
Тонкости настройки преобразователя частоты | Техпривод
Любой частотный преобразователь имеет ряд настроек, позволяющих задать необходимый режим разгона и торможения электродвигателя. В статье мы расскажем, какими параметрами можно управлять и как их оптимизировать, чтобы избежать поломки оборудования.
Основные параметры разгона/торможения двигателя
Минимальная выходная частота. Параметр, определяющий значение частоты, при котором начинается вращение двигателя. Повышенная минимальная частота во многих случаях позволяет уменьшить нагрев двигателя при разгоне.
Нижний предел выходной частоты. Этот параметр ограничивает частоту на выходе преобразователя. Нижний предел не может быть меньше минимальной выходной частоты. Данная настройка необходима для обеспечения защиты двигателя и механизмов в случае ошибочной установки минимальной рабочей частоты.
Максимальная выходная частота. Параметр ограничивает выходную частоту сверху. Причем заданное (номинальное) значение частоты может быть меньше, либо равным максимальной выходной частоте. Данное значение используется для расчета теоретического времени разгона, а также привязывается к максимальному значению управляющих сигналов на аналоговых входах.
Частота максимального напряжения (номинальная частота двигателя). Этот параметр задается в соответствии со значением, указанным на шильдике электродвигателя. Как правило, оно равно 50 Гц. При такой частоте на двигателе действует максимально возможное для данного преобразователя напряжение. Если данный параметр выставить меньше необходимого, то двигатель будет работать с перегрузкой и никогда не разгонится до номинальной частоты.
Время разгона. Основной параметр, определяющий расчетное время, за которое электродвигатель разгонится от нулевой до максимальной выходной частоты. Темп нарастания, как правило, линейный, если не задано квадратичное изменение частоты. В случае, если нарастание задается в промежуточном диапазоне (не от нулевой и не до максимальной частоты), реальное время будет меньше заданного. Это обстоятельство нужно учитывать при проектировании оборудования.
Например, если минимальная выходная частота равна нулю, а максимальная – 50 Гц, то при установке времени разгона 10 сек и максимальной выходной частоте 25 Гц фактическое время разгона будет в 2 раза меньше, т.е. 5 сек. То же относится и к торможению.
Инерция нагрузки
На реальное время разгона и замедления также влияют различные механические и электрические параметры системы электропривода. Например, при установке очень малого времени разгона или торможения фактическое время может быть больше из-за инерции нагрузки на валу двигателя.
Инерция нагрузки при разгоне может привести к перегрузке по току, при этом преобразователь частоты выходит в ошибку. Чтобы такого не произошло, время разгона нужно выбирать по нескольким критериям. Если данный параметр не принципиален, можно выставить автоматический разгон. В этом случае преобразователь будет выбирать максимальный скоростной режим разгона или замедления, чтобы избежать ошибки перегрузки по току (разгон) или перенапряжению на звене постоянного тока (замедление).
Когда время торможения должно быть минимальным, применяют тормозные резисторы для выделения «лишней» энергии, полученной в результате торможения.
Дополнительная инерция при разгоне и торможении может проявляться также при аналоговом способе задания выходной частоты. Это происходит, когда на аналоговом входе устанавливается низкочастотный фильтр для уменьшения помех, либо в настройках выставлена большая инерционность задающего аналогового сигнала.
Производители рекомендуют ограничить число пусков/остановов двигателя в единицу времени, поскольку при разгоне и торможении происходит наибольшая тепловая нагрузка на частотный преобразователь.
Во многих ПЧ имеется несколько вариантов времени разгона и торможения, которые можно применить для различных этапов технологического процесса. Переключение производится посредством подачи сигнала на соответственно запрограммированный дискретный вход.
Параметры на примере преобразователя Prostar PR6100
В частотном преобразователе Prostar PR6100 параметры настройки разгона/торможения находятся в меню и имеют следующие обозначения:
- Р0.06 – верхний предел частоты
- Р0.07 – нижний предел частоты
- Р0.14 – время разгона
- Р0.15 – время торможения
- Р1.03 – номинальная частота двигателя
Другие полезные материалы:
Использование тормозных резисторов с ПЧ
Назначение сетевых и моторных дросселей
Настройка преобразователя частоты для работы на несколько двигателей
Назначение и виды энкодеров
Как настроить частотник. – своими руками Станок с ЧПУ
Предупреждение, как настроить частотник и не спалить шпиндель.
Настройка частотника xsy-at1. Для станка с ЧПУ я приобрёл инвертор чпу в комплекте с шпинделем. Потому что частотный преобразователь AT1-2200S рассчитанный на нагрузку 2,2 кВт. Поэтому я купил с запасом по мощности. Так как шпиндель станка будет мощностью 1,5 кВт. Как настроить частотник, читай ниже.
 Частотный преобразователь AT1-2200S
Частотный преобразователь AT1-2200S
 Шпиндель 1,5 кВт.
Шпиндель 1,5 кВт.После получения посылки, я решил сразу проверить исправность купленного оборудования.
Я конечно сразу подсоединил двигатель к частотнику. Но инструкцию конечно не читал. Так как инструкцию написали на английском языке, а я его не знаю. Но и как настроить частотник я тоже не знал.
 Частотный преобразователь и шпиндель.
Частотный преобразователь и шпиндель.
Потому что не читал инструкцию, всё соединил и включил сразу в розетку. Но не тут то- было. Потому что движок стоит. Но потом, когда я стал медленно крутить ручку по часовой стрелке, двигатель стал начинать вращение. И из него стал исходить скрипящий звук. Но звук похож на звук развалившегося подшипника, а не вращения двигателя. Так как всё это продолжалось в течении двух-трёх секунд, сработала защита частотника. Хвала за это Китайцу от чистого сердца. Когда пощупал я движок, то обомлел. Потому что за такое короткое время движок очень сильно нагрелся. Ну, думаю всё, конец шпинделю. Для того чтобы охладить двигатель я вынес его на улицу (зима). После чего пошёл в интернет разбираться как настроить частотник. Но когда я нашёл (долго искал) инструкцию на русском языке, тогда я всё понял.
После чего я сделал необходимые настройки. Но теперь у меня всё заработало. Потому что всё правильно я сделал. Так как ниже я привожу необходимые настройки для первого пуска и настройки инвертора шпинделя . Поэтому не сомневайтесь.
Настройка частотного преобразователя.
Сделаны настройки в частотном преобразователе XSY-AT1 T1-2200S
Приведены только настройки, которые необходимо сделать перед включением двигателя на 400Гц. Но для других моторов настройки будут другие. В приведённых таблицах вы можете посмотреть какие параметры возможно установить.
р 01-400 (50)
р 03-200 (25)
р 06-400 (50)
P 26-400 (50)
P 25-1 (00)
Р 26-рабочая частота, не рекомендуется ставить менее 100Гц. Потому что шпиндель будет греться. Но у меня стоит 400 и разницы в работе я не увидел.
Р 05-минимальная частота,если поставить скажем 100, то уже на 6000 шпиндель не будет вращаться вообще.Поэтому я поставил ноль (0)
Р 21- в таблице написано «коэффициент снижения»а снижения чего не ясно. Но я пробовал этот параметр и он влияет на мощность шпинделя при низких оборотах. Этот параметр я ставил от 11 до 20.
Возможно не лишним будет и сделать настройки по входному напряжению. Р 68 и Р 69 — нижний и верхний предел входного напряжения
Читаем дальше
В скобках я указал значения, которые установили на заводе по умолчанию. Так как без скобок это те значения, которые надо установить, будьте внимательны.
Так как я привожу только основные данные по частотному преобразователю.
Но назначение клемм частотного преобразователя XSY-AT1 T1-2200S отличается от других преобразователей.
xsy at1 2200s инструкция на русском языке
 Назначение клемм частотного преобразователя.
Назначение клемм частотного преобразователя.Назначение кнопок управления частотного преобразователя XSY-AT1 T1-2200S. Как настроить частотник.
 Настройка инвертора.
Настройка инвертора.Надо отметить, что частотный преобразователь может управлять работой не только двигателя на 400Гц. Так как основное его назначение, как я понял это работа с трёхфазными двигателями. Потому что эти установки стоят по умолчанию. Вот эти три фазы, напряжением 380 вольт я и подал на свой шпиндель. Но хвала всевышнему и Китайцу, за то что я ничего не попалил. Вы не повторите моих ошибок. Потому что ниже я приведу все основные настройки частотного преобразователя XSY-AT1 T1-2200S.
Так как использование кнопок управления частотного преобразователя XSY-AT1 T1-2200S требует внимания, то будьте бдительны. настройка частотника.
 Использование кнопок управления
Использование кнопок управленияПорядок ввода параметров.
- Нажать клавишу PROG для перехода в режим программирования.
- С помощью клавиш со стрелками и клавиши сдвига (SHIFT) выбрать
(по его номеру) параметр, значение которого надо изменить.
- Нажать кл. Func / DATA для доступа к числовому значению параметра.
- С помощью клавиш со стрелками и клавиши сдвига (SHIFT) изменить.
Значение выбранного параметра.
- Нажать кл. Func / DATA для сохранения значения параметра.
- Нажать клавишу PROG для выхода из режима программирования.
Код ошибки частотного преобразователя XSY-AT1 T1-2200S.
Err 1- Err 9
1 Сработала защита модуля IGBT (?)
2 Низкое напряжение питания (на входе) ПЧ
3 Перенапряжение по питанию (на входе) ПЧ
4 Неисправность в схеме управления
5 Пуск ПЧ при повышении напряжения на входе (каком?)
6 Сработала защита от перегрузки по току
7 Превышение времени (чего? )
8 Перегрев радиатора ПЧ
9 Внешняя неисправность
Но это не всё, ниже я приведу все параметры частотного преобразователя XSY-AT1 T1-2200S.
 Таблица 1 параметры Р 00 — Р 26
Таблица 1 параметры Р 00 — Р 26
 Параметр р 12 — р 26
Параметр р 12 — р 26 Параметры Р 27- Р47
Параметры Р 27- Р47 Параметры Р 48 — Р 55
Параметры Р 48 — Р 55 Параметр с Р 70 — Р 85
Параметр с Р 70 — Р 85 Параметр с Р 86 по Р 114
Параметр с Р 86 по Р 114 Параметры с Р 117 по Р 127
Параметры с Р 117 по Р 127На этом можно закончить. Но если у Вас остались вопросы, то пишите в комментариях. На все вопросы отвечу. Удачи в настройке.
Ликбез. Настройка преобразователя частоты. — Электропривод
На стр. 31-32 инструкци есть таблица с кратким перечнем всх доступных параметров, а ниже начинается их подробное описание. Но мы не будем строго следовать порядковым номерам т. к. логически это будет неправильно. Тем не менее, переберем их все. В этом сообщении перечисляются параметры 0, 1, 2, 4, 5, 25, 6, 7, 12, 13, 14, 15, 16, 17, 18, 22
Про параметр 0 написано «F_00 Factory adjustment parameter. Do not change.», что означает «Заводские подстройки. Не менять.» Значит туда не лезем.
Параметры 1 и 2 описаны в предыдущем сообщении.
Параметр 4 (Motor rotation direction) — направление вращения мотора. Значение может быть либо 0 либо 1. Сменив значение этого параметра на другое, можно изменить направление вращения двигателя, как если бы мы поменяли местами любые два провода, идущие к двигателю. Рекомендовал бы не пользоваться им. Лучше перекинуть провода и быть уверенным, что при замене частотника не забудете про этот параметр и двигатель сразу будет вращаться в нужную сторону. По умолчанию значение 0.
Параметр 5 (V/F Pattern) — можете порассматривать графики напряжение-частота на стр. 34. Есть по три варианта для двигателей с номинальной частотой 50 и 60 Гц. Суть сводится к тому, что можно немного форсировать напряжение на двигателе на низкой частоте или наоборот на высокой. Это довольно тонкие настройки и чаще всего заморачиваться на их счет не стоит. Оставьте значение по умолчанию для вашего двигателя (1 для 50 Гц или 4 для 60 Гц). Мой случай второй, поставим 4.
Кстати, здесь уместно немного метнуться к параметру 25 (Factory setting). Он отличается от всех остальных тем, что не сохраняет своего значения. Считав значение вы всегда увидите 000. Но если попытаться записать в него 010, то произойдет сброс всех параметров преобразователя частоты к заводским установкам для двигателя 50 Гц. А если записать 020, то тоже к заводским, но для двигателя 60 Гц. Это может быть полезно, если вы записали только те параметры, которые меняли. А потом «что-то произошло» и частотник перестал правильно работать. Чтобы не набирать все параметры, достаточно будет сбросить его к заводским установкам и потом изменить всего несколько.
Параметры 6 и 7 (Frequency upper/lower limit) — верхний и нижний предел выходной частоты соответственно. Что бы вы не делали, выходная частота никогда не будет выше ограничения, установленного в параметре 6. Значит если вы планируете разогнать двигатель выше номинальных оборотов, то в этот параметр нужно записать пропорционально большее значение по сравнению с номинальной частотой. Не рекомендовал бы разгонять больше, чем вдвое. Балансировка ротора делается для номинальных оборотов. На сильно более высоких почти наверняка возникнет вибрация и подшипникам не поздоровится. Во всяком случае, обратите на это внимание. В моем случае удвоенная частота это 120 Гц.
С нижней частотой чуть по-другому. Если вы попытаетесь задать частоту ниже, чем указано в параметре 7 (с клавиатуры или внешним потенциометром — не важно), но не нулевую, то двигатель будет продолжать вращаться со скоростью из параметра 7. И только когда зададите частоту 0 Гц преобразователь перестанет выдавать на двигатель что-либо. Вот такая петрушка. Но по умолчанию в этом параметре стоит 0. Так что просто не трогайте его, если нет какой-то специфической задачи.
Параметр 12 (Carrier frequency control) — Несущая частота ШИМ. В общем, вам не обязательно знать что это такое. Оставьте как есть. Имеет смысл изменять только если двигатель сильно пищит при работе на высокой частоте. Иногда изменение этого параметра может помочь с уровнем шума. По умолчанию стоит 5. При установке значений от 7 и выше — частотник не может выдать полную мощность. На других частотниках этот параметр может устанавливаться в других единицах! Подробности смотрите в инструкции!
Параметр 13 (Torque compensation) — это некоторая модификация к параметру 5. Позволяет дополнительно приподнять напряжение на двигателе на низких частотах. Есть очень выразительная картинка как он влияет на паттерн на верху стр. 37. По умолчанию значение 0. Вот так и оставьте. Этот параметр тоже относится к тонким настройкам, меняйте только при необходимости и разобравшись что делаете.
Параметр 14 (Stop method) — способ остановки двигателя. Есть два варианта — тормозить или отпустить. Во втором случае все просто. Частотник полностью отключается от двигателя по команде Стоп и дальше он крутится по инерции как хочет, пока не затормозится трением. А в первом случае торможение будет контролироваться частотником, причем в два этапа. Сначала частота будет уменьшаться до значения, указанного в параметре 16 (braking starting frequency) со скоростью, заданной параметром 2. А по достижении этой скорости через двигатель будет пропускаться постоянный ток , который будет тормозить двигатель дальше (уровень постоянного тока устанавливается параметром 17 (braking level) в пределах 0-20% от номинального тока двигателя) на протяжении времени, заданного параметром 15 (braking time). Вот такая история. В моем случае останавливаться двигателю конечно нужно быстро. Поэтому оставим все параметры по умолчанию. Это даст контролируемое торможение (параметр 14=0) вплоть до частоты 1,5 Гц (параметр 16=1,5) и потом торможение постоянным током 8% (параметр 17=8 ) в течение 0,5 секунды (параметр 15=0,5). Хороший компромисс между скоростью торможения и разогревом двигателя.
Параметр 18 (Motor rated current) — желательно просто указать номинальный ток двигателя в % от максимального выходного тока частотника. В моем случае это 0,9 А от 2,3 А т. е. 39%. Это значение тока используется частотником для защиты двигателя от перегрева. Позволяется в течение минуты поддерживать ток до 150% от номинального тока двигателя, потом частотник выдает ошибку и перестает мучить двигатель. Кстати, можно обратить внимание на эту цифру 150% и понять почему частотник лучше брать на мощность в 1,5-2 раза большую, чем ваш двигатель. И это не единственная причина, есть еще и разница при динамическом торможении, но об этом как-нибудь в другой раз. В данном конкретном частотнике защита даже пытается учесть, что на низких оборотах двигатель плохо охлаждается т. к. крыльчатка охлаждения сидит на его собственном валу, но я бы не доверял этому. Асинхронные двигатели, которые продолжительное время работают на малых оборотах, обязательно должны иметь принудительное охлаждение. Подробности на стр. 38 для самых любознательных.
Параметр 22 (Reverse Lock-Out) — еще один предохранительный параметр. Если его установить в 1, то частотнику будет жестко запрещено вращать двигатель в обратную сторону, даже если управляющие сигналы будут просить об этом. По умолчанию значение 0, мне нужно так и оставить, продольная подача пригодится в обе стороны.
Тут мы разобрали почти все «электрические» параметры. В следующем сообщении поговорим о настройке управляющих сигналов.
Подключение и настройка частотного преобразователя
Частотный преобразователь используется для изменения частоты напряжения, питающего трехфазный двигатель. Кроме того, частотник позволяет подключить трехфазный электрический двигатель к однофазной сети без потерь мощности. В случае, когда для этих целей применяются конденсаторы, последнее невыполнимо.
Подключение частотника предполагает размещение перед ним автоматического выключателя, работающего с током, равным номинальному (или ближайшему большему в ряду номинальных токов автоматов) потребляемому току двигателя. Если ПЧ адаптирован на работу от трехфазной сети, необходимо задействовать трехфазный автомат, имеющий общий рычаг. Такой подход позволяет в случае короткого замыкания одной из фаз оперативно обесточить и все остальные фазы. Характеристики тока срабатывания должны полностью соответствовать току одной фазы электрического двигателя. Если же частотник предназначен для однофазного питания, имеет смысл применить одинарный автомат, рассчитанный на утроенный ток одной фазы. В любом случае, установка частотника не должна осуществляется путем включения автоматов в разрыв нулевого или заземляющего провода. Здесь подключение выполняется только напрямую.
Далее настройка преобразователя частоты предусматривает присоединение его фазных проводов к соответствующим контактам электрического двигателя. Перед этим необходимо соединить в электродвигателе обмотки по схеме «треугольник» или «звезда». Конкретный тип соединения определяется характером напряжения, вырабатываемого непосредственно преобразователем частоты.
Как правило, на корпусе двигателя приведены два значения напряжения. В ситуации, когда вырабатываемому частотником напряжению соответствует меньшее из указанных, необходимо применить схему «треугольник». В противном случае обмотки соединяются по принципу «звезды».
Пульт управления, входящий в комплект поставки частотного преобразователя, располагают в удобном месте. Подключить его необходимо согласно схеме, приведенной в инструкции к ПЧ. Далее рукоятка устанавливается в нулевое положение и выполняется включение автомата. При этом на пульте загорается световой индикатор. Для работы преобразователя необходимо нажать кнопку «RUN» (запрограммировано по умолчанию). Затем необходимо немного повернуть рукоятку, чтобы электродвигатель начал постепенное вращение. В случае, если двигатель вращается в противоположную сторону, нажимается кнопка реверса. Далее следует настроить рукояткой необходимую частоту вращения. Важно учесть, что на пультах многих частотников отображается не частота вращения электрического двигателя (об/мин), а частота питающего электродвигатель напряжения, выраженная в герцах.
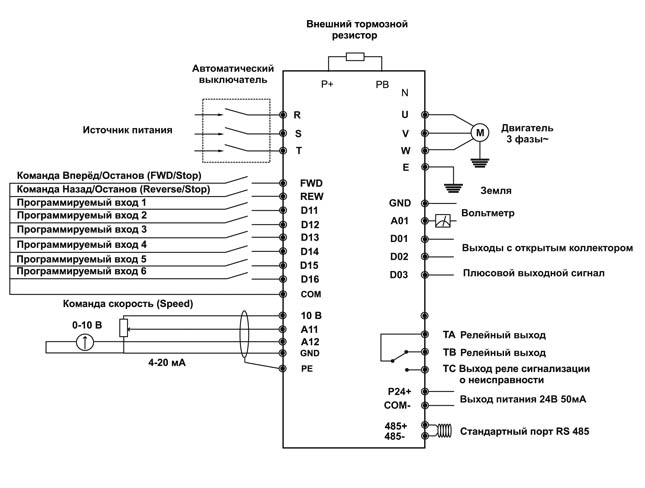
Схема подключения частотного преобразователя
Если у Вас остались вопросы по подключению и настройке преобразователей, обращайтесь за помощью к нашим техническим специалистам. Также предлагаем ознакомиться с каталогом частотных преобразователей Siemens и Prostar.
Другие полезные материалы:
Как правильно подобрать электродвигатель
Редуктор от «А» до «Я»
Как выбрать мотор-редуктор
Общие сведения об устройствах плавного пуска
Схемы подключения УПП
Программирование частотных преобразователей — настройка
Включение и создание программы преобразователя частоты обуславливает больше действий, чем обычное подключение кабелей по инструкции и схеме. Особым вопросом идет создание программ для входов частотников в 2017 году.
Дискретный вход бывает в двух наружных видах: соединен — разъединен. Подключением наружных разъединителей получается реализация разнообразных опций. Отдельным кнопкам назначается определенное значение частоты преобразователя частоты. Надо учитывать, обороты двигателя зависят от значений частоты выхода частотника. Если электромотор имеет скорость 1500 оборотов двигателя в минуту 50 герц, то, когда будет 25 герц, обороты станут 750 оборотов. Клавиши программируются для задания скорости, реверса, пуска. Такие процедуры производятся со всеми преобразователями, установив значения клавиш.
Простыми заходами бывают: от 0 до 10 вольт, 4-20 миллиампер. Входы бывают соединенными и разделенными. Во время изменения потенциала входа изменяется частота выхода преобразователя. Вход от 4 до 20 миллиампер применяют для подсоединения многих датчиков в техпроцессе.
Дискретные выходные данные характеризуются двумя положениями. Их разделяют два вида: с контактом сухого вида и с коллектором открытого вида. Выходы задаются для проведения большого числа опций: работа над частью помп, коммутация питания, оповещательного положения.
Для создания программ частотника с выхода компьютера в 2017 году используются новые виды программ. Процедуры программиста видны на дисплее. Можно быстро найти ошибку в создании текста программы, оперативно изменить, сделать правильными действия. Сообщения во время создания программы появляются на экране для программиста. Эта опция доступна многим частотникам.
Многие изготовители частотников добиваются того, чтобы создание программ для оборудования осуществляли квалифицированные специалисты, которые учитывали бы условия применения механизмов, задачи, задающиеся от покупателей производственных двигателя и заказчики частотников.
Настройка, создание программы и установка преобразователя
Настройка механизма
Эта процедура включает в себя настройки значений:
- Источник команд управления.
- Команда задания частоты от источника.
Другие настройки даны в подробном описании к документам на частотный преобразователь.
Настройка: источник команд управления
Под этими командами считают:
- Пуск (RUN).
- Стоп (STOP).
- Вперед (FWD).
- Назад (REV).
Управляющие данные из источников (по настройкам значения 2.01):
- 2.01= 0 – Панель управляющая в корпусе (клавиатура) частотника (по умолчанию).
- 2.01= 1 — Наружные сигналы, имеющие разрешение встроенной кнопки «STOP».
- 2.01= 2 — Наружные сигналы, запрещающие встроенной кнопки «STOP».
- 2.01= 3 – Вид программы передающих RS-485, разрешающий кнопки «STOP».
- 2.01= 4 – Вид программы передающих RS-485, запрещающий кнопки «STOP».
У многих видов частотников имеются источники команд, переключающиеся по программируемому дискретному входу. В серии VFD-VE источник команд управления изменяется клавишей PU, у серии VFD-C2000 клавишей HAND на встроенной панели управления.
Для первоначальной настройки нужно определить основной источник сообщения управляющих команд. Если это будет встроенная управляющая панель, то настройка закончена.
Для подсоединения наружных сигналов сообщения можно выбирать два варианта: активная или неактивная клавиша STOP на панели.
Как подсоединить управляющие сигналы (клавиши, выключатели, клеммы)?
Рабочим сигнальным положением является Земля. Когда мы включаем Землю на дискретный вход, то команда активируется. Это контакты, подсоединяем ее выключателю, клеммы наружных реле, клавиши с фиксированием в 2-проводном управлении, или обычные клавиши без фиксирования в трехпроводном управлении.
Бывает нужно иметь уровень активности управляющего сигнала, который закреплен не к Земле, а к положительной клемме питания двигателя, для активирования команды можно не нулем, а уровнем команды логики. Это получается перестраиванием режимов при помощи сообщения переключателя малого размера, который встроен в управляющую плату частотника. Расположение микропереключателя выясняется в документации к частотнику. Сигнал Sink говорит нам, что сигналом активности выходит Земля, а сигнал Source, что положительная клемма сети. У всех видов частотников имеется встроенный источник напряжения задания управляющих команд входами, с контактами.
Всякая коммутация может происходить только при отсоединенном двигателе напряжении питания сети 220в частотника.
Подключение наружных клавишей для управления:
Управление с двумя проводами SINK.
Управление с тремя проводами SINK.
У некоторых видов преобразователей с 2016 года название контактов управления для команд изменены. Уточненную схему подсоединения для вариантов с двумя или тремя проводами частотника можно увидеть в документации к оборудованию.
Остается сделать настройку при определении управляющих команд двигателя сообщения: указать частотнику вид схемы для управления мы будем коммутировать.
В частотниках VFD-EL или VFD-Е настраиваются значения 04.04. — выбираем 2-х или 3-х проводную схему управления для входов MI1, MI2. Его параметры следующие:
- 04. 04 = 0 2-х проводная схема: FWD/STOP, REV/STOP (заводские режимы настройки).
- 04. 04 = 1 2-х проводная схема: FWD/REV, RUN/STOP.
- 04. 04 = 2 3-х проводная схема: (кнопки RUN и STOP без фиксирования).
Для VFD-G, VFD-F, VFD-B за настройку отвечает значение 2.05 в конце кода с такими же параметрами.
VFD-C2000 – за опцию значение 2.00 с теми же параметрами.
VFD-VE – настраивается значение 2.00 в конце кода, его величина другая, добавлены виды с блокированием автоматического старта.
Во время настраивания выполните сначала физические подсоединения (при выключенном напряжении сети 220в), затем можно производить режим настройки значений. Можно производить эти манипуляции в обратной последовательности. Не надо забывать про безопасные приемы, какие действия произойдут после пуска.
Настраивание источника задания частоты выхода
Подача команды определения частоты пройдет от многих источников. Варианты подключения определяются параметром Pr 02-00 (источник определения частоты выхода), или Pr 00-20.
Размер параметра может разниться в разных видах серий, так как многие серии обладают потенциометром, определяют сигналы импульсов частоты задания. Параметры описаны в документации. Задания частоты на панели сообщения бывают:
- Клавишами с управляющей панели для всех видов.
- С наружных терминалов, клавишами.
- С потенциометра в панели.
- С наружного потенциометра или сигнала аналогового типа для всех.
- С интерфейса цифрового вида RS-485.
- Сигналами импульсов с без направленности или по направлению.
- Интерфейсными командами CAN open.
Задания частоты наружным прибором
При применении вида определения частоты наружным прибором надо включать его по схеме ниже.
Рекомендовано потенциометр сопротивлением не ниже 5 килоом. Номинальное значение измерителя задается из требований не увеличивать нагрузку питающего источника в частотнике +10 вольт – составляет наибольшее значение 20 миллиампер и меньше.
Потенциометр подсоединяется между контактами +10 вольт и АСМ, значение сигнала от него подсоединяется к AVI.
Схемы потенциометров и разных параметров сообщения задания у преобразователей отличаются.
Программирование значений параметров частотников с панели управления
Опишем схему эксплуатации. После нажатия PROG (ENTER) выводится на дисплей размер параметров группы. Клавишами вниз-вверх изменяем группу на необходимую. Нажмем клавишу PROG – появится значение номера параметра. Проводим изменение на необходимый клавишами вниз-вверх или уходим назад на группу значений клавишей MODE.
Сохраняем выбор значения параметра, на дисплее выводится значение результата параметра. Изменяем параметр на значение необходимое клавишами вниз-вверх, сохраняем.
Если механизм привода задан своим значением, то на малое время будет появляться запись End. Если есть неисправность, то будет Err, надо решать, где ошибка, неправильное значение. Некоторые значения параметра программируются только на заторможенном приводе.
Порядок действий по первому включению частотного преобразователя
- Контроль совпадение частотника значениям сети напряжения и мотора.
- Контроль подсоединения к сети и мотору.
- Начало первому включению, сброс значений параметров для 50 герц.
- Настраивание источника управляющих команд механизмом.
- Программирование частотного задания.
- Разные настройки.
Нельзя пренебрегать штудированием документации технического характера. В ней есть ответы на многие вопросы.
Создание программ для преобразователей Mitsubishi & Danfoss, Siemens, посредством RS485
Записать значения параметров на панели оператора. Определим по Сименсу. Приобрели частотник с двумя режимами USB порта. Включили Драйв Монитор, появилась связь.
По Мицубиши: скачал в сети Интернета множество разной информации. Произвел запуск установки программ. Какая из программ нужна, не понятно. Это слишком сложно получилось.
У Сименса не все получается просто. Есть своеобразный адаптер для создания программ. Подсоединяется в колодку пульта. Можно обмениваться с наружными механизмами. Без драйверов не будет определяться и запускаться. Нужно смотреть на полюсы подсоединения. Подключаем сразу по записям, не работает. Изменили полюсность – стало действовать.
Программы настраивания действуют на устройстве, а не на COM порте. Если программа не начнет действовать, то запустите диспетчер и устройства, имеется или нет адаптер, какой у него вид, его опознание с драйверами.
Способы управления частотным преобразователем | Техпривод
Существует несколько способов управления частотным преобразователем. В процессе работы ПЧ происходит оперативный контроль следующих функций:
Пуск – Останов (Старт – Стоп). Управление началом вращения и торможением подключенного двигателя.
Установка скорости. Настройка рабочей скорости привода.
Аварийный останов. Аварийное снятие силового питания, сигнал разрешения работы.
Эти изменения в работе ПЧ производятся путем подачи сигналов с внешних устройств либо с панели управления. Остальными параметрами можно управлять исключительно с панели управления, причем некоторые из них активны только при выключенном двигателе.
Способы управления могут быть следующими:
- управление с помощью клавиатуры (панели управления) частотного преобразователя
- управление с помощью пульта ДУ
- аналоговый вход (изменение текущей скорости вращения двигателя)
- дискретные входы (изменение различных состояний и параметров преобразователя)
- последовательный интерфейс RS-485 либо его аналог
Рассмотрим управление преобразователем на примере ПЧ Prostar PR6000.
Управление с помощью пульта ДУ
В отличие от панели управления пульт может иметь кабель длиной до 500 м, по которому передаются сигналы последовательного интерфейса.
Пульт управления имеет клавиши RUN (Пуск), STOP/RESET (Стоп/Сброс), JOG (работа в импульсном или толчковом режиме). Также можно сбрасывать ошибки, менять значение частоты и направление вращения двигателя, изменять прочие параметры.
Управление через аналоговый вход
В преобразователе частоты PR6000 имеется два аналоговых входа – AI1 и AI2. Это выгодно отличает его от других моделей с одним аналоговым входом.

Вход AI1 может использоваться для управления по напряжению с входным сопротивлением 47 кОм. Вход AI2 имеет выбор, который производится переключателем: токовый вход с входным сопротивлением 500 Ом, или вход по напряжению.
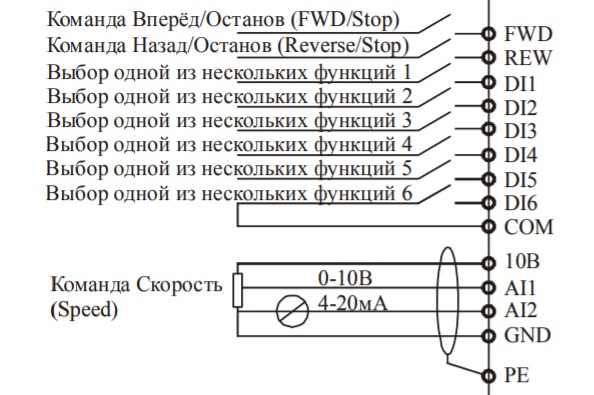
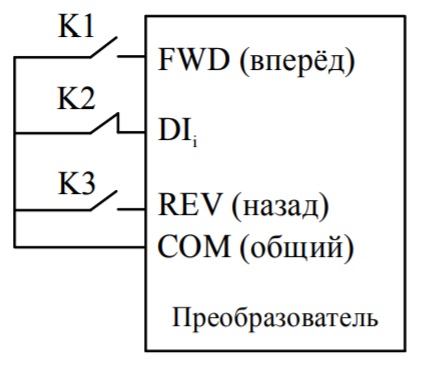
Управление через дискретные входы
У преобразователя PR6000 имеется 8 дискретных (цифровых) входов: FWD (вперед/стоп), REW (назад/стоп) и 6 входов DI1…DI6.
Входы FWD и REW могут работать в двух- и трехпроводном режиме, при этом третий провод программируется на одном из входов DI1…DI6. Выбор режима управления скоростью устанавливается в параметре Р077.
Дискретные входы DI1…DI6 являются многофункциональными, они программируются на разные функции, которые запускаются при активации соответствующего входа.
Набор возможных функций: выбор многоскоростного режима, выбор разгона/замедления, включение вращения в режиме JOG вперед/назад, управление остановом, увеличение/уменьшение частоты, вход сигнализации неисправности (аварии), пауза при пуске, трехпроводное управление пуском/стопом, торможение постоянным током, сброс ошибки/сообщения, работа по качающейся частоте, включение/сброс/вход счетчика. Всего можно выбрать до 20 различных параметров, которые устанавливаются в параметрах Р071…Р076 для каждого входа. Активация дискретных входов происходит путем замыкания нужного входа на клемму СОМ. Причем, это может производиться разными способами — выходом контроллера, контактами реле, датчика или ручной кнопки. Дискретные и аналоговые входы показаны ниже.
Управление через последовательный интерфейс
При работе через интерфейс RS-485 преобразователь частоты управляется контроллером либо персональным компьютером через специальный адаптер-преобразователь RS-485/RS-232.
Через этот интерфейс преобразователь может не только принимать команды на изменения параметров и состояния, но и выдавать информацию о своем текущем состоянии на другие устройства. Также по интерфейсу RS-485 может поддерживаться связь с другими преобразователями.
Далее поговорим о способах оперативного управления режимами ПЧ.
Старт/Стоп двигателя
Запуск и останов двигателя может производиться следующими способами.
- С панели управления преобразователя частоты. Для этого используются кнопки RUN, STOP/RESET. Если нужен кратковременный запуск, используется кнопка JOG.
- Подачей сигнала на дискретные входы FWD, REW при двухпроводном управлении. Для трехпроводного управления нужно задействовать один из дискретных входов DI1…DI6 и запрограммировать его соответствующим образом. Режим выбирается параметром Р077. Любой из этих входов можно также использовать для импульсного запуска (команда JOG). При двухпроводном управлении для работы двигателя необходим постоянный сигнал на соответствующих входах. При трехпроводном достаточно кратковременного сигнала.
- Через последовательный интерфейс командами с контроллера. Выбор источника команды Старт/Стоп в ПЧ Prostar PR6000 производится в параметре Р006.
Двухпроводное управление пуском/остановом
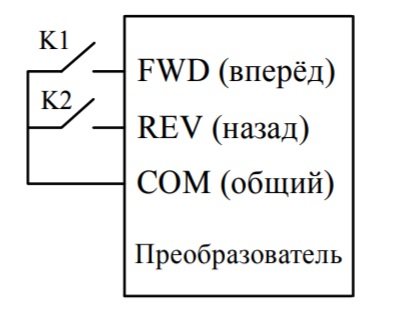
Трехпроводное управление пуском/остановом
Управление частотой
ПЧ может управлять скоростью несколькими способами в зависимости от конкретного оборудования.
- Управление скоростью при помощи переменного резистора, установленного на клавиатуре (панели управления) ПЧ.
- Дискретное изменение при помощи клавиш панели управления Вверх/Вниз.
- Дискретное изменение при помощи контактов (любых двух), подключенных ко входам DI1…DI6. При активации соответствующего дискретного входа происходит уменьшение либо увеличение скорости в заданных пределах с заданным шагом.
Примечание. В вариантах 2 и 3 при включении питания двигатель запускается на частоту, установленную в параметре Р005. В процессе работы частоту можно оперативно изменять. Если измененное значение частоты необходимо запомнить, используется параметр Р155. - Задание скорости при помощи аналоговых сигналов напряжения или тока, поступающих на входы AI1, AI2. Аналоговые сигналы могут комбинироваться в разных вариантах.
- Задание в соответствии с частотой импульсов на входе DI6.
- Через интерфейс RS-485 от контроллера. Выбор канала управления частотой осуществляется параметром Р004. Верхняя и нижняя рабочие частоты устанавливаются в параметрах Р009 и Р010. Скорость работы двигателя в импульсном (толчковом) режиме JOG задается параметром Р052.
Аварийный останов ПЧ
Кроме штатного останова функцией Стоп с заданным замедлением используются два способа экстренного останова двигателя и отключения ПЧ.
- Аварийный останов прерыванием питания. Для этого производители рекомендуют перед силовым питанием ПЧ устанавливать трехфазный линейный контактор, питание катушки которого зависит от состояния аварийной цепи всего оборудования. При нажатии на кнопку «Аварийный останов» или другом экстренном случае питание контактора отключается, и напряжение с ПЧ снимается. Таким образом двигатель гарантированно остановится.
- Используется функция дискретного входа DI1…DI6 «Сигнализация неисправности внешнего устройства». Если запрограммировать нужный вход на эту функцию, в случае подачи на него аварийного сигнала преобразователь остановится.
Другие полезные материалы:
Тонкости настройки преобразователя частоты
FAQ по электродвигателям
Настройка преобразователя частоты для работы на несколько двигателей
Назначение и виды энкодеров
Настройка ПЧ для работы с несколькими электродвигателями
В большинстве преобразователей частоты реализована функция работы с несколькими электродвигателями, при этом возможны три варианта подключения.
- Два двигателя имеют одинаковую мощность и подключены параллельно.
- Два двигателя имеют разную мощность и могут работать на разную нагрузку. В этом случае каждый из двигателей необходимо подключать через свое тепловое реле. Значения тока реле нужно выставить в соответствии с мощностью двигателей.
- Поочередная работа двигателей. Приводы могут иметь разную мощность, работать на разные нагрузки и выполнять разные задачи. Принципиально важно, что работают они с разнесением во времени, например, на разных технологических процессах. Переключение происходит с помощью контакторов.
Рассмотрим эти варианты подробнее.
К преобразователю частоты одновременно подключены два одинаковых двигателя
Если двигатели одинаковы, их обмотки могут быть подключены параллельно. При этом преобразователь частоты должен работать в скалярном режиме (без обратной связи). Мощность ПЧ должна быть равна или превышать сумму мощностей электродвигателей.
Если двигатели работают на общий вал, необходимо предусмотреть возможность плавного фазирования. При первом включении подстраивается взаимное положение роторов с помощью муфты скольжения, после чего муфта зажимается. Затем проверяются токи каждого двигателя — они должны быть одинаковыми.
Для лучшей защиты желательно на выходе ПЧ перед каждым двигателем установить тепловое реле (РТЛ), контакты которого подключить к аварийному или стоповому входу преобразователя. Мотор-автомат вместо РТЛ устанавливать нельзя, поскольку преобразователи частоты не любят коммутацию на выходе в процессе работы.
Параметры разгона, торможения, защиты и проч. будут одинаковыми для обоих двигателей.
К преобразователю частоты одновременно подключены два разных двигателя
В данном случае справедливо всё, что описано выше, однако требования к защите двигателей ужесточаются. Обязательно нужно устанавливать тепловое реле, поскольку настройками ПЧ защитить двигатель с меньшей мощностью не удастся. Важно, чтобы другие важные параметры приводов (количество полюсов, скорость вращения, напряжение, схема включения обмоток) совпадали.
Коммутация двигателей на выходе преобразователя частоты в процессе работы не допускается.
К преобразователю частоты подключены два двигателя поочередно
Тут возможны два случая – подключение двигателей к ПЧ предусмотрено производителем или не предусмотрено.
Если в бюджетном преобразователе переключение между двигателями не предусмотрено, то, как правило, есть возможность переключаться между параметрами разгона и замедления. Это может быть сделано автоматически, с использованием запрограммированного входа ПЧ. Параметры двигателя и его защиты не меняются, поэтому допускается эксплуатация только одинаковых двигателей. Переключение производится в режиме «Останов», для чего в схеме должны быть предусмотрены специальные блокировки.
Для переключения используются контакторы, либо переключатели. Возможна ситуация, когда при пропадании питания на установке и номинальной мощности на выходе ПЧ контакторы отключаются раньше, чем отключится выход преобразователя . В этом случае преобразователь может выйти из строя. Чтобы подобного не произошло, необходимо установить нужный режим ПЧ при пропадании питания, либо использовать частотник, рассчитанный на применение коммутации на выходе.
Если производителем частотного преобразователя предусмотрено подключение двух двигателей, то всё необходимое для этого предусмотрено в программном и аппаратном обеспечении преобразователя. Для каждого двигателя имеется свой профайл (набор параметров), который используется при выборе данного привода. Обычно также есть специальные выходы и входы, которые контролируют переключение выхода преобразователя с одного двигателя на другой. Это наиболее предпочтительный режим, поскольку приводы и частотник работают корректно, в штатных режимах, и полностью защищены.
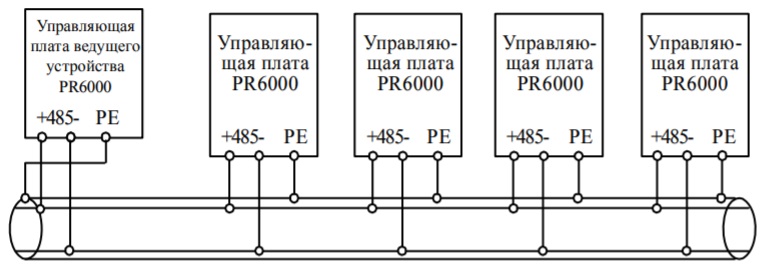
Перечисленные варианты можно применить для трех и более электродвигателей при соблюдении указанных условий. В общем виде схема может выглядеть так:
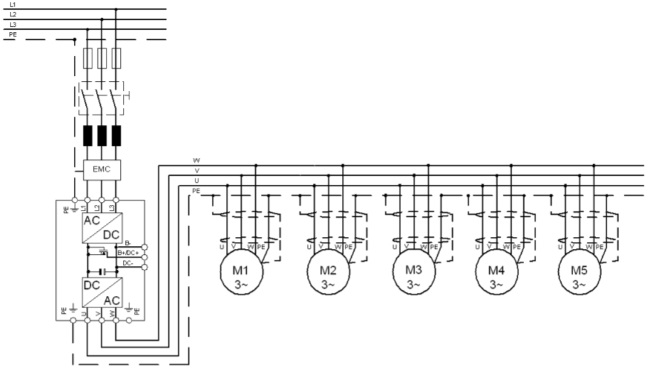
В завершение отметим, что для реализации конкретной задачи необходимо внимательно изучить инструкцию к конкретной модели преобразователя.
Другие полезные материалы:
Редуктор от «А» до «Я»
Назначение сетевых и моторных дросселей
Обзор устройств плавного пуска Siemens
Использование тормозных резисторов с ПЧ
Сравнение плавного пуска и пуска двигателя с преобразователем частоты
Плавный пуск
Устройство плавного пуска — это, как и следовало ожидать, устройство, обеспечивающее плавный пуск двигателя . Устройство плавного пуска имеет характеристики, отличные от других методов пуска. Он имеет тиристоров в главной цепи, а напряжение двигателя регулируется с помощью печатной платы.
 Сравнение плавного пуска и пуска двигателя с преобразователем частоты (на фото: частотно-регулируемые приводы, установленные на двигателях вентиляторов и насосов; кредит: crockett-services.ком)
Сравнение плавного пуска и пуска двигателя с преобразователем частоты (на фото: частотно-регулируемые приводы, установленные на двигателях вентиляторов и насосов; кредит: crockett-services.ком)Устройство плавного пуска использует тот факт, что , когда напряжение двигателя низкое во время пуска, пусковой ток и пусковой момент также низкие. .
 Устройство плавного пуска двигателя
Устройство плавного пуска двигателяПреимущества
Устройства плавного пуска основаны на полупроводниках . Эти полупроводники через силовую цепь и цепь управления снижают начальное напряжение двигателя.
Это приводит к более низкому крутящему моменту двигателя .
Во время процесса пуска устройство плавного пуска постепенно увеличивает напряжение двигателя, тем самым позволяя двигателю разгонять нагрузку до номинальной скорости , не вызывая высокого крутящего момента или пиков тока .
 Кривая плавного пуска — Синхронная скорость — Момент полной нагрузки (слева) и ток полной нагрузки (справа)
Устройства плавного пуска
Кривая плавного пуска — Синхронная скорость — Момент полной нагрузки (слева) и ток полной нагрузки (справа)
Устройства плавного пускатакже можно использовать для управления остановкой процессов. Устройства плавного пуска менее дороги, чем преобразователи частоты.
Еще одной особенностью устройства плавного пуска является функция плавного пуска , которая очень полезна при остановке насосов, когда проблема заключается в гидроударах в системе трубопроводов при прямом останове, как в пускателях со звезды на треугольник и пускателях прямого пуска.
Недостатки
Однако они имеют ту же проблему, что и преобразователи частоты: они могут вводить в систему гармонических токов , и это может нарушить другие процессы. (Подробнее об этом)
 Наклон напряжения для устройства плавного пуска. Время разгона составляет около 1 секунды.
Наклон напряжения для устройства плавного пуска. Время разгона составляет около 1 секунды.Метод пуска также обеспечивает пониженное напряжение на двигателе во время пуска.
Устройство плавного пуска запускает двигатель при пониженном напряжении , а затем напряжение увеличивается до полного значения .Напряжение в устройстве плавного пуска снижается через фазовый угол. В связи с этим методом пуска не будут возникать импульсы тока. Можно установить время разгона и ток заторможенного ротора (пусковой ток).
Электродвигатель Soft Start 60HP (ВИДЕО)
Часть 1
Часть 2
Пуск преобразователя частоты
Преобразователи частотыпредназначены для непрерывного питания двигателей , но они также могут использоваться для запуска только .
Преобразователь частоты иногда также называют VSD (частотно-регулируемый привод), , VFD (частотно-регулируемый привод) или просто приводы , что, вероятно, является наиболее распространенным названием.
Привод состоит в основном из двух частей: одна преобразует переменный ток (50 или 60 Гц) в постоянный ток, а вторая часть преобразует постоянный ток обратно в переменный, но теперь с переменной частотой 0–250 Гц. Поскольку скорость двигателя зависит от частоты, это позволяет управлять скоростью двигателя, изменяя выходную частоту от привода, и это большое преимущество, если есть необходимость в регулировании скорости во время непрерывной работы.
Как указано выше, во многих приложениях привод по-прежнему используется только для пуска и остановки двигателя, несмотря на то, что нет необходимости в регулировании скорости во время нормальной работы. Конечно, это создаст потребность в гораздо более дорогом стартовом оборудовании, чем необходимо.
Путем регулирования частоты номинальный крутящий момент двигателя доступен на низкой скорости, а пусковой ток низкий, от 0,5 до 1,0 номинального тока двигателя, максимум 1,5 x In .
Еще одна доступная функция — softstop , которая очень полезна, например, при остановке насосов, когда проблема заключается в гидроударах в трубопроводных системах при прямой остановке. Функция softstop также полезна при остановке конвейерных лент от транспортировки хрупких материалов, которые могут быть повреждены, если ленты остановятся слишком быстро.
Очень часто вместе с приводом устанавливают фильтр , чтобы снизить уровень излучения и генерируемых гармоник.
 Преобразователь частоты и его линейная схема
Преобразователь частоты и его линейная схемаПреимущества
Преобразователь частоты позволяет использовать низкий пусковой ток , поскольку двигатель может создавать номинальный крутящий момент при номинальном токе от нуля до полной скорости. Преобразователи частоты все время дешевеют.
В результате они все чаще используются в приложениях, где раньше использовались устройства плавного пуска.
 Кривая преобразователя частоты — Синхронная скорость — Момент полной нагрузки (слева) и ток полной нагрузки (справа)
Кривая преобразователя частоты — Синхронная скорость — Момент полной нагрузки (слева) и ток полной нагрузки (справа)Недостатки
Даже в этом случае преобразователи частоты в большинстве случаев все еще на дороже устройств плавного пуска ; и, как и устройства плавного пуска, они также вводят в сеть гармонические токи.
Что такое диск? (ВИДЕО)
Приводы VLT на большой опреснительной установке (ВИДЕО)
Приводы VLT управляют вентиляторами градирни (ВИДЕО)
Артикул:
,Подбор двигателей и преобразователей частоты для конкретной нагрузки машины
Правильный размер двигателей и преобразователей
Производители электродвигателей и преобразователей частоты разработали различные методы для быстрого выбора размера двигателей и преобразователей частоты для конкретной нагрузки машины. Та же самая основная процедура используется большинством разработчиков приложений.
 Расчет двигателя и преобразователя частоты для конкретной нагрузки машины (фото: focusondrives.ком)
Расчет двигателя и преобразователя частоты для конкретной нагрузки машины (фото: focusondrives.ком)В наши дни выбор приложений обычно выполняется на основе программного обеспечения на ПК. Однако инженерам важно четко понимать процедуру выбора.
Одна из лучших процедур использует простую номограмму , основанную на кривых предельной нагрузки , чтобы сделать основной выбор размера двигателя. Эта процедура описана ниже. Затем проверяются другие факторы, чтобы убедиться, что выбрана оптимальная комбинация двигателя и преобразователя.
4 принципа выбора
Рекомендуются пять следующих принципов выбора:
Принцип выбора 1 //
Сначала необходимо выбрать тип и размер двигателя. Число полюсов (базовая скорость) следует выбирать так, чтобы двигатель работал как можно дольше со скоростью, немного превышающей базовую скорость в 50 Гц.
Это желательно, потому что:
- Тепловая мощность двигателя повышается при f ≥ 50 Гц за счет более эффективного охлаждения при более высоких скоростях.
- Коммутационные потери преобразователя минимальны при работе в диапазоне ослабления поля выше 50 Гц.
- Для нагрузки с постоянным крутящим моментом больший диапазон скоростей получается, когда двигатель хорошо работает в диапазоне ослабления поля на максимальной скорости.Это означает, что наиболее эффективное использование крутящего момента / скорости привода с регулируемой скоростью.
 Типичные кривые крутящего момента и мощности в приложении с постоянной мощностью / крутящим моментом
Типичные кривые крутящего момента и мощности в приложении с постоянной мощностью / крутящим моментом
Это может означать экономию за счет меньшего двигателя и преобразователя . - Хотя многие производители заявляют, что их преобразователи могут выдавать выходные частоты до 400 Гц, эти высокие частоты практически не используются, за исключением очень специальных (и необычных) приложений.Конструкция двигателей со стандартным сепаратором и снижение максимального крутящего момента в зоне ослабления поля ограничивают их использование на частотах выше 100 Гц.
Максимальную скорость, на которой может работать стандартный двигатель с короткозамкнутым ротором, всегда следует уточнять у производителя, особенно для более крупных 2-полюсных (3000 об / м) двигателей мощностью более 200 кВт. Шум вентилятора, производимый двигателем, также существенно возрастает с увеличением скорости двигателя.
- Сравнение крутящего момента, создаваемого 4-полюсным двигателем и 6-полюсным электродвигателем , показано на рисунке 1.Это иллюстрирует более высокий крутящий момент 6-полюсной машины.
 Рисунок 1 — Сравнение предельных кривых тепловой мощности для двух двигателей с короткозамкнутым ротором 90 кВт TEFC
Рисунок 1 — Сравнение предельных кривых тепловой мощности для двух двигателей с короткозамкнутым ротором 90 кВт TEFC - 4-полюсный двигатель мощностью 90 кВт (1475 об / мин)
- 6-полюсный двигатель мощностью 90 кВт (985 об / мин)
Принцип выбора 2 //
Выбор двигателя увеличенного размера просто для «безопасности» обычно не рекомендуется , потому что это означает, что необходимо также выбрать преобразователь частоты увеличенного размера.Преобразователи частоты, особенно типа ШИМ, рассчитаны на максимальное пиковое значение тока, которое является суммой основного и гармонического токов в двигателе.
Чем больше двигатель, тем больше пиковые токи.
Во избежание превышения этим пиковым током проектного предела преобразователь никогда не следует использовать с двигателем, размер которого больше указанного . Даже когда более крупный двигатель слегка нагружен, его пиковые гармоники высоки.
Принцип выбора 3 //
После выбора двигателя достаточно легко выбрать правильный размер преобразователя из каталога производителя.Обычно они рассчитываются с точки зрения силы тока (не кВт) на основе определенного напряжения. Это следует использовать только в качестве руководства, потому что преобразователи всегда следует выбирать на основе максимального продолжительного тока двигателя.
Хотя большинство каталогов основано на стандартных номинальных мощностях двигателей (кВт) МЭК, двигатели разных производителей имеют несколько разные номинальные токи.
 Преобразователи частоты Danfoss (фото предоставлено schulz.st)
Преобразователи частоты Danfoss (фото предоставлено schulz.st)Принцип выбора 4 //
Хотя это кажется очевидным, двигатель и преобразователь должны быть указаны для напряжения и частоты источника питания, к которым должен быть подключен преобразователь частоты.
В большинстве стран, использующих стандарты IEC, стандартное напряжение питания составляет 380 В ± 6%, 50 Гц . В Австралии это 415 В ± 6%, 50 Гц . В некоторых приложениях, где размер привода очень велик, часто экономично использовать более высокое напряжение, чтобы снизить стоимость кабелей. Другие часто используемые напряжения — 500 В и 660 В .
В последние годы выпускаются преобразователи переменного тока для использования на 3,3 кВ и 6,6 кВ . Преобразователи частоты спроектированы таким образом, чтобы вырабатывать такое же выходное напряжение, что и источник питания, поэтому и двигатель, и преобразователь должны быть рассчитаны на одно и то же базовое напряжение.
Хотя выходная частота преобразователя может изменяться, входная частота (50 Гц или 60 Гц) должна быть четко указана , потому что это может повлиять на конструкцию индуктивных компонентов .
Ссылка // Практические приводы с регулируемой скоростью и силовая электроника Малкольма Барнса CPEng, BSc (ElecEng), MSEE, Автоматизированные системы управления, Перт, Австралия (печатную копию можно приобрести у Amazon)
,Как правильно выбрать преобразователь частоты для привода с регулируемой скоростью (VSD)?
 Применение: солоноватая вода — 3 APP 2,2, оборудованные инверторами Danfoss для гибкого использования во вселенной. Место установки: Великобритания
Применение: солоноватая вода — 3 APP 2,2, оборудованные инверторами Danfoss для гибкого использования во вселенной. Место установки: ВеликобританияВыбор преобразователя частоты для частотно-регулируемых приводов требует большого опыта. Если опыт недоступен, часто бывает полезно посетить либо эталонный завод с аналогичными приложениями, либо выставки или торговые выставки.
Контрольный список
Ниже приводится краткий контрольный список моментов, которые следует учитывать:
- Подробная информация об управляемой машине
- Экологические данные
- Сеть
- Техническое обслуживание, эксплуатация, персонал
- Финансовые критерии
- Меры защиты для операторов / преобразователя / двигателя
- Стандарты / правила
- Соображения по охране окружающей среды
- Также важно…
Приложения для приводов VLT (ВИДЕО)
Некоторые из интересных применений приводов Danfoss VLT:
- Приводы VLT в большой опреснительной установке
- Приводы VLT управляют вентиляторами градирни
- Система управления VLT оптимизирует скорость вращения шпинделя на индийской текстильной фабрике
- Преобразователи частоты VLT приводят в движение систему обработки багажа Преобразователи частоты
- VLT экономят 78% энергии в зоопарке Честера
1.Подробная информация об управляемой машине
- Требуемые характеристики установки / машины
- Характеристики крутящего момента, тормозной момент, ускоряющий момент
- Диапазон регулирования скорости, охлаждение
- Потребляемая мощность преобразователя и двигателя
- Рабочие квадранты
- Компенсация скольжения ( динамический )
- Требуемое время разгона и торможения
- Требуемое время торможения, время срабатывания тормоза
- Прямые передачи, шестерни, детали трансмиссии, момент инерции массы
- Синхронизация с другими приводами
- Наработка, органы управления
- Связь с компьютером, интерфейсы, визуализация
- Устройство и вид защиты
- Возможность интеграции децентрализованного интеллекта в преобразователь частоты
Перейти к контрольному списку ↑
2.Экологические данные
- Высота установки, температура окружающей среды
- Требования к охлаждению, варианты охлаждения
- Климатические условия, такие как влажность , вода , грязь , пыль , газы
- Особые предписания, например горнодобывающая промышленность , химическая промышленность , судостроительная промышленность , пищевая промышленность
- Акустический шум
Перейти к контрольному списку ↑
3.Сеть
- Напряжение сети, колебания напряжения
- Мощность сети
- Колебания частоты сети
- Помехи в сети
- Защита от короткого замыкания и перенапряжения
- Отключение сети
Перейти к контрольному списку ↑
4. Техническое обслуживание, эксплуатация, персонал
- Обучение и инструктаж операторов
- Техническое обслуживание
- Запасные части / запчасти
Перейти к контрольному списку ↑
5.Финансовые критерии
- Затраты на закупку ( комплектующих )
- Необходимое место, встроенная установка, конструкция
- Стоимость установки
- Ввод системы в эксплуатацию
- Стоимость установки
- Операционные расходы
- КПД системы (преобразователь частоты и машина )
- Требуемая реактивная мощность и компенсация гармонических нагрузок
- Срок службы продукта
Перейти к контрольному списку ↑
6.Меры защиты для операторов / преобразователя / двигателя
- Гальваническая развязка в соответствии с PELV
- Обрыв фазы
- Переключение на выходе преобразователя
- Защита от заземления и короткого замыкания
- Катушки двигателя для уменьшения времени нарастания напряжения
- Электронный тепловой контроль и подключение термисторов
Перейти к контрольному списку ↑
7. Нормы и правила
- Национальный DIN, BS, UL, CSA, VDE, Европейский EN
- Международный IEC, CE и т. Д.
Перейти к контрольному списку ↑
8. Экологические аспекты
- Возможность вторичной переработки продукта
- Производственная практика
- Коэффициенты энергосбережения
Перейти к контрольному списку ↑
Также важно…
Используя этот контрольный список, можно выбрать преобразователь частоты, который охватывает большинство элементов в стандартной комплектации, но вам также следует дважды проверить:
- Преобразователь имеет дроссели сети или промежуточной цепи для значительного уменьшения помех от сети.
- A Фильтр радиопомех для класса A или B является стандартным или приобретается отдельно
- При использовании преобразователя частоты требуется снижение мощности двигателя
- Сам преобразователь защищен от земли и короткого замыкания
- Преобразователь адекватно реагирует на неисправность.
Перейти к контрольному списку ↑
Приложения для приводов VLT (ВИДЕО)
1. Приводы VLT в большой опреснительной установке
Не можете посмотреть это видео? Щелкните здесь, чтобы посмотреть его на Youtube.
Перейти к приложениям ↑
2. Приводы VLT управляют вентиляторами градирни
Не можете посмотреть это видео? Щелкните здесь, чтобы посмотреть его на Youtube.
Перейти к приложениям ↑
3.Система управления VLT оптимизирует скорость вращения шпинделя на индийской текстильной фабрике
Не можете посмотреть это видео? Щелкните здесь, чтобы посмотреть его на Youtube.
Перейти к приложениям ↑
4. Преобразователи частоты LT приводят в движение систему обработки багажа
Не можете посмотреть это видео? Щелкните здесь, чтобы посмотреть его на Youtube.
Перейти к приложениям ↑
5. Диски LT экономят 78% энергии в зоопарке Честера
Не можете посмотреть это видео? Щелкните здесь, чтобы посмотреть его на Youtube.
Перейти к приложениям ↑
Ресурс: Факты, которые стоит знать о преобразователях частоты — Danfoss
,Какой типоразмер преобразователя частоты мне нужен?
Номинал преобразователя частоты (ПЧ)
При определении номинальной мощности преобразователя частоты при заданной нагрузке первым делом необходимо учитывать характеристики нагрузки . Существует четыре различных метода расчета требуемой выходной мощности, и выбор метода зависит от характеристик двигателя. Однако сначала давайте начнем с основ нагрузочных характеристик двигателя.
 Какой размер преобразователя частоты мне нужен (фото предоставлено Danfoss)
Какой размер преобразователя частоты мне нужен (фото предоставлено Danfoss) Нагрузочные характеристики
Прежде чем можно будет определить размер преобразователя частоты, необходимо провести различие между двумя наиболее широко используемыми характеристиками нагрузки.На рисунке 1 показаны четыре наиболее типичных двигателя нагрузки и их характеристики.
 Рисунок 1 — Типовые нагрузочные характеристики двигателя
Рисунок 1 — Типовые нагрузочные характеристики двигателя Группа 1 — Машины для намотки материала под натяжением (машины для резки фанеры)
Группа 2 — Конвейерные ленты, краны, поршневые насосы, а также станки
Группа 3 — Машины, такие как валки, гладильные станки и другие обрабатывающие машины
Группа 4 — Машины, работающие от центробежной силы (центрифуги, центробежные насосы и вентиляторы)
Причины различения нагрузочных характеристик следующие //
Когда скорость центробежных насосов и вентиляторов увеличивается, потребляемая мощность увеличивается на кубическую скорость (P = n 3 ).Нормальный рабочий диапазон центробежных насосов и вентиляторов — это диапазон скоростей от 50 до 90%. Коэффициент нагрузки увеличивается на квадрат скорости, т. Е. прибл. От 30 до 80% .
 Рисунок 2 — Постоянный и квадратный момент нагрузки
Рисунок 2 — Постоянный и квадратный момент нагрузкиЭти два фактора показаны в характеристиках крутящего момента двигателя, управляемого преобразователем частоты. На рисунках 3 и 4 показаны характеристики крутящего момента для двух разных типоразмеров FC — один из них (рисунок 4) на один диапазон мощности ниже другого.
Для обеих характеристик крутящего момента были введены одинаковые характеристики нагрузки для центробежного насоса .
На Рисунке 3 общий рабочий диапазон насоса (0-100%) находится в пределах номинальных значений двигателя. Поскольку нормальный рабочий диапазон насоса составляет 30-80% , можно выбрать преобразователь частоты с меньшей мощностью.
 Рисунки 3 и 4 — Слева: преобразователь частоты «Большой»; Справа: преобразователь частоты «меньшего размера».
Рисунки 3 и 4 — Слева: преобразователь частоты «Большой»; Справа: преобразователь частоты «меньшего размера».Если крутящий момент нагрузки постоянный, двигатель должен иметь возможность создавать крутящий момент, превышающий нагрузочный момент, поскольку избыточный крутящий момент используется для ускорения.
Перегрузочный момент 60% , создаваемый преобразователем частоты на короткое время, достаточен для ускорения и высокого пускового момента, например в сочетании с конвейерными лентами .
Момент перегрузки также гарантирует, что система способна справиться с внезапным увеличением нагрузки. Преобразователь частоты, который не допускает перегрузки по крутящему моменту, должен быть выбран таким, чтобы ускоряющий крутящий момент (TB) находился в пределах номинального крутящего момента.
 Рисунок 5 — Крутящий момент перегрузки используется для ускорения
Рисунок 5 — Крутящий момент перегрузки используется для ускорения4 метода с разными наборами данных двигателя //
После определения характеристик нагрузки существует четыре различных набора данных двигателя для определения мощности преобразователя частоты (FC).
Метод №1 (ток Im)
Преобразователь частоты можно быстро и точно определить на основе тока I M , который принимает двигатель . Если двигатель не полностью нагружен, ток двигателя можно измерить в аналогичной системе при полной работе.
 Рисунок 6 — Выбор преобразователя частоты по номинальному току
Рисунок 6 — Выбор преобразователя частоты по номинальному токуПример // Двигатель 7,5 кВт, 3 x 400 В потребляет 14,73 А.
Исходя из технических данных преобразователя частоты, выбирается преобразователь частоты, у которого максимальный длительный выходной ток больше или равен 14.73 A при постоянном или квадратичном крутящем моменте.
Примечание // Если преобразователь частоты выбирается на основе мощности (методы 2–4), важно, чтобы рассчитанная мощность и мощность, указанная в технических характеристиках преобразователя частоты, сравнивались при одном и том же напряжении.
В этом нет необходимости, если FC рассчитывается на основе тока (метод 1) , поскольку выходной ток FC влияет на другие данные.
Метод №2 (полная мощность Sm)
Преобразователь частоты можно выбрать на основе полной мощности S M , потребляемой двигателем, и полной мощности, выдаваемой преобразователем частоты.
 Рисунок 7 — Выбор преобразователя частоты в зависимости от полной мощности
Рисунок 7 — Выбор преобразователя частоты в зависимости от полной мощностиПример // Двигатель 7,5 кВт, 3 × 400 В потребляет 14,73 А

Ссылаясь на технические данные преобразователя частоты, выбирается максимальная продолжительная мощность которого на больше или равна 10,2 кВА при постоянном или квадратичном крутящем моменте.
Метод №3 (мощность Pm)
Преобразователь частоты также может быть выбран в соответствии с мощностью P M , создаваемой двигателем .Однако, поскольку cos φ и КПД η изменяются в зависимости от нагрузки, этот метод неточен.
 Рисунок 8 — Выбор преобразователя частоты в зависимости от выходной мощности на валу
Рисунок 8 — Выбор преобразователя частоты в зависимости от выходной мощности на валуПример // Двигатель мощностью 3 кВт с КПД и cos φ 0,80 или 0,81 выглядит следующим образом //

Выбирается преобразователь частоты — в соответствии с техническими данными преобразователя частоты — который имеет максимальную длительную выходную мощность больше или равную 4.6 кВА при постоянном или квадратичном крутящем моменте.
Метод №4 (стандартная серия двигателей)
По практическим соображениям номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных двигателей . Следовательно, преобразователи частоты часто выбираются на этой основе, но это может привести к неточному выбору размеров, особенно если двигатель не подвергается полной нагрузке.
 Рисунок 9 — Выбор преобразователя частоты из стандартной серии двигателей
Рисунок 9 — Выбор преобразователя частоты из стандартной серии двигателейО технологии регулируемой скорости (ВИДЕО)
Справочная информация // Факты, которые стоит знать о преобразователях частоты от Danfoss
,