
Регулирование скорости вращения коллекторного двигателя постоянного тока
Двигатели постоянного тока и мотор-редукторы, созданные на их основе, нуждаются в надежной системе управления скоростью вращения вала. Простым и удобным методом решения проблемы является применение широтно-импульсной модуляции (ШИМ). Способ основан на преобразовании постоянного напряжения в импульсное. При этом управление частотой вращения осуществляют путем изменения длительности подающегося импульса.
Например, по такому же принципу используют ШИМ схему в осветительных приборах для регулировки яркости свечения светодиодных ламп. Так как у светодиода небольшое время затухания частота работы устройства регулирования имеет большое значение. Качественные приборы должны полностью исключать мерцание при пониженной яркости свечения.
Управление двигателями постоянного тока методом ШИМ стало возможным благодаря силе инерции. После прекращения подачи напряжения на обмотки вал электродвигателя останавливается не сразу, продолжая движение по инерции. Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Применение устройства управления для двигателя постоянного тока
Этот метод управления двигателем постоянного тока позволяет плавно изменять скорость вращения вала в широких пределах. ШИМ делает возможным изменение параметров работы двигателя в автоматическом режиме в соответствии с установленными данными. Необходимую информацию регулятор оборотов коллекторного двигателя получает от пользователя или специального датчика, который определяет, температуру, скорость вращения или любой другой параметр. Например, в воздушных системах охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления
двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи. Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Оптимальные значения частоты ШИМ сигнала
Частота может варьироваться в широких пределах от нескольких десятков до нескольких сотен герц. Благодаря емкостной нагрузке происходит сглаживание импульсов. В итоге на двигатель подается «постоянное» напряжение средней величины в зависимости от параметров управляющей системы. Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Сложности при ШИМ регулировании скорости двигателя постоянного тока
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.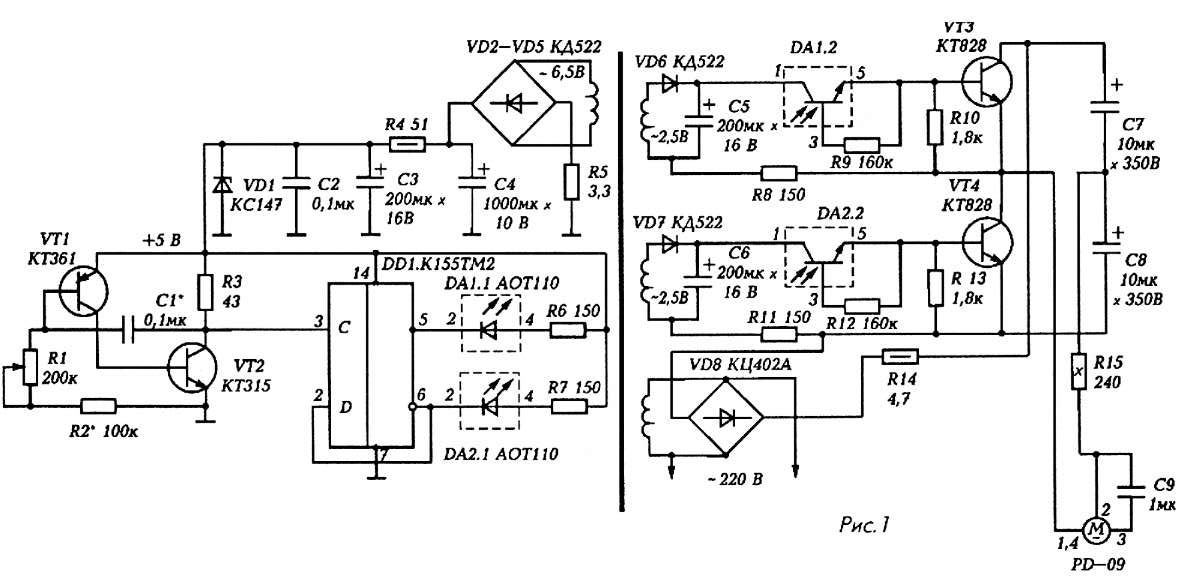
Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса ставим единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
Способы регулирования скорости двигателей постоянного тока независимого возбуждения.

Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования: это соотношениек, при которых работа привода при существующих нагрузках будет устойчивой;
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования.
 Вверх или вниз от скорости, определяемой
естественной характеристикой.
Вверх или вниз от скорости, определяемой
естественной характеристикой.
Запишем уравнение электромеханической характеристики:
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
— введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю .
Рисунок — Схема включения двигателя постоянного тока независимого возбуждения.
Многие производственные механизмы требуют регулирования скорости вращения двигателей. Под регулированием скорости следует понимать принудительное изменение скорости путем воздействия на различные параметры электропривода с целью получения требуемых механических характеристик.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования: это соотношениек, при которых работа привода при существующих нагрузках будет устойчивой;
Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования.
 Оцениваются
капитальные затраты, потери электроэнергии;
Оцениваются
капитальные затраты, потери электроэнергии;Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
Запишем уравнение электромеханической характеристики:
,
из которого следует, что изменять скорость двигателей можно воздействуя на следующие параметры:
— введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к якорю .
Регулирование скорости изменением сопротивления якорной цепи.
Регулирование скорости введениемобеспечивает приснижение скорости двигателя.
Оценим приведенный способ регулирования:
Диапазон регулирования не превышает 3:1, т.
 к. работа при низких скоростях
нестабильна незначительное изменение М Сможет вызвать остановку двигателя. С
уменьшением МСуменьшается
диапазон регулирования;
к. работа при низких скоростях
нестабильна незначительное изменение М Сможет вызвать остановку двигателя. С
уменьшением МСуменьшается
диапазон регулирования;Регулирование ступенчатое;
Регулировать можно только вниз от основной скорости.
II. Регулирование скорости изменением магнитного потока.
Отметим, что изменение Ф возможно лишь в сторону уменьшения, т.е. в режиме, близком к номинальному, магнитная система двигателя насыщена. Уменьшение Ф<ФНприводит к увеличениюи увеличенной просадке скорости.
Т.к. , то при ослаблении поля электрического двигателя, приMC=const,IC.
Оценим заданный способ регулирования:
Диапазон регулирования для большинства двигателей (1,5…2):1
Для двигателя независимого возбуждения можно обеспечить плавное регулирование.

Регулирование экономичное, т.к. капитальные затраты и потер при этом невелики из-за невысокой мощности цепи возбуждения.
Регулирование wвозможно только вверх от основной скорости.
Регулирование скорости изменением подводимого напряжения.
При изменении подводимого напряжения изменяется лишь скорость идеального Х.Х. , поэтому все характеристики расположены параллельно друг другу и параллельно естественной характеристике.
Оценим данный способ регулирования:
Диапазон регулирования (20…30):1
Регулирование скорости плавное
Отличается экономичностью, т.к. энергия торможения возвращается в сеть
Регулирование, как правило, вниз от основной скорости и лишь некоторые двигатели позволяют увеличить UЯвышеUЯН.

Регулирование скорости двигателя постоянного тока
Скорость двигателя постоянного тока уменьшается с увеличением нагрузки на двигатель. Это нежелательно. Следовательно, должна быть меньшая разница в скорости между операциями без нагрузки и полной нагрузкой. На самом деле у каждой движущейся машины есть некоторое падение скорости с увеличением нагрузки. Желательно, чтобы скорость двигателя была постоянной во всем диапазоне скоростей двигателя при приложении к нему переменной нагрузки. Когда двигатель работает без нагрузки, его скорость больше, и скорость падает по мере увеличения нагрузки на двигатель. Разница между скоростью холостого хода и скоростью полной нагрузки называется регулированием скорости двигателя постоянного тока. Разница в скорости относительно скорости при полной нагрузке называется % регулированием скорости двигателя постоянного тока.
Важность регулирования скорости двигателя постоянного тока Различные типы двигателей постоянного тока имеют разное регулирование скорости.![]() Лучшая регулировка скорости – это потребность процесса. Если двигатель поддерживает почти постоянную скорость при переменной нагрузке, он имеет хорошую регулировку скорости. Для лучшего контроля процесса и достижения лучшего качества продукции мы используем двигатель с хорошей регулировкой скорости. Регулирование скорости двигателя также является важным критерием выбора двигателя для конкретного применения.
Лучшая регулировка скорости – это потребность процесса. Если двигатель поддерживает почти постоянную скорость при переменной нагрузке, он имеет хорошую регулировку скорости. Для лучшего контроля процесса и достижения лучшего качества продукции мы используем двигатель с хорошей регулировкой скорости. Регулирование скорости двигателя также является важным критерием выбора двигателя для конкретного применения.
Двигатель постоянного тока с постоянными магнитами имеет регулировку скорости от 10 до 15 %. Регулировка скорости ниже 10 % считается плохой регулировкой скорости. Комбинированный двигатель постоянного тока имеет диапазон регулирования скорости 25%, а дифференциальный составной двигатель имеет диапазон регулирования скорости 5%.
Прежде чем обсуждать регулирование скорости двигателя, сначала мы обсудим скорость двигателя постоянного тока.
Скорость двигателя постоянного тока Скорость двигателя постоянного тока определяется приведенным ниже уравнением.
Из уравнения (3) видно, что скорость двигателя постоянного тока зависит от следующего.
- Обратная ЭДС двигателя постоянного тока ( E b )
- Поток в двигателе
Если отношение E/Φ в двигателе постоянного тока постоянно от холостого хода до полной нагрузки, регулирование двигателя хорошее.
Определение регулирования скорости двигателя постоянного токаТермин «регулирование скорости» относится к изменению скорости двигателя при изменении приложенной нагрузки на вал двигателя при условии, что все остальные условия остаются неизменными. Изменение скорости двигателя от холостого хода до состояния полной нагрузки выражается в процентах от скорости полной нагрузки.
Формула регулирования скорости двигателя постоянного токаСогласно определению на единицу (о.е.) 0005 Пример регулирования скорости в %
Двигатель постоянного тока номинальные обороты 1500 об/мин. На холостом ходу его скорость составляет 1500 об/мин, а при половинной нагрузке скорость снижается до 1480 об/мин. Что такое % регулирования скорости двигателя постоянного тока.
На холостом ходу его скорость составляет 1500 об/мин, а при половинной нагрузке скорость снижается до 1480 об/мин. Что такое % регулирования скорости двигателя постоянного тока.
% регулирование скорости = (N без нагрузки – Nf полная загрузка )/N полная загрузка X 100
= (1500 – 1480)/1490 X 100
= 20/1490 X 100
%
% регулирование скорости = 1,34 %
Двигатель, который работает с почти постоянной скоростью при всех нагрузках ниже полной номинальной нагрузки, имеет хорошее регулирование скорости. Чем ниже процент регулирования, тем более постоянна скорость двигателя постоянного тока. Поэтому мы предпочитаем более низкое % регулирования скорости двигателя постоянного тока.
Регулировка скорости различных двигателей постоянного тока Шунтирующий двигатель постоянного тока Регулировка скорости параллельного двигателя постоянного тока лучше, чем у всех типов двигателей постоянного тока, за исключением дифференциального составного двигателя постоянного тока. Регулировка скорости шунтирующего двигателя постоянного тока находится в диапазоне 10-15 %.
Регулировка скорости шунтирующего двигателя постоянного тока находится в диапазоне 10-15 %.
- Увеличение нагрузки
- Снижение скорости
- Уменьшение противо-ЭДС ( E b ∝ N)
- Увеличение тока якоря [ I a = (V-E b )/Ra)]
- Увеличение крутящего момента ( T ∝ I a ) 9002 5 Увеличение скорости (Здесь двигатель снова устанавливается предыдущая заданная скорость)
- Регулировка скорости шунтирующего двигателя постоянного тока является наихудшей среди всех типов двигателей постоянного тока.
- % регулирования скорости двигателя больше 40%.
- Двигатель постоянного тока не подходит для поддержания точного управления скоростью.
- Регулировка скорости комбинированного двигателя постоянного тока лучше, чем у последовательного двигателя постоянного тока, и хуже, чем у параллельного двигателя постоянного тока.

- Процентное регулирование скорости комбинированного двигателя постоянного тока находится в диапазоне 25–30 %.
- Регулировка скорости дифференциального комбинированного двигателя постоянного тока является лучшей среди всех типов двигателей постоянного тока.
- Процентная регулировка скорости дифференциального двигателя постоянного тока находится в диапазоне 2–5 %.
Похожие сообщения о двигателе постоянного тока
- Типы торможения в двигателе постоянного тока
- Что такое блокировка или торможение обратным током двигателя постоянного тока?
- Что такое крутящий момент на валу двигателя постоянного тока? — Определение, формула и решенная задача
- Направление вращения двигателя постоянного тока
- Двигатель постоянного тока или двигатель постоянного тока0006
- Обратная ЭДС и ее значение в двигателе постоянного тока
Похожие сообщения:
Пожалуйста, подпишитесь на нас и поставьте лайк:
Как контролировать скорость двигателя постоянного тока?
Если вы хотите узнать, как управлять скоростью двигателя постоянного тока, то эта запись в блоге для вас! Мы рассмотрим некоторые основы работы двигателей постоянного тока, а затем обсудим различные способы управления их скоростью. К концу вы должны хорошо понимать, как использовать сигналы ШИМ или регуляторы напряжения для замедления или ускорения вашего двигателя постоянного тока. Итак, приступим!
К концу вы должны хорошо понимать, как использовать сигналы ШИМ или регуляторы напряжения для замедления или ускорения вашего двигателя постоянного тока. Итак, приступим!
Что такое двигатель постоянного тока?
Двигатель постоянного тока — бесценный элемент оборудования, использующий электрическую энергию для преобразования ее в механическую энергию. Он работает за счет использования токоведущей катушки для создания магнитного поля в статоре, которое взаимодействует с постоянными магнитами ротора, вызывая вращение.
Скорость двигателя определяется приложенным напряжением и может точно регулироваться путем управления его током. Это делает его идеальным выбором для таких приложений, как робототехника, автоматизация и бытовая техника. Чтобы управлять скоростью двигателя постоянного тока, вам нужен контроллер, который может соответствующим образом регулировать его токи.
Существует два основных типа контроллеров, используемых для двигателей постоянного тока: ШИМ (широтно-импульсная модуляция) и ПИД (пропорционально-интегрально-дифференциальная). ШИМ-контроллеры через равные промежутки времени посылают импульсы на двигатель постоянного тока, который соответствующим образом регулирует свою скорость. ПИД-регуляторы, с другой стороны, используют систему управления с обратной связью, которая постоянно отслеживает и регулирует ток, подаваемый на двигатель, чтобы поддерживать желаемую скорость.
ШИМ-контроллеры через равные промежутки времени посылают импульсы на двигатель постоянного тока, который соответствующим образом регулирует свою скорость. ПИД-регуляторы, с другой стороны, используют систему управления с обратной связью, которая постоянно отслеживает и регулирует ток, подаваемый на двигатель, чтобы поддерживать желаемую скорость.
Независимо от того, какой тип контроллера вы выберете, важно убедиться, что он соответствует требованиям к мощности вашего двигателя постоянного тока. Если у вас недостаточно мощности, он не сможет правильно отрегулировать ток и, следовательно, не сможет обеспечить оптимальную производительность вашего двигателя постоянного тока. Кроме того, убедитесь, что ваш контроллер совместим с любым программным или аппаратным обеспечением, которое вы планируете использовать для управления двигателями. С учетом этих соображений у вас не должно возникнуть проблем с поиском идеального контроллера для вашего двигателя постоянного тока.
Используя контроллер для регулировки тока, подаваемого на двигатель постоянного тока, вы сможете точно контролировать его скорость и, таким образом, добиться оптимальной производительности в любом приложении, для которого он используется. При правильной настройке и обслуживании это может стать бесценным дополнением к любому проекту. [1]
При правильной настройке и обслуживании это может стать бесценным дополнением к любому проекту. [1]
Принцип работы двигателя постоянного тока
В работе двигателей постоянного тока используется процесс электромагнитной индукции. Если через проводник, находящийся в магнитном поле, протекает электрический ток, проводник будет испытывать силу притяжения или отталкивания, заставляющую его двигаться. Это известно как Закон силы Лоренца и применяется к любому проводнику с током, движущемуся через магнитное поле. В двигателях постоянного тока этот эффект используется для вращения якоря (катушки провода) в поле постоянного магнита двигателя. Величина крутящего момента, создаваемого двигателем, зависит как от силы поля постоянного магнита, так и от тока, протекающего через якорь. Изменяя один или оба, можно контролировать скорость вращения двигателя.
Почему важно управлять скоростью двигателя постоянного тока?
Управление скоростью двигателя постоянного тока важно по ряду причин. В промышленных приложениях, таких как производство и производственные процессы, он позволяет точно контролировать оборудование и его производительность. Этот тип точности может быть чрезвычайно полезен при работе с хрупкими материалами или компонентами, которые требуют определенных скоростей для правильной работы.
В промышленных приложениях, таких как производство и производственные процессы, он позволяет точно контролировать оборудование и его производительность. Этот тип точности может быть чрезвычайно полезен при работе с хрупкими материалами или компонентами, которые требуют определенных скоростей для правильной работы.
Кроме того, управление скоростью двигателей постоянного тока также помогает повысить эффективность за счет снижения затрат на электроэнергию за счет сокращения времени работы на холостом ходу. Кроме того, при включении в робототехнику или другие автоматизированные системы возможность управления скоростью двигателя может обеспечить более точные движения и более плавную работу в целом.
Наконец, регулирование скорости двигателей постоянного тока может обеспечить большую стабильность системы в целом, а также увеличить срок ее службы за счет устранения ненужной нагрузки на ее компоненты. [2]
Несколько методов управления скоростью двигателя постоянного тока
Метод управления потоком
Этот метод управления скоростью двигателя постоянного тока использует сопротивление цепи якоря для изменения потока, создаваемого обмоткой возбуждения. Это делается путем управления величиной тока, протекающего через обмотку возбуждения. В этом методе напряжение якоря остается постоянным, и только часть его проходит через обмотку якоря из-за переменного сопротивления последовательно с ней. В результате через якорь будет протекать больший или меньший ток, и, таким образом, будет создаваться больший или меньший поток в зависимости от того, какая скорость двигателя может точно регулироваться.
Это делается путем управления величиной тока, протекающего через обмотку возбуждения. В этом методе напряжение якоря остается постоянным, и только часть его проходит через обмотку якоря из-за переменного сопротивления последовательно с ней. В результате через якорь будет протекать больший или меньший ток, и, таким образом, будет создаваться больший или меньший поток в зависимости от того, какая скорость двигателя может точно регулироваться.
Метод контроля напряжения
В этом методе управление скоростью двигателя постоянного тока достигается за счет изменения приложенного напряжения на его клеммах. При увеличении напряжения питания выше своего нормального значения крутящий момент, развиваемый двигателем, также увеличивается вместе со скоростью. В результате его скорость будет увеличиваться до тех пор, пока он не достигнет скорости холостого хода, и дальнейшее увеличение напряжения питания не повлияет на его скорость.
Метод управления якорем
Метод управления якорем используется, когда требуется большой крутящий момент наряду с точным контролем скорости двигателя. Этот метод заключается в изменении тока, протекающего в обмотке якоря, путем использования последовательно или параллельно с ней переменного сопротивления. Чем больше ток протекает через обмотку якоря, тем больший крутящий момент может быть создан на более высоких скоростях. Точно так же уменьшение тока якоря приводит к снижению крутящего момента и скорости вращения. [3]
Этот метод заключается в изменении тока, протекающего в обмотке якоря, путем использования последовательно или параллельно с ней переменного сопротивления. Чем больше ток протекает через обмотку якоря, тем больший крутящий момент может быть создан на более высоких скоростях. Точно так же уменьшение тока якоря приводит к снижению крутящего момента и скорости вращения. [3]
Метод управления полем
Этот метод управления скоростью двигателя постоянного тока также известен как метод ослабления поля, при котором поток поля ослабляется за счет уменьшения тока возбуждения. Это приводит к более низкому крутящему моменту на более высоких скоростях, что идеально подходит для высокоскоростных приложений, таких как электрические дрели и т. д. Кроме того, этот метод имеет преимущество в увеличенном диапазоне регулирования по сравнению с другими методами, поскольку он может работать от нулевой скорости до Номинальная скорость.
Метод управления обратной связью тахогенератора
Это усовершенствованный метод управления скоростью двигателя постоянного тока, который использует обратную связь тахогенератора для точного и точного управления его выходной скоростью. В этом методе фактическая скорость двигателя измеряется бесконтактным способом с помощью тахогенератора, а затем эта информация передается обратно в схему усилителя, которая сравнивает ее с эталонным входным сигналом и соответствующим образом регулирует свое усиление, чтобы можно было достичь желаемого выходного напряжения. Обеспечивает точное управление скоростью двигателя и используется в приложениях, требующих высокой точности.
В этом методе фактическая скорость двигателя измеряется бесконтактным способом с помощью тахогенератора, а затем эта информация передается обратно в схему усилителя, которая сравнивает ее с эталонным входным сигналом и соответствующим образом регулирует свое усиление, чтобы можно было достичь желаемого выходного напряжения. Обеспечивает точное управление скоростью двигателя и используется в приложениях, требующих высокой точности.
Каждый из этих методов имеет свои преимущества и недостатки в зависимости от применения, в котором они используются. Следовательно, необходимо выбрать соответствующую технику, которая может обеспечить максимальную эффективность наряду с желаемыми результатами. Кроме того, при работе с двигателями постоянного тока необходимо соблюдать меры предосторожности, чтобы избежать несчастных случаев или травм. [4]
Регулятор скорости двигателя постоянного тока в последовательных типах
Использование двигателей постоянного тока серийного типа обеспечивает наилучшие возможности управления и энергоэффективности по сравнению с двигателями других типов. В двигателях постоянного тока последовательного типа якорь соединен последовательно с обмоткой возбуждения. Такое расположение обеспечивает больший крутящий момент и лучшую регулировку скорости на всех скоростях. Скорость двигателя можно изменять, изменяя напряжение питания или изменяя сопротивление одной или обеих обмоток.
В двигателях постоянного тока последовательного типа якорь соединен последовательно с обмоткой возбуждения. Такое расположение обеспечивает больший крутящий момент и лучшую регулировку скорости на всех скоростях. Скорость двигателя можно изменять, изменяя напряжение питания или изменяя сопротивление одной или обеих обмоток.
При работе в последовательной цепи любое изменение тока приведет к одинаково пропорциональному изменению крутящего момента и скорости. Увеличивая или уменьшая сопротивление, введенное в одну или обе обмотки, постепенно или резко, это приведет к уменьшению скорости при увеличении сопротивления и увеличению скорости при уменьшении сопротивления. Например, если вы хотите замедлить двигатель, вы можете ввести резистор в одну из обмоток. Это уменьшит протекающий ток и уменьшит напряженность магнитного поля, что приведет к замедлению ротора.
Помимо управления сопротивлением, другим способом изменения скорости двигателей постоянного тока последовательного типа является регулирование напряжения. Изменяя напряжение питания, вы можете увеличить или уменьшить ток в обеих обмотках, что приведет к пропорциональному изменению крутящего момента и скорости. Например, если вы хотите увеличить скорость, то увеличение приложенного напряжения сделает именно это из-за увеличения тока, протекающего в обеих обмотках.
Изменяя напряжение питания, вы можете увеличить или уменьшить ток в обеих обмотках, что приведет к пропорциональному изменению крутящего момента и скорости. Например, если вы хотите увеличить скорость, то увеличение приложенного напряжения сделает именно это из-за увеличения тока, протекающего в обеих обмотках.
Поскольку изменение сопротивления или напряжения обеспечивает надежные методы управления скоростью двигателей постоянного тока, работающих последовательно, важно понимать, как эти изменения влияют на работу вашего двигателя. Знание того, как и когда регулировать сопротивление или напряжение, является ключом к получению желаемой скорости для вашего двигателя постоянного тока.
Управление шунтирующим якорем
Якорь двигателя постоянного тока представляет собой вращающуюся часть, состоящую из обмоток и сегментов коллектора.
Ток, протекающий через обмотки якоря, создает магнитное поле, которое взаимодействует с магнитами возбуждения, создавая крутящий момент. Напряжение якоря равно сумме противо-ЭДС и падения напряжения на сопротивлении якоря. Эта связь представлена законом Ома:
Напряжение якоря равно сумме противо-ЭДС и падения напряжения на сопротивлении якоря. Эта связь представлена законом Ома:
V = E + IR
Как залудить жало паяльника?
где V — напряжение якоря, E — противо-ЭДС, I — ток якоря, R — сопротивление якоря.
Если резистор соединен последовательно с якорем, он называется двигателем с параллельной обмоткой или параллельным двигателем. Двигатели с параллельным возбуждением являются наиболее распространенным типом двигателей постоянного тока, используемых для регулирования скорости. Сопротивление шунта можно регулировать для изменения тока якоря и, следовательно, скорости двигателя.
При использовании двигателя с параллельной обмоткой для регулирования скорости важно, чтобы его рабочее напряжение оставалось постоянным, поскольку любое изменение напряжения вызовет соответствующее изменение противо-ЭДС, влияющее на скорость. Таким образом, с двигателем с параллельной обмоткой следует использовать регулируемый источник питания или регулятор, чтобы всегда обеспечивать требуемый уровень напряжения. Это позволит двигателю работать с постоянной скоростью, несмотря на изменения нагрузки или системные помехи. Кроме того, необходимо обеспечить хорошую вентиляцию и отвод тепла, чтобы предотвратить перегрев двигателя.
Это позволит двигателю работать с постоянной скоростью, несмотря на изменения нагрузки или системные помехи. Кроме того, необходимо обеспечить хорошую вентиляцию и отвод тепла, чтобы предотвратить перегрев двигателя.
Регулируя сопротивление шунта, можно точно контролировать скорость двигателя постоянного тока. Однако этот метод не обеспечивает наилучшей эффективности и может привести к потерям мощности из-за тепла, выделяемого шунтирующим резистором. Таким образом, этот подход следует использовать только тогда, когда требуется точное управление скоростью без учета экономии энергии. [5]
Техника полевого дивертора
Техника полевого дивертора — методология управления, используемая для изменения скорости двигателей постоянного тока. Этот метод работает путем управления током в обмотках возбуждения двигателя, который управляет как его крутящим моментом, так и скоростью. Регулируя ток в этих обмотках возбуждения, противо-ЭДС можно смещать вверх или вниз, вызывая увеличение или уменьшение скорости двигателя.
Технология полевого дивертера обеспечивает точное и точное управление скоростью двигателя при минимальном потреблении энергии. Кроме того, этот метод обеспечивает плавное и эффективное ускорение и торможение двигателя. В некоторых случаях его также можно комбинировать с другими методами, такими как 9.0005 широтно-импульсная модуляция (ШИМ) для оптимальной производительности. Благодаря своей эффективности и низкой стоимости метод полевого дивертера стал популярным выбором для управления скоростью двигателя постоянного тока в различных приложениях.
Чтобы использовать технику полевого дивертора, необходимо сначала установить полевые диверторы, которые представляют собой компоненты, регулирующие протекание тока через обмотки возбуждения двигателя. После установки внешний источник питания можно использовать для регулировки скорости двигателя путем изменения величины тока, проходящего через переключатели возбуждения. Важно отметить, что этот метод можно использовать как с последовательными, так и с параллельными двигателями, но могут потребоваться дополнительные шаги в зависимости от используемого типа.
В целом, метод полевого отвода обеспечивает эффективный способ управления скоростью двигателя постоянного тока при сохранении точности и эффективности. Простота установки и экономичность делают его идеальным для многих применений. Кроме того, комбинируя его с другими методами управления, такими как ШИМ, можно оптимизировать производительность и достичь желаемой скорости двигателя.
Управление регулируемым полем
Двигатель постоянного тока работает путем изменения тока возбуждения или напряжения якоря при сохранении постоянной скорости. Этот тип двигателя имеет дополнительное преимущество, заключающееся в том, что он имеет регулируемую скорость, и может использоваться в приложениях, требующих регулирования переменной скорости.
Для изменения отводимого тока возбуждения используется транзисторная схема усилителя постоянного тока (TDC), состоящая из транзисторов, резисторов, конденсаторов и диодов. Усилитель TDC преобразует слабый входной сигнал в большой выходной сигнал, который подается на обмотку возбуждения с ответвлениями для управления ее током. Сопротивление, включенное последовательно с ответвленной обмоткой возбуждения, ограничивает ток до безопасного значения, а также обеспечивает высокий пусковой момент на низких скоростях. Потенциометр, подключенный к источнику постоянного тока, позволяет регулировать максимальный ток ответвления. Простой метод управления скоростью заключается в изменении приложенного напряжения к якорю с помощью реостата или SCR (кремниевого выпрямителя). Электронный регулятор, называемый прерывателем, также можно использовать для изменения напряжения на якоре.
Сопротивление, включенное последовательно с ответвленной обмоткой возбуждения, ограничивает ток до безопасного значения, а также обеспечивает высокий пусковой момент на низких скоростях. Потенциометр, подключенный к источнику постоянного тока, позволяет регулировать максимальный ток ответвления. Простой метод управления скоростью заключается в изменении приложенного напряжения к якорю с помощью реостата или SCR (кремниевого выпрямителя). Электронный регулятор, называемый прерывателем, также можно использовать для изменения напряжения на якоре.
Метод управления сопротивлением якоря шунтирующего двигателя постоянного тока
Метод управления сопротивлением якоря для управления скоростью шунтирующего двигателя постоянного тока является одним из наиболее распространенных и простых методов, используемых для регулировки скорости двигателя. Добавив сопротивление последовательно с цепью якоря, можно уменьшить ток через него, что приведет к замедлению двигателя. Этот метод особенно полезен для маломощных двигателей, поскольку он не требует внешнего источника питания и не влияет на другие параметры, такие как КПД или коэффициент мощности.
Этот метод особенно полезен для маломощных двигателей, поскольку он не требует внешнего источника питания и не влияет на другие параметры, такие как КПД или коэффициент мощности.
Недостатком этого метода является то, что он неэффективен, так как часть энергии теряется в резисторах из-за рассеивания тепла. Кроме того, добавление слишком большого сопротивления может привести к чрезмерному нагреву, что в конечном итоге приведет к повреждению изоляции обмотки двигателя. По этой причине управление сопротивлением якоря следует использовать осторожно и только для кратковременной регулировки скорости.
Другим ограничением метода управления сопротивлением якоря является то, что его нельзя использовать для снижения скорости двигателя ниже его базовой скорости, поскольку в какой-то момент добавление большего сопротивления не приведет к дальнейшему снижению тока. Таким образом, этот метод следует использовать, когда требуется лишь небольшое увеличение или уменьшение скорости двигателя. В тех случаях, когда требуется более точная и предсказуемая работа, могут быть предпочтительны другие методы, такие как управление магнитным полем или частотно-регулируемые приводы.
В тех случаях, когда требуется более точная и предсказуемая работа, могут быть предпочтительны другие методы, такие как управление магнитным полем или частотно-регулируемые приводы.
Благодаря эффективному и безопасному управлению сопротивлением якоря двигатели постоянного тока можно легко настроить для работы быстрее или медленнее в зависимости от требований приложения. Это делает его отличным выбором для приложений, где требуется точная и экономичная регулировка скорости. [6]
Часто задаваемые вопросы
Каковы методы управления скоростью двигателя постоянного тока?
Скорость двигателя постоянного тока можно контролировать с помощью различных методов, включая использование механических фрикционных тормозов, электронных приводов, методов ШИМ или широтно-импульсной модуляции и различных сопротивлений цепи возбуждения. Каждый метод имеет свои преимущества и недостатки в зависимости от области применения. Механические фрикционные тормоза являются простейшей формой управления скоростью, поскольку они используют физические силы для замедления вращения двигателя. Электронные приводы позволяют точно контролировать скорость, изменяя уровни напряжения, подаваемого на двигатель; это часто используется в роботизированных приложениях. В широтно-импульсной модуляции (ШИМ) также используется напряжение для регулировки скорости с изменением частоты; PWM предпочтительнее для робототехники из-за более быстрого времени отклика по сравнению с другими методами. Наконец, изменение сопротивления цепи возбуждения позволяет более точно регулировать скорость, но с меньшей выходной мощностью. Все эти методы можно использовать для поддержания и регулирования скорости любого двигателя постоянного тока.
Электронные приводы позволяют точно контролировать скорость, изменяя уровни напряжения, подаваемого на двигатель; это часто используется в роботизированных приложениях. В широтно-импульсной модуляции (ШИМ) также используется напряжение для регулировки скорости с изменением частоты; PWM предпочтительнее для робототехники из-за более быстрого времени отклика по сравнению с другими методами. Наконец, изменение сопротивления цепи возбуждения позволяет более точно регулировать скорость, но с меньшей выходной мощностью. Все эти методы можно использовать для поддержания и регулирования скорости любого двигателя постоянного тока.
Можно ли легко контролировать скорость двигателя постоянного тока?
Да, скоростью двигателя постоянного тока можно легко управлять. Существует несколько методов, которые можно использовать для управления скоростью двигателя постоянного тока, например, использование ШИМ-сигнала, изменение приложенного напряжения или тока, а также использование Н-мостовой схемы. Широтно-импульсная модуляция (ШИМ) — это метод, при котором на двигатель постоянного тока с течением времени подается различное количество энергии. Этот метод обычно используется, когда требуется точное управление скоростью двигателя, и он включает в себя включение и выключение электрического сигнала на высокой частоте при изменении рабочих циклов этих сигналов по отношению друг к другу. Это приведет к изменению средней подаваемой мощности, что приведет к соответствующей регулировке скорости вращения. Другой способ отрегулировать скорость двигателей постоянного тока — изменить приложенное напряжение и ток. Обычно это делается с помощью линейного регулирования, которое регулирует подачу питания на двигатель в соответствии с опорным сигналом. Наконец, схема Н-моста может использоваться для управления скоростью, позволяя подавать различное количество напряжения или тока на две клеммы, соединенные с помощью схемы Н-моста. Изменяя направление протекания тока или его величину, можно соответствующим образом регулировать скорость двигателя постоянного тока.
Широтно-импульсная модуляция (ШИМ) — это метод, при котором на двигатель постоянного тока с течением времени подается различное количество энергии. Этот метод обычно используется, когда требуется точное управление скоростью двигателя, и он включает в себя включение и выключение электрического сигнала на высокой частоте при изменении рабочих циклов этих сигналов по отношению друг к другу. Это приведет к изменению средней подаваемой мощности, что приведет к соответствующей регулировке скорости вращения. Другой способ отрегулировать скорость двигателей постоянного тока — изменить приложенное напряжение и ток. Обычно это делается с помощью линейного регулирования, которое регулирует подачу питания на двигатель в соответствии с опорным сигналом. Наконец, схема Н-моста может использоваться для управления скоростью, позволяя подавать различное количество напряжения или тока на две клеммы, соединенные с помощью схемы Н-моста. Изменяя направление протекания тока или его величину, можно соответствующим образом регулировать скорость двигателя постоянного тока.
Как вы контролируете скорость двигателя 24 В постоянного тока?
Скорость двигателя 24 В постоянного тока можно контролировать с помощью различных методов. Наиболее распространенным методом является использование широтно-импульсной модуляции (ШИМ) для регулировки мощности, подаваемой на двигатель. ШИМ работает, изменяя рабочий цикл или количество времени, в течение которого мощность подается на двигатель, чтобы он достиг желаемой скорости. Кроме того, вы также можете использовать переменные резисторы, такие как потенциометры и реостаты, для управления уровнем напряжения, подаваемого на двигатель, тем самым контролируя его скорость. Наконец, вы также можете использовать комбинацию ШИМ и переменных резисторов, чтобы точно настроить желаемую скорость.
Какая скорость вращения двигателя 24 В постоянного тока?
Частота вращения двигателя постоянного тока 24 В обычно составляет от 2000 до 5000 об/мин в зависимости от модели. Кроме того, некоторые двигатели имеют редуктор для увеличения крутящего момента и снижения скорости; эти двигатели могут иметь еще более высокий диапазон до 10 000 об / мин и более.
Важно отметить, что напряжение, подаваемое на двигатель постоянного тока, напрямую связано с его рабочей скоростью; увеличение напряжения приведет к увеличению скорости, а его уменьшение приведет к снижению скорости двигателя. Также важно убедиться, что ваш источник питания для двигателя способен обеспечить достаточный ток для его работы. В противном случае вы можете повредить как двигатель, так и источник питания из-за перегрева или перегрузки.
Как увеличить скорость двигателя постоянного тока 12 В?
Вы можете увеличить скорость вашего 12-вольтового двигателя постоянного тока, увеличив подаваемое на него напряжение. Это можно сделать с помощью повышающего преобразователя, который повысит напряжение с 12 В до 24 В или выше. Кроме того, вы также можете использовать широтно-импульсную модуляцию (ШИМ) для достижения более высоких скоростей без прямого увеличения напряжения. ШИМ работает, быстро включая и выключая питание, тем самым контролируя количество энергии, подаваемой на двигатель, и позволяя более точно контролировать его скорость. Наконец, если у вас есть доступ к трансформатору переменного напряжения, вы также можете использовать его, чтобы точно установить желаемую рабочую скорость.
Наконец, если у вас есть доступ к трансформатору переменного напряжения, вы также можете использовать его, чтобы точно установить желаемую рабочую скорость.
Может ли любой двигатель постоянного тока иметь регулируемую скорость?
Ответ на этот вопрос зависит от типа вашего двигателя постоянного тока. Коллекторным двигателем постоянного тока можно управлять, изменяя приложенное напряжение, однако бесщеточным двигателям требуется регулятор скорости для изменения выходной скорости. Коллекторные двигатели относительно просты и недороги в управлении, в них используются механические компоненты, такие как шестерни или шкивы. Эти методы, как правило, изнашиваются с течением времени, поэтому они могут быть непригодны для непрерывной работы. Бесщеточные двигатели постоянного тока должны использовать электронный регулятор скорости (ESC) для изменения скорости вращения. ESC преобразует электрическую энергию от источника питания в механическую энергию, которая вращает вал двигателя с желаемой скоростью. ESC обычно питается от батареи, но он также может питаться от других источников, таких как солнечные батареи или сеть.
ESC обычно питается от батареи, но он также может питаться от других источников, таких как солнечные батареи или сеть.
Полезное видео: Как сделать простую схему регулятора скорости двигателя постоянного тока
Заключение
Управляя скоростью двигателя постоянного тока, вы можете настроить производительность вашего оборудования для конкретных приложений. Наиболее распространенными способами регулирования скорости двигателя постоянного тока являются изменение его напряжения, изменение тока и изменение числа полюсов в обмотке статора. Вкладывая средства в качественные компоненты и надлежащие методы подключения, вы можете быть уверены, что ваше оборудование будет работать безопасно и эффективно на любой желаемой скорости. При правильном выборе компонентов и некоторых знаниях о том, как управлять скоростью двигателя постоянного тока, каждый может запустить свою машину быстрее, чем когда-либо прежде.
- https://www.elprocus.
