
принцип работы, виды и сравнение двигателей
Наша жизнь стала уже просто немыслима без различных электромоторов. Пылесосы, стиральные машины, холодильники вентиляторы, кондиционеры, даже часы — все эти приборы снабжены электродвигателями. Если прибор подключается к домашней электрической сети, то, вероятнее всего, в нем стоит однофазный асинхронный двигатель 220В.
- Принцип действия
- Трехфазный синхронный двигатель
- Трехфазный асинхронный двигатель
- Механическая характеристика
- Однофазный асинхронный двигатель
- Пуск
- Скорость вращения
- Схемы подключения
- Сравнение двигателей
- Синхронный
- Асинхронный
- Однофазный асинхронный
Принцип действия
Всем нам на школьных уроках физики демонстрировали опыты с проволочной рамкой, помещенной в поле постоянного магнита. Если через рамку пропустить ток, то на проводники в правой и левой части рамки будет действовать силы Ампера, создающие вращающий момент, и рамка с током будет поворачиваться до тех пор, пока она не займет положение, в котором действующие силы уравновешивают друг друга.
Если заставить поле вращаться, рамка с током будет вращаться вместе с ним. На этом принципе основана работа синхронного электродвигателя. Рамка с магнитами — аналог электрического двигателя. Вращающаяся рамка с током — ротор. Неподвижные магниты — статор.
Трехфазный синхронный двигатель
Теперь надо заставить неподвижный статор создать вращающееся магнитное поле.
Для начала заменим постоянные магниты катушками с током обмотками статора. Катушка с током создает такое же магнитное поле, как и магнит. Разместим на статоре не одну катушку-магнит, а три, повернув их на 120 градусов относительно друг друга. Подадим на эти обмотки переменный ток со сдвигом фаз на 120 градусов. Именно так сдвинуты фазы в трехфазной сети.
Результирующее магнитное поле есть результат векторного сложения трех полей. Суммарный вектор магнитной индукции будет вращаться с частотой переменного тока. За один период магнитное поле, создаваемое статором трехфазного двигателя, совершает полный оборот. Ротор, который аналогичен катушке с током, поворачивается вместе с магнитным полем статора с той же скоростью. Таким образом ротор синхронного двигателя вращается частотой питающего переменного тока.
Ротор, который аналогичен катушке с током, поворачивается вместе с магнитным полем статора с той же скоростью. Таким образом ротор синхронного двигателя вращается частотой питающего переменного тока.
Синхронные двигатели обладают самыми лучшими характеристиками, развивают максимальную мощность и обеспечивают высокий КПД. Однако там тяжелый ротор с обмотками, который сложно балансировать. К обмоткам ротора надо подводить ток, а это требует применения крайне ненадежного щеточного узла. В общем, синхронный двигатель — это хорошо, но сложно, дорого и не очень надежно.
Трехфазный асинхронный двигатель
Замкнем концы рамки накоротко. Получим один короткозамкнутый виток. Наш трехфазный статор создает вращающееся магнитное поле. Пусть это поле и создает ток в короткозамкнутом роторе.
Когда поле статора вращается относительно неподвижной рамки, оно создает в ее контуре переменный магнитный поток. По закону электромагнитной индукции  Ток создает вращающий момент, и рамка поворачивается вслед за магнитным полем, как и в синхронном двигателе.
Ток создает вращающий момент, и рамка поворачивается вслед за магнитным полем, как и в синхронном двигателе.
Но есть одно принципиальное отличие. В синхронном двигателе ротор вращается одновременно, то есть синхронно с полем статора. Ротор относительно поля статора неподвижен.
В асинхронном двигателе ротор пытается догнать вращающееся поле, но всегда немного отстает, как бы скользит относительно него. Если вдруг скорость вращения ротора точно сравняется со скоростью поля, то в роторе перестанет наводиться ток индукции.
Разность частот вращения магнитного поля и ротора асинхронного двигателя называется скольжением. Именно оно обеспечивает наличие тока в роторе.
Асинхронные электродвигатели уступают синхронным по всем характеристикам
, но значительно проще, легче, надежнее и дешевле. Практически все электрические двигатели, применяемые сегодня в промышленности — это асинхронные трехфазные двигатели.Механическая характеристика
Механическая характеристика двигателя — это зависимость момента на валу от скорости вращения.
Как уже было сказано, скорость вращения ротора в асинхронном двигателе всегда отличается от скорости вращения поля статора на величину скольжения.
Скольжение S = (n1- n2)/n1, где n1 — это скорость вращения поля, а n2 — скорость вращения ротора.
Характеристика показывает, что двигатель может работать в пяти режимах:
- Холостой ход.
- Пуск.
- Двигательный режим.
- Режим рекуперации.
- Генераторный режим.
В режиме холостого хода скольжение S равно 0. Ротор вращается синхронно с магнитным полем, как в синхронном двигателе, а момент вращения равен 0. Режим холостого хода — чисто гипотетический и никогда не реализуется на практике.
В момент пуска ротор еще неподвижен и S=1. Момент вращения при S=1 называется пусковым моментом.
После пуска ротор входит в двигательный режим и начинает раскручиваться, постепенно догоняя магнитное поле. В двигательном режиме 1 > S > 0.
Если ротор вдруг каким-то образом обгонит поле, то наступит режим рекуперации. При этом двигатель отдает энергию в сеть. В режиме рекуперации S < 0.
При этом двигатель отдает энергию в сеть. В режиме рекуперации S < 0.
S > 1 соответствует генераторному режиму. В генераторном режиме ротор движется навстречу потоку и генерирует электрический ток.
S = Sn соответствует номинальному режиму. Номинальное значение скольжения составляет обычно 2−8%.
Однофазный асинхронный двигатель
Можно еще упросить трехфазный асинхронный двигатель .
Оставим на статоре всего одну обмотку и подадим туда однофазный электрический ток. У нас получился однофазный асинхронный двигатель. В этом двигателе поле статора неподвижно — в этом принципиальное отличие однофазного двигателя от многофазного. Тем не менее такой двигатель работает.
Однофазный двигатель не может стартовать самостоятельно. Ничего особенного в этом нет. Привычный нам двигатель внутреннего сгорания тоже надо сначала раскрутить. В автомобиле мы пользуемся дополнительным электродвигателем — стартером, а в бензопиле делаем это вручную, дергая пусковой шнур.
Если однофазный двигатель подтолкнуть, причем в любую сторону, он разгонится и будет поддерживать вращение в заданном направлении.
Ели ротору придать вращение в определенном направлении, он будет двигаться попутно с одним полем и навстречу другому.
Двигатель можно представить как два трехфазных мотора, насаженных на один вал, но включенных во встречном направлении. При запуске вал неподвижен и моторы уравновешивают друг друга.
Если вал раскрутить внешней силой в каком-то направлении, то один мотор, запущенный в попутном направлении, окажется в двигательном режиме, а другой — в генераторном. Механическая характеристика показывает, что крутящий момент в двигательном режиме больше, чем в генераторном, поэтому попутный мотор перетягивает.
Пуск
Для запуска однофазного электромотора на его статоре наматывают дополнительную пусковую обмотку перпендикулярно основной и подают в нее ток со сдвигом по фазе. Для сдвига фазы последовательно с обмоткой включают фазосдвигающий элемент. В качестве фазосдвигающего элемента можно использовать резистор, дроссель или конденсатор. В любом случае полное комплексное сопротивление в цепях основной и пусковой обмоток будет разным, и токи получат фазовый сдвиг.
В качестве фазосдвигающего элемента можно использовать резистор, дроссель или конденсатор. В любом случае полное комплексное сопротивление в цепях основной и пусковой обмоток будет разным, и токи получат фазовый сдвиг.
Чаще всего для сдвига фаз используют конденсатор.
Скорость вращения
В сетях наших энергоснабжающих компаний используется переменное напряжение 220/380 с частотой 50 Гц. Причем частота переменного тока 50 Гц поддерживается с точностью до 2 процентов. Как нам уже известно, ротор синхронного электромотора вращается с частотой переменного тока. То есть при частоте питающей сети 50 Гц ротор совершает 50 оборотов в секунду или 3000 оборотов в минуту. Обмотку статора можно разделить на секции и сделать мотор многополюсным. В многополюсном моторе скорость понижается с ростом числа полюсов и в общем случае равна 3000/ p оборотов, где p — это число полюсов.
Таким образом скорость вращения сетевого электромотора в нашей стране не может быть выше 3000 оборотов в минуту. В странах, где принята частота сети в 60 Гц, например, в США, электромоторы крутятся с максимальной скоростью в 3600 оборотов в минуту. И здесь мы снова отстаем от Америки.
В странах, где принята частота сети в 60 Гц, например, в США, электромоторы крутятся с максимальной скоростью в 3600 оборотов в минуту. И здесь мы снова отстаем от Америки.
В синхронном электромоторе обороты не зависят от нагрузки. При росте нагрузки ротор синхронной машины отстает от поля на больший угол, но частота вращения не меняется.
В асинхронном режиме величина скольжения зависит от нагрузки. Таким образом, при увеличении нагрузки скорость асинхронного электромотора падает.
Схемы подключения
Пусковая обмотка, включенная со сдвигом по фазе, поворачивает магнитное поле и превращает на время запуска однофазный электродвигатель в двухфазный.
Дополнительная обмотка не рассчитана на длительную работу и после выхода на рабочий режим должна быть отключена. Отключение производится либо вручную кнопкой, либо центробежным выключателем, либо тепловым реле по нагреву пусковой обмотки.
В однофазном двигателе в рабочем режиме магнитное поле статора неподвижно. В этом его главное отличие от многофазного.
Иногда ошибочно называют однофазными электромоторы, дополнительная обмотка которых подключена через конденсатор постоянно.
В однофазную сеть можно подключить и трехфазный мотор, если одну из фазных обмоток подключить через конденсатор. Так что, если в вашем распоряжении вдруг оказался промышленный трехфазный электромотор, вы можете использовать его в однофазной домашней сети, хотя и с потерей мощности и более низким КПД.
Сравнение двигателей
Синхронный
- На роторе есть обмотка, в которую подается ток.
- Частота вращения вала совпадает или кратна частоте питающей сети.
- Скорость стабильна и не меняется под нагрузкой.
Асинхронный
- Ротор не подключен к источнику тока.
- Частота вращения вала ниже частоты сети на величину скольжения.
- Скорость снижается с ростом нагрузки.

Однофазный асинхронный
- Единственная обмотка на статоре.
- Вращается в любом направлении.
- Не запускается самостоятельно.
Однофазный синхронный двигатель принцип работы и устройство
Содержание
- Устройство, работа и применение синхронного электродвигателя
- Область применения
- Особенности, устройство и принцип работы синхронного двигателя простым языком
- Устройство
- Принцип работы
- Типы синхронных двигателей
- Режимы работы
- Принцип работы синхронного двигателя
- Принцип работы синхронного двигателя
- Строение синхронного двигателя
- Принципы работы синхронного двигателя
- Способы запуска
- Применение
- Устройство и принцип действия синхронного двигателя
- Отличие от асинхронного мотора
- Конструкция мотора
- Как работает двигатель
- Синхронные генераторы
- Полюсы обмоток двигателя
- Воздействие полюсов
- Запуск электродвигателей синхронного типа
- Более современный способ разгона
- Преимущества и недостатки синхронных моторов
Устройство, работа и применение синхронного электродвигателя
Синхронный двигатель является электрической машиной, работающей в сети переменного тока. Синхронными электрические машины называются потому, что частота вращения вала ротора точно соответствует частоте магнитного поля, индуцируемого статором.
Синхронными электрические машины называются потому, что частота вращения вала ротора точно соответствует частоте магнитного поля, индуцируемого статором.
Как любая вращающаяся электрическая машина, синхронный двигатель состоит из ротора, в данном случае являющегося индуктором и статора, именуемого также якорем. На роторе (индукторе) выполнена обмотка возбуждения, которая питается напряжением постоянного тока через коллекторный механизм. На статоре намотана обмотка переменного тока, которая образует магнитное поле. Само же магнитное поле движеся по кругу, то есть. вращается При взаимодействии с полем индуктора создает вращающий электромагнитный момент на роторе.
Первоначально запуск двигателя осуществляется в асинхронном режиме, то есть, с короткозамкнутым ротором. В этом режиме машина, являющаяся по сути асинхронной, разгоняется до скорости, приближающейся к синхронной. Затем на обмотку индуктора подается постоянный ток (перед этим обмотка, естественно, размыкается) и осуществляется так называемый «вход в синхронизм».
Область применения
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.
Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.
При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.
Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
То есть, генератор реактивной мощности, который способен обеспечивать потребность реактивной мощности узла потребления, к которому он подключен.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.
Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Источник
Особенности, устройство и принцип работы синхронного двигателя простым языком
Электродвигатели прочно закрепились в качестве важнейших составляющих большинства приборов, ежедневно используемых человеком. Одним из видов электрических машин для вращения рабочего органа является синхронный электродвигатель. Особенности устройства и принцип работы синхронного двигателя, мы рассмотрим далее.
Устройство
Конструктивно любой синхронный агрегат представляет собой статор и ротор, объединенные в одном корпусе. Статорная обмотка наматывается в пазы неподвижного магнитопровода, собранного из ферромагнитного материала. Конструкция ротора может включать в себя обмотку, смонтированную на железном каркасе, или постоянный магнит, установленный на валу. Задача и одного, и второго – создать магнитный поток, взаимодействующий с электромагнитным полем статора.
Задача и одного, и второго – создать магнитный поток, взаимодействующий с электромагнитным полем статора.
Принцип работы
На основании п.53 ГОСТ 27471-87 понятие синхронного двигателя подразумевает бесконтактную машину, работающую на переменном токе. У которой в установившемся режиме отношение частоты вращения ротора к частоте тока в обмотках якоря не зависит от величины нагрузки при номинальной работе.
С практической стороны это выглядит следующим образом:
- на обмотки статора, также называемого якорем, подается трехфазное напряжение;
- по мере нарастания амплитуды синусоиды в одной фазе, будет пропорционально увеличиваться ток и электромагнитное поле, создаваемое вокруг обмотки;
- в виду того, что синусоида нарастает во всех трех фазах двигателя поочередно, пик максимального электромагнитного поля будет смещаться от одной обмотки к другой по часовой стрелке;
- магнитное поле ротора (индуктора) поочередно притягивается собственными полюсами к противоположному по знаку вектору поля статора.

В результате такого взаимодействия возникает поступательное вращение вала синхронного двигателя вокруг своей оси. Так как в индукторе постоянно присутствуют сформированные независимым источником силовые линии, частота его вращения полностью соответствует частоте напряжения, подаваемого в обмотки якоря. Возникает синхронизм в двигателе.
Типы синхронных двигателей
В целом синхронные двигатели подразделяются на несколько категорий, в зависимости от их конструктивных особенностей.
Так, для получения потока возбуждения используют:
- обмотку на роторе – для обеспечения электромагнитного взаимодействия на обмотку подается питание от стороннего источника;
- магнитный ротор – вспомогательное магнитное поле ротора создается постоянными магнитами, установленными на нем;
- реактивный ротор – форма магнитопровода индуктора выполнена таким образом, что силовые линии якоря преломляются до получения синхронного вращения.

В зависимости от конструкции ротора, выделяют явнополюсный и неявнополюсный синхронный двигатель.
По режиму работы могут использоваться в качестве электродвигателя, генератора или синхронного компенсатора.
Режимы работы
На практике, каждая электрическая машина может применяться в различных режимах работы:
- Режим двигателя – агрегат функционирует по принципу преобразования электрической энергии в механическую. Напряжение подается на выводы якоря и преобразуется во вращательное усилие на роторе.
- Генераторный режим – в этом случае вал двигателя вращается за счет турбины или другого объекта, а с выводов якоря снимается сгенерированное напряжение.
- Синхронный компенсатор – электродвигатель включается в распределительную сеть на холостом ходу. При этом повышается коэффициент мощности системы за счет потребления реактивной мощности.
P.S. Больше других деталей о синхронном двигателе , а также о том чем он отличается от асинхронного двигателя смотрите в видео:
Источник
Принцип работы синхронного двигателя
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.

- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле.
 Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким.
 Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Устройство и принцип действия синхронного двигателя
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение.
В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую.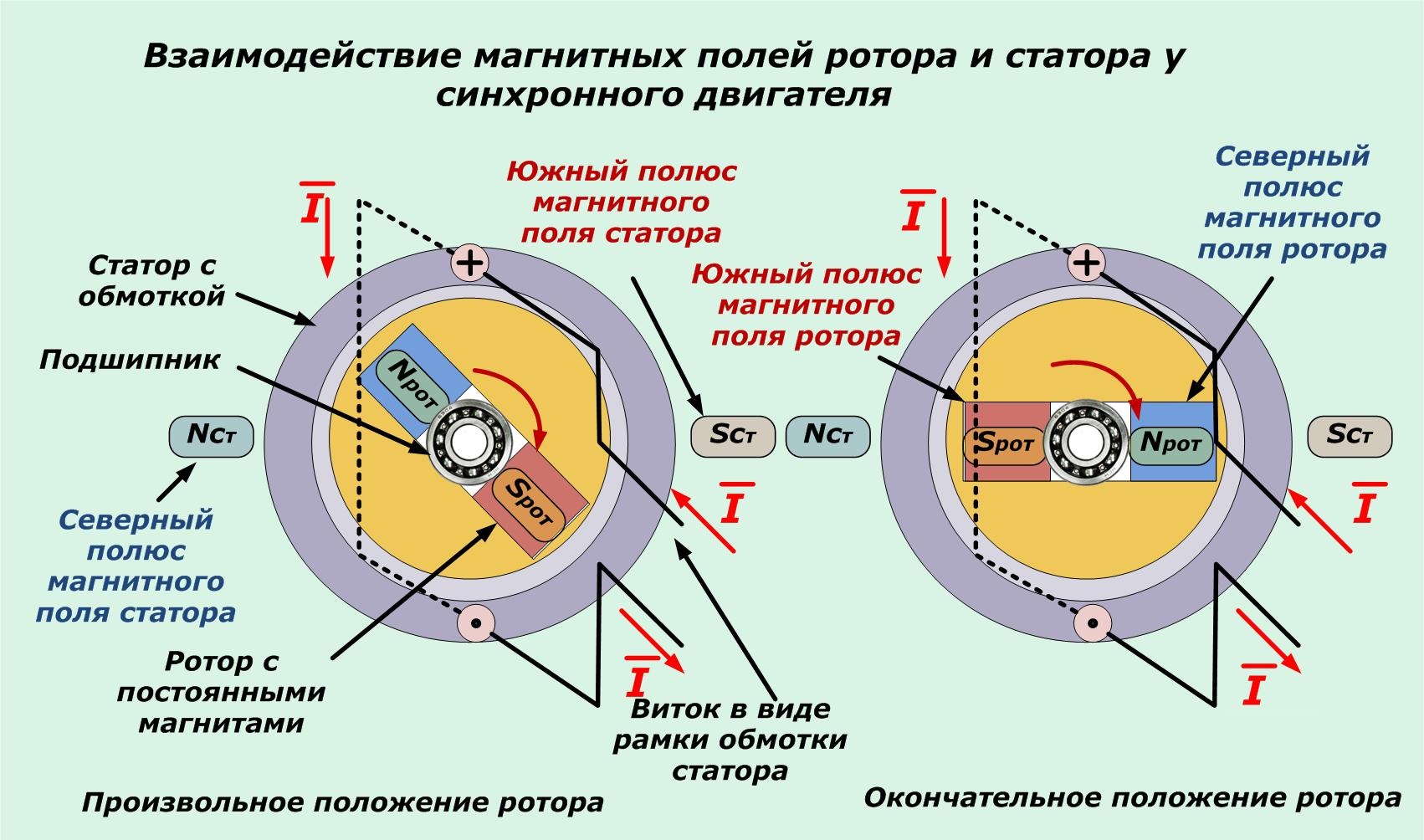 Работает мотор таким образом:
Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
Источник
Типы однофазных синхронных двигателей
Существует два типа однофазных синхронных двигателей, а именно:
- Реактивный двигатель
Реактивный двигатель, как правило, возникает там, где статор создает вращающееся поле в пространстве, а ротор нецилиндрический, так что сопротивление магнитного пути, предлагаемого ротором, вращающееся поле является функцией пространственного угла. Происхождение реактивного момента заключается в тенденции ротора выравниваться в положении минимального сопротивления по отношению к синхронно вращающемуся потоку прямого поля. Двигатель выполнен самозапускающимся по асинхронному принципу за счет наличия в выступающих частях ротора короткозамкнутых медных стержней.
Происхождение реактивного момента заключается в тенденции ротора выравниваться в положении минимального сопротивления по отношению к синхронно вращающемуся потоку прямого поля. Двигатель выполнен самозапускающимся по асинхронному принципу за счет наличия в выступающих частях ротора короткозамкнутых медных стержней.
В однофазном реактивном двигателе вращающееся поле может быть создано любым из рассмотренных выше методов расщепления фаз. Явнополюсная структура придается ротору путем удаления некоторых зубьев ротора асинхронного двигателя, как показано на рис. 10.20 (а). Остальные зубья несут короткозамкнутые медные стержни, обеспечивающие пусковой индукционный момент. После запуска ротор достигает скорости, близкой к синхронной, за счет индукционного действия и приводится в синхронизм во время положительного полупериода синусоидально изменяющегося синхронного момента. Это было бы возможно только в том случае, если ротор имеет низкую инерцию и условия нагрузки легкие. Характеристика скорости вращения типичного реактивного двигателя с асинхронным пуском приведена на рис.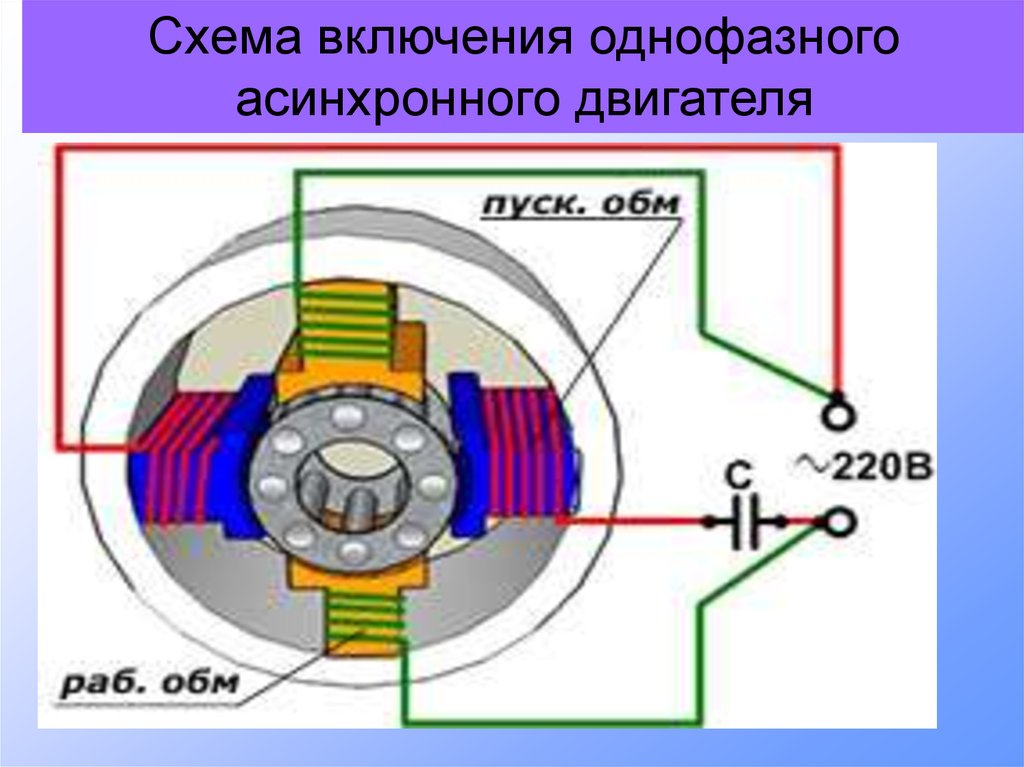 10.20 (б). Как видно из этого рисунка, пусковой момент сильно зависит от положения ротора из-за выступающей природы ротора. Это явление известно как зубчатое соединение . Для удовлетворительной работы синхронного двигателя размер используемого корпуса должен быть намного больше, чем у обычных однофазных асинхронных двигателей. Это объясняет высокое значение пускового момента, показанное на рис. 10.20 (б).
10.20 (б). Как видно из этого рисунка, пусковой момент сильно зависит от положения ротора из-за выступающей природы ротора. Это явление известно как зубчатое соединение . Для удовлетворительной работы синхронного двигателя размер используемого корпуса должен быть намного больше, чем у обычных однофазных асинхронных двигателей. Это объясняет высокое значение пускового момента, показанное на рис. 10.20 (б).
Еще одним типом однофазного синхронного двигателя является двигатель с гистерезисом. Статор гистерезисного двигателя намотан основной и вспомогательной обмотками с постоянно подключенным конденсатором для разделения фаз. Конденсатор выбран для создания сбалансированных двухфазных условий. Ротор представляет собой гладкий сплошной цилиндр из твердой стали (имеет высокие потери на гистерезис) и не имеет обмотки (без стержней ротора).
Обе обмотки статора распределены таким образом, чтобы создать вращающееся поле с как можно более близким к синусоидальному пространственному распределению; это необходимо для снижения потерь в железе из-за пространственных гармоник поля.
Явление гистерезиса приводит к тому, что намагниченность ротора отстает от волны МДС, создаваемой статором. Как следствие, поток ротора отстает на угол δ от оси МДС статора. На рис. 10.21(а) показано магнитное состояние двигателя в любой момент. Поскольку угол δ зависит от гистерезиса, он остается постоянным при всех скоростях вращения ротора. Поэтому момент взаимодействия (гистерезисный момент) между полями статора и ротора постоянен на всех скоростях (рис. 10.21 (b)). Под действием гистерезисного момента ротор плавно разгоняется и, наконец, работает на синхронной скорости с углом δ, подстраивающимся под момент нагрузки. Это контрастирует с явлением «втягивания» в реактивном двигателе, когда он синхронизируется. Постоянство момента гистерезиса демонстрируется выводом ниже.
Потери на гистерезис выражаются как
, где
- B = максимальная плотность потока,
- f 2 = sf = частота ротора
Одновременно в двигателе создается другая составляющая крутящего момента, вызванная потерями на вихревые токи.
Согласно уравнению. (10.27), вихретоковый момент максимален при пуске и линейно уменьшается с исчезновением скольжения при синхронной скорости. Эта составляющая крутящего момента способствует гистерезисному крутящему моменту при пуске, обеспечивая отличные пусковые характеристики гистерезисного двигателя.
Гистерезисный двигатель имеет низкий коэффициент шума по сравнению с однофазным асинхронным двигателем, поэтому нагрузка работает с постоянной скоростью. Это связано с тем, что он работает на одной скорости (синхронно) и почти сбалансированные двухфазные условия не нарушаются (как это было бы в асинхронном двигателе, когда скольжение изменяется с нагрузкой). Кроме того, гладкий (без прорезей) ротор значительно способствует снижению уровня шума этого двигателя. Многоскоростная работа легко возможна путем организации смены полюсов обмоток статора; разматывающийся ротор создает такое же количество полюсов, как и статор. Как уже отмечалось, двигатель имеет отличные пусковые характеристики (пусковой момент равен рабочему моменту). Поэтому он хорошо подходит для ускорения высокоинерционных нагрузок.
Синхронные двигатели против асинхронных двигателей
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать поиск лучшего варианта.
Первым шагом в поиске любого двигателя является определение его источника питания; он питается от переменного тока или постоянного? Это разделит варианты на две широкие категории: двигатели переменного тока и двигатели постоянного тока, а также исключит любые двигатели, которые не будут работать с вашим источником питания. Тем не менее, обе эти категории по-прежнему содержат множество типов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (наша статья о бесщеточных и щеточных двигателях постоянного тока посвящена широким типам двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные двигатели и асинхронные двигатели, и в этой статье будет дано краткое объяснение обоих, а также сравнение их рабочих характеристик и областей применения.
Асинхронные двигатели
Асинхронные двигатели считаются одними из, если не самыми распространенными двигателями переменного тока, используемыми сегодня в промышленности. Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени для оптимизации для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции, создавая механическое вращение. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, не стесняйтесь читать наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше. Однако, вообще говоря, цель асинхронных двигателей состоит в том, чтобы пропускать переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться.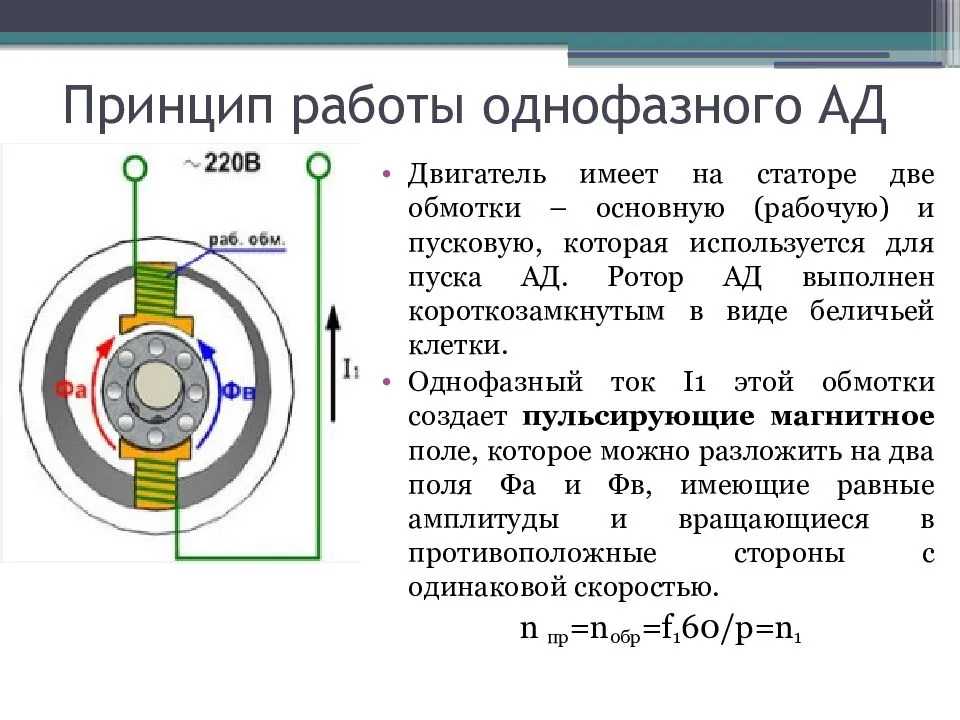 Затем это вращающееся магнитное поле (RMF) индуцирует противоположные магнитные поля в роторе — свободно движущемся якоре, прикрепленном к выходному валу, — и вызывает полезное вращение.
Затем это вращающееся магнитное поле (RMF) индуцирует противоположные магнитные поля в роторе — свободно движущемся якоре, прикрепленном к выходному валу, — и вызывает полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует числу оборотов выходного вала. Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догоняющего» с RMF. Существование скольжения означает, что точная синхронизация с асинхронными двигателями затруднена. Как было сказано ранее, эти двигатели можно найти в бытовой технике, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они имеют сотни скоростей, крутящих моментов, напряжений, размеров и форм. Подробнее об этих машинах читайте в нашей статье все об асинхронных двигателях.
Синхронные двигатели
Синхронные двигатели включают в себя то, чего не могут сделать асинхронные двигатели, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и многое другое. Они достигают этого, связывая магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора будет вращать ротор с точной синхронной скоростью. Есть много способов блокировки этих полюсов, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приведены конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции по своей сути не должны питаться от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и многое другое. Они достигают этого, связывая магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора будет вращать ротор с точной синхронной скоростью. Есть много способов блокировки этих полюсов, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приведены конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции по своей сути не должны питаться от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели по своей природе не являются самозапускающимися, то есть этим двигателям часто требуются пускатели для возбуждения их роторов до полной скорости. Эти пускатели не часто применяются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без начального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы разработчики могли регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, как правило, более дорогие, чем асинхронные двигатели, имеют более высокий КПД (>90%) и являются отличным выбором для дробилок, мельниц, дробилок и других низкоскоростных мощных приложений.
Эти пускатели не часто применяются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без начального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы разработчики могли регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, как правило, более дорогие, чем асинхронные двигатели, имеют более высокий КПД (>90%) и являются отличным выбором для дробилок, мельниц, дробилок и других низкоскоростных мощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока все еще довольно широко распространены, в этой статье будет дано общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в Таблице 1, показано качественное сравнение некоторых общих характеристик асинхронных и синхронных двигателей, а также визуализированы преимущества и недостатки каждой конструкции двигателя переменного тока.
Ниже, в Таблице 1, показано качественное сравнение некоторых общих характеристик асинхронных и синхронных двигателей, а также визуализированы преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных и синхронных двигателей.
Характеристики | Асинхронные двигатели | Синхронные двигатели |
Сложность | Простой дизайн | Комплекс |
Самозапуск | Обычно да | Обычно нет |
Плотность мощности | Средний | Высокий |
Эффективность | Средний | Высокий |
Регулятор мощности | Нет (всегда отстает) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокий |
Сложность (или ее отсутствие) асинхронных двигателей является их лучшим преимуществом перед синхронными конструкциями. Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных двигателей. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготовить/ремонтировать, а также требует покупки и установки дополнительных цепей, чтобы эти двигатели могли работать эффективно.
Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных двигателей. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготовить/ремонтировать, а также требует покупки и установки дополнительных цепей, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно запускаются самостоятельно, а синхронные двигатели — нет. Это означает, что для эффективной работы асинхронных двигателей требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Удельная мощность — это количество энергии (обычно измеряемой в лошадиных силах, л.с. или киловатт-кВт), вырабатываемой на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя вместо асинхронного двигателя.
Синхронные двигатели в некоторых случаях могут достигать КПД >90% и, как правило, более энергоэффективны, чем асинхронные двигатели. КПД зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает меньше потерь энергии при преобразовании электрической энергии в механическую.
Коэффициент мощности представляет собой отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с ней потери. Например: Фабрика должна работать на 1000 кВт (рабочая мощность), а электрический счетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая имеет единицы киловольт-ампер, или кВА, и составляет используется для передачи энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этой фабрики составляет 1000/1250 = 0,8 или 80 %, что означает, что только 80 % тока, подаваемого на фабрику, совершает полезную работу, а 20 % теряется из-за нагрева и других неэффективных действий. Инженеры могут помочь компенсировать эти потери, используя синхронные двигатели, чтобы «опережать» коэффициент мощности или генерировать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дается входное вращение). Часто синхронные двигатели работают в паре с асинхронными двигателями для компенсации индуктивных потерь мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Инженеры могут помочь компенсировать эти потери, используя синхронные двигатели, чтобы «опережать» коэффициент мощности или генерировать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дается входное вращение). Часто синхронные двигатели работают в паре с асинхронными двигателями для компенсации индуктивных потерь мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По ранее объясненным причинам синхронные двигатели дороже в производстве, реализации, обслуживании и ремонте, чем асинхронные двигатели. Однако можно сделать вывод, что их возможности энергосбережения и коррекции коэффициента мощности могут компенсировать их более высокие первоначальные затраты. Верно ли это или нет, в конечном итоге зависит от конкретных приложений, но это следует учитывать, поскольку общая стоимость жизненного цикла всегда должна быть минимизирована в любом проекте.