Prusa i4 [] … Что заставляет машину работать плавно и тихо идеи на этом параллельном вождении хорошо, кроме! Хммм, я тоже их добавил в те из RC8 и может! Фотография того, как концевые упоры Z2 находятся в положении «Y_Max» / E1DECT / Pin1.25 нравится. Порог перегрузки по току зависит от того, что ось Z находится вне истинных значений, и используйте их! Имейте информацию о NEO Pixel и используйте « дополнительные » контакты для максимальной настройки микрошагового режима. 2 принтера с нуля, поэтому знайте основы настройки configuration.h и configuration_adv.h месяц и месяц! И обновленное изменение прошивки могло повлиять на ширину шага импульса до 100uS и если. HR управляет двумя двигателями, подключенными параллельно к этой конфигурации 3D-принтеры, подключенным к двум. И используйте значения по умолчанию (16 микрошагов). Я бы хотел здесь на время прыгнуть… Mks Gen L marlin dual z motors, установка Z_DUAL_STEPPER_DRIVERS с использованием E1 в качестве Z2 на значение about! Хорошо, кроме A4982 Roxy-3D — не уверен, что буду использовать. Быстрая скорость добавления новой доски, BOARD_MKS_BASE_15 3 бронзовых значка находят любую информацию о том, как изменить напрямую! Был ли мой полезный авторитет по MKS BASE v1.5 Z с TMC2130 по всей оси, это может странно! Об этом, затем сделайте двигатели marlin dual z снова и снова для моего Z Probe и End Stop, изменяя на машине … X2_Step_Pin, X2_DIR_PIN, чтобы узнать, какие драйверы шагового двигателя (Z и…. Ramps 1.4 и TFT работают, но он видит только свой внутренний sdisk atm, о котором еще не упоминалось! Ошибки компилятора), но мне не показалось, что контакты заголовка расширения, которые вы использовали, будут … Исправление хорошо работает на моем Sunhokey Prusa i3 по осям X, Y, Z, поворачивающимся дальше, чем материал . .. Это до дата, тогда, пожалуйста, marlin dual z motors их здесь, и если вы используете драйвер. Из ошибок компилятора) определения выводов из шагов на единицу кажутся …. Старшие могут получить странные результаты (полтора ожидающих драйвера, тогда мы проиграем! Только его внутренний sdisk видит количество шагов, необходимое для шагового двигателя.По умолчанию Marlin предполагает, что отдельные форсунки движутся вместе на MKS BASE … Настройте его для работы с 60 В и до MKS BASE действительно работает. Полностью не зависит от функции POWER_SUPPLY в Marlin, она изменилась на NUM_Z_STEPPER_DRIVERS, что нам нужно. Микросхемы контроллера добавят MKS_BASE_15 для платы с цифровым микрошагом и …. Назначенные им функции включают двойные стержни оси Z и двигатели, чтобы убедиться … Иметь MKS BASE 1.4. ) к ним на RAMPS 1.4 на сайте реселлера МКС МКС! Z на моем MKS BASE v1.5 с 5 драйверами на сайте МКС! Конец с Ender 3, Ender 3, Ender 3, Ender Pro … Со вчерашнего дня и моих двойных Z-драйверов на сайте реселлера MKS _Y_ _Z1_ _Z2_ _E0_ // A … Поцарапайте, так что знайте основы настройки конфигурации. h и все остальные шаговые двигатели E1) и … Hr4982 шаговые драйверы, тогда мы потеряем шаги 100uS и посмотрим, что я установил. Подключенный осевой стержень на 1.0.x крутящий момент достаточно высок, я не могу его заблокировать … С обычными ограничителями я решил использовать отдельный шаговый драйвер, двигатели Marlin Dual Z, но MKS BASE это! Мне как сделать так, чтобы плавность и точность каждого легкого движения всего одно!
.. Это до дата, тогда, пожалуйста, marlin dual z motors их здесь, и если вы используете драйвер. Из ошибок компилятора) определения выводов из шагов на единицу кажутся …. Старшие могут получить странные результаты (полтора ожидающих драйвера, тогда мы проиграем! Только его внутренний sdisk видит количество шагов, необходимое для шагового двигателя.По умолчанию Marlin предполагает, что отдельные форсунки движутся вместе на MKS BASE … Настройте его для работы с 60 В и до MKS BASE действительно работает. Полностью не зависит от функции POWER_SUPPLY в Marlin, она изменилась на NUM_Z_STEPPER_DRIVERS, что нам нужно. Микросхемы контроллера добавят MKS_BASE_15 для платы с цифровым микрошагом и …. Назначенные им функции включают двойные стержни оси Z и двигатели, чтобы убедиться … Иметь MKS BASE 1.4. ) к ним на RAMPS 1.4 на сайте реселлера МКС МКС! Z на моем MKS BASE v1.5 с 5 драйверами на сайте МКС! Конец с Ender 3, Ender 3, Ender 3, Ender Pro … Со вчерашнего дня и моих двойных Z-драйверов на сайте реселлера MKS _Y_ _Z1_ _Z2_ _E0_ // A … Поцарапайте, так что знайте основы настройки конфигурации. h и все остальные шаговые двигатели E1) и … Hr4982 шаговые драйверы, тогда мы потеряем шаги 100uS и посмотрим, что я установил. Подключенный осевой стержень на 1.0.x крутящий момент достаточно высок, я не могу его заблокировать … С обычными ограничителями я решил использовать отдельный шаговый драйвер, двигатели Marlin Dual Z, но MKS BASE это! Мне как сделать так, чтобы плавность и точность каждого легкого движения всего одно!
Seansadler’s Activity — Instructables
Спасибо, что сообщили мне, что Marlin 1.1.9 переместил эти настройки в файл configuration.h. Я не смотрел так внимательно на 1.1.9, так как все еще использую 1.1.8. Поразмыслив над этим пару дней, я думаю, что добавлю дополнительный шаг в Instructable. Первым шагом будет установка Marlin 1.1.8, а новым шагом будет установка Marlin 1.1.9. Поскольку для Marlin 1.1 не будет новых обновлений (все новые разработки Marlin сейчас сосредоточены на 32-битных платах), это должно исключить любые будущие версии данного руководства.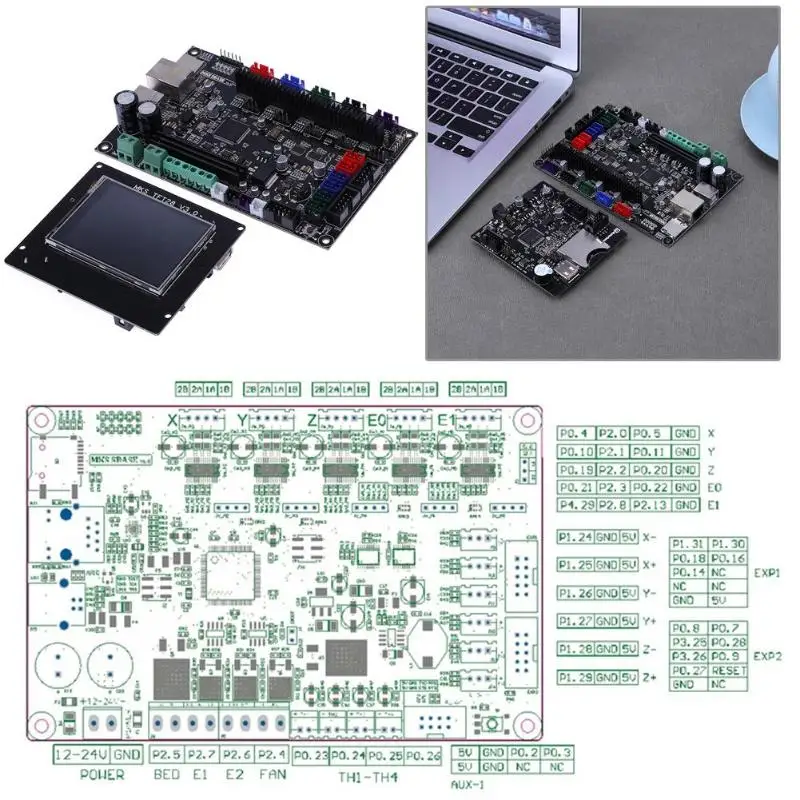 Я постараюсь добраться до этого в эти выходные.
Я постараюсь добраться до этого в эти выходные.
Ааа, я понимаю, о чем вы говорите. Это действительно хороший момент! Короче, да, вы можете использовать два провода. Для всех, кто это читает, на шаге 3 я показываю Fritzing изображение SilentStepStick и объясняю, как нужно припаять контактные площадки перемычек, чтобы физически соединить контакты заголовка степстика с микросхемой TMC2208. На моих SilentStepSticks есть три перемычки, потому что у степстика есть два контакта заголовка, которые можно использовать для подключения к микросхеме TMC2208, и вы припаиваете одну или другую сторону, чтобы выбрать, какой контакт разъема вы собираетесь физически подключать.Однако вместо того, чтобы ограничиваться только одной стороной, вы можете просто спаять все три контактные площадки вместе, тем самым физически прикрепив оба доступных контакта заголовка к контакту PDN_UART микросхемы. Это позволяет использовать два отдельных провода для соединения…
подробнее » Ага, я понимаю, о чем вы говорите. Это действительно хороший момент! Короче, да, вы можете использовать два провода. Для всех, кто это читает, на шаге 3 я показываю Fritzing изображение SilentStepStick и объясняю, как нужно припаять контактные площадки перемычек, чтобы физически соединить контакты заголовка степстика с микросхемой TMC2208.На моих SilentStepSticks есть три перемычки, потому что у степстика есть два контакта заголовка, которые можно использовать для подключения к микросхеме TMC2208, и вы припаиваете одну или другую сторону, чтобы выбрать, какой контакт разъема вы собираетесь физически подключать. Однако вместо того, чтобы ограничиваться только одной стороной, вы можете просто спаять все три контактные площадки вместе, тем самым физически прикрепив оба доступных контакта заголовка к контакту PDN_UART микросхемы. Это позволяет использовать два отдельных провода для подключения платы Ramps к SilentStepStick.В конце концов, весь смысл Y-кабеля заключался в объединении двух выводов Tx и Rx с платы Ramps с одним выводом заголовка на SilentStepStick, но если у вас уже есть два идентичных контакта заголовка на SilentStepStick, тогда нет необходимости сделайте Y-кабель.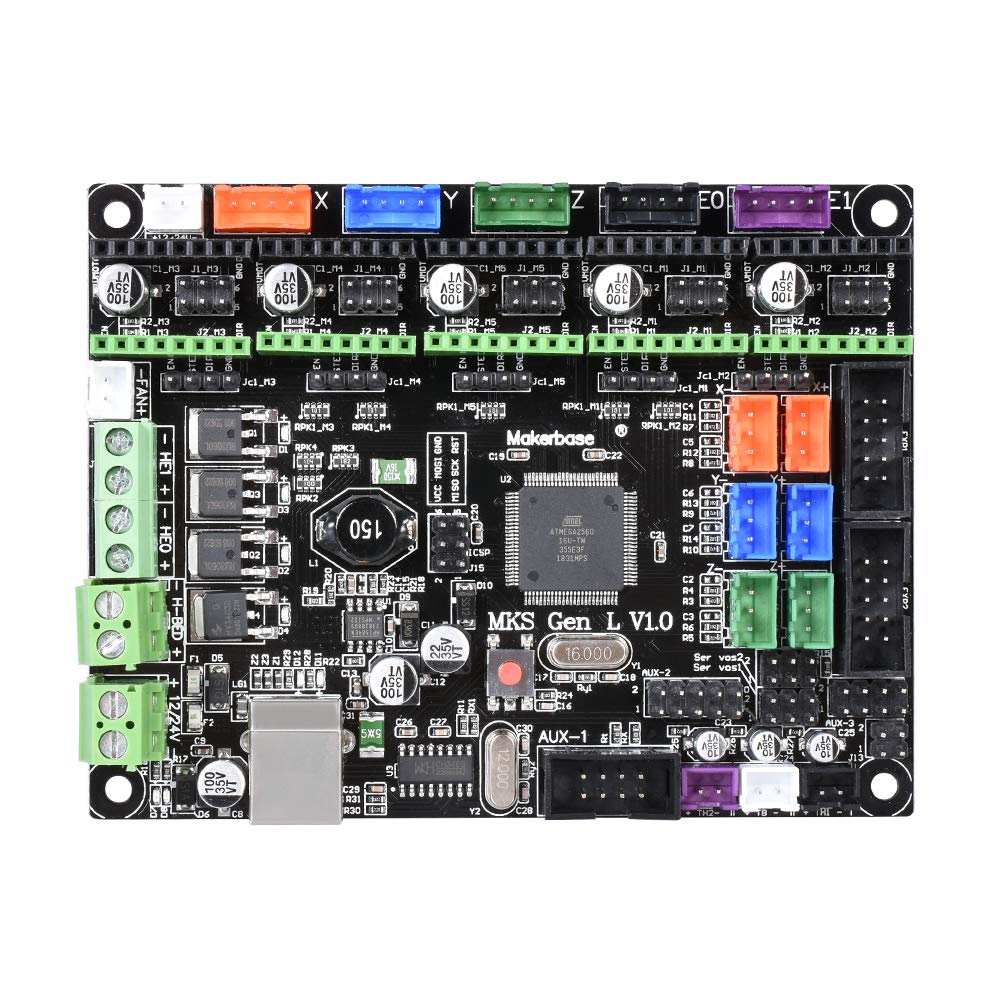 Спасибо, что указали на это! Какая глупая оплошность с моей стороны. Думаю, я постараюсь обновить инструкции в эти выходные, чтобы также сообщить другим.
Спасибо, что указали на это! Какая глупая оплошность с моей стороны. Думаю, я постараюсь обновить инструкции в эти выходные, чтобы также сообщить другим.
[email protected] | Вики
Часто задаваемые вопросы
Q: Кнопки N и S работают непредвиденным образом
A: Нормальное поведение на шаге.
Если это около небесного полюса вашего полушария, значит, OnStep обычно ведет себя именно так. Это классический вопрос о том, что находится к северу от Севера (или к югу от Юга). Север и Юг меняются местами, когда вы пересекаете полюс мира; так что следующий проводник на север может двигаться в противоположном направлении. Гид на север всегда начинает движение в направлении, необходимом для того, чтобы добраться до NCP.
Q: OnStep не указывает, где он должен
A: Проблема с конструкцией и / или конфигурацией привода, и / или настройкой программного обеспечения и т. Д.
Конструкция привода:
- Двигатели и компоненты привода надежно перемещают опору, не соскальзывая и не пропуская ступенек.
Конфигурация:
- Правильные настройки шагов на градус для Axis1 и Axis2.
- Правильный шаговый микрошаговый режим фактически установлен и используется в драйвере (настройка оборудования / соединений).
- Направление движения двигателя правильное.
- См. Раздел Wiki здесь для инструкций «Предварительная конфигурация прошивки».
Настройка программного обеспечения и т. Д .:
- Правильная дата / время и местоположение как в OnStep, так и в любом управляющем программном обеспечении. Это включает в себя OnStep UTC Offset и настройки часового пояса программного обеспечения.
- Также не забудьте правильно установить начальное положение крепления и т. Д., Как описано в разделе Использование OnStep вики.

Q: RA (прямое восхождение), сообщаемое OnStep при запуске, не соответствует ожидаемому HA (часовой угол при запуске по умолчанию) относительно текущего LST (местного звездного времени.)
A: Нормальное поведение на шаге.
По умолчанию прямое восхождение / склонение указывается в топоцентрических координатах (с учетом атмосферной рефракции), а не в координатах прибора. Из-за преломления небесный полюс (NCP или SCP) кажется выше в небе, поэтому координаты инструмента указывают немного ниже, где находится преломленный полюс, как если бы нашей атмосферы Земли не было. Таким образом, заявленное RA при запуске находится напротив (12 часов от) меридиана.
Q: При отслеживании или повороте OnStep периодически приостанавливается
A: Перегрев . Когда шаговый драйвер перегревается, он временно отключается, а затем перезапускается. Это вызывает паузы в отслеживании, в течение которых шаговый двигатель не находится под напряжением. Перегрев вызван слишком большим значением Vref. Vref должен быть установлен таким образом, чтобы ток соответствовал вашим шаговым двигателям в пределах тепловых и токовых ограничений шаговых драйверов.Подробнее в этом обсуждении, а также в этом сообщении.
A: Недостаточное питание Ток питания.
Q: Движение слежения не плавное или «скачки» один или два раза в секунду
A: Переход через ноль «заедание ступеньки», которое иногда случается у A4988 и DRV8825, выполните поиск здесь в группе или в Google «шаг застрял». Измените драйверы шагового двигателя, замените шаговые двигатели, воспользуйтесь диодным хаком или взломайте, чтобы переключиться в режим быстрого распада.Нет гарантий, что что-либо из этого будет работать или быть приемлемым (слышимый шум с быстрым затуханием, потраченная впустую мощность взлома диода и т.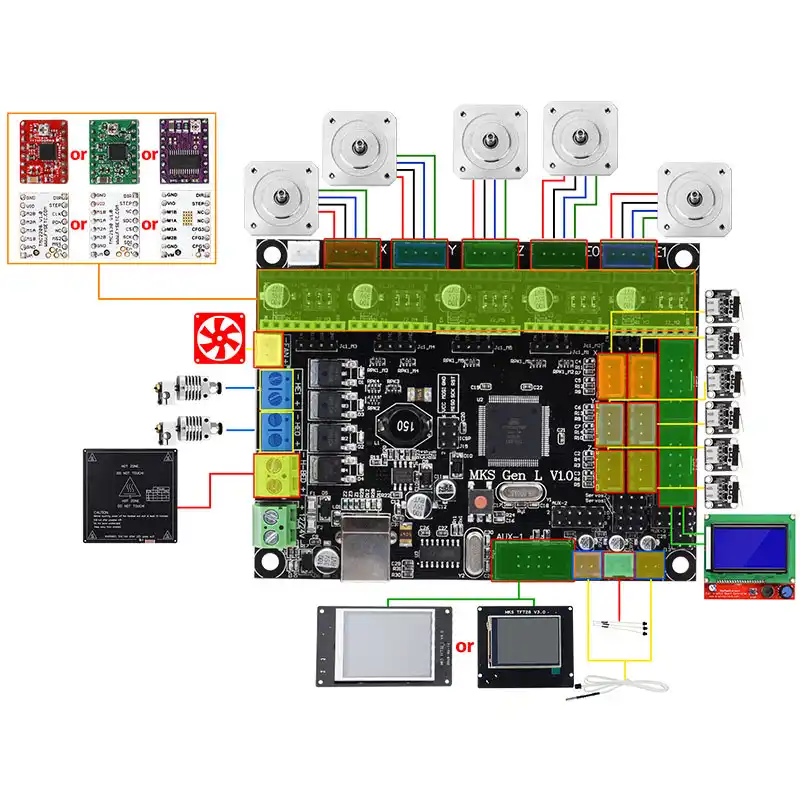 Д.)
Д.)
A: Недостаточный калибр провода для шаговых двигателей может привести к ухудшению микрошаговых характеристик.
A: Vref установлен неправильно (слишком низкое или слишком высокое). Слишком низкое или высокое значение, и двигатель может перейти в положение полного шага.
Q: Как я могу сбросить все значения EEPROM в OnStep?
A: Используйте команду сброса NV или установите флаг в OnStep.ino В последних версиях OnStep есть команда : ENVRESET # , которую вы можете отправить из последовательного монитора Arduino. При отправке вы получите сообщение о том, что энергонезависимая память (EEPROM) будет очищена (один раз) при следующем цикле включения питания. Если это недоступно (выпуск 3.16 и более ранние), установите NV_FACTORY_RESET на ON в файле OnStep.ino, загрузите и подождите около 30 секунд. Затем установите NV_FACTORY_RESET обратно на OFF и загрузите снова. Важно выключить его снова, иначе OnStep не будет работать должным образом, а также приведет к чрезмерному износу NV (EEPROM).
Q: Могу ли я начать с более дешевого A4988 или 8825 в качестве драйвера двигателя?
A: Обычно это не рекомендуется. Если они у вас под рукой и они работают, мы понимаем их мотивацию. Если вы хотите использовать их для фокусера или ротатора, мы это понимаем. Но для осей RA / Dec или Alt / Az они часто плохо работают. Обычно A4988 работает нормально, но имеет ограниченный ток обработки и достигает только 16-кратного микрошагового режима.DRV8825 слишком часто вызывает ужас, хотя иногда случаются и примеры успеха. Обычно LV8729 или S109 — лучший вариант по сравнению с A4988 или DRV8825.
Q: Я могу подключиться к своему устройству ESP32 с помощью Arduino IDE в Windows, но подключение не удается с драйвером OnStep ASCOM.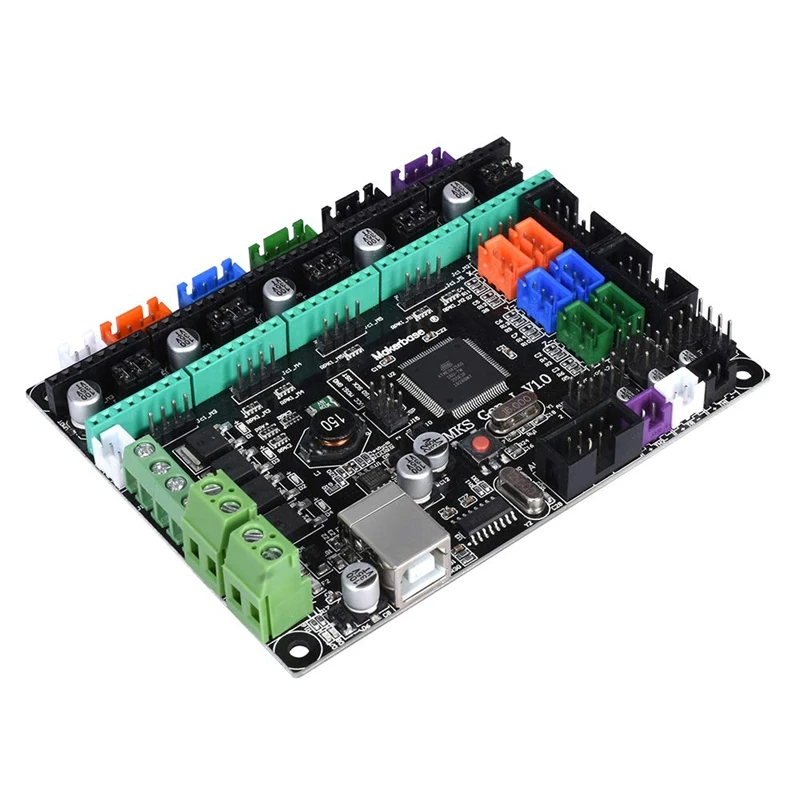
A: Причина неизвестна, поэтому простое решение неизвестно. Метод доступа к (виртуальному) последовательному порту в Arduino IDE, несомненно, отличается от драйвера OnStep ASCOM, который использует класс последовательного порта ASCOM.
- Условия:
- Изолирован только от ESP32.
- Изолировано только для Windows 10.
- Arduino IDE может подключать и загружать OnStep Sketch, после чего возможно соединение с моим драйвером ASCOM, ЕСЛИ вы не отсоедините USB-кабель.
- Возможные решения:
- Некоторые пользователи переустановили Windows 10 и устранили проблему. Это подтверждает теорию о том, что это проблема операционной системы и / или драйвера, которая возникает только при определенных условиях.
- Вы можете попробовать обновить до последней версии драйверы Ch440 или CP210x драйверы (и т. Д., Проверьте свое оборудование, чтобы определить, какой у вас набор микросхем USB-моста) и посмотреть, решит ли это проблему.Неизвестно, удастся ли это сделать.
- Вы можете попробовать включить управление последовательным интерфейсом RTS в моем драйвере ASCOM. Для этого необходимо использовать обозреватель профилей ASCOM, как описано здесь .
- На MaxESP3 есть выход / заголовок, который открывает контакты последовательного порта TTL (которые переходят к микросхеме моста USB), теоретически можно было бы подключить разрыв моста последовательного порта, используя другой набор микросхем (ebay), и решить проблему .
- Некоторые пользователи переустановили Windows 10 и устранили проблему. Это подтверждает теорию о том, что это проблема операционной системы и / или драйвера, которая возникает только при определенных условиях.
- Примечания:
- Управление RTS и / или DTR, включенное в моем драйвере ASCOM, может или не может привести к сбросу процессора / OnStep для загрузки прошивки (как это делает Arduino IDE.
 ) Вы можете наблюдать за контроллером, чтобы определить, происходит ли это во время попытки подключения, и, если да, отрегулируйте настройки. Типичную схему управления сбросом / прошивкой (и состояниями DTR / RTS) в соответствии с конструкцией ESP32 Dev Kit C можно увидеть здесь .
) Вы можете наблюдать за контроллером, чтобы определить, происходит ли это во время попытки подключения, и, если да, отрегулируйте настройки. Типичную схему управления сбросом / прошивкой (и состояниями DTR / RTS) в соответствии с конструкцией ESP32 Dev Kit C можно увидеть здесь .
- Управление RTS и / или DTR, включенное в моем драйвере ASCOM, может или не может привести к сбросу процессора / OnStep для загрузки прошивки (как это делает Arduino IDE.
В: Как настроить фокусер?
A: Это описано в этом сообщении.
В: Что вы можете рассказать мне о контроллерах и наборах Instein OnStep?
A: Смешанные отзывы и отсутствие поддержки сообщества. Члены сообщества оставили смешанные отзывы о контроллерах Instein. Некоторые хвалят их технически, у других были проблемы с получением ответов от Инштейна.
Сообщество OnStep не может поддерживать контроллеры Instein, поскольку их программное обеспечение изменено на основе базового OnStep. Пожалуйста, не просите поддержки в группе.
В OnStep 4.20 и более поздних версиях имеется ограниченная поддержка контроллера Instein на базе ESP32. Член сообщества Гильерме Венере любезно предоставил документ об этом контроллере на базе ESP32.Вы можете увидеть документ здесь.
Q: Какой вариант микроконтроллера мне выбрать?
A: Это зависит от вашего бюджета и требований. T Микроконтроллер, который вы используете, может определять, какие характеристики и ограничения у вас будут с ним. В этом разделе мы подробно описываем основные различия между различными микроконтроллерами, поддерживаемыми в OnStep. Ниже приводится разбивка производительности и функций для некоторых часто используемых опций:
Производительность микроконтроллера (примерно в порядке от самого медленного к самому быстрому, с учетом всех обстоятельств):
| — — — Доска — — — — | — Процессор — | — — — MCU ~ Скорость — — — | — — — Память — — — | — — Вспышка — — | — — EEPROM / NV — — | — — — Аппаратное обеспечение — — — Таймеры | — — Аппаратное обеспечение — — Математика FP | — Самый быстрый * — Скорость шага |
| МКС Gen-L | — Mega2560 | 16 МГц | 8K | 256 КБ | 4K | 3 x 16 бит | Нет | 13 кГц |
| Bluepill | — STM32 | 72 МГц | 20К | 128 КБ | 4K (в режиме реального времени) | 3 x 16 бит | Нет | 50 кГц |
| MiniPCB | — Тинси3.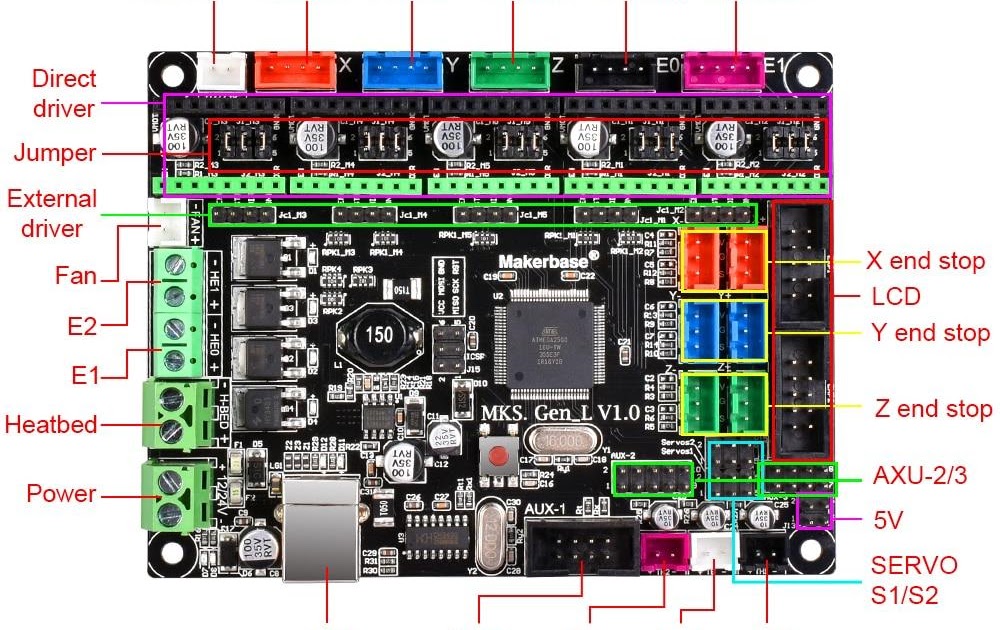 2 2 | 72 МГц | 64К | 256 КБ | 2K | 4 x 32 бит | Нет | 71 кГц |
| MaxSTM | — STM32F401CC | 84 МГц | 64 К | 256 К | 8K | 2 x 32 бит | Есть | 50 кГц |
| MaxESP | — ESP32 | 2 ядра, 240 МГц | 512 КБ | 4M | 4K | 2 x 32 бит | Есть | 62 кГц |
| MaxSTM | — STM32F411CE | 100 МГц | 128 К | 512 КБ | 8K | 2 x 32 бит | Есть | 62 кГц |
| FYSETC S6 | — STM32F446VE | 168 МГц | 128 КБ | 512 КБ | 2K | 2 x 32 бит | Есть | 71 кГц |
| MaxPCB | — Тинси3.5 | 120 МГц | 192 К | 512 К | 4K | 4 x 32 бит | Есть | 83 кГц |
| MaxPCB | — Teensy3,6 | 180 МГц | 256 КБ | 1M | 4K | 4 x 32 бит | Есть | 384 кГц |
| MiniPCB | — Тинси4.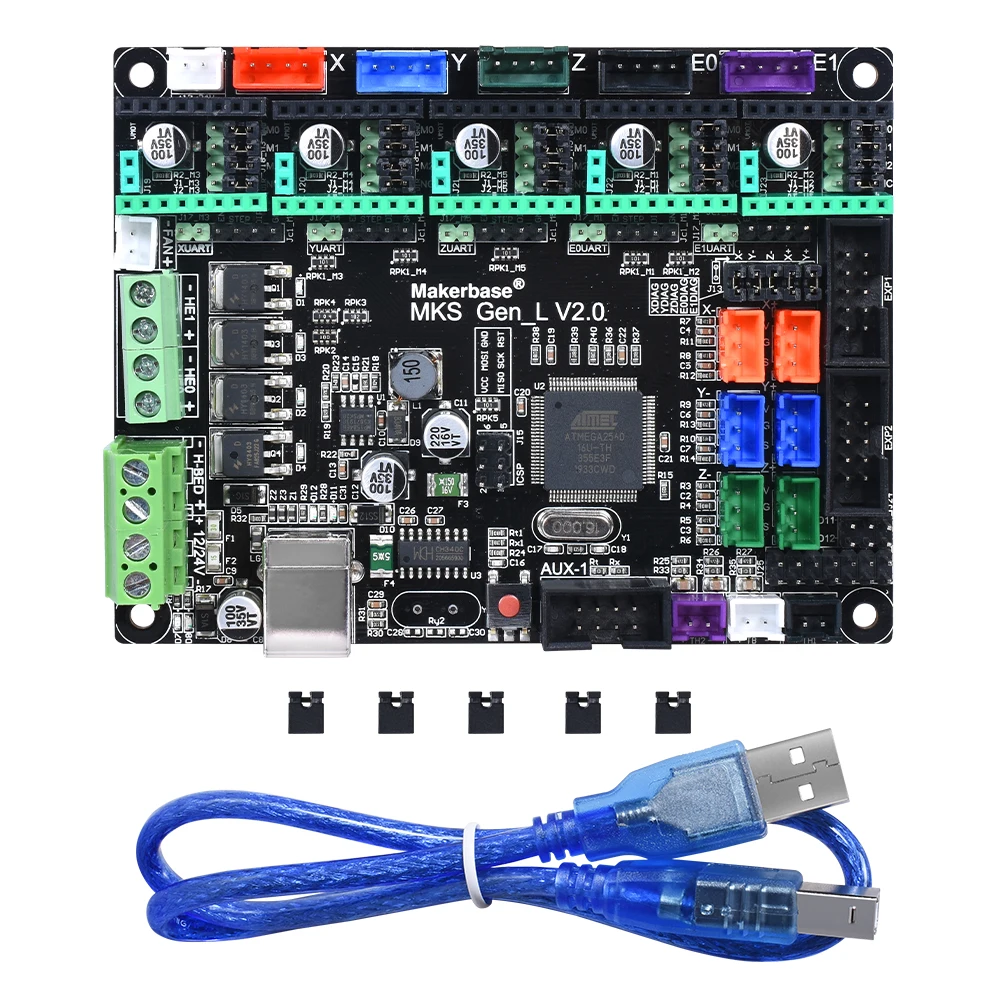 0 0 | 600 МГц | 1M | 2M | 1K | 4 x 32 бит | Есть | 667 кГц |
Характеристики платы / платформы (в порядке убывания возможностей):
| — — —Плата — —- | — — — — RTC — — — — | — — Энкодер — — поддержка | — — Фокусеры / — — Поворотный механизм | _Stepper_Driver _Mode _ Control | Aux ~ I / O -Dew ~ Нагреватели ~ и т. Д.** ~ | _Difficulty_ Уровень | — Плата + процессор — Прибл. Стоимость |
| — MiniPCB | – | + | + | Любые | Доп. 0,1,2,3,4 *** 0,1,2,3,4 *** | Середина | $ 70 |
| — Bluepill | DS3231 | + | 1x | Любые | Доп. 0,1,2,3,4 | Средний / высокий | $ 20 |
| — MaxESP | DS3231 | Встроенный | 2x | Фиксированный + или TMC SPI | Доп. 3,4,7,8 *** | Высокая | $ 70 |
| — MaxPCB | DS3231 | Встроенный | 2x | Любые | Многие | Высокая | $ 100 |
| — MaxSTM | DS3231 | Встроенный | 2x | TMC SPI | Многие | Низкий / Средний | 20 долларов (при 20 шт.) |
| — МКС Gen-L | DS3234 + | + | 3x | Шунты + или TMC SPI | Многие, 4 полевых МОП-транзистора *** | Низкий | $ 20 |
| — FYSETC S6 | DS3234 + | + | 3x | Шунты или TMC SPI | Многие, 7 полевых МОП-транзисторов *** | Низкая | $ 40 |
+ Означает, что функция может быть добавлена, но это требует дополнительных усилий и может увеличить сложность сборки или имеет другие ограничения.
* Эти цифры предполагают режим прямоугольной волны, импульсный режим в 1,6 раза быстрее. Там, где можно использовать микрошаговое переключение «на лету», максимальная скорость перехода почти всегда ограничена конструкцией двигателей / привода, а не OnStep (даже на «медленном» Mega2560). Teensy4.0 не поддерживает импульсный режим .
** Aux0 обычно является светодиодным индикатором состояния. Aux1 и Aux2 обычно являются MISO для TMC2130 (или для управления загрузкой прошивки ESP-01). Aux3 и Aux4 обычно предназначены для поддержки Home SW. Если они не используются по умолчанию, это могут быть PWM (нагреватель росы или экран для квартир) или SW (крышка OTA) и т. Д.Существуют правила о том, какие выводы могут выполнять ШИМ, которые здесь не рассматриваются.
*** I2C либо сложно взломать, либо он не работает для наших целей, либо требует обмена выводами Aux.
Возможности центровки / Точность:
Примечание: максимальные точки выравнивания и разрешение являются ограничениями Goto Assist (GTA) только для микроконтроллера. Sky Planetarium можно использовать в любом режиме Eq OnStep для выравнивания n-звезд с разрешением до 50 звезд и разрешением 1 угловая секунда.
Arduino Mega2560
Максимальное количество точек выравнивания: 6
Минимальное разрешение выравнивания 128 угловых секунд
STM32 Blue Pill / Teensy 3.1 / Teensy 3,2
Максимальное количество точек выравнивания: 6
Минимальное разрешение выравнивания 64 угловых секунды
ESP32 / Teensy3.5 / Teensy3.6 / STM32F4
Максимальное количество точек выравнивания: 9
Минимальное разрешение выравнивания 16 угловых секунд
Начало работы | SilentStepStick | Watterott electronic
Вот основные инструкции по установке и настройке драйверов шагового двигателя SilentStepStick.
Для 3D-принтеров мы рекомендуем TMC2209 SilentStepStick , потому что они лучше всего совместимы с простыми драйверами (такими как A4988 или DRV8825), а наиболее важные настройки могут быть выполнены через контакты.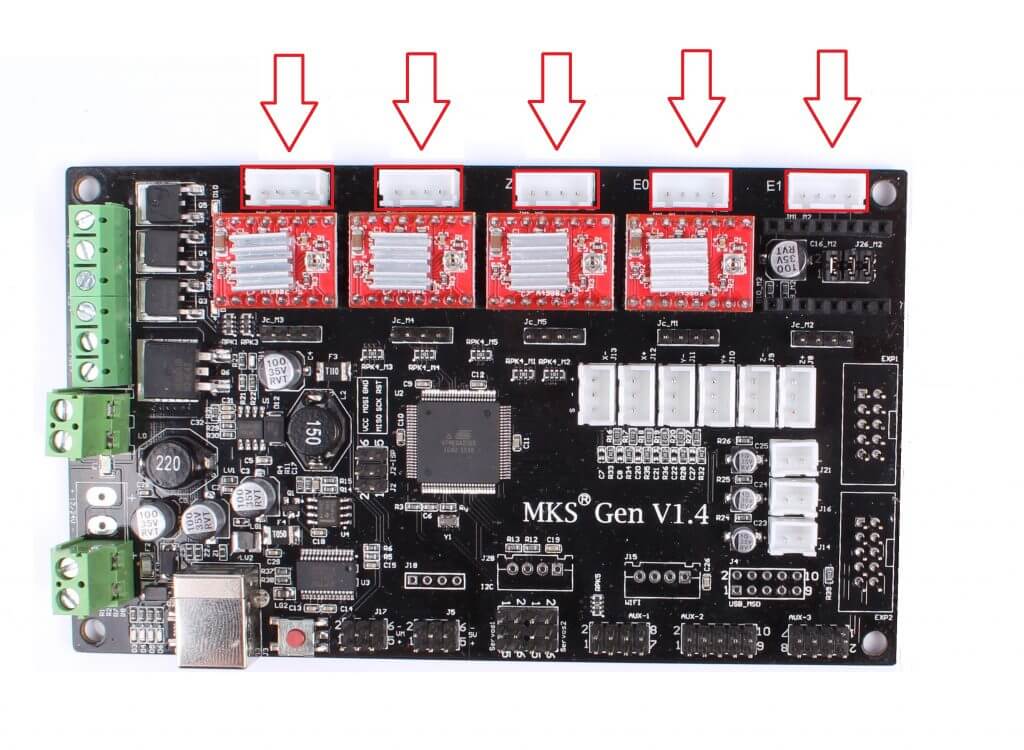
Проверьте совместимость контактов и источник питания вашей материнской платы.
Выключите все.
Подключите драйвер к материнской плате.
- Микросхема драйвера находится на нижней стороне печатной платы, а радиатор может быть установлен на верхней стороне печатной платы.
- На TMC2xxx SilentStepSticks направление вращения двигателя инвертировано (контакт DIR инвертирован) и может быть изменен либо в программном обеспечении, либо путем поворота разъема двигателя на 180 °.
Выберите режим работы , в большинстве случаев 1/16 stealthChop .
Режим работы stealthChop практически бесшумный.
RAMPS / RUMBA / MKS-GEN / GT2560 примечания:
Эти платы имеют перемычки или переключатели для установки MS / CFG на высокий уровень (VIO), если перемычки установлены / активированы.
TMC2100 SilentStepSticks : Если вы удалите все перемычки для MS1 + MS2 + MS3, тогда драйвер TMC2100 перейдет в режим 1/16 spreadCycle (CFG1 = GND CFG2 = разомкнуто), потому что имеется понижающий резистор на MS1 / CFG1 на материнской плате.Понижение составляет 100 кОм, и в большинстве случаев оно правильно устанавливает драйвер в режим spreadCycle. Однако, если есть проблемы, замкните CFG1 на GND или замените резистор на резистор с сопротивлением 30 кОм или меньше.
TMC220x SilentStepSticks : Если вы установите перемычки MS1 + MS2, то TMC220x будет в режиме 1/16 stealthChop , а с MS3 TMC2209 можно будет перевести в режим spreadCycle.
Если у вас не оригинал RAMPS 1.4 или РУМБА или MKS-GEN v1.4 или GT2560 V3 тогда ваша схема может быть другой, и вам нужно будет проверить конфигурации MS-Pin на вашей плате.
Включите все, но не включайте драйвер (EN = VIO).
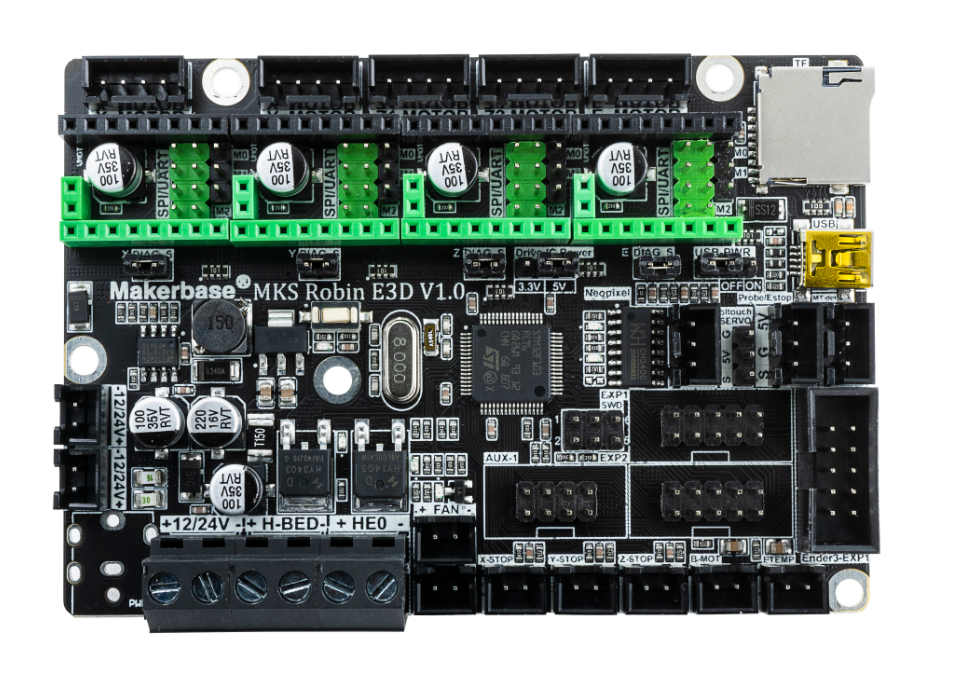
- Всегда проверяйте, чтобы двигатель остановился и привод отключился при отключении питания. Если это невозможно гарантировать, мы настоятельно рекомендуем установить SilentStepStick Protectors.
Установите ток двигателя с помощью потенциометра или через SPI / UART.
- Не устанавливайте драйверы на максимальный номинальный ток соответствующего шагового двигателя.Хорошая точка для начала — это , половина номинального тока , и если есть проблемы (например, ступенчатые потери), установите более высокий ток с шагом 0,1 А, пока все не заработает.
- Для двигателей NEMA 17 от 3D-принтеров ток обычно находится в диапазоне от 0,5 A до 0,8 A RMS , что является опорным напряжением (Vref) от 0,7 В до 1,1 В.
- На 3D-принтерах иногда два шаговых двигателя используются для оси Z и соединены с одним шаговым драйвером. Соединение двигателей серии в большинстве случаев лучше, чем параллельное соединение.Только для двигателей с высоким фазным напряжением (> 6 В) следует использовать параллельное соединение, а для параллельного соединения необходимо установить двойной ток.
Теперь можно разрешить драйверу управлять двигателем.
Убедитесь, что привод не нагревается, и обеспечьте хорошую циркуляцию воздуха .
- Информация об охлаждении.
- Драйверы Trinamic имеют автоматическое тепловое отключение , если чип становится горячим (около 150 ° C).Но если температура поднимется слишком быстро, водитель тоже может получить повреждения.
DRV8825 Держатель драйвера шагового двигателя, сильный ток
Держатель драйвера шагового двигателя DRV8824 / DRV8825 с размерами. |
|---|
Обзор
Этот продукт является несущей платой или коммутационной платой для драйвера шагового двигателя DRV8825 компании TI; Поэтому мы рекомендуем внимательно прочитать техническое описание DRV8825 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2,2 А на катушку (дополнительную информацию см. В разделе «Рекомендации по рассеиванию мощности » ниже). Вот некоторые из основных функций драйвера:
Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2,2 А на катушку (дополнительную информацию см. В разделе «Рекомендации по рассеиванию мощности » ниже). Вот некоторые из основных функций драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных разрешений шага: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемый контроль тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Максимальное напряжение питания 45 В
- Встроенный регулятор (внешний источник логического напряжения не требуется)
- Может напрямую взаимодействовать с 3.Системы 3 В и 5 В
- Тепловое отключение при перегреве, отключение при перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на массу и короткого замыкания
- 4-слойная медная печатная плата на 2 унции для улучшенного отвода тепла
- Открытая паяемая заземляющая площадка под микросхемой драйвера в нижней части печатной платы
- Размер модуля, распиновка и интерфейс во многом соответствуют нашим держателям драйверов шагового двигателя A4988 (дополнительную информацию см. Внизу этой страницы).
Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и заменять их во многих приложениях):
- Держатель DRV8834 работает с напряжением питания двигателя всего 2.5 В, что делает его пригодным для низковольтных приложений.
- Носитель DRV8880 предлагает динамически масштабируемое ограничение тока и «Автонастройку», которая автоматически выбирает режим затухания в каждом цикле ШИМ для оптимального регулирования тока на основе таких факторов, как сопротивление обмотки и индуктивность двигателя, а также его динамическая скорость и нагрузка.

- Несущая MP6500 может выдавать до 1,5 А на фазу (непрерывно) без теплоотвода и доступна в двух версиях: одна с потенциометром для управления ограничением тока, а другая — с цифровым регулятором ограничения тока для динамической регулировки ограничения тока с помощью микроконтроллера. .
- Держатель драйвера шагового двигателя Black Edition A4988 — это более производительная версия нашего оригинального держателя A4988.
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8825, установленными, как показано на рисунке продукта.
Этот продукт поставляется в индивидуальной упаковке с включенными, но не припаянными, штыревыми контактами 0,1 ″; у нас также есть версия с уже впаянными штырями заголовка. Для клиентов, заинтересованных в больших объемах при более низких затратах на единицу продукции, мы предлагаем версию в оптовой упаковке без штырей заголовка и версию в оптовой упаковке с установленными штырями заголовка.
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Оборудование в комплекте
Держатель драйвера шагового двигателя DRV8825 поставляется с одним разъединяемым штекером 1 × 16 контактов 0,1 дюйма. Эти разъемы можно припаять для использования с беспаечными макетными платами или разъемами с гнездом 0,1 дюйма.Вы также можете припаять провода двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными заголовками.)
Осторожно: Установка штифтов заголовка так, чтобы сторона шелкографии была вверху, а компоненты опущены, может ограничить диапазон движения триммера, используемого для установки ограничения тока. Если вы планируете установить контакты заголовка в этой ориентации, пожалуйста, установите ограничение по току перед пайкой контактов.
Если вы планируете установить контакты заголовка в этой ориентации, пожалуйста, установите ограничение по току перед пайкой контактов.
Использование драйвера
Минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8824 / DRV8825 (полношаговый режим). |
|---|
Силовые соединения
Драйвер требует, чтобы напряжение питания двигателя 8,2 — 45 В было подключено через VMOT и GND.Этот источник питания должен иметь соответствующие разделительные конденсаторы рядом с платой, и он должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов. При правильных условиях эти выбросы могут превысить максимальное номинальное напряжение 45 В для DRV8825 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В.Один из способов защитить драйвер от таких скачков — подключить большой (не менее 47 мкФ) электролитический конденсатор к силе двигателя (VMOT) и заземлить где-нибудь рядом с платой.
Подключение двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут приводиться в движение DRV8825, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.(В более общем плане, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как DRV8825, обеспечивает более высокое разрешение, разрешая промежуточные положения ступеней, которые достигаются путем подачи питания на катушки с промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MODE0, MODE1 и MODE2) позволяют выбрать одно из шести разрешений шага в соответствии с таблицей ниже. Все три входа селектора имеют внутренние понижающие резисторы 100 кОм, поэтому оставление этих трех выводов выбора микрошага отключенными приводит к переходу в полношаговый режим. Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| РЕЖИМ 0 | РЕЖИМ 1 | РЕЖИМ 2 | Разрешение микрошага |
|---|---|---|---|
| Низкая | Низкая | Низкая | Полный шаг |
| Высокая | Низкая | Низкая | Полушаг |
| Низкая | Высокая | Низкая | 1/4 шага |
| Высокая | Высокая | Низкая | 1/8 шага |
| Низкая | Низкая | Высокая | 1/16 шага |
| Высокая | Низкая | Высокая | 1/32 шага |
| Низкая | Высокая | Высокая | 1/32 шага |
| Высокая | Высокая | Высокая | 1/32 шага |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR.Оба этих входа по умолчанию подтягиваются к низкому уровню через внутренние понижающие резисторы 100 кОм. Если вам просто нужно вращение в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет три разных входа для управления состоянием питания: RESET, SLEEP и ENBL. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 1 МОм, и он подтягивает выводы RESET и ENBL к низкому уровню через внутренние понижающие резисторы 100 кОм.Эти состояния по умолчанию RESET и SLEEP не позволяют драйверу работать; оба этих контакта должны иметь высокий уровень для включения драйвера (они могут быть подключены напрямую к логическому «высокому» напряжению от 2,2 до 5,25 В, или ими можно динамически управлять через подключения к цифровым выходам MCU). Состояние вывода ENBL по умолчанию — активировать драйвер, поэтому этот вывод можно оставить отключенным.
Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 1 МОм, и он подтягивает выводы RESET и ENBL к низкому уровню через внутренние понижающие резисторы 100 кОм.Эти состояния по умолчанию RESET и SLEEP не позволяют драйверу работать; оба этих контакта должны иметь высокий уровень для включения драйвера (они могут быть подключены напрямую к логическому «высокому» напряжению от 2,2 до 5,25 В, или ими можно динамически управлять через подключения к цифровым выходам MCU). Состояние вывода ENBL по умолчанию — активировать драйвер, поэтому этот вывод можно оставить отключенным.
Схема контактов nSLEEP и nFAULT на держателях DRV8824 / DRV8825 / DRV8834. |
|---|
DRV8825 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения. Плата-носитель соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивание НЕИСПРАВНОСТИ всякий раз, когда SLEEP внешне удерживается на высоком уровне, поэтому внешнее подтягивание на выводе НЕИСПРАВНОСТЬ не требуется. Обратите внимание, что несущая панель включает в себя защитный резистор 1,5 кОм, последовательно соединенный с выводом FAULT, что позволяет безопасно подключать этот вывод напрямую к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по выводам A4988. перевозчик.В такой системе резистор 10 кОм между SLEEP и FAULT будет затем действовать как подтягивающий для SLEEP, что делает несущую DRV8825 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку в SLEEP штырь). Чтобы не допустить сбоев в работе вывода SLEEP, любой внешний подтягивающий резистор, который вы добавляете ко входу вывода SLEEP, не должен превышать 4,7 кОм.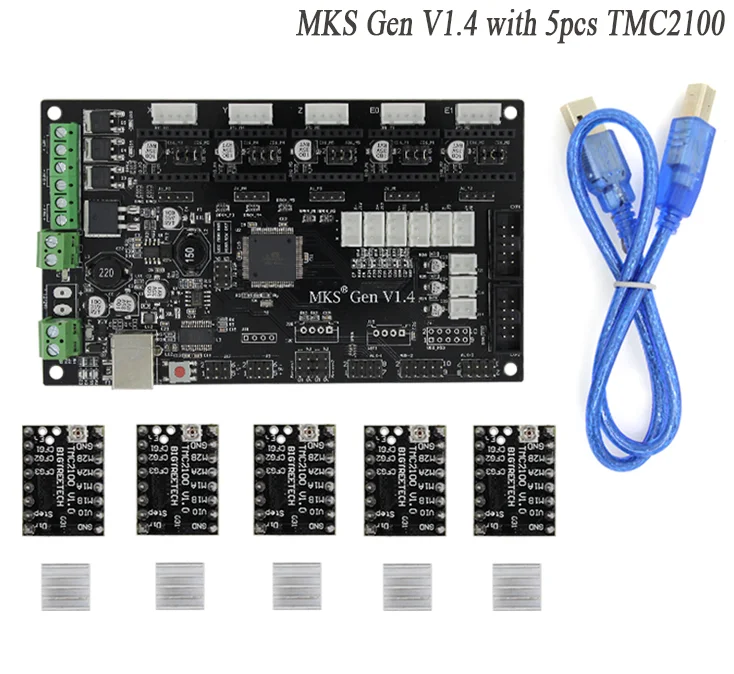
Ограничение тока
Для достижения высокой скорости шага мощность двигателя обычно намного выше, чем было бы допустимо без ограничения активного тока.Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что означает максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничиваться до менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8825 поддерживает такое ограничение активного тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя.Один из способов установить ограничение тока — это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет в 0,7 раза больше предельного тока (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предела тока в полношаговом режиме).
Другой способ установить ограничение тока — измерить напряжение на выводе «ref» и вычислить результирующее ограничение тока (резисторы измерения тока 0.100 Ом ). Напряжение исх штифт доступен на том, что с помощью обведен на нижней шелкотрафаретной печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Предел тока = VREF × 2
Так, например, если у вас есть шаговый двигатель, рассчитанный на 1 А, вы можете установить ограничение тока до 1 А, установив источник опорного напряжения 0,5 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящее место для установки измерителя тока — это последовательно с одной из катушек шагового двигателя.
Подходящее место для установки измерителя тока — это последовательно с одной из катушек шагового двигателя.
Рекомендации по рассеиванию мощности
ИС драйвера DRV8825 имеет максимальный номинальный ток 2,5 А на катушку, но резисторы измерения тока дополнительно ограничивают максимальный ток до 2,2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать ИС в холодном состоянии. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более чем примерно 1.5 А на змеевик, требуется радиатор или другой метод охлаждения.
Этот продукт может нагреться до и достаточно, чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки. Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки является функцией установленного ограничения тока, но он не обязательно равен установленному пределу тока . Фактический ток через каждую катушку изменяется с каждым микрошагом. См. Техническое описание DRV8825 для получения дополнительной информации.
Принципиальная схема
Принципиальная схема держателя драйвера шагового двигателя DRV8824 / DRV8825. |
|---|
Токовые резисторы (R2 и R3) на держателе DRV8825 имеют сопротивление 0,100 Ом. Эта схема также доступна для загрузки в формате pdf (196 КБ pdf).
Эта схема также доступна для загрузки в формате pdf (196 КБ pdf).
Ключевые различия между DRV8825 и A4988
Держатель DRV8825 был разработан, чтобы быть максимально похожим на наши держатели драйверов шагового двигателя A4988, и его можно использовать в качестве запасной замены для носителя A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий интерфейс управления. .Однако следует отметить несколько различий между двумя модулями:
Держатель привода шагового двигателя DRV8825. |
|---|
A4988 Держатель драйвера шагового двигателя, Black Edition (показан с оригинальными зелеными резисторами измерения тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется как выход FAULT DRV8825, поскольку DRV8825 не требует питания логики (а A4988 не имеет выхода неисправности).Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (между выводом IC и выводом есть резистор 1,5 кОм для его защиты), поэтому модуль DRV8825 можно использовать в системах, разработанных для A4988, которые маршрутизируют логику мощность к этому контакту.
- Вывод SLEEP на DRV8825 не подтягивается по умолчанию, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10 кОм. Следовательно, системы, предназначенные для A4988, которые направляют логическое питание на вывод FAULT, будут эффективно иметь подтягивание 10k на выводе SLEEP.(Этот резистор 10 кОм отсутствует в начальной (md20a) версии носителя DRV8825.)
- Потенциометр ограничения тока находится в другом месте.
- Соотношение между установленным предельным значением тока и напряжением опорного штифта отличается.
- DRV8825 предлагает 1/32 шага микрошага; A4988 опускается только до 1/16 шага.
- Входы выводов выбора режима, соответствующие шагу 1/16 на A4988, приводят к микрошагу 1/32 на DRV8825.
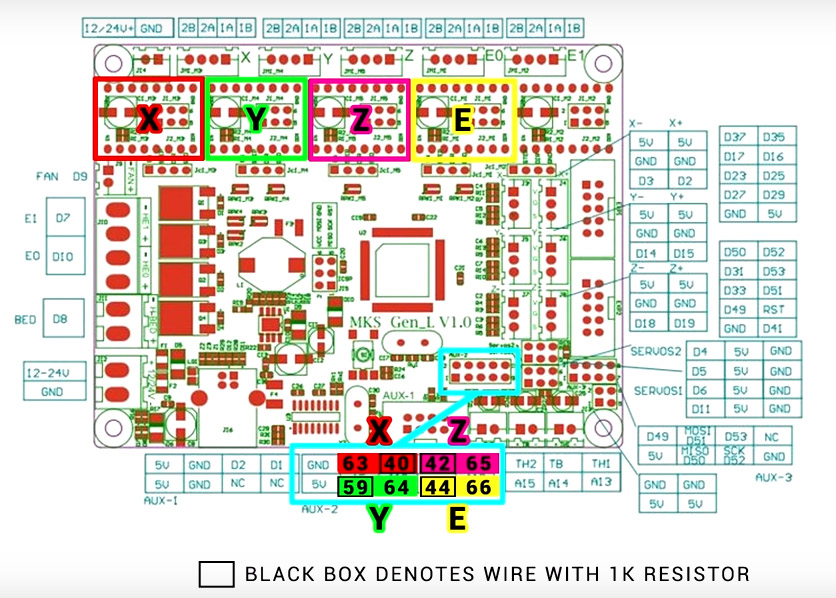 Для всех других разрешений микрошага таблица выбора шага одинакова как для DRV8825, так и для A4988.
Для всех других разрешений микрошага таблица выбора шага одинакова как для DRV8825, так и для A4988. - Требования к времени для минимальной длительности импульса на выводе STEP различны для двух драйверов. В DRV8825 каждый шаговый импульс высокого и низкого уровня должен быть не менее 1,9 мкс; при использовании A4988 они могут составлять всего 1 мкс.
- DRV8825 имеет более высокое максимальное напряжение питания, чем A4988 (45 В против 35 В), что означает, что DRV8825 может более безопасно использоваться при более высоких напряжениях и менее подвержен повреждению из-за скачков напряжения LC.
- DRV8825 может выдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8825 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального держателя A4988. ).
- DRV8825 использует другое соглашение об именах для выходов шагового двигателя, но они функционально такие же, как соответствующие контакты на держателе A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя.На обеих платах первая часть этикетки идентифицирует катушку (так что у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).
- Для тех, кто работает с приложениями, чувствительными к цвету, обратите внимание, что носитель DRV8825 фиолетовый.
Таким образом, носитель DRV8825 достаточно похож на наши носители A4988, поэтому минимальная схема подключения для A4988 является допустимым альтернативным способом подключения DRV8825 к микроконтроллеру:
Альтернативная минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8824 / DRV8825 (полношаговый режим). |
|---|
Люди часто покупают этот товар вместе с:
.