18.8.2 Импульсный регулятор напряжения питания
Импульсное регулирование частоты вращения асинхронных двигателей осуществляют путём периодического включения двигателя в сеть и выключения его из сети. При этом двигатель постоянно находится в переходном режиме ускорения и замедления частоты вращения ротора. В простейшем случае импульсное регулирование можно реализовать с помощью бесконтактного электронного ключа, например, применив фототиристорные оптроны. По энергетическим показателям импульсное регулирование частоты вращения двигателя эквивалентно методу изменения подводимого к обмотке статора напряжения, но проще реализуется.
а – принципиальная схема; б – изменение управляющих импульсов и частоты вращения во времени, ИРН – импульсный регулятор напряжения
Рисунок 18.15 — Импульсное регулирование электропривода с асинхронным двигателем
Диапазон колебаний частоты вращения
при импульсном регулировании за время
одного периода Т составляет от n
Примером реализации импульсного регулятора напряжения для универсального коллекторного двигателя вентилятора служит приведённая ниже схема.
~ 220 В
F N
МП – микропроцессор
Рисунок 18.16 — Принципиальная схема импульсного регулятора УКД вентилятора
лабораторного стенда № 5
В этой схеме двоичный код процессора
преобразуется в прямоугольные импульсы
компаратором, затем формируются пачки
импульсов, которые усиливаются
операционным усилителем и передаются
на светодиод фототранзисторного оптрона
управляющего состоянием электронного
реле, питающего в импульсном режиме
обмотки универсального коллекторного
двигателя.
18.8.3 Регулирование скорости вращения асинхронных двигателей изменением
частоты питающего статорные обмотки напряжения
Здесь будут рассмотрены принцип действия и функциональные особенности только преобразователей частоты переменного тока, которые в настоящее время широко применяются в электроприводе.
18.8.3.1 Краткое описание частотно-регулируемого электропривода
переменного тока
Современный частотно-регулируемый
электропривод состоит из асинхронного
или синхронного электрического двигателя
и преобразователя частоты. Преобразователь
частоты управляет электрическим
двигателем и представляет собой
электронное статическое устройство.
На выходе преобразователя формируется
электрическое напряжение с переменными
амплитудой и частотой.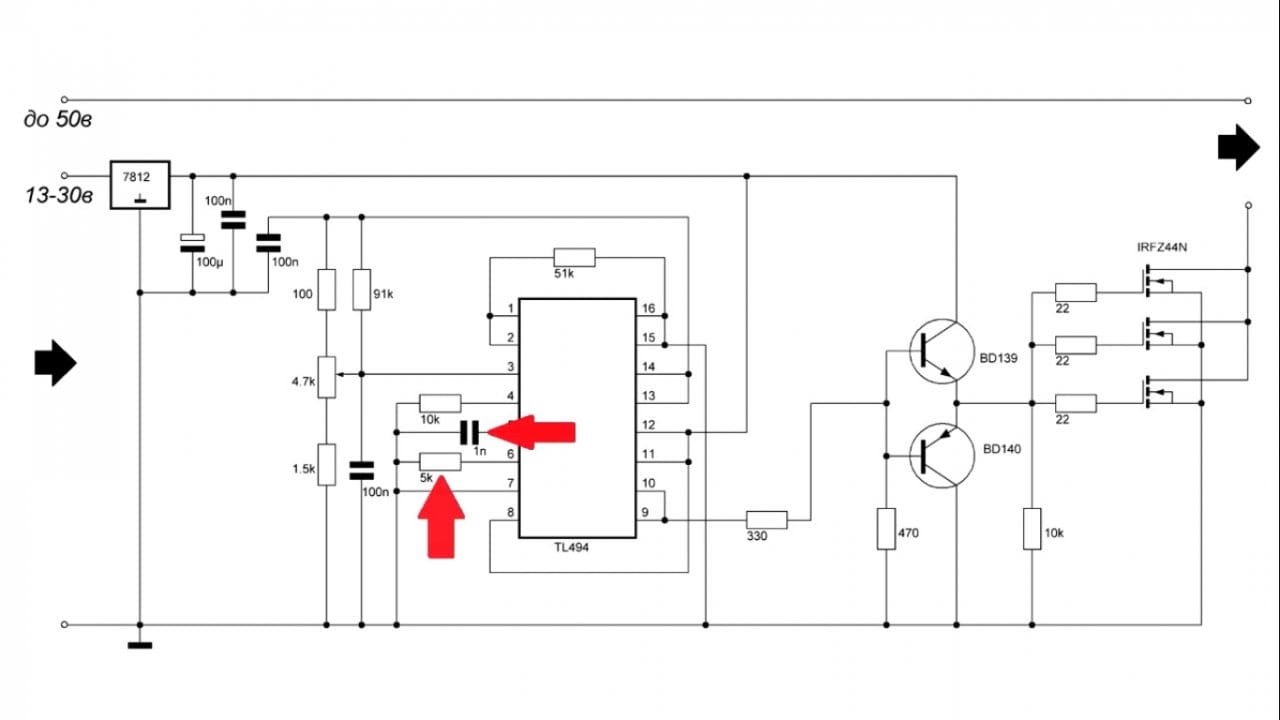 Термин
«частотно-регулируемый электропривод»
обусловлен тем, что регулирование
скорости вращения двигателя осуществляется
изменением частоты напряжения питания,
подаваемого на двигатель от преобразователя
частоты.
Термин
«частотно-регулируемый электропривод»
обусловлен тем, что регулирование
скорости вращения двигателя осуществляется
изменением частоты напряжения питания,
подаваемого на двигатель от преобразователя
частоты.
Разработка преобразователей частоты на биполярных транзисторах с изолированным затвором , MOSFET и BIMOSFET позволила широко применять частотно-регулируемый электропривод для решения различных технологических задач в промышленности. В дальнейшем речь будет идти о трёхфазном частотно-регулируемом электроприводе, как наиболее распространённом.
Методы частотного управления.
В наиболее распространённом частотно-регулируемом электроприводе на основе асинхронных двигателей с короткозамкнутым ротором применяют скалярное и векторное управление.
При скалярном (статическом) управлении
по определённому закону изменяют
амплитуду и частоту приложенного к
двигателю напряжения.
В статических преобразователях частоты чаще всего предусмотрено три основных вида нагрузки на валу двигателя:
а) Поддерживается постоянной перегрузочная способность двигателя, т.е. отношение максимального момента двигателя к текущему моменту нагрузки
;
в этом случае коэффициент мощности и КПД двигателя во всём диапазоне регулирования частоты вращения практически не изменяются.
б) Для постоянного момента нагрузки стабилизируется отношение
;
здесь
при малых частотах вращения, начиная с
некоторого значения частоты, максимальный
момент двигателя начинает уменьшаться.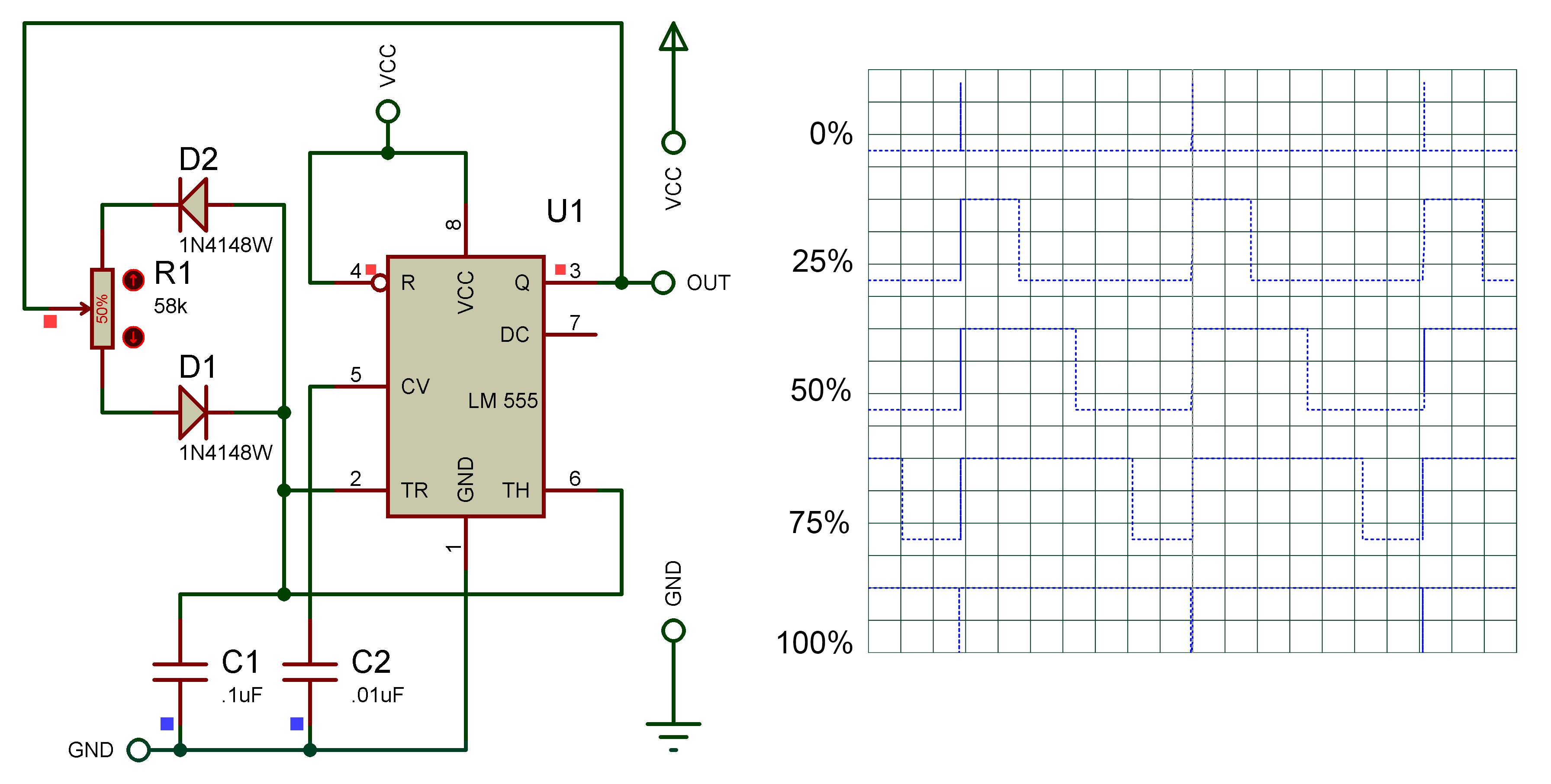 Для компенсации этого явления и увеличения
пускового момента увеличивают амплитуду
напряжения питания.
Для компенсации этого явления и увеличения
пускового момента увеличивают амплитуду
напряжения питания.
в) В случае вентиляторной (насосной) нагрузки реализуют зависимость
.
Скалярное управление применяют для диапазона регулирования частоты 1 : 40, что вполне достаточно для управления технологическими механизмами. Кроме того, этот вид управления можно использовать для одновременного управления группой электродвигателей.
Векторное (фазовое или динамическое) управление
В синхронном частотно-регулируемом
приводе применяют те же методы
управления, что и в асинхронном. Однако
в чистом виде частотное регулирование
синхронных двигателей используют только
при малой мощности двигателя, когда
моменты сопротивления небольшие, а
инерционность приводимого механизма
незначительна. В противном случае
синхронный двигатель выходит из
синхронизма. При большой мощности
электропривода условию сохранения
синхронизма отвечает только привод
вентиляторов и центробежных насосов
(т.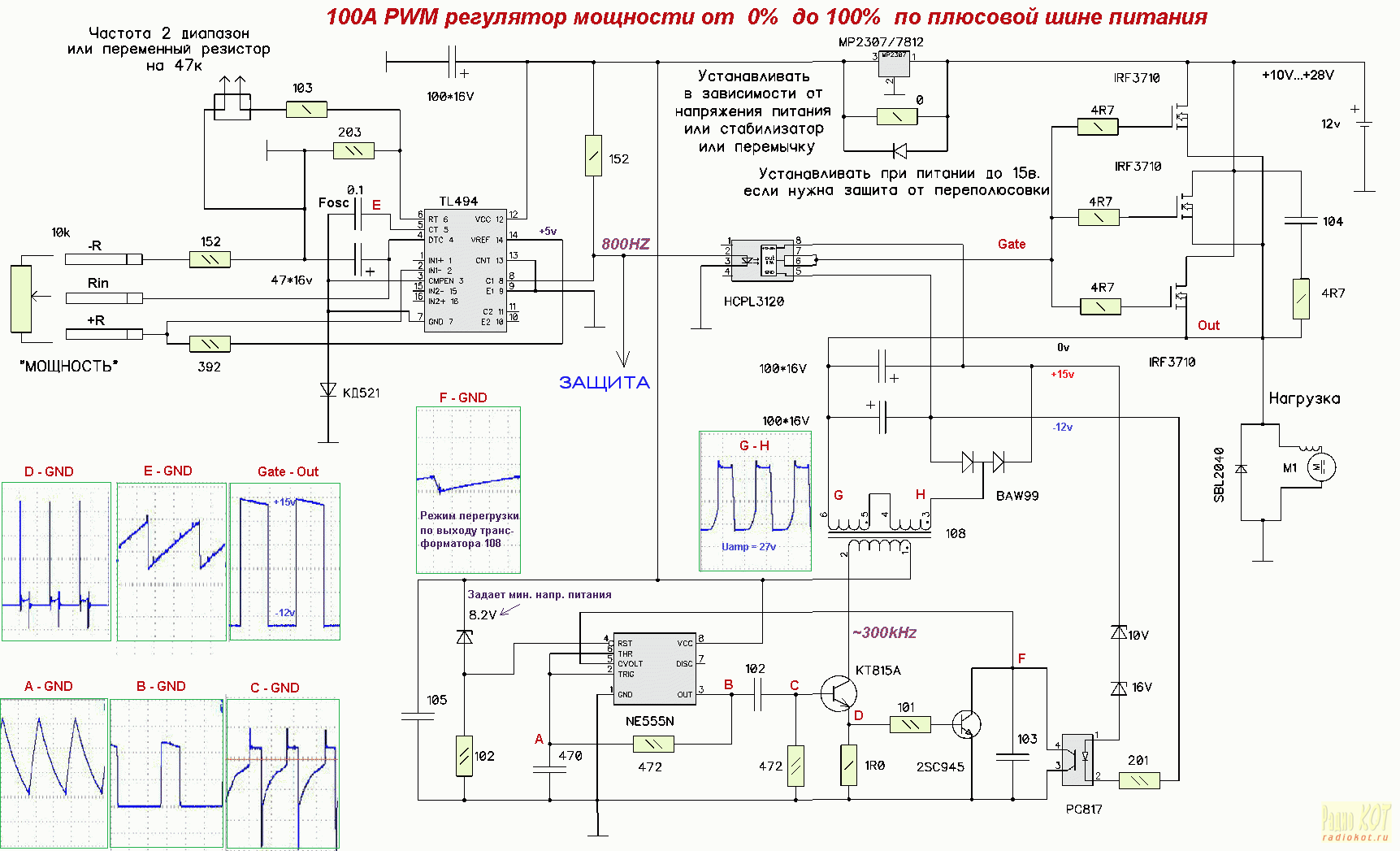 н. «вентиляторная» нагрузка).
н. «вентиляторная» нагрузка).
Для синхронных электроприводов большой мощности используется замкнутая система автоматического регулирования, в которой есть датчик положения ротора двигателя. Управление преобразованием частоты осуществляется в строгом соответствии с положением ротора синхронного двигателя.
Характеристика преобразователей частоты.
Преобразователь частоты – это устройство, которое предназначено для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты. Частота выходного тока преобразователя может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Электрическая схема любого
преобразователя частоты состоит из
силовой части и системы управления.
Силовая часть обычно выполнена на
тиристорах или транзисторах, которые
работают в режиме электронных ключей.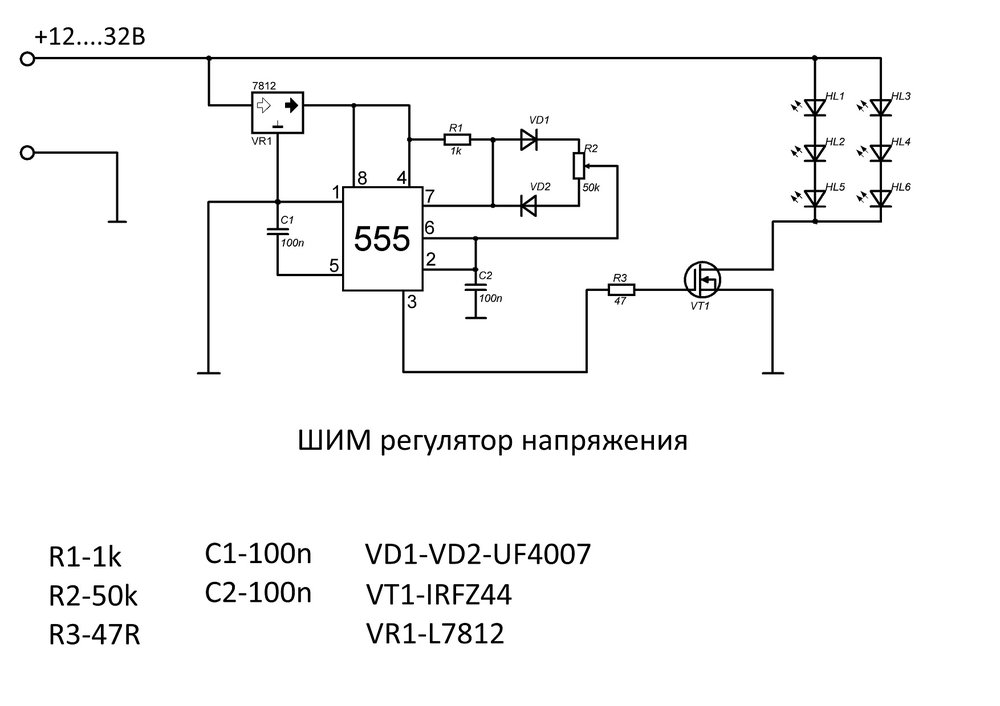 Система управления обеспечивает работу
силовых симисторных или транзисторных
ключей, контроль, диагностику состояния
и защиту элементов электропривода.
Система управления обеспечивает работу
силовых симисторных или транзисторных
ключей, контроль, диагностику состояния
и защиту элементов электропривода.
Преобразователи частоты, которые применяют в электроприводе, в зависимости от структуры и принципа действия силовой части разделяются на две группы:
Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
Исторически
первыми были разработаны преобразователи
частоты с непосредственной связью, в
которых силовая часть представляет
собой управляемый выпрямитель и выполнена
на не запираемых тиристорах. Система
управления поочерёдно отпирает группы
тиристоров, подключая соответствующие
обмотки статора двигателя к питающей
сети. При этом «срезается» часть синусоиды
каждой фазы, а трёхфазное синусоидальное
напряжение вырождается в «пилообразное»
напряжение меньшей частоты, которая не
может быть равна или больше частоты
питающего напряжения.
«Пилообразная» форма переменного тока является источником возникновения колебаний электрического тока более высоких частот, который вызывает дополнительные потери энергии, перегрев двигателя, снижение момента и коэффициента мощности, сильные помехи в питающей сети.
Достоинствами электропривода, имеющего в своём составе преобразователь частоты с непосредственной связью, являются:
Самый высокий практический КПД (98,5 % и выше) среди всех приводов.
Способность работать с большими напряжениями и токами, что определяет возможность их применения в высоковольтных электроприводах.
Относительно низкая стоимость, несмотря на увеличение абсолютной стоимости из-за сложной системы управления и дополнительного оборудования.
Самое широкое применение в современных
частотно-регулируемых электроприводах
находят преобразователи с явно выраженным
звеном постоянного тока.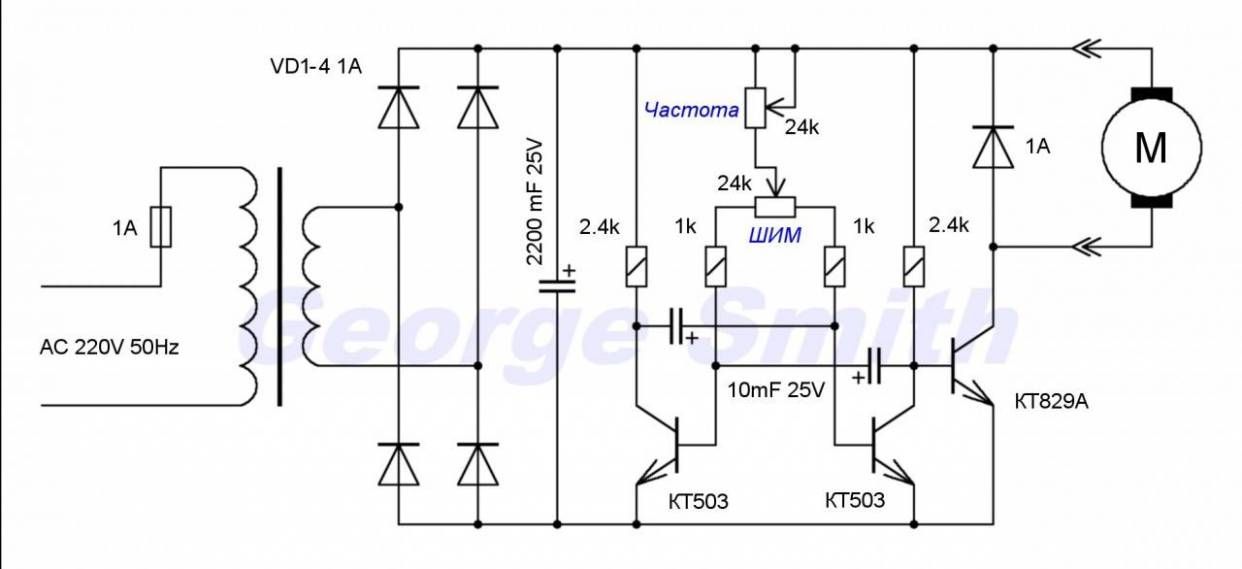 В этих
преобразователях применяют двойное
преобразование электрической энергии:
входное синусоидальное напряжение с
постоянной амплитудой и частотой
выпрямляется в управляемом выпрямителе,
фильтруется, сглаживается и затем вновь
преобразуется инвертором в переменное
напряжение изменяемой частоты и
амплитуды.
В этих
преобразователях применяют двойное
преобразование электрической энергии:
входное синусоидальное напряжение с
постоянной амплитудой и частотой
выпрямляется в управляемом выпрямителе,
фильтруется, сглаживается и затем вновь
преобразуется инвертором в переменное
напряжение изменяемой частоты и
амплитуды.
Двойное преобразование энергии приводит
к снижению КПД. Для формирования выходного
синусоидального переменного напряжения
используют автономные инверторы
напряжения и автономные инверторы тока.
В электронных ключах применяют запираемые
тиристоры GTO, их
усовершенствованные модификации GCT, IGCT, SGCT и биполярные транзисторы с изолированным
затвором IGBT, MOSFET, BIMOSFET. Главным
достоинством тиристорных преобразователей
частоты, как и в схеме с непосредственной
связью, является способность работать
с большими токами и напряжениями,
выдерживая при этом продолжительную
нагрузку и импульсные воздействия.
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном электроприводе в диапазоне мощности от сотен кВт до десятков МВт с выходным напряжением 3 – 10 кВ и выше. Однако тиристор является не полностью управляемым полупроводниковым прибором: для его включения достаточно подать короткий импульс на управляемый вход, а для выключения необходимо либо приложить обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого требуется сложная система управления.
Биполярные транзисторы с изолированным
затвором IGBT и другие
отличают от тиристоров полная
управляемость, простая система управления,
самая высокая рабочая частота. При этом
расширяется диапазон управления скорости
вращения двигателя, повышается
быстродействие привода, а применение IGBT транзисторов в
асинхронном приводе с векторным
управлением позволяет на низких скоростях
работать без датчика положения ротора,
даёт более полную защиту от «бросков»
тока и от перенапряжения. Высокая рабочая
частота снижает уровень электрических
колебаний других высоких частот,
характерных для тиристорных преобразователей
частоты. Одна из возможных схем частотного
преобразователя переменного тока с
использованием транзисторов с
изолированным затвором приведена ниже.
Высокая рабочая
частота снижает уровень электрических
колебаний других высоких частот,
характерных для тиристорных преобразователей
частоты. Одна из возможных схем частотного
преобразователя переменного тока с
использованием транзисторов с
изолированным затвором приведена ниже.
Рисунок 18.17 — Схема частотного преобразователя переменного тока с использованием
обратноходового преобразователя (выделено на схеме)
Главным препятствием на пути использования IGBT транзисторов в высоковольтном приводе с прямым преобразованием частоты и при мощности больше 1 – 2 МВт являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля и требует эффективного отвода теплоты от кремниевого кристалла транзистора.
Подборка схем регулятора оборотов двигателя постоянного тока
Главная » Бытовая электроника » Подборка схем регулятора оборотов двигателя постоянного тока
Регулировать скорость вращения маломощного коллекторного электродвигателя можно путем подключения постоянного резистора в цепь питания.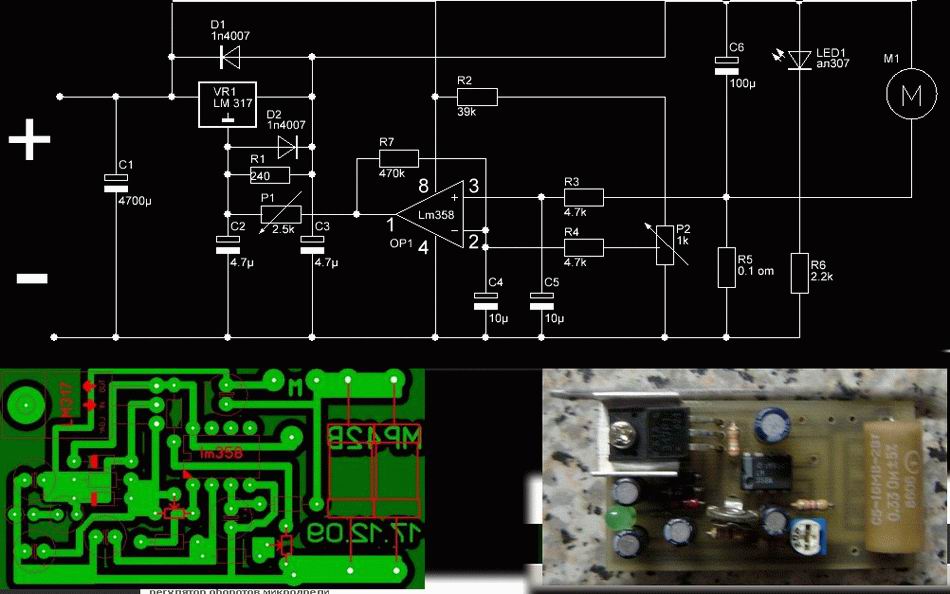 Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения. Ниже рассмотрим четыре варианта регулятора оборотов двигателя постоянного тока лишенных этих недостатков.
Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения. Ниже рассмотрим четыре варианта регулятора оборотов двигателя постоянного тока лишенных этих недостатков.
Данные схемы так же можно с успехом использовать и для изменения яркости свечения 12 вольтовых ламп накаливания.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
ШИМ регулятор оборотов двигателя. На однопереходном транзисторе VT1 (КТ117А) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 (К140УД7) играет роль компаратора, создающего ШИМ, поступающий на базу транзистора VT2 (КТ817Б).
Изменение скорости вращения двигателя осуществляется с помощью переменного резистора R5, который меняет длительность импульсов. Так как, амплитуда ШИМ постоянна и равна напряжению питания электродвигателя, двигатель не остановиться даже при очень малой скорости вращения.
Вторая схема
Эта схема схожа с предыдущей, но в роли задающего генератора использован дополнительный операционный усилитель DA1 (К140УД7).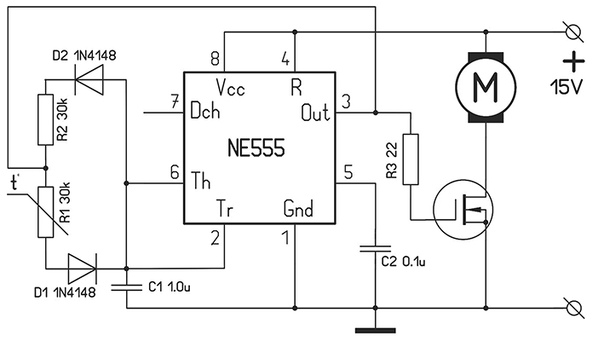
Этот ОУ работает как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Эта схема своеобразная и построена на популярном таймере NE555. Задающий генератор работает с частотой 500 Гц. Ширину импульсов, а следовательно, и частоту вращения двигателя возможно изменять в диапазоне от 2 % до 98 %.
Четвертая схема
Слабым местом во всех вышеприведенных схемах является то, что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя. Решить эту проблему можно с помощью следующей схемы:
Блок питания 0…30В/3A
Набор для сборки регулируемого блока питания…
Подробнее
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых составляет 2 кГц. Суть схемы — присутствие положительной обратной связи (ПОС) через элементы R12, R11, VD1, C2 и DA1. 4, которая стабилизирует частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
4, которая стабилизирует частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не происходят автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах можно использовать следующие детали: транзистор КТ817Б — КТ815, КТ805; КТ117А можно заменить на КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 можно поменять мощным полевым транзистором, например, IRF3905 или ему подобным.
Инвертор 12 В/ 220 В
Инвертор с чистой синусоидой, может обеспечивать питание переменно…
Подробнее
Categories Бытовая электроника Tags Двигатель
Отправить сообщение об ошибке.
Понимание эффекта ШИМ при управлении бесщеточным двигателем постоянного тока
Цели обучения
- Понимание коммутации бесщеточного двигателя постоянного тока.

- Обзор регулирования ШИМ для бесколлекторных двигателей постоянного тока.
- Узнайте пределы ШИМ для бесколлекторных двигателей постоянного тока.
Разработчики систем управления движением часто сталкиваются с трудностями при выборе или разработке электроники, использующей широтно-импульсную модуляцию (ШИМ) для управления бесщеточными двигателями постоянного тока. Полезно помнить о некоторых основных физических явлениях, чтобы избежать непредвиденных проблем с производительностью. В этом документе приведены общие рекомендации по использованию ШИМ-драйвера с бесщеточным двигателем постоянного тока.
Рис. 1: Пример Н-моста трехфазного двигателя, состоящего из шести транзисторов и подключенного к трем фазам двигателя. Предоставлено: Portescap
Коммутация бесщеточного двигателя постоянного тока
В отличие от щеточных двигателей постоянного тока, в которых коммутация осуществляется механически щетками, бесщеточные двигатели постоянного тока коммутируются электронным способом.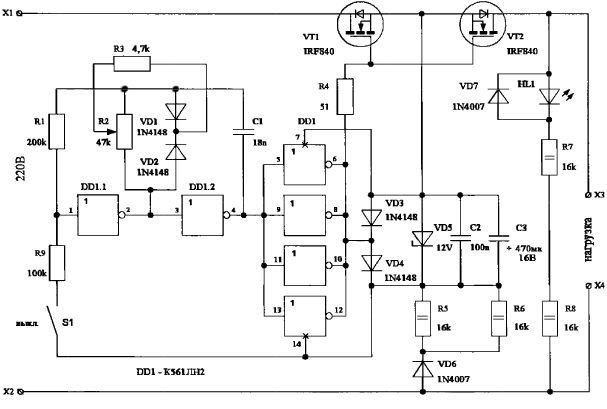 Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Рис. 2: Схематическое поперечное сечение запуска бесщелевого двигателя постоянного тока Шаг 3. Синяя область — это ротор с двухполюсным постоянным магнитом. Магнитное поле, создаваемое магнитом, показано синей стрелкой. Оранжевая область — трехфазная обмотка. Когда ток течет из фазы A в фазу C, он индуцирует магнитное поле, которое для упрощения представлено оранжевой стрелкой. Ротор будет вращаться, когда обе стрелки выровняются. Привод будет коммутировать фазы (вращая магнитное поле статора, оранжевая стрелка), чтобы поддерживать угол как можно ближе к 90 градусов между магнитными полями статора и ротора (максимальный создаваемый крутящий момент).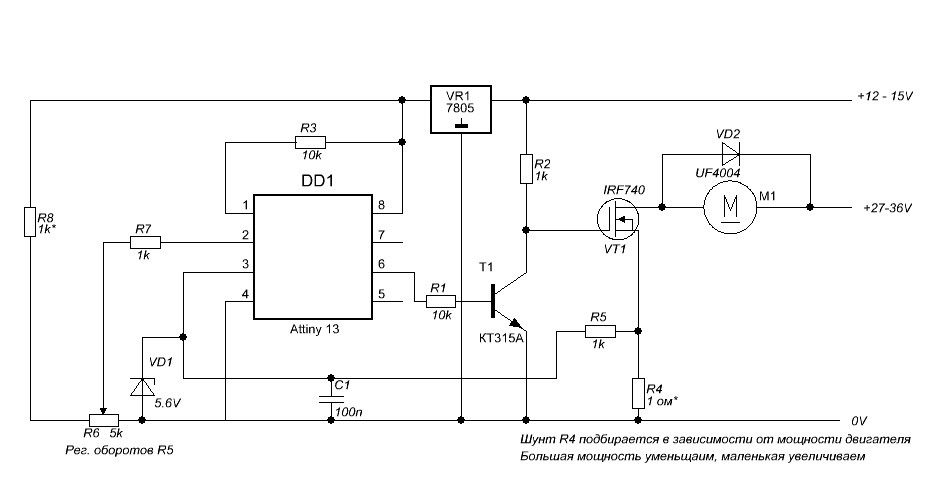 Предоставлено: Portescap
Предоставлено: Portescap
Открытие и закрытие транзисторов в определенной последовательности возбуждает фазы двигателя для поддержания оптимальной ориентации магнитного поля, индуцируемого статором по отношению к магниту ротора (см. рис. 2, рис. 3 и рис. 4).
Рис. 3. Фазный ток и состояние датчика Холла с шестиступенчатой коммутацией. Предоставлено: Portescap
Двигатель может приводиться в действие широко используемой шестиступенчатой трапециевидной коммутацией (см. рис. 3) или может использоваться для достижения более совершенного векторного управления, также называемого поле-ориентированным управлением (FOC). , в зависимости от сложности электроники (см. рис. 4).
Рис. 4: Фазный ток при использовании усилителя на ВОК. Предоставлено: Portescap
Регулирование ШИМ для бесщеточных двигателей постоянного тока
В щеточном (см. рис. 5) или бесщеточном двигателе постоянного тока (см. рис. 6) рабочая точка (скорость и крутящий момент) приложения может варьироваться. Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то, и другое, для достижения желаемого выходного сигнала движения.
Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то, и другое, для достижения желаемого выходного сигнала движения.
Часто существует два разных способа изменения напряжения или тока:
- Линейные драйверы (или линейные усилители)
- Драйверы прерывателя (или линейные усилители).
Линейные усилители регулируют мощность, подаваемую на двигатель, путем изменения напряжения или тока. Мощность, которая не передается двигателю, рассеивается (потеря мощности, см. рис. 6). В результате для рассеивания мощности требуется большой радиатор, что увеличивает размер усилителя и затрудняет его интеграцию в приложение.
Усилитель-прерыватель модулирует напряжение (и ток) путем включения и выключения силовых транзисторов. Основным преимуществом является экономия энергии, когда транзистор выключен. Это помогает продлить срок службы батареи приложения, меньше нагревает электронику и позволяет уменьшить размер электроники. Большую часть времени в усилителях с прерывателем используется метод ШИМ.
Рисунок 5: Сравнение архитектуры управления движением между щеточным двигателем постоянного тока и бесщеточным двигателем постоянного тока. Предоставлено: Portescap
Метод ШИМ заключается в изменении рабочего цикла на фиксированной частоте (см. рис. 7) для регулировки напряжения или тока в пределах желаемого целевого значения. Обратите внимание, что одним из преимуществ метода ШИМ для прерывания тока по сравнению с другими методами является то, что частота переключения является фиксированным параметром. Это облегчает разработчикам электроники фильтрацию генерируемых акустических и электромагнитных помех.
Рис. 6: Пример линейного усилителя, питающего двигатель. Мощность, постоянно рассеиваемая драйвером для этой катушки двигателя, составляет: P_dissipated (усилитель) = (24 – 19) * 1 = 5 Вт Предоставлено: Portescap
двигатель является полным напряжением шины. Когда транзистор открыт 50 % времени, среднее напряжение, подаваемое на двигатель, составляет половину напряжения на шине.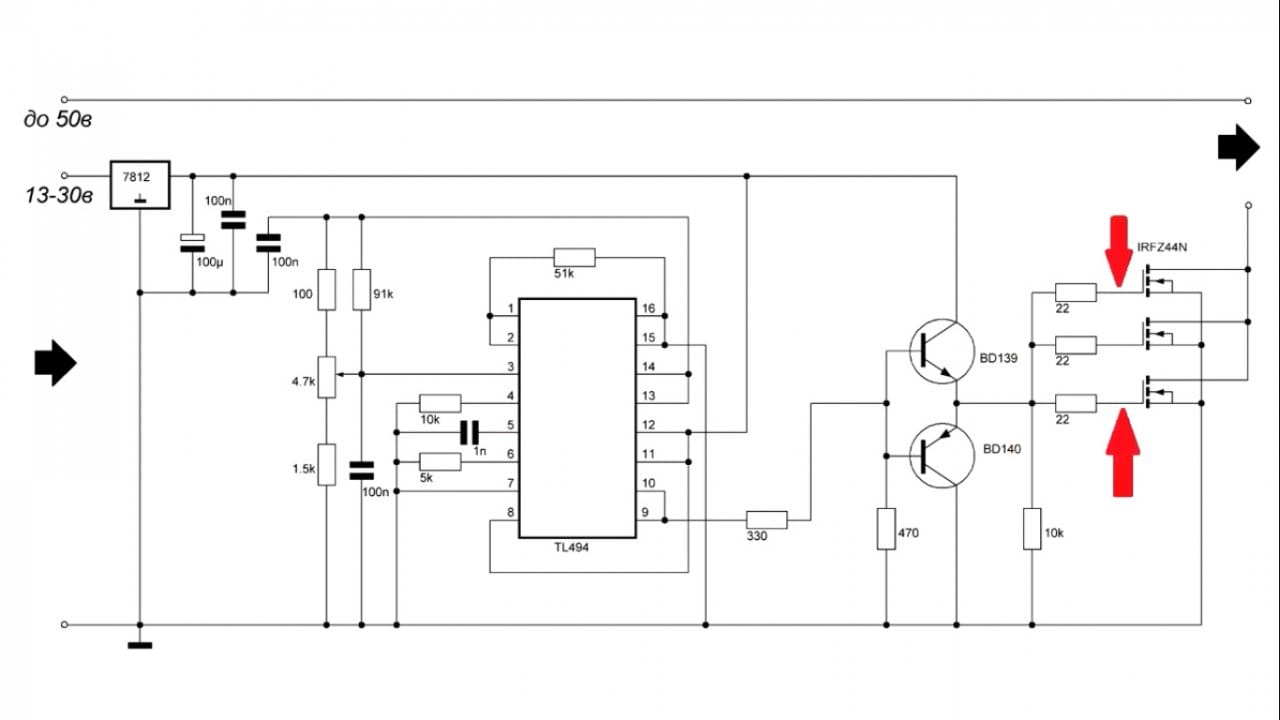 Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Рисунок 7: Различные рабочие циклы ШИМ. Обратите внимание, что частота одинакова для всех случаев, тогда как среднее напряжение (пунктирная линия) пропорционально коэффициенту заполнения. Предоставлено: Portescap
Эффект индуктивности в бесщеточных двигателях постоянного тока
Двигатель постоянного тока характеризуется индуктивностью L, сопротивлением R и противоэлектродвижущей силой (противо-ЭДС) E, включенными последовательно. Обратная ЭДС представляет собой напряжение, вызванное магнитной индукцией (закон индукции Фарадея-Ленца), которое противодействует приложенному напряжению и пропорционально скорости двигателя. См. рис. 8, на котором показан двигатель при включенной и выключенной ШИМ.
Рисунок 8: Упрощенные эквивалентные схемы, представляющие двигатель постоянного тока, когда ШИМ включен (слева) и выключен (справа). Для простоты правая схема соответствует режиму медленного затухания (ток рециркулирует в двигателе). Предоставлено: Portescap
Предоставлено: Portescap
А пока, для простоты, давайте не будем рассматривать обратную ЭДС.
При подаче напряжения или отключении напряжения в цепи RL дроссель будет препятствовать изменению тока. При приложении напряжения U к цепи RL ток будет следовать экспоненциальному росту первого порядка, динамика которого зависит от электрической постоянной времени τ, равной отношению L/R (см. рис. 9).). Оно асимптотически достигнет стационарного значения, то есть 99,7% U/R, после 5-кратного увеличения постоянной времени.
Рис. 9: Экспоненциальный рост тока в цепи RL. Предоставлено: Portescap
Такое же экспоненциальное поведение будет наблюдаться при разрядке цепи RL. См. рис. 10.
На практике бесщеточные усилители постоянного тока имеют довольно высокую частоту ШИМ и не позволяют току достичь установившегося состояния. Эта частота обычно выше 50 кГц, поэтому ток можно правильно модулировать с достаточным количеством циклов, возникающих на каждом этапе коммутации. Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Рисунок 10: Экспоненциальное падение тока в цепи RL. Предоставлено: Portescap
Бесщеточные двигатели постоянного тока имеют электрическую постоянную времени τ, равную нескольким сотням микросекунд. Таким образом, у тока будет время среагировать во время каждого цикла ШИМ (см. рис. 11). Однако механическая постоянная времени находится в диапазоне нескольких миллисекунд, поэтому разница между механической и электрической постоянной времени составляет 10. Поэтому ротор самого двигателя не успеет среагировать при переключении напряжения на типичных частотах ШИМ. Низкие частоты ШИМ в несколько тысяч герц могут вызывать вибрации ротора и слышимый шум. Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Пределы ШИМ для бесколлекторных двигателей постоянного тока
ШИМ приводит к нарастанию и падению тока в каждом цикле. Разница между минимальным и максимальным значением тока называется пульсацией тока ∆ I (см. рисунок 11). Пульсации сильного тока могут быть проблематичными. Желательно, чтобы он был как можно ниже.
Рис. 11: Типичные пульсации тока, создаваемые ШИМ с частотой 50 кГц в установившемся режиме (рабочий цикл 80 %). Рабочий цикл одинаков в обоих случаях, поэтому средний ток одинаков. На графике слева показаны низкие пульсации тока. Среднеквадратичное значение тока близко к среднему значению тока. На графике справа показаны высокие пульсации тока. Среднеквадратичное значение тока значительно выше, чем среднее значение тока. Предоставлено: Portescap
Крутящий момент двигателя постоянного тока пропорционален среднему току, как показано в формуле:
Обратите внимание, что для крутящего момента двигателя необходимо учитывать средний ток I avg .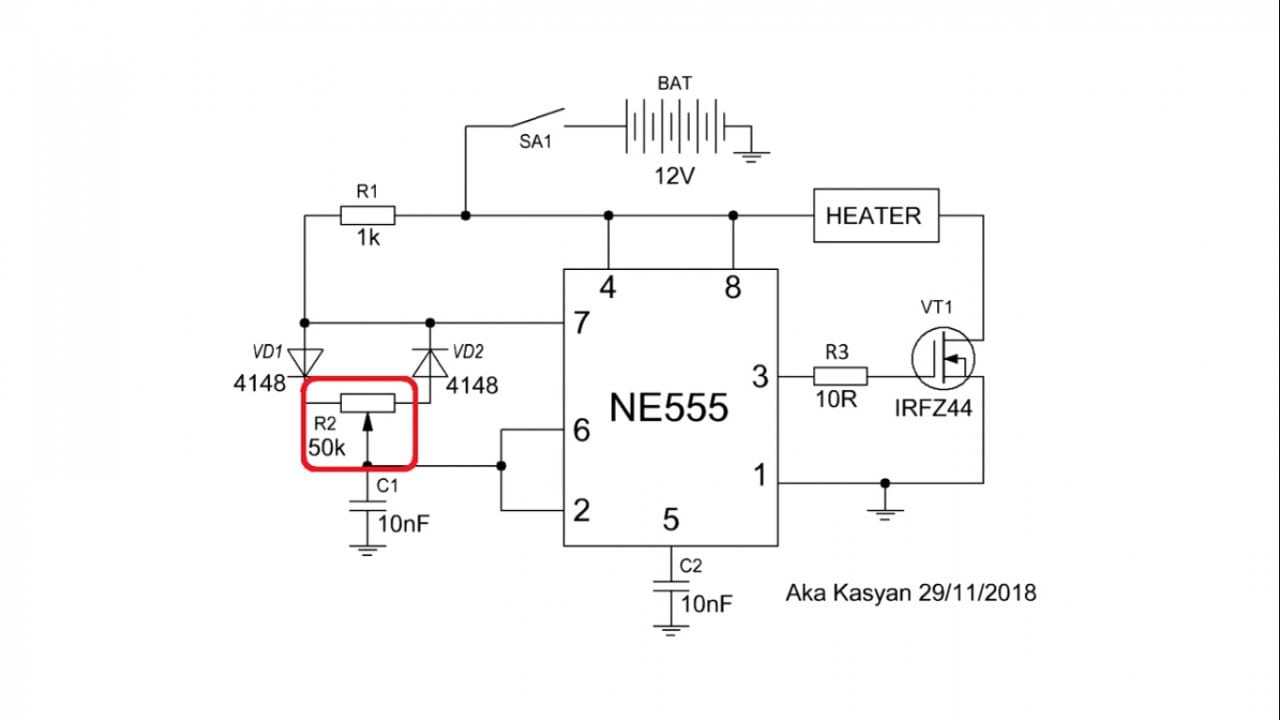 Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рисунке 11, средний ток одинаков в обоих случаях (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рисунке 11, средний ток одинаков в обоих случаях (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
В отличие от щеточных двигателей постоянного тока, бесщеточные двигатели постоянного тока не имеют щеток. Сильные пульсации тока не являются проблемой для самого срока службы. Пульсации тока будут иметь большое влияние на потери двигателя, вызывая ненужный нагрев. Пульсация тока приведет к двум типам потерь:
Потери в джоулях
Пульсации тока увеличат среднеквадратичное значение тока, которое является значением, учитываемым при расчете потерь в джоулях. Пульсации будут генерировать дополнительный нагрев без увеличения среднего тока и, следовательно, без увеличения крутящего момента. Обратите внимание, что это прямоугольная зависимость от среднеквадратичного значения тока.
Если T – период времени ШИМ, среднеквадратичное значение тока можно рассчитать по формуле:
Потери в стали
магнитное поле в проводящем материале будет индуцировать напряжение, которое затем будет генерировать циркулирующие токи, называемые вихревыми токами.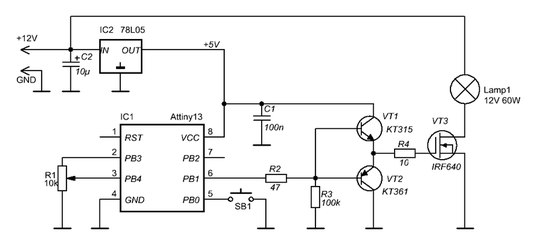
Потери на вихревые токи пропорциональны квадрату скорости двигателя и квадрату тока двигателя. Основываясь на практических измерениях, когда пульсации тока высоки, дополнительные потери в стали могут стать значительными. Важно, чтобы пульсации тока были как можно меньше.
Давайте определим формулу текущей пульсации, чтобы мы могли определить рекомендации по ее минимизации.
Из схемы двигателя (см. рис. 8) мы можем вывести уравнение двигателя:
Предположим, что изменение тока является линейным в течение коротких периодов времени T_ON и T_OFF. Следовательно, мы можем переписать дифференциальное уравнение следующим образом:
В предположении установившегося состояния пульсации тока постоянны:
Таким образом, два уравнения можно объединить в одно:
Мы можем упростить уравнение, введя коэффициент заполнения D и частоту ШИМ f ШИМ:
Отсюда можно вывести формулу пульсаций тока ∆I:
Вариация пульсаций тока в зависимости от рабочего цикла ШИМ представляет собой параболу, как показано на рисунке 12.
Рисунок 12: Пульсации тока в зависимости от рабочего цикла ШИМ. Предоставлено: Portescap
Максимальное значение пульсаций достигается при коэффициенте заполнения 50%, т.е. D=0,5:
Из уравнения. 15, есть несколько параметров, влияющих на:
- Источник питания U ШИМ
- Рабочий цикл D
- Частота ШИМ f ШИМ 90 008
- Индуктивность Л.
Рекомендации к минимизация пульсаций тока в бесщеточных двигателях постоянного тока
Мы можем дать некоторые рекомендации по минимизации пульсаций:
Уменьшить или адаптировать напряжение питания
Пульсации тока пропорциональны напряжению источника питания. Наличие высокого напряжения питания может быть полезно для достижения экстремальных рабочих точек, требующих высокой скорости или большей мощности. Однако, если приложение не требует высокой скорости или мощности, более низкое напряжение питания будет полезно для уменьшения пульсаций тока.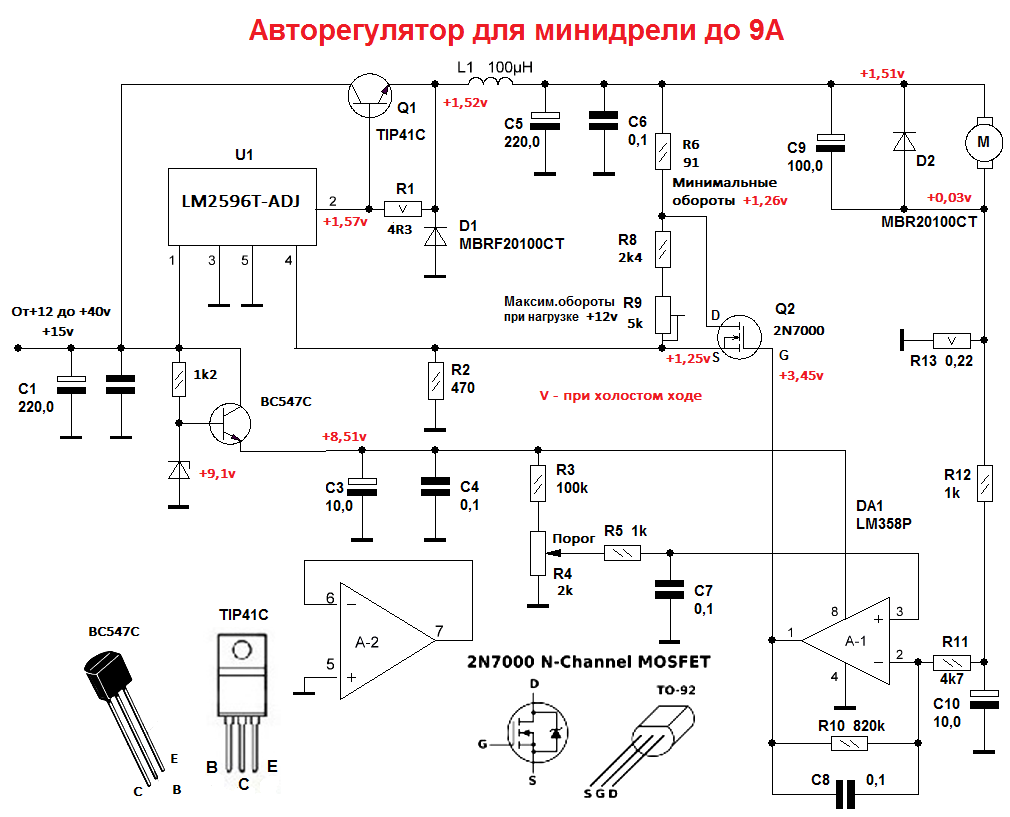 Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно, чтобы рабочий цикл ШИМ был как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно, чтобы рабочий цикл ШИМ был как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Увеличьте частоту ШИМ
Чем выше частота, тем короче время цикла ШИМ; следовательно, у тока будет меньше времени для роста. Для бесколлекторных двигателей постоянного тока рекомендуются частоты ШИМ не менее 50 кГц. Частоты ШИМ 80 кГц и более были бы даже более подходящими для двигателей с очень малой электрической постоянной времени.
Увеличение индуктивности
Бесщеточные двигатели постоянного тока имеют очень маленькое значение индуктивности. Рекомендуется добавить внешние индуктивности, так как они будут замедлять нарастание и падение тока, тем самым уменьшая пульсации тока. Кроме того, указанное значение индуктивности дано для частоты ШИМ 1 кГц. Поскольку индуктивность двигателя изменяется в зависимости от частоты ШИМ, при типичной частоте ШИМ 50 кГц индуктивность может уменьшиться до 70 % от указанного значения.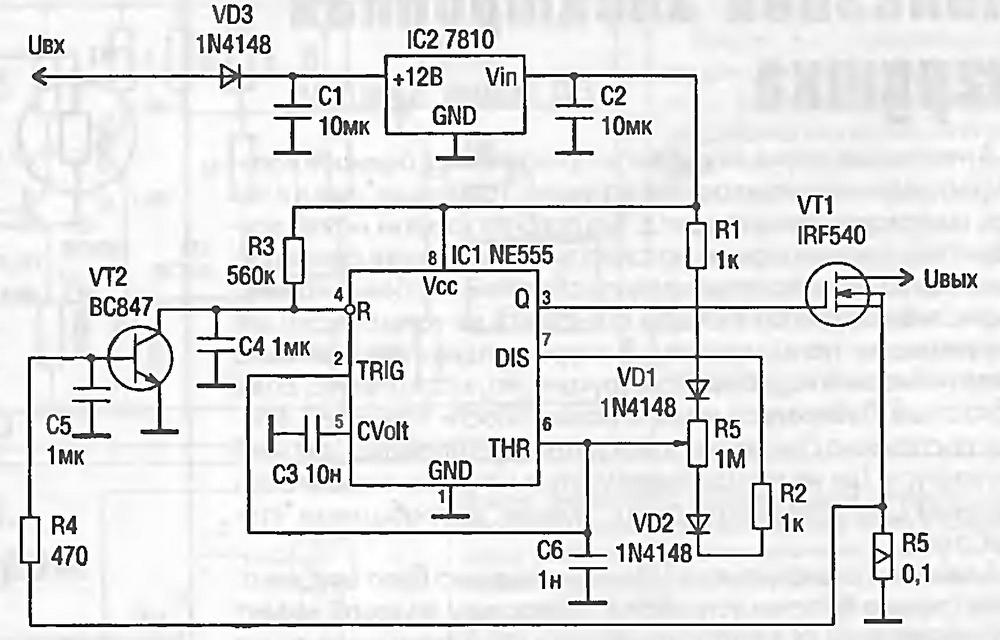 Часто добавляют дополнительные индуктивности в несколько десятков мкГн. Оптимальное значение индуктивности часто подтверждается экспериментально. Необходимо добавить дополнительные индуктивности, как показано на рис. 13.
Часто добавляют дополнительные индуктивности в несколько десятков мкГн. Оптимальное значение индуктивности часто подтверждается экспериментально. Необходимо добавить дополнительные индуктивности, как показано на рис. 13.
Рисунок 13: Бесщеточный двигатель с дополнительной индуктивностью. Предоставлено: Portescap
Хотя это решение решит текущую проблему с пульсациями, может быть непросто интегрировать дополнительные индуктивности, особенно когда пространство ограничено. Поэтому часто целесообразно сначала изучить два других варианта.
ШИМ имеет много преимуществ и является наиболее широко используемым решением для бесколлекторных драйверов постоянного тока. Установка соответствующего напряжения ШИМ и использование высокой частоты ШИМ поможет уменьшить пульсации и избежать использования дополнительных индуктивностей. Сегодняшняя стоимость электронных компонентов делает простым решением использование высокой частоты ШИМ. Разработчики электроники должны учитывать эти параметры при разработке системы управления движением, когда важны размер и вес электроники (например, портативные устройства со встроенной электроникой) или когда срок службы батареи является ключевым критерием (дополнительная энергия, рассеиваемая джоулевыми потерями на внутреннее сопротивление). дополнительных индуктивностей).
дополнительных индуктивностей).
Матье Буа — инженер по применению, Portescap. Под редакцией Марка Т. Хоске, менеджера по контенту, Control Engineering, CFE Media , [email protected].
КЛЮЧЕВЫЕ СЛОВА: Бесщеточные двигатели постоянного тока, широтно-импульсная модуляция
ПОСМОТРИТЕ НА ЭТО
Вы решаете проблемы выбора или разработки электроники с использованием широтно-импульсной модуляции (ШИМ) для управления бесщеточными двигателями постоянного тока?
ОНЛАЙН
www.controleng.com/discrete-manufacturing/motors-drives
www.portescap.com
Есть ли у вас опыт и знания по темам, упомянутым в этом содержании? Вам следует подумать о том, чтобы внести свой вклад в нашу редакционную команду CFE Media и получить признание, которого вы и ваша компания заслуживаете. Нажмите здесь, чтобы начать этот процесс.
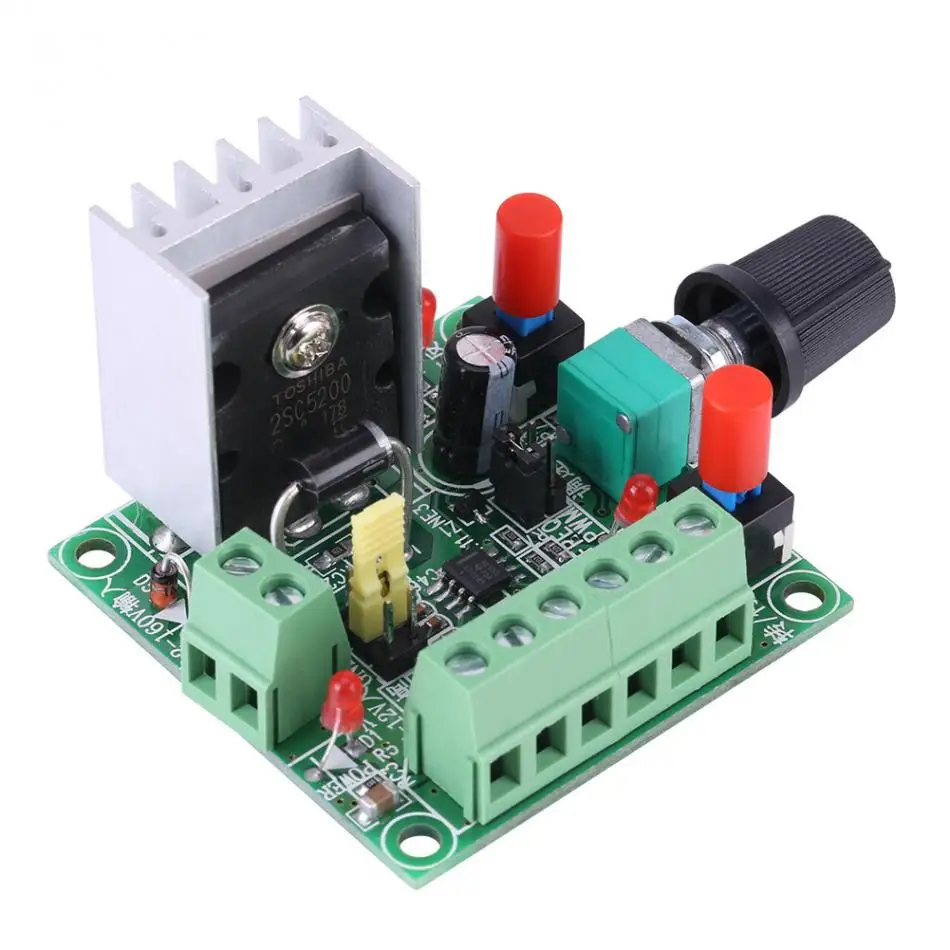
Учебное пособие по регулятору скорости двигателя.
 Инженерное мышление
Инженерное мышлениеИзучите основы регулятора скорости электродвигателя. В этой статье мы узнаем, как спроектировать простой ШИМ-регулятор скорости для двигателя постоянного тока, изучая, как протекает ток в цепи и что делает каждый компонент. Вы даже можете построить схему самостоятельно!
Прокрутите вниз, чтобы посмотреть обучающее видео на YouTube.
Это простой контроллер скорости с широтно-импульсной модуляцией для двигателя постоянного тока, который использует один из них, таймер 555, и мы собираемся показать вам, как работает схема, как ее спроектировать и даже превратить в профессионала. ищу печатную плату. Вы даже можете скачать копию нашей печатной платы и собрать свой собственный ЗДЕСЬ.
Проектирование схемы
Сердцем нашей системы является таймер 555. Это компонент интегральной схемы, а это означает, что внутри него находится несколько более мелких компонентов, объединенных в один корпус, что значительно облегчает нашу работу как дизайнеров.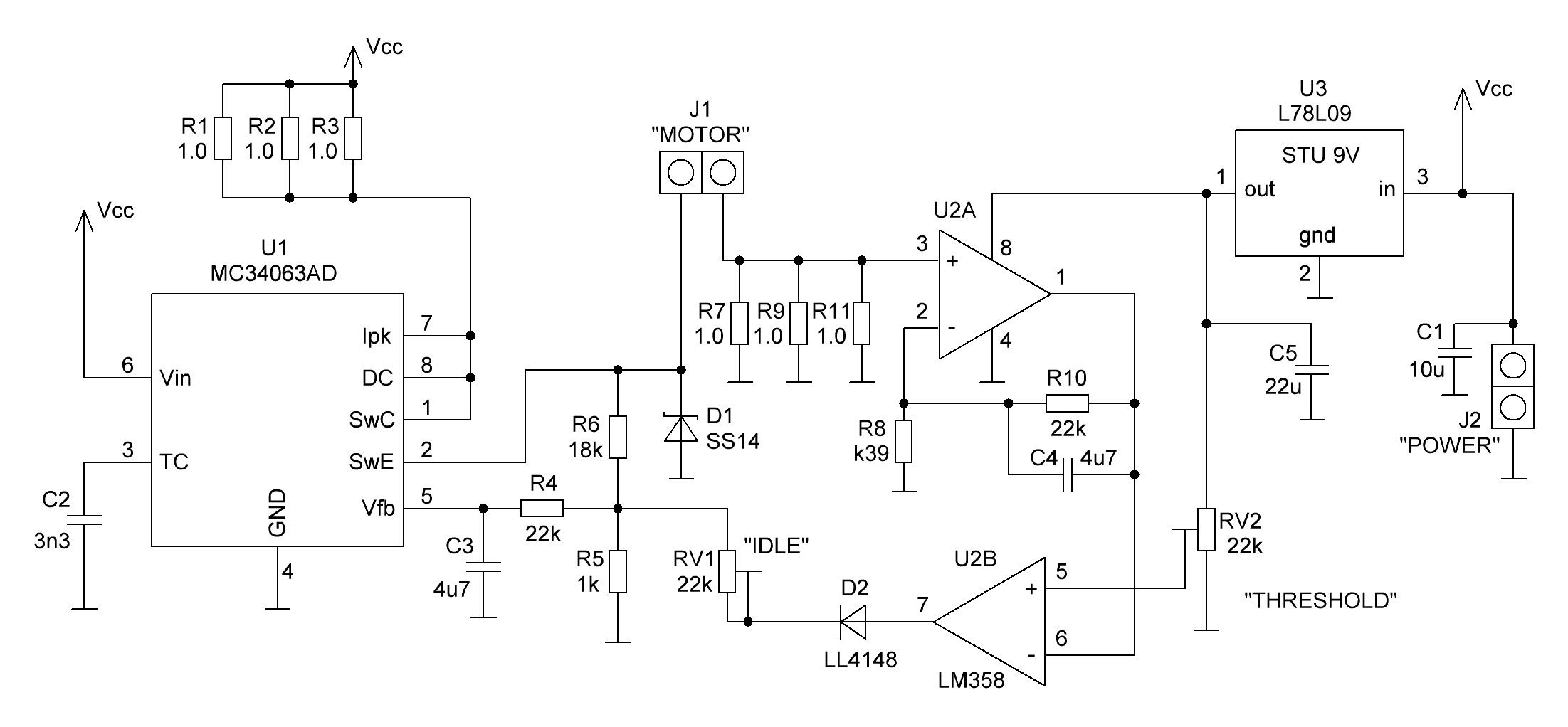 Мы увидим, как этот компонент работает, когда будем строить схему.
Мы увидим, как этот компонент работает, когда будем строить схему.
Теперь мы собираемся использовать Altium Designer для этого проекта, который любезно спонсировал эту статью. Все наши зрители могут получить бесплатную пробную версию программы ЗДЕСЬ.
Мы начинаем новый проект и создаем нашу схему, а также файл платы. Затем нам нужно начать добавлять наши компоненты, мы можем использовать встроенный инструмент, но мы собираемся использовать надстройку, которая, по нашему мнению, немного упростит задачу. Находим компонент на сайте поставщиков, мы используем mouser, но вы можете использовать кого хотите.
Мы нашли таймер 555, поэтому мы берем номер детали, вставляем его в загрузчик библиотеки и нажимаем «Поиск», он находит компонент, поэтому мы нажимаем «Добавить в дизайн».
Таймер 555 может выдерживать максимальную нагрузку около 200 миллиампер. Мы собираемся управлять одним из этих двигателей постоянного тока от источника питания 12 В, и мы видим, что при 12 В он потребляет ток около 1,4 А, и это без нагрузки, что уже больше, чем может выдержать таймер 555. Поэтому нам нужно будет использовать МОП-транзистор, который представляет собой тип электронного переключателя.
Поэтому нам нужно будет использовать МОП-транзистор, который представляет собой тип электронного переключателя.
Кстати, мы подробно рассмотрели, как работают двигатели постоянного тока, в нашей предыдущей статье ЗДЕСЬ .
Мы собираемся использовать полевой МОП-транзистор IRFZ24N, потому что он может работать как с напряжением, так и с током, а также имеет низкое сопротивление сток-исток в открытом состоянии. Итак, мы находим этот компонент и добавляем его в схему. Двигатель будет подключен к выводу стока MOSFET, а вывод истока соединится с землей.
МОП-транзистор обычно блокирует ток, поэтому двигатель не вращается. Однако, если мы подадим небольшое напряжение на вывод затвора, это позволит протекать некоторому току. Чем выше приложенное напряжение, тем больший ток может протекать, и поэтому двигатель вращается быстрее.
Таймер 555 подает напряжение на контакт затвора MOSFET с контакта 3. Для изменения напряжения и управления скоростью двигателя он посылает его в виде импульсов. Каждый импульс длится определенный период времени, в течение которого будет сегмент, когда сигнал включен, поэтому подается напряжение, и сегмент, когда сигнал выключен, поэтому напряжение не подается. Таким образом, МОП-транзистор будет испытывать среднее напряжение для каждого периода времени. Чем шире импульс включения, тем выше будет среднее напряжение. Это широтно-импульсная модуляция, расчеты для которой вы можете увидеть далее в статье.
Каждый импульс длится определенный период времени, в течение которого будет сегмент, когда сигнал включен, поэтому подается напряжение, и сегмент, когда сигнал выключен, поэтому напряжение не подается. Таким образом, МОП-транзистор будет испытывать среднее напряжение для каждого периода времени. Чем шире импульс включения, тем выше будет среднее напряжение. Это широтно-импульсная модуляция, расчеты для которой вы можете увидеть далее в статье.
Ток на вывод затвора очень мал, но мы поместим резистор 1 кОм между выводом затвора MOSFET и выводом 3 таймера 555, это защитит компонент, ограничив ток, если MOSFET выйдет из строя, и пропустит ток вытекать из ворот.
Заряд электронов будет накапливаться на контакте затвора MOSFET, и нам нужно разрядить его, чтобы выключить его, поэтому мы размещаем еще один резистор на 1 кОм и подключаем его к земле, которая обеспечивает путь разряда.
Я хочу подключить двигатель и источник питания снаружи от печатной платы, поэтому теперь я добавлю клемму для входа и еще одну для подключения двигателя.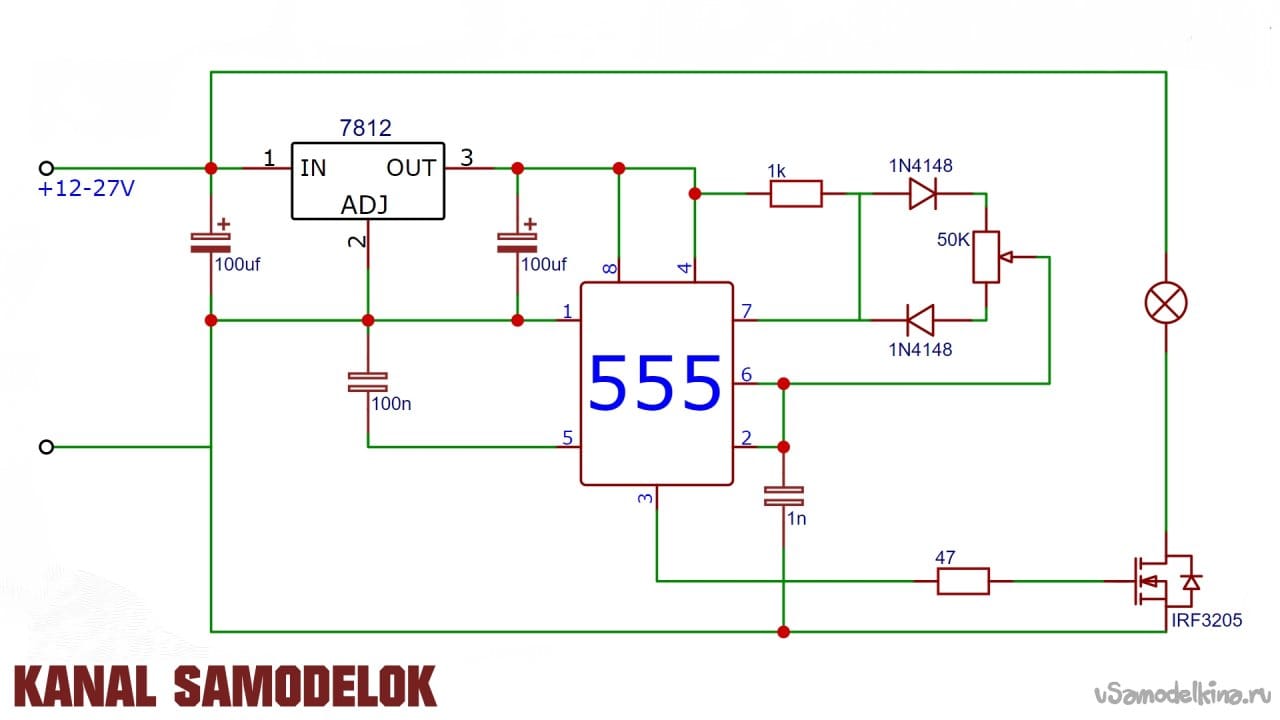 Я также хочу, чтобы встроенный переключатель включал и выключал контроллер, поэтому я нашел подходящий переключатель и добавил его. Теперь мы подключим входную клемму к земле, а затем подключим источник питания к переключателю. Затем мы подключаем выход переключателя к клемме двигателя. Затем подключите клемму двигателя к сливному штырьку MOSFET.
Я также хочу, чтобы встроенный переключатель включал и выключал контроллер, поэтому я нашел подходящий переключатель и добавил его. Теперь мы подключим входную клемму к земле, а затем подключим источник питания к переключателю. Затем мы подключаем выход переключателя к клемме двигателя. Затем подключите клемму двигателя к сливному штырьку MOSFET.
Электродвигатель состоит из витков проволоки, поэтому мы можем считать его катушкой индуктивности. Когда катушки индуктивности включены, они накапливают энергию в своем магнитном поле, когда мощность отключается, это магнитное поле разрушается, и катушка индуктивности выталкивает электроны через цепь. Это вызывает очень большой и внезапный всплеск энергии, который может повредить нашу цепь. Поэтому мы добавляем обратноходовой диод, который обеспечивает путь для безопасной циркуляции и уменьшения энергии. Для этого мы используем диод 1N4007, который выдерживает большой пиковый ток. Итак, мы добавляем это в схему.
Мы подробно рассмотрели катушки индуктивности, диоды и транзисторы в наших предыдущих статьях ЗДЕСЬ — Катушки индуктивности, диоды, транзисторы.
Теперь мы можем подключить контакт 8 таймера 555, который является источником питания компонентов, и мы подключаем его к плюсу. Затем подключаем контакт 1 к земле.
Внутри таймера у нас есть три резистора по 5 кОм между выводами 1 и 8, напряжение уменьшается на треть (1/3) после каждого резистора. Поскольку у нас есть 12 вольт на контакте 8, напряжение уменьшится до 8 вольт после первого резистора, а затем до 4 вольт после второго резистора. Таймер 555 использует их в качестве эталона.
К резисторам подключены два компаратора. Компаратор имеет положительный и отрицательный вход, а также один выход. Первый компаратор подключен к резисторам через отрицательный вход. Положительный вход подключен к контакту 6, пороговому контакту. Компаратор 2 подключен к резисторам через положительный вход. Его отрицательный вход подключен к контакту 2, триггерному контакту.
Теперь компараторы подключены к двум разным напряжениям, поэтому он может их сравнивать. Если положительное входное напряжение выше отрицательного, он выдает высокий сигнал или положительное напряжение. Если отрицательное входное напряжение равно или выше положительного входного напряжения, на выходе будет низкий сигнал или нулевое напряжение.
Если отрицательное входное напряжение равно или выше положительного входного напряжения, на выходе будет низкий сигнал или нулевое напряжение.
Соединим контакты 2 и 6 вместе, чтобы напряжение было одинаковым. Выход компараторов подключается к другому внутреннему компоненту, называемому триггером. Первый компаратор подключается к входу «сброс», второй компаратор подключается к входу «установка». Существует также вывод с именем «не Q». Когда триггер получает высокий уровень сигнала от компаратора 1, он выдает высокий уровень сигнала. Когда триггер получает высокий сигнал от компаратора 2, он выводит низкий сигнал. Если оба компаратора обеспечивают низкий уровень сигнала, триггер остается неизменным и продолжает работу. Затем он проходит через другой компонент, называемый инвертором, который просто инвертирует полученный сигнал.
Если это кажется запутанным, не волнуйтесь, это станет понятным через мгновение, когда мы будем проходить схему.
Если подать небольшое напряжение, скажем, 3,9 В на контакты 2 и 6, компаратор 1 выдаст низкий уровень сигнала, а компаратор 2 выдаст высокий сигнал.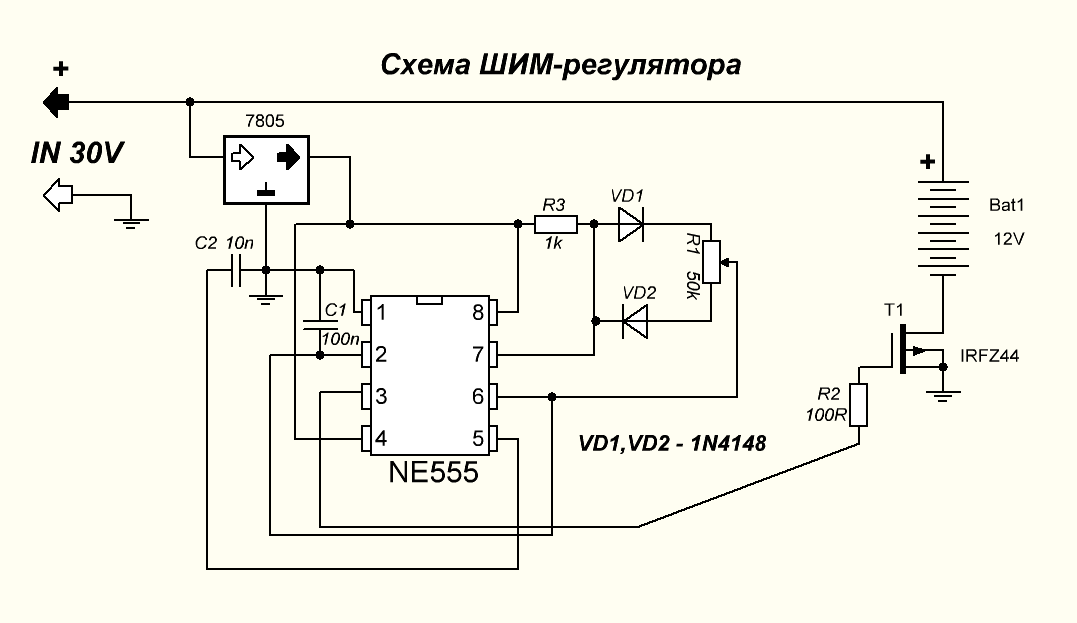 Это устанавливает временной интервал для начала. Триггер выдает низкий сигнал. Инвертор выдает высокий сигнал.
Это устанавливает временной интервал для начала. Триггер выдает низкий сигнал. Инвертор выдает высокий сигнал.
Как повышаем напряжение, например до 6 вольт. Компаратор 1 и 2 будут выдавать сигнал низкого уровня, триггер остается неизменным, отсчет времени продолжается. Но при напряжении 8 вольт компаратор 1 выдает высокий сигнал, а компаратор 2 выдает низкий сигнал. Выход триггера теперь меняется на противоположный, и на выходе высокий уровень. Это сбрасывает время.
Выход триггера остается неизменным до тех пор, пока напряжение не упадет примерно до 4 вольт, где компаратор 1 выдает низкий уровень сигнала, а компаратор 2 выдает высокий сигнал, это снова запускает таймер.
Итак, мы видим, что по мере увеличения и уменьшения напряжения на контактах 2 и 6 изменяется выход таймера 555. Итак, чтобы контролировать напряжение и, следовательно, временной интервал, мы подключаем контакты 2 и 6 к конденсатору.
Когда мы подключаем конденсатор к источнику питания, он мгновенно достигает напряжения батареи. Но если мы подключим его через резистор, резистор замедлит время зарядки. Чем больше резистор, тем больше времени требуется, чтобы зарядить напряжение.
Но если мы подключим его через резистор, резистор замедлит время зарядки. Чем больше резистор, тем больше времени требуется, чтобы зарядить напряжение.
Итак, чтобы зарядить наш конденсатор, мы будем использовать фиксированный резистор на 1 кОм и потенциометр на 100 кОм. Потенциометр представляет собой переменный резистор, поэтому мы можем изменять время зарядки конденсатора. Нам также потребуется разрядить конденсатор, чтобы перезапустить таймер. Итак, мы добавим два диода, чтобы создать отдельный путь заряда и разряда. Ток в этой части цепи очень мал, так как резисторы находятся в килоомном диапазоне. Мы будем использовать два диода 1N4148 с прямым током около 300 миллиампер, что вполне подойдет для данного приложения.
Конденсатор будет керамическим конденсатором емкостью 10 нанофарад, через мгновение мы поймем почему. Итак, мы добавляем эти компоненты в схему, затем подключаем диоды к постоянному резистору, а диоды к контактам 1 и 3 потенциометра. Затем подключаем конденсатор к земле, а также к контактам 2 и 6 таймера 555, а также к контакту 2 потенциометра.
Контакт 7 является разрядным контактом, который подключен к нашему конденсатору времени. Внутри таймера 555 выход триггера соединяется с выводом затвора внутреннего транзистора. Это контролирует поток тока от конденсатора к земле. Когда на выходе триггера низкий уровень, транзистор закрыт, поэтому конденсатор заряжается, и напряжение начинает увеличиваться. Когда напряжение увеличивается настолько, что на выходе триггера появляется высокий уровень, открывается транзистор, который разряжает конденсатор, и, таким образом, напряжение уменьшается. Когда оно достигает 4 Вольт, конденсатор снова начинает заряжаться, когда достигает 8 Вольт, он разряжается.
Вы можете узнать, как работают конденсаторы в нашей предыдущей статье ЗДЕСЬ
У нас также есть контакт 5, который является управляющим напряжением. Мы можем использовать это, чтобы переопределить компаратор 1. Нам это не нужно для этой схемы, поэтому мы подключаем его к земле через керамический конденсатор емкостью 0,1 мкФ. Заземление этого вывода предотвращает случайное переопределение, а конденсатор отфильтровывает любой шум или частоту.
Заземление этого вывода предотвращает случайное переопределение, а конденсатор отфильтровывает любой шум или частоту.
У нас также есть контакт 4, контакт сброса, который мы соединим с плюсом схемы. Мы могли бы использовать это, чтобы переопределить и сбросить триггер, отключив питание. Нам это не нужно для этой схемы, поэтому она подключена к плюсу.
Итак, при зарядке ток течет через резистор, диод и левую часть потенциометра к конденсатору. На выходе триггера низкий уровень, поэтому разрядный транзистор закрыт. Контакт 3 выводит высокий уровень сигнала.
Как только конденсатор заряжается до 8 В, на выходе триггера становится высокий уровень, который включает транзистор, и конденсатор разряжается через правую сторону потенциометра и диода. Контакт 3 выводит сигнал низкого уровня.
Транзистор остается открытым, поэтому конденсатор разряжается до тех пор, пока не достигнет 4 В, после чего триггер снова меняет направление, выключая транзистор и снова запуская отсчет времени. Этот цикл повторяется непрерывно. Конденсатор заряжается и разряжается, создавая пилообразную волну, а таймер 555 выдает прямоугольную волну с широтно-импульсной модуляцией.
Этот цикл повторяется непрерывно. Конденсатор заряжается и разряжается, создавая пилообразную волну, а таймер 555 выдает прямоугольную волну с широтно-импульсной модуляцией.
Мы можем рассчитать производительность следующим образом.
Конденсатор заряжается через резистор R1 и левую часть потенциометра. Таким образом, время зарядки рассчитывается по этой формуле. Если предположить, что потенциометр был на 50%. Тогда мы получим 0,35 миллисекунды.
Конденсатор разряжается через правую сторону потенциометра, поэтому время разрядки рассчитывается по этой формуле. Это дает нам 0,34 миллисекунды.
Каждый цикл представляет собой комбинацию времени включения и выключения, поэтому 0,35 плюс 0,34 дает нам 0,69.миллисекунды.
Частота равна 1, деленной на время цикла, что дает нам 1428 Гц.
Рабочий цикл рассчитывается таким образом, поэтому выход включен примерно 50% времени.
Мы используем конденсатор емкостью 10 нанофарад, потому что он обеспечивает очень высокую частоту, а двигатель постоянного тока лучше всего работает на высокой частоте.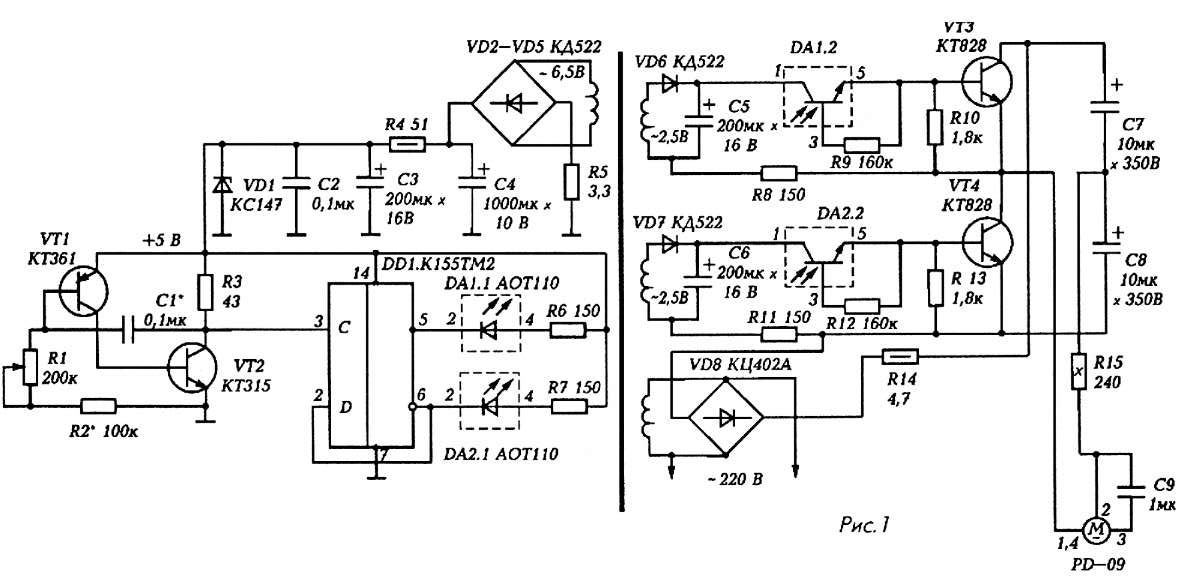 Если бы мы использовали очень большой конденсатор, например, 100 микрофарад, частота падала бы до 0,14 Герца, и каждый цикл выполнялся бы за 7 секунд. Таким образом, вы можете использовать конденсаторы других размеров, но учтите, как это повлияет на скорость двигателя.
Если бы мы использовали очень большой конденсатор, например, 100 микрофарад, частота падала бы до 0,14 Герца, и каждый цикл выполнялся бы за 7 секунд. Таким образом, вы можете использовать конденсаторы других размеров, но учтите, как это повлияет на скорость двигателя.
Хорошо, теперь я создам простой прототип на макетной плате, чтобы проверить, все ли работает. Вроде нормально, скорость можно регулировать, так что будем доделывать дизайн печатной платы.
Добавляем аннотации. Затем мы импортируем компоненты в файл проекта печатной платы и тратим некоторое время на перестановку компонентов на плате. Когда все будет готово, мы обрисовываем доску и преобразуем ее в «защиту». Затем определите форму платы. Мы добавляем текст на клеммы, чтобы знать полярность цепи, когда будем ее использовать. Затем мы будем использовать функцию автоматического маршрута, чтобы соединить все. Как только он будет завершен, мы увеличим ширину маршрутов, которые будут нести более высокое напряжение и ток. Увеличение до 1 мм должно быть в порядке. Вероятно, нам нужно будет переместить некоторые маршруты в лучшее место, так что проверьте свой дизайн. После того, как мы удовлетворены, мы создаем наш полигон. И, наконец, мы можем экспортировать наши файлы gerber.
Увеличение до 1 мм должно быть в порядке. Вероятно, нам нужно будет переместить некоторые маршруты в лучшее место, так что проверьте свой дизайн. После того, как мы удовлетворены, мы создаем наш полигон. И, наконец, мы можем экспортировать наши файлы gerber.
Изготовление печатной платы
Итак, теперь мы готовы к печати нашей печатной платы.
Мы собираемся использовать JLC PCB для печати нашей печатной платы, которая также любезно спонсировала это видео. Они предлагают исключительную ценность с 5 печатными платами всего за 2 доллара. Обязательно посмотрите их, я оставлю для вас ссылку в описании видео.
Не забудьте, что вы можете скачать мои файлы дизайна, снова ссылки в описании видео для этого.
Итак, мы просто авторизуемся и загрузим наш gerber-файл. Через несколько секунд он генерирует предварительный просмотр схемы на экране. Затем мы можем настроить дизайн с помощью различных цветов и материалов и т. д. Но я оставлю их по умолчанию и сохраню в корзину. Затем мы идем к кассе, заполняем наши почтовые данные, а затем выбираем вариант почтовых расходов. Я лично хочу, чтобы это было очень быстро, поэтому я выбираю экспресс-почту, которая дороже, вы можете выбрать более медленные методы, чтобы сэкономить на расходах. Затем отправляем заказ и оплачиваем.
Затем мы идем к кассе, заполняем наши почтовые данные, а затем выбираем вариант почтовых расходов. Я лично хочу, чтобы это было очень быстро, поэтому я выбираю экспресс-почту, которая дороже, вы можете выбрать более медленные методы, чтобы сэкономить на расходах. Затем отправляем заказ и оплачиваем.
Через несколько дней наша плата приходит по почте. Доски выглядят отлично, я очень доволен результатом.
Итак, начинаем припаивать компоненты к плате. Я начинаю с центра и продвигаюсь вперед. Я использую держатель для таймера 555, который предотвратит повреждение компонента от перегрева и позволит нам легко заменить компонент в случае неисправности. С такими сложными компонентами, как этот, мы можем использовать ленту, чтобы держать их на месте, пока мы их припаиваем.
Таким образом, мы припаиваем все компоненты на свои места, используя ленту везде, где это необходимо. И через несколько минут у нас должна получиться идеально выглядящая печатная плата.
Теперь для теста подключаем стендовый блок питания и двигатель к плате.