
Регулирование частоты вращения асинхронных двигателей
Страница 17 из 51
Асинхронные двигатели являются основой современного электропривода переменного тока. Эффективность работы этого электропривода во многом определяется возможностями регулирования частоты вращения.
Возможности асинхронных двигателей в отношении регулирования частоты вращения ротора определяются выражением .
.
Из этого выражения следует, что частоту вращения можно регулировать тремя способами: путем изменения частоты  , числа пар полюсов p и скольжения s. Рассмотрим каждый из этих способов подробнее.
, числа пар полюсов p и скольжения s. Рассмотрим каждый из этих способов подробнее.
Регулирование частоты вращения изменением частоты подводимого напряжения
Этот способ является в настоящее время наиболее перспективным. Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28,  регулируют и напряжение
регулируют и напряжение  , так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение
, так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение  с потоком Ф,
с потоком Ф, ,
,
следует, что напряжение  необходимо регулировать пропорционально частоте
необходимо регулировать пропорционально частоте 
 |
 .
.
Отклонение от этого закона приводит к изменению потока Ф, что нежелательно. Действительно, при увеличении потока возрастает насыщение магнитной цепи, растут потери в стали и намагничивающий ток. Уменьшение потока вызывает уменьшение максимального момента двигателя и ряд других нежелательных явлений.
При  механические характеристики двигателя имеют показанный на рис. 4.28,
механические характеристики двигателя имеют показанный на рис. 4.28,  пусковой момент двигателя возрастает, а максимальный несколько снижается. Рабочее скольжение двигателя остается небольшим, что характеризует экономичный режим работы двигателя. Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
пусковой момент двигателя возрастает, а максимальный несколько снижается. Рабочее скольжение двигателя остается небольшим, что характеризует экономичный режим работы двигателя. Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
Регулирование частоты вращения изменением числа пар полюсов
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
 .
.Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов
 , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
, а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора. |
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с  полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет
полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет 
 , а момент, развиваемый двигателем, снижается в два раза,
, а момент, развиваемый двигателем, снижается в два раза,  . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь
. В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь  полюса, но мощность обмотки
полюса, но мощность обмотки  возрастает в два раза, а момент двигателя остается постоянным
возрастает в два раза, а момент двигателя остается постоянным 
 |
Таким образом, для изменения числа пар полюсов в отношении  необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов
необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов  , при изменении направления тока в одной из них число полюсов уменьшается вдвое,
, при изменении направления тока в одной из них число полюсов уменьшается вдвое, 
 на
на  полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах

 . Тогда при меньшем числе полюсов
. Тогда при меньшем числе полюсов  .
.Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом
 и с постоянной мощностью
и с постоянной мощностью  . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
. Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя
 , момент же при этом не меняется.
, момент же при этом не меняется. |
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
 |
Регулирование частоты вращения изменением скольжения
|

Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения  приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,
приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается, .
.
Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения .
.
Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения .
.
 |
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34).
Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным. Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой.
 |
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения  использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор.
Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя. Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др., где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной. В этом случае направление передачи мощности скольжения меняется на противоположное.
Способы регулирования частоты вращения асинхронных двигателей
Существенным недостатком асинхронных электродвигателей является относительно сложное регулирование частоты их вращения.
Возможные способы регулирования частоты вращения асинхронных электродвигателей можно установить в результате анализа выражения, записанного относительно частоты вращения ротора двигателя: n2= 60f1(1 ‑s)/p. Анализ формулы показывает, что частоту вращения асинхронного двигателя можно изменить, меняя скольжение ротораs, число пар полюсоврдвигателя или частотуf1питающего напряжения.
Регулирование частоты вращения изменением скольжения возможно изменением подводимого к обмотке статора напряжения или изменением активного сопротивления в цепи ротора.
Регулирование частоты вращения изменением активного сопротивлениявозможно только для асинхронных двигателей с фазным ротором, в обмотку которого (посредством контактных колец) включается добавочное регулировочное сопротивление по такой же схеме, как и при пуске двигателя. Однако пусковое сопротивление не годится для регулирования скорости, так как оно не рассчитано на длительную работу. Регулировочное сопротивление должно выдерживать токи, сравнимые с пусковыми, в течение длительного времени.
При увеличении активного сопротивления цепи ротора значение критического скольжения ротора двигателя sкв соответствии с приведенной ранее формулой увеличивается.
Включая различные добавочные сопротивления можно получить семейство механических характеристик двигателя, примерно таких, какие показаны на рис. 11, из которых следует, что с увеличением активного сопротивления в цепи ротора при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, увеличенному сопротивлению. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование при этом способе возможно в широком диапазоне скольжений, однако при уменьшении частоты нарушается жесткость механической характеристики и увеличиваются электрические потери.
Регулирование частоты вращения изменением питающего напряжениявозможно за счет того, что критическое значение моментаМк, а следовательно, величинаМ(s) при любом скольжении пропорциональна квадрату питающего напряженияU12. Из приведенных на рис.12 кривых явно видно, что при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, уменьшенному напряжениюU1. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование асинхронного двигателя при этом способе возможно только в незначительном диапазоне скольжений, который ограничивается критическими моментом и скольжением ротора.
Следует отметить, что при уменьшении напряжения происходит резкое снижение критического момента двигателя, пропорционально квадрату напряжения и, следовательно, резкое уменьшение перегрузочной способности двигателя по кратности критического момента, что ограничивает область применения описанного способа.
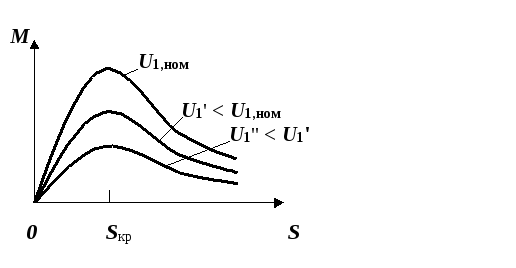
Рис. 12
Ступенчатое регулирование частоты вращения асинхронных электродвигателей с короткозамкнутым ротором, как указывалось, возможно путемизменения числа пар полюсовза счет переключения секций его обмотки, что находит применение для многоскоростных двигателей. Сущность способа заключается в том, что при постоянной частоте напряжения питающей сети, частота вращения асинхронного двигателя зависит от числа пар полюсов обмотки статора. Таким образом, если на статоре асинхронного двигателя разместить две или более отдельных обмоток с разными числами пар полюсов, то при включении в сеть каждой из обмоток в отдельности, можно получать различные частоты вращения магнитного поля, а значит, и ротора. К сожалению, этот экономичный и сравнительно простой способ не позволяет плавно регулировать частоту вращения двигателя. Промышленностью освоен выпуск серий электродвигателей, частота вращения которых регулируется ступенями в 2, 3 и 4 раза без потерь мощности. Необходимо также отметить, что устройство многоскоростных электродвигателей значительно сложней, чем односкоростных, что ведет к их удорожанию.Частоту вращения асинхронного двигателя можно регулировать также изменением частоты питающего тока, но этот способ для мощных двигателей практически не применяют ввиду отсутствия простых и экономичных устройств, регулирующих частоту тока в мощных цепях. В то же время, разработка и промышленное освоение мощных и дешевых управляемых полупроводниковых приборов (диоды, тиристоры) позволяет реализовывать простые и надежные преобразователи частоты и напряжения малой и средней мощности, с помощью которых можно легко регулировать частоту вращения асинхронных электродвигателей с короткозамкнутым ротором, что значительно упрощает привод различных механизмов, при этом часто отпадает необходимость в редукторах, коробках скоростей, трансмиссиях.
Способы регулирования скорости асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.6.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0и скольжениемs:
ω = ω0 – sабс
ω = ω0 – ω0s (6.1)

Рис.6.1. Классификация способов регулирования асинхронных двигателей
Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора _f1, и числом пар полюсов двигателярп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменением величины питающего напряжения при постоянной (стандартной) его частоте для асинхронных двигателей с короткозамкнутым ротором имеет ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения, выделяющимися в роторе двигателя и ведущими к его перегреву. Получаемые при этом способе механические характеристики неблагоприятны для качественного регулирования. Диапазон регулирования не превышает 1,5:1; более глубокое регулирование скорости можно допускать только кратковременно. Исходя из данной оценки, регулирование изменением величины питающего напряжения применяется, главным образом, только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скорости может производиться воздействием на роторную цепь двигателя. При введении добавочного сопротивления в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в сопротивлениях. Этот способ регулирования оценивается как неэкономичный. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных сопротивлений в цепь ротора используется, в основном, для пуска асинхронных двигателей с фазным ротором. Электроприводы с реостатно-контакторным управлением не рассматриваются нами, как регулируемые электроприводы.
Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных сопротивлений. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в сопротивлениях, а используется полезно – возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования – не больше, чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов-насосов и вентиляторов.
§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.

Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
Рис. 260. Энергетическая диаграмма асинхронного двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Рмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cos?2 (здесь ?2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора). Поэтому
M = cмФтI2 cos?2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге ?2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол ?2. Электромагнитный момент М зависит от скольжения s.
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos ?2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Ответы ЭМ
АСИНХРОННЫЕ МАШИНЫ
Единица измерения и определяющая формула электрического сопротивления
Ом,  R
= U / I
R
= U / I
Единица измерения и определяющая формула электрической проводимости
Сименс, G = 1 / R
Единица измерения и определяющая формула электрической емкости
Фарада, C = q / U
Единица измерения и определяющая формула магнитного потока
Вебер, Ф = q * R
Единица измерения и определяющая формула магнитной индукции.
Тесла, B = Ф / S
Единица измерения и определяющая формула намагничивающей силы.
Ампер-виток, F = W * I
Выберите правильную формулу для угловой частоты вращения магнитного потока статора.


Выберите правильную упрощенную формулу критического скольжения асинхронной машины.
R ‘2
S к  ± ——————
± ——————
X1 + X ‘2
Во сколько раз уменьшится пусковой ток трехфазного асинхронного двигателя при соединении фаз в звезду вместо треугольника?
В  раз
раз
Выберите правильную упрощенную формулу электромагнитного момента асинхронной машины.
Мэм
= Рэм / 
Выберите правильную формулу для скольжения S.
S = (n1 – n) / n1
Выберите правильную формулу для частоты вращения магнитного потока статора.
n1 = 60 f / p
Почему пусковой момент асинхронного двигателя при введении реостата в фазный ротор увеличивается?
Увеличивается активное сопротивление ротора.
14 Почему номинальный момент асинхронного двигателя при введении реостата в фазный ротор уменьшается при том же скольжении?
+Уменьшается активная составляющая роторного тока
Что нужно сделать, чтобы изменить направление вращения трехфазного асинхронного двигателя с фазным ротором?
Поменять местами два линейных провода двигателя на клеммах трехфазной сети.
Выберите правильную формулу электромагнитной мощности асинхронной машины.
РЭМ = РЭЛ 2 / S
Почему электрическая машина называется асинхронной?
n1 ≠ n
Роторная обмотка короткозамкнутого ротора общепромышленного асинхронного двигателя может быть изготовлена из:
алюминиевого сплава.
Выберите правильную формулу электромагнитной мощности асинхронной машины.
РЭМ = m1 I122 R12 / S
Выберите правильную формулу полной механической мощности асинхронной машины.
РМХ= m1 I122 R12 (1-S) / S
Фазы ротора трехфазного асинхронного двигателя включают:
Звездой.
Выберите правильную формулу мощности на валу асинхронного двигателя.
Р2 = М2 2 n
/ 60
n
/ 60
Выберите правильную формулу для потребляемой активной мощности трехфазного асинхронного двигателя.
P1 = m1 U1 I1 cosϕ1
Какие условия необходимы для образования вращающегося кругового магнитного потока в двухфазном статоре асинхронного двигателя?
Равенство МДС фаз, пространственный сдвиг фаз на 120 электрических градусов, временной сдвиг токов фаз на 1/3 периода.
Какая величина называется перегрузочной способностью асинхронного двигателя?
λ = МК / МН
Сумма мощности потерь асинхронного двигателя ΣР составляет 50% от его полезной мощности Р2. Определить КПД асинхронного двигателя η.
η=67%.
27 Номинальная частота работы асинхронного двигателя с короткозамкнутым ротором, питающегося от промышленной сети переменного тока, n2=950 об/мин. Определить число пар полюсов p статорной обмотки данного двигателя и величину номинального скольжения Sн.
+p = 3, Sн= 0,05.
Асинхронный двигатель с числом пар полюсов р = 1, критическим скольжением Sк = 0,2 работает от промышленной сети переменного тока с нагрузкой на валу со скольжением S1 = 0,1. Определить частоту вращения ротора n2, если нагрузка на валу уменьшилась в 2 раза. Двигатель считать идеальным.
n2 = 2700 об/мин.
n2 = 5400 об/мин.
n2 = 2875 об/мин.
n2 = 3000 об/мин.
n2 = 125 об/мин.
Определить КПД η трехфазного асинхронного двигателя в номинальном режиме, если постоянные потери Р0=15мВт, переменные Рса=35 мВт, а потребляемая из сети мощность Р1=250 мВт.
η = 0,80
Три одинаковых асинхронных двигателя имеют различное номинальное скольжение: Sн1=0,08, Sн2=0,04 и Sн3=0,06. Определить в каком соотношении находятся их КПД η1, η2, η3.
η2 > η3 > η1.
Трехфазный асинхронный двигатель подключен к сети переменного тока с фазным напряжением U1 = 220 В. При номинальной нагрузке активная мощность, потребляемая двигателем из сети Р1 = 250 Вт, а фазный ток при этом равен I1 =0,5 А. Определить cosϕ двигателя при номинальной нагрузке.
.
cosϕ ≈ 0,76.
По каким внешним признакам можно определить асинхронный двигатель с фазным ротором?
На валу расположены три контактных кольца.
Чему равно скольжение двигателя при пуске?
Единице.
При каких условиях однофазный асинхронный двигатель имеет пусковой момент?
При наличии пространственного сдвига обмоток фазы и при наличии временного сдвига между токами обмоток.
С какой целью поверхность станины асинхронного двигателя может выполняться оребренной?
С целью обеспечения необходимой поверхности охлаждения.
В каком режиме работает асинхронная машина, если ее скольжение имеет отрицательное значение?
Генераторный.
Почему КПД двигателя всегда меньше 1?
Имеются активные потери мощности.
Какие потери в асинхронном двигателе называют переменными?
Электрические потери в статорной и роторной обмотках.
Почему магнитопровод статора двигателя выполняют из листовой электротехнической стали?
Пакет статора выполняют из листов электротехнической стали для уменьшения потерь на вихревые токи.
С какой целью в цепь обмотки фазного ротора вводят добавочное активное сопротивление?
Для уменьшения начального пускового тока и увеличения начального пускового момента.
Когда КПД двигателя становится максимальным?
Когда переменные потери становятся равными постоянным.
При каком скольжении будет максимальный момент двигателя?
При критическом скольжении.
Что представляет собой обмотка ротора асинхронного двигателя с короткозамкнутым ротором?
Обмотка ротора выполняется по типу беличьей клетки.
Какое магнитное поле создается при питании одной фазы переменным током?
Пульсирующее.
Назовите способы регулирования частоты вращения асинхронного двигателя с короткозамкнутым ротором?
Изменением числа полюсов обмотки статора, скольжения (изменением величины напряжения питания), частоты и напряжения питания.
.
Какие потери в асинхронном двигателе называют постоянными?
Сумма потерь в стали и механических.
Что понимают под режимом холостого хода двигателя?
Когда на валу отсутствует тормозной момент.
Что представляет собой обмотка ротора асинхронного двигателя с фазным ротором?
Роторная обмотка двигателя с фазным ротором выполняется трехфазной по типу статорной.
При каких условиях m-фазная обмотка создает вращающееся магнитное поле?
Любая m-фазная
обмотка создает вращающееся магнитное
поле, если сдвиг фаз в пространстве и
токов во времени составляет 2 /т.
/т.
Перечислите все способы пуска асинхронных двигателей.
Прямой; при пониженном напряжении; введением добавочного активного сопротивления в цепь ротора; введением добавочного активного сопротивления в цепь статора; частотный.
Что понимают под режимом короткого замыкания двигателя?
Работа при заторможенном роторе.
Чему равна частота тока в роторной обмотке, когда ротор заторможен?
Частоте тока обмотки статора.
Укажите схему включения обмоток асинхронного двигателя, если линейное напряжение в сети 220 В.
 / Y
/ Y
Укажите электротехнические материалы, применяемые в электрических машинах.
Проводниковые, магнитные, изоляционные, материалы щеток.
Какова классификация электрических машин по назначению?
Электромашинные генераторы, электрические двигатели, электромашинные преобразователи, электромашинные компенсаторы, электромашинные усилители, электромеханические преобразователи сигналов.
.
Какова классификация электрических машин по роду тока и принципу действия?
Трансформаторы, асинхронные машины, синхронные машины, коллекторные машины, машины постоянного тока.
Каков принцип создания вращающегося магнитного поля в асинхронных двигателях?
Распределение многофазных обмоток в пространстве, питание обмоток многофазными токами, имеющими сдвиг во времени.
Каковы способы регулирования частоты вращения асинхронных двигателей?
Частотный, изменением числа пар полюсов, изменением питающего напряжения, введением добавочных сопротивлений или ЭДС в цепь фазного ротора.
Как изменятся КПД и коэффициент мощности асинхронного двигателя при а) повышении напряжения б)понижении напряжения в сети?
а)
КПД и Cos  уменьшаются, б) КПД и Cos
уменьшаются, б) КПД и Cos  увеличиваются.
увеличиваются.
Как изменить направление вращения асинхронного двигателя?
Пересоединением к сети двух любых фаз обмотки статора.
Укажите формулы а)скольжения и б)частоты вращения асинхронного двигателя.
а) S = (n1 – n) / n1; б) n = 60 f1 / p.
Как и во сколько раз изменится вращающий момент асинхронного двигателя при переключении обмотки статора «со звезды на треугольник»?
Увеличится в 3 раза.
Определить число полюсов в обмотке статора асинхронного двигателя, если магнитное поле вращается со скоростью 1000 об/ мин.
2 р = 6.
Как изменится частота тока в роторе асинхронного двигателя при увеличении частоты вращения?
Уменьшится.
65 Какому из сопротивлений Rд1< Rд2< Rд3< Rд4 в двигателе с фазным ротором соответствует наименьший пусковой момент?
+МП при Rд1 в цепи фазного ротора.
.
Асинхронный двигатель называется асинхронным из-за несовпадения скоростей вращения:
ротора и магнитного поля статора;
Если номинальная частота вращения асинхронного двигателя nном = 1420 об/мин, то частота вращения магнитного поля составляет:
1500 об/мин;
Двигатель с фазным ротором отличается от двигателя с короткозамкнутым ротором:
наличием контактных колец и щеток;
Направление вращения магнитного поля асинхронного двигателя зависит от:
порядка чередования фаз обмотки статора;
Максимальная частота вращения магнитного поля асинхронного двигателя при промышленной частоте 50 Гц составляет:
3000 об/мин.
Для создания вращающегося магнитного поля асинхронного двигателя необходимы следующие условия:
пространственный сдвиг трех фаз обмотки статора и фазовый сдвиг переменных токов в них;
Механическая характеристика асинхронного двигателя имеет вид:
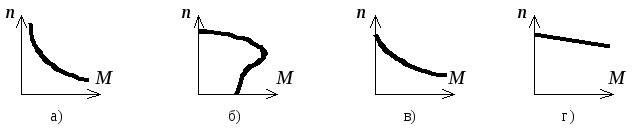
б)
Укажите неверное утверждение:
существует три основных типа вращающихся машин переменного тока: синхронные,
74 Для создания кругового вращающегося магнитного поля в двухполюсной машине переменного тока необходимо обеспечить пространственный сдвиг между осями обмоток (геометрических градусов) и фазовый сдвиг между токами обмоток (электрических градусов):
???на 120 геометрических градусов и 180 электрических градусов;
Если f – частота питающей сети (1/с), а p – число пар полюсов, то скорость вращения магнитного поля n1 (об/мин) определяется:

Если n1 – скорость вращения поля статора, а n2– скорость вращения ротора, то скольжение асинхронного двигателя s определяется:
 .
.
При работе асинхронной машины в режиме двигателя скольжение изменяется в пределах:
0…1;
При номинальном режиме работы асинхронного двигателя скольжение может составлять величину:
s = 0, 2…0,5;
Чему равна механическая мощность в асинхронном двигателе при неподвижном роторе (s = 1)?
Рмех = 0.
80 Перегрузочная способность асинхронного двигателя определяется как:
+отношение максимального момента к номинальному;.
Что является вращающейся частью в асинхронном двигателе?
Ротор.
В трёхфазную сеть с линейным напряжением 380 В включают трёхфазный двигатель, каждая из обмоток которого рассчитана на 220 В. Как следует соединить обмотки двигателя?
Звездой.
При регулировании частоты вращения магнитного поля n1 асинхронного двигателя были получены следующие величины: 1500; 1000; 750 об/мин. Каким способом осуществлялось регулирование частоты вращения?
.
Реостатное регулирование.
В каких единицах выражается реактивная мощность потребителей?
Вар.
Определить скольжение трехфазного асинхронного двигателя, если известно, что частота вращения ротора n отстает от частоты магнитного поля n1 на 50 об/ мин (n1=1000 об/ мин).
s = 0,05.
Укажите основной недостаток асинхронного двигателя.
Отсутствие дешевых и экономичных устройств для плавного регулирования частоты вращения ротора.
Частота вращения магнитного поля асинхронного двигателя n1=1500об/мин, частота вращения ротора n=1470об/мин. Определить скольжение s.
s = 0,02.
В симметричном трехфазном асинхронном двигателе линейное напряжение Uл = 220 В, линейный ток Ιл = 5А, коэффициент мощности cosφ = 0,8. Определить активную мощность.
Р = 1524 Вт.
С какой целью асинхронный двигатель с фазным ротором снабжают контактными кольцами и щетками?
Для соединения ротора с регулировочным реостатом.
Чему равен КПД асинхронного двигателя, работающего в режиме холостого хода?
0.
 90%.
90%.
 10%
10%
Для ответа на вопрос недостаточно данных.
Для преобразования какой энергии предназначены асинхронные двигатели?
Электрической энергии в механическую.
92 Как называется основная характеристика асинхронного двигателя?
+Механическая характеристика…
Как изменится ток в обмотке ротора асинхронного двигателя при увеличении механической нагрузки на валу?
Увеличится.
Как изменить направление вращения магнитного поля статора асинхронного трёхфазного двигателя?
Достаточно изменить порядок чередования двух фаз из трёх.
Определить частоту вращения магнитного поля ротора n2с асинхронного короткозамкнутого двигателя относительно магнитопровода статора, если число пар полюсов p = 1, частота изменения тока f1 = 50 Гц скольжение S = 0,02.
n2c = 3000 об/мин .
Определить частоту вращения магнитного поля ротора n2р асинхронного короткозамкнутого двигателя относительно магнитопровода ротора, если число пар полюсов p = 1, частота изменения тока f1 = 50 Гц, скольжение S = 0,02.
n2р = 3000 об/мин .
Электромагнитный момент асинхронного двигателя пропорционален…
напряжению обмотки статора в квадрате.
Режим работы электродвигателя, при котором скорость вращения вала равна нулю, и электрическая энергия, поступающая из сети, рассеивается в виде тепла в резисторной цепи называется
режимом короткого замыкания.
Укажите механическую характеристику асинхронного двигателя.
Mэм = f ( S ).
Скорость вращения магнитного поля статора 1500 об/мин, скольжение двигателя 5%. Определите скорость вращения вала ротора.
1425 об / мин.
Какое регулирование скорости вращения асинхронных двигателей позволяет получить скорость вращения выше номинальной?
Частотное.
При каком способе регулирования скорости вращения АД критический момент не изменяется?
При регулировании напряжением.
Укажите правильный ответ. Электротехническая сталь для изготовления сердечников современных асинхронных двигателей:
холоднокатаная анизотропная
Укажите неправильный ответ. Обмотка статора асинхронного двигателя может быть:
комбинированной
Укажите правильный ответ. Обмотки статора асинхронного двигателя соединены:
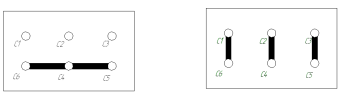
а б
а — треугольником; б – звездой
Укажите неправильный ответ. Скос пазов на роторе:
увеличивает ЭДС ротора
Укажите неправильный ответ. Асинхронный двигатель с фазным ротором имеет в конструкции:
пусковую обмотку
Укажите правильный ответ. Магнитный поток, созданный трехфазной обмоткой статора изменяется:
по направлению
Укажите правильный ответ. Скольжение S% асинхронного двигателя при частоте вращения магнитного поля n1=3000 об/мин и частоте вращения ротора n= 2940 об/мин:
2%
Укажите правильный ответ. Частота вращения ротора n (об/мин) при скольжении S= 5 %, числе пар полюсов р=2 и частоте питающей сети f1=50 Гц:
1425
Укажите правильный ответ. Скольжение асинхронного двигателя при увеличении нагрузки на валу:
увеличится
112 Укажите правильный ответ. Активное r2s и индуктивное Х2s сопротивления обмотки ротора при скольжении S=5%, если при неподвижном роторе r2= 1 Ом, Х2= 2 Ома:
r2s=0,05 Х2s=0,
113 Укажите правильный ответ. ЭДС в роторе асинхронного двигателя е2s при работе со скольжением S=4%, если при неподвижном роторе е2=20В:
+е2s= 0,8
Укажите правильный ответ. Частота тока в роторе f2 асинхронного двигателя при скольжении S=4% и частоте питающей сети f1= 50 Гц:
f2= 2 Гц
Укажите правильный ответ. Формула для частоты вращения ротора n асинхронного двигателя:
n=n1(1-S)
Укажите правильный ответ. Потребляемая двигателем мощность P1 Вт, при полезной P2= 400 Вт и КПД η=0,8:
500
Укажите правильный ответ. Электрические потери в обмотке ротора рэл Вт, если электромагнитная мощность P эм=700 Вт, скольжение S=4%:
28
Укажите правильный ответ. Скольжение двигателя S%, если электромагнитная мощность Pэм=500 Вт, а полная механическая мощность Рмх=470 Вт:
недостаточно данных для ответа
Укажите правильный ответ. КПД двигателя % при полезной мощности на валу Р2=350 Вт и суммарных потерях в двигателе Σр=150 Вт:
70
Укажите правильный ответ. Потребляемая из сети активная мощность P1 кВт по паспортным данным трехфазного асинхронного двигателя: статор Δ/Y – 220/380 В; I= 6,6/3,8 А; cosφ= 0,75:
1,08
1,88
3,26
5,6
Укажите правильный ответ. Вращающий момент асинхронного двигателя при увеличении подведенного напряжения в 2 раза:
увеличится в 4 раза
Укажите правильный ответ. Вращающий момент асинхронного двигателя при увеличении скольжения от 0 до 1:
сначала увеличивается, потом уменьшается
Укажите правильный ответ. Вращающий момент М Н·м асинхронного двигателя при полезной мощности P2= 5,8 кВт и частоте вращения ротора n=2900 об/мин:
19,1
Укажите правильный ответ. Величины, поддерживаемые постоянными при определении рабочих характеристик:
питающее напряжение и частота
Укажите правильный ответ. Ток холостого хода I0 и коэффициент мощности cosφ0 асинхронного двигателя при увеличении воздушного зазора:
I0 увеличивается, cosφ0 уменьшается
Укажите правильный ответ. Коэффициент мощности асинхронного двигателя cosφ c ростом нагрузки выше номинальной:
уменьшается
Укажите правильный ответ. Скольжение S и частота вращения ротора n при увеличении нагрузки на валу:
S – увеличивается, n – уменьшается
Укажите правильный ответ. Коэффициент мощности трехфазного асинхронного двигателя при полезной мощности P2= 40 кВт, фазном напряжении 220 В, фазном токе 78 А и КПД η= 0,89:
0,87
Определите правильный ответ. Кратность пускового момента:
отношение пускового момента к номинальному
Определите правильный ответ. Кратность пускового тока:
отношение пускового тока к номинальному
Определите правильный ответ. Диапазон кратности пускового момента для короткозамкнутых двигателей мощностью 0,6 — 100 кВт:
4,5 – 7,5
Определите правильный ответ. Изменение пускового момента при пуске переключением «звезда — треугольник»:
уменьшение
в  раз
раз
Определите правильный ответ. Изменение пускового момента при пуске с помощью автотрансформатора с коэффициентом трансформации к:
уменьшение в к2 раз
Определите правильный ответ. Снижение начального пускового тока в питающей сети при пуске переключением «звезда – треугольник»
в 3 раза
Определите правильный ответ. Изменение частоты тока частотного регулирования скорости при постоянстве мощности на валу двигателя и увеличение f1 в 1,73 раза
Определите правильный ответ. Изменение напряжения частотного регулирования скорости при вентиляторной нагрузке и уменьшении вдвое частоты вращения ротора
уменьшение U1 в 4 раза
Определите правильный ответ. Изменение напряжения частотного регулирования скорости при постоянстве момента на валу при увеличении в 1,73 раза частоты вращения ротора:
увеличение U1 в 1,73 раза
Изменение частоты вращения поля и максимального момента при переключении обмотки статора с треугольника на двойную звезду четырехполюсного двигателя:
n1 YY= 3000 об/мин; Мm YY= 0,575 Мm Δ
n1 YY= 3000 об/мин; Мm YY= Мm Δ/0,575
n1 YY= 750 об/мин; Мm YY= 0,575 Мm Δ
n1 YY= 750 об/мин; Мm YY= Мm Δ
Определите правильный ответ. Изменение частоты вращения поля и максимального момента при переключении обмотки статора с двойной звезды на одинарную звезду восьмиполюсного двигателя:
n1 Y= 1500 об/мин; Мm Y= Мm YY
n1 Y= 375 об/мин; Мm Y= 2Мm YY
n1 Y= 375 об/мин; Мm Y= Мm YY
n1 Y= 1500 об/мин; Мm Y= Мm YY/2
Укажите правильный ответ. Величина критического скольжения Sкр на графике М(S) асинхронного двигателя…
пропорционально R2’
Частота вращения магнитного поля асинхронного двигателя 1000 об/мин. Частота вращения ротора 950 об/мин. Определить скольжение.
0,05
Какой из способов регулирования частоты вращения ротора асинхронного двигателя самый экономичный?
Регулирование измерением числа пар полюсов
С какой целью при пуске в цепь обмотки фазного ротора асинхронного двигателя вводят дополнительное сопротивление?
Для получения максимального начального пускового момента.
Определите частоту вращения магнитного поля статора асинхронного короткозамкнутого двигателя, если число пар полюсов равна 1, а частота тока 50 Гц.
3000 об/мин
Как изменить направление вращения магнитного поля статора асинхронного трехфазного двигателя?
Достаточно изменить порядок чередования двух фаз из трёх
Какую максимальную частоту вращения имеет вращающееся магнитное поле асинхронного двигателя при частоте переменного тока 50 Гц?
3000 об/мин
Перегрузочная способность асинхронного двигателя определяется так:
Отношение максимального момента к номинальному
Чему равна механическая мощность в асинхронном двигателе при неподвижном роторе? (S=1)
P=0
Почему магнитопровод статора асинхронного двигателя набирают из изолированных листов электротехнической стали?
Для уменьшения потерь на вихревые токи