Контроллер трехфазного бесколлекторного двигателя | Силовая электроника
Хилл Мартин
Карташов Евгений
№ 5’2010
PDF версия
В статье обсуждаются требования к минимальным ресурсам, необходимым микроконтроллеру на базе Microchip PIC12 для управления скоростью трехфазного бесколлекторного двигателя постоянного тока (BLDC). Показано, как техника минимизации позволяет снизить количество выводов I/O (Input/Output) для данного применения до шести. Предполагается, что читатели знакомы с алгоритмами управления указанного типа двигателей.
Каковы должны быть минимальные ресурсы микроконтроллера, работающего в составе привода трехфазного BLDC-мотора? Для ответа на этот вопрос необходимо соотнести возможности чипсета с принципами управления указанного двигателя и предъявляемыми к устройству функциональными требованиями. Если мы рассматриваем рынок простых и дешевых схем управления скоростью в таких применениях, как вентиляторы и насосы, то проблема может быть существенно упрощена. Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Система управления BLDC-мотором
На рис. 1 приведена блок-схема управления BLDC-мотором, содержащая датчик Холла для формирования обратной связи по положению ротора (как правило, используется три датчика), потенциометр задания скорости, кнопки включения и выключения системы, датчик перегрузки по току и трехфазный силовой каскад, соединенный с мотором.
Рис. 1. Блок-схема управления BLDC-мотором
Общее количество независимых подключений контроллера составляет 11 (пять входов и шесть выходов). Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Технология минимизации ресурсов
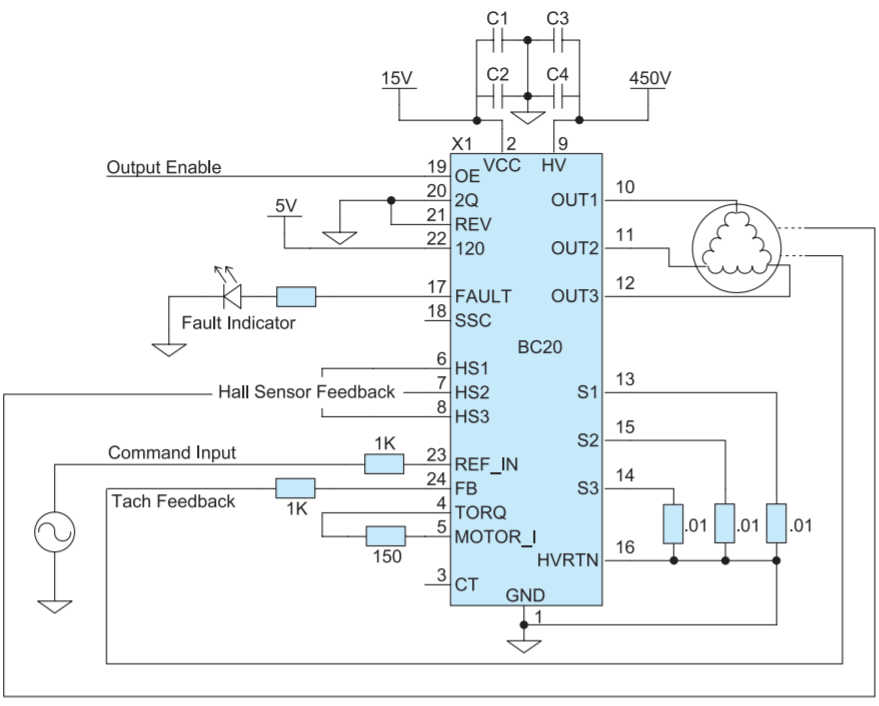
В случае, если используется стандартный шестиступенчатый алгоритм управления BLDC-мотором, в каждый момент времени только два транзистора инвертора (один в верхнем плече и один в нижнем) находятся во включенном состоянии. Управление ключами трехфазного силового каскада не является комплиментарным, транзисторы открываются в т. н. «диагональном режиме». С точки зрения минимизации логики это является преимуществом, поскольку два из трех ключей верхнего уровня закрыты при нормальной работе привода. Сигнал управления третьим транзистором может быть извлечен из двух других с помощью нескольких резисторов и транзисторного инвертора, подключенного к третьему входу верхнего уровня моста (см. рис. 4 — принципиальная схема). Таким образом удается сократить количество использованных выводов контроллера с шести до пяти.
Существует несколько различных путей оптимизации количества системных входов, предназначенных для подключения датчиков Холла, потенциометра, сенсоров тока перегрузки и ключей «Пуск/ Стоп». Датчики Холла, как правило, встраиваются в BLDC-двигатель, поэтому целесообразно интегрировать в мотор и схему, формирующую цифровой интерфейс для их связи с микроконтроллером. Выход подобной схемы выполняется в виде откры- того коллектора с «подтягивающим» резистором. В этом случае требуется один датчик Холла и один цифровой вход микросхемы семейства PIC12F.
Для запуска мотора и задания скорости при включении системы один из входов верхнего плеча трехфазного инвертора может быть сконфигурирован как аналоговый вход. Для реализации данной задачи этот вывод подключается к резистивному делителю и потенциометру уставки, что позволяет задать и считать значение скорости перед пуском мотора.
Ключ «Пуск» кроме основной задачи может нести и дополнительную функцию снижения уставки скорости ниже минимального значения. В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
Функцию остановки запущенного двигателя удобно выполнять в комбинированном режиме «Пуск/Стоп» в ходе цикла коммутации. Таким образом, остановка мотора реализуется программно-аппаратным методом в процессе выбега. Когда ключ «Стоп» нажимается при вращении, все сигналы управления транзисторами верхнего уровня блокируются, программа анализирует состояние мотора и запускает режим торможения. В простейшем случае функция остановки может выполняться нормально-разомкнутым тумблером, подключенным параллельно описанной выше цепи защиты от токовой перегрузки.
В схеме защиты от перегрузки по току не задействован ни один из выводов I/O микроконтроллера, для этой цели используется цепь подключения питания микросхемы семейства PIC12, позволяющая включить схему в режим перезагрузки при возникновении аварии. Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
В результате проведенной оптимизации системе требуется один выделенный цифровой вход, а также один цифровой/аналоговый и четыре цифровых вывода, выполняющих функции выходов. Здесь не учтен тот факт, что для управления скоростью необходима широтно-импульсная модуляция напряжения, поступающего на BLDC-мотор. В нашем случае контрольные импульсы должны поступать на транзисторы нижнего уровня. В реальности, поскольку в системе используется режим шестиступенчатого управления, ШИМ-сигнал в любой момент времени подается только на один из трех нижних ключей инвертора.
Некоторые PIC-контроллеры обладают особой периферией, способной формировать программный «моторный» ШИМ-сигнал, в то время как другие могут вырабатывать ШИМ-напряжение только на одном из n выходов. В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).
В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).
Рис. 2. Аппаратная реализация схемы
Программа управления использует сигнал одного датчика Холла для синхронизации импульсов управления транзисторами инвертора, а также для определения моментов времени коммутации по так называемой технологии точного расчета траектории. Помимо всего прочего, это позволяет сформировать замкнутый контур управления скоростью при помощи простейшего ПИД-регулятора, на который поступает сигнал ошибки по скорости (рис. 3).
3).
Рис. 3. Блок-схема управления скоростью мотора
Выход PI-контроллера загружается в регистр коэффициента заполнения импульсов CCPR1, занимая восемь старших разрядов. Выход подсистемы формирования ШИМ-сигнала коммутируется вместе с одним из трех транзисторов нижнего плеча инвертора, что позволяет осуществлять управление мотором и контроль скорости.
Три встроенных таймера PIC12 используются для измерения скорости двигателя по сигналу датчика Холла (TMR1), задания периода коммутации (TMR2) и генерации прерывания после окончания периода предварительного расчета (TMR0).
При включении питания считывается уставка скорости, после чего система может быть запущена с помощью ключа «Пуск». После подачи команды на запуск привода происходит оценка положения ротора и активируется программа формирования короткой разомкнутой петли регулирования. Она работает до тех пор, пока не будет продетектировано появление следующего сигнала датчика Холла. С этого момента времени коммутация инвертора синхронизируется с положением ротора. После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
Аппаратная реализация системы управления включает трехфазный BLDC-мотор, низковольтный силовой модуль инвертора и контроллер PIC12F615, подключенный к модифицированной демо-плате Microchip. Было показано, что данная топология схемы позволяет использовать шесть I/O контактов микроконтроллера с многофункциональными выводами. Гибкая внутренняя периферия PIC12HV615 и встроенный параллельный регулятор дают возможность создать схему (рис. 4), выполняющую все необходимые для данного применения функции. Таким образом, создана основа для проектирования простых и дешевых систем управления скоростью в случаях, когда не требуется высокая точность работы привода.
Рис. 4. Принципиальная схема привода BLDC-мотора с контроллером PIC12HV615
Контроллеры бесколлекторных двигателей компании Сервосила
Компания СЕРВОСИЛА обновила линейку своих миниатюрных встраиваемых контроллеров бесколлекторных двигателей.
Компания Сервосила изначально разработала данные контроллеры для применения в своих собственных продуктах — руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры СЕРВОСИЛА нашли широкое применение в самых различных отраслях промышленности и науки, — везде, где требуется компьютерное управление бесколлекторными двигателями.
Сервоконтроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод. Основными областями применения данных контроллеров бесколлекторных двигателей являются:
сервомеханизмы, сервоприводы,
тяговые электроприводы,
АСУ ТП, промышленные линии, конвейеры, насосы,
робототехнические устройства,
интеллектуальное торговое оборудование,
автоматизированное складское оборудование,
испытательные стенды с компьютерным управлением,
системы измерения и автоматической диагностики,
тяговые электроприводы различных мобильных шасси,
станки с ЧПУ,
системы компьютерного зрения.
Контроллеры (brushless motor controllers) предназначены для управления бесколлекторными двигателями (PMSM, BLDC) любых производителей в сочетании с различными энкодерами абсолютного положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ, PLC или к бортовым системам управления контроллеры предоставляют интерфейсы управления CANbus/CANopen и USB 2.0.
Сопутствующее программное обеспечение работает с любыми операционными системами, поддерживающими интерфейсы CANbus или USB такими, как Windows, Linux, включая отечественную Astra Linux, и Raspberry PI OS.
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики бесколлекторного электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам.
В модулях управления бесколлекторными двигателями СЕРВОСИЛА реализованы современные алгоритмы управления:
Field Oriented Control (FOC),
с Back-EMF Observer и Hall Sensors Observer,
с функцией Q-D axis coupling compensation для гладкости хода,
с опциональным field weakening для достижения максимальных скоростей вращения,
с интеллектуальными алгоритмами защиты
и управления динамикой электродвигателя,
и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Проектирование и создание программируемого 3-фазного контроллера двигателя с использованием встроенной системы Arduino — MyProjectCircuits
Перейти к содержимому₦ 2999,00
В этом проекте предлагается управление скоростью трехфазного асинхронного двигателя с помощью контроллера Arduino.
Проектирование и создание программируемого 3-фазного контроллера двигателя с использованием встроенной системы Arduino
Категория: Темы проектов по электротехнике и электронике Теги: Встроенная система Arduino., Проектирование и создание программируемого 3-фазного контроллера двигателя с использованием встроенной системы Arduino, Контроллер двигателя
- Описание
- Отзывы (0)
Описание
АННОТАЦИЯ
В этом проекте предлагается управление скоростью трехфазного асинхронного двигателя с помощью контроллера Arduino. Контроллер Arduino используется для создания сигналов широтно-импульсной модуляции (ШИМ). А скорость двигателя регулируется с помощью схемы драйвера и трехфазного инвертора.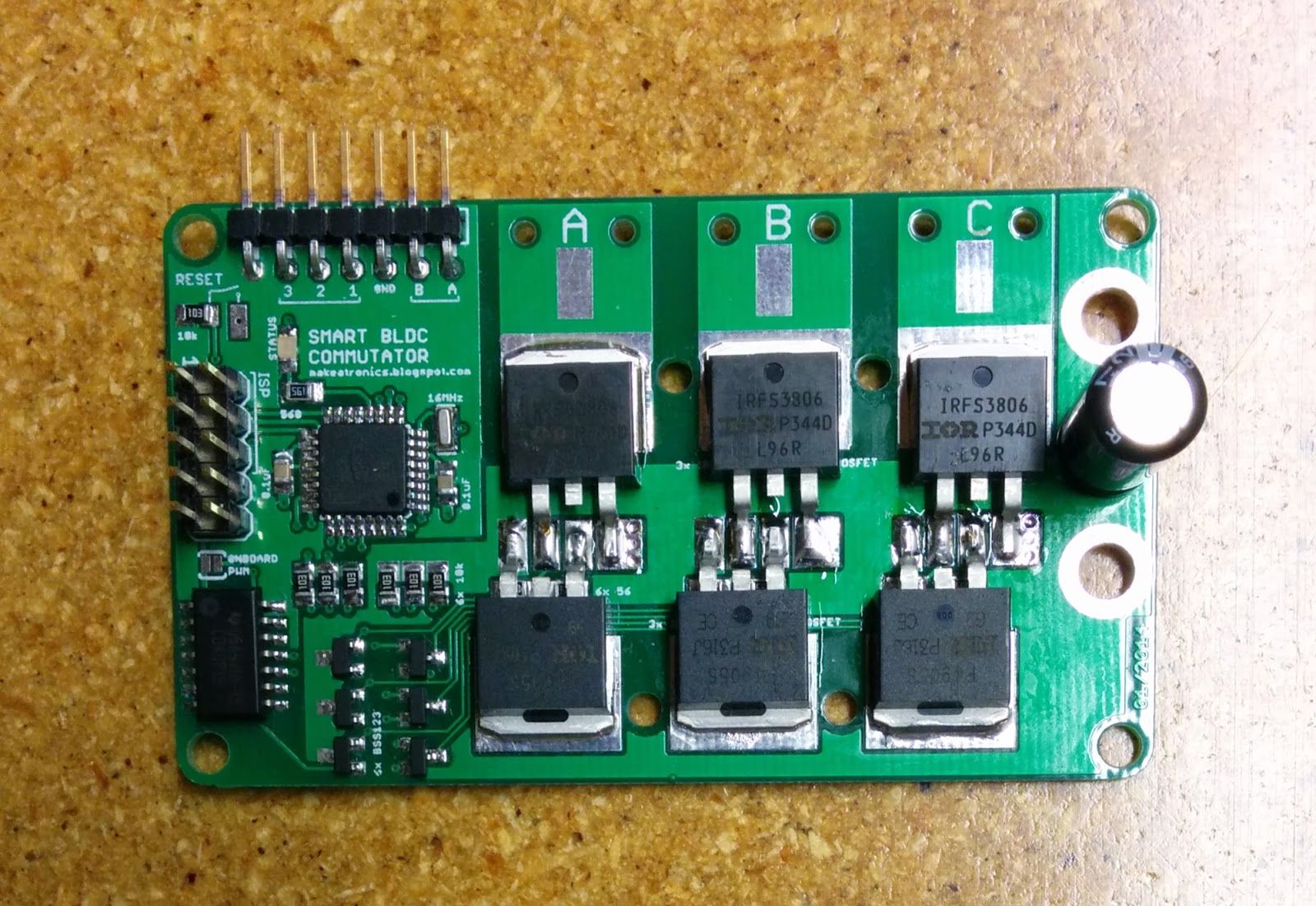
СОДЕРЖАНИЕ
ОБЛОЖКА
ТИТУЛЬНАЯ СТРАНИЦА
СТР.
РЕФЕРАТ
ГЛАВА ПЕРВАЯ
- ВВЕДЕНИЕ
- ПРЕДПОСЫЛКИ ПРОЕКТА
- ПОСТАНОВКА ЗАДАЧИ
- ЦЕЛЬ И ЗАДАЧА ПРОЕКТА
- ЗНАЧЕНИЕ ПРОЕКТА
- ЗАЯВКА ПРОЕКТА
- ОБЪЕМ ПРОЕКТА
- МЕТОДОЛОГИЯ
- ПРОЕКТНАЯ ОРГАНИЗАЦИЯ
ГЛАВА ВТОРАЯ
ОБЗОР ЛИТЕРАТУРЫ
- ОБЗОР КОНСТРУКЦИИ АИНХОННОГО ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА
- НАЗНАЧЕНИЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
- КОНСТРУКЦИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
- ПРИНЦИПЫ РАБОТЫ
- ОБЗОР ARDUINO MEGA 2560
ГЛАВА ТРЕТЬЯ
МЕТОДОЛОГИЯ
- БЛОК-СХЕМА СИСТЕМЫ
- ОПИСАНИЕ СИСТЕМЫ
- СХЕМА СОЕДИНЕНИЙ
- СИСТЕМНЫЙ КОД
ГЛАВА ЧЕТВЕРТАЯ
4. 0 ИСПЫТАНИЯ И АНАЛИЗ РЕЗУЛЬТАТОВ
0 ИСПЫТАНИЯ И АНАЛИЗ РЕЗУЛЬТАТОВ
- ПРОЦЕДУРА СТРОИТЕЛЬСТВА И АНАЛИЗ ИСПЫТАНИЙ
- КОРПУС И УПАКОВКА
- СБОРКА СЕКЦИЙ
- ПРОВЕРКА РАБОТЫ СИСТЕМЫ
- НАБЛЮДЕНИЯ
- ПРОБЛЕМЫ, ВОЗНИКШИЕ В СИСТЕМЕ
ГЛАВА ПЯТАЯ
- ЗАКЛЮЧЕНИЕ
- РЕКОМЕНДАЦИЯ
- ССЫЛКИ
ГЛАВА ПЕРВАЯ
- ВВЕДЕНИЕ
1.1 ПРЕДПОСЫЛКИ ПРОЕКТА
Большое количество двигателей используется для общих целей в нашем окружении, от бытового оборудования до станков в промышленности. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и области применения этих двигателей очень разнообразны. Во многих приложениях большую роль играет регулирование скорости двигателя, которое может быть реализовано с использованием широкого спектра стратегий управления.
Назначение регулятора скорости двигателя состоит в том, чтобы принимать сигнал, представляющий требуемую скорость, и управлять двигателем с этой скоростью. Контроллер может или не может фактически измерять скорость двигателя.
Как правило, регулирование скорости двигателя может быть достигнуто путем изменения входных параметров двигателя, таких как ток, напряжение и т. д. Это может быть достигнуто различными методами, такими как метод управления полем, метод управления якорем, метод Уорда-Леонарда и т. д. для постоянного тока двигателей и двигателей переменного тока.
В настоящее время, благодаря совершенствованию устройств силовой электроники, подача энергии на двигатель контролируется переключением силовых ключей (MOSFET, IGBT, IGCT и т. д.).
Этот проект включал создание устройства плавного пуска для трехфазного асинхронного двигателя с использованием Arduino. Этот проект предназначен для плавного запуска трехфазного асинхронного двигателя и позволяет избежать мгновенного достижения полной скорости двигателя. Устройство плавного пуска для трехфазного асинхронного двигателя используется для управления скоростью тока и скорости асинхронного двигателя при запуске. Асинхронный двигатель потребляет очень большой ток при запуске, и двигатель мгновенно достигает полной скорости. Оба эти эффекта вызывают механические рывки в двигателе при пуске, а большой ток вызывает электрические напряжения в обмотках асинхронного двигателя, которые могут повредить обмотки асинхронного двигателя.
Устройство плавного пуска для трехфазного асинхронного двигателя используется для управления скоростью тока и скорости асинхронного двигателя при запуске. Асинхронный двигатель потребляет очень большой ток при запуске, и двигатель мгновенно достигает полной скорости. Оба эти эффекта вызывают механические рывки в двигателе при пуске, а большой ток вызывает электрические напряжения в обмотках асинхронного двигателя, которые могут повредить обмотки асинхронного двигателя.
1.2 ПОСТАНОВКА ЗАДАЧИ
Традиционные методы пуска и регулирования скорости однофазного асинхронного двигателя часто требуют довольно дорогого внешнего электрического оборудования. Кроме того, они требуют механических переключателей, которые являются наиболее проблемными деталями. Эти переключатели подвержены механическому износу, который влияет на работу двигателя. Программируемый контроллер 3-фазного двигателя с использованием Arduino был изобретен для решения этой проблемы, поскольку он обеспечивает плавный пуск для 3-фазного асинхронного двигателя.
1.3 ЦЕЛЬ И ЗАДАЧА ПРОЕКТА
Основной целью данной работы является создание программируемого устройства плавного пуска и управления для трехфазного двигателя переменного тока с использованием Arduino в качестве основы проекта. . Цель состоит в том, чтобы обеспечить непрерывное плавное изменение синхронной скорости, что, в свою очередь, требует изменения частоты питания асинхронного двигателя. Это достигается с помощью Arduino для питания двигателя с помощью программируемого управления.
1.4 ЗНАЧИМОСТЬ ПРОЕКТА
Устройство плавного пуска трехфазного асинхронного двигателя используется для контроля скорости, тока и скорости асинхронного двигателя при пуске. .
1.5 ПРИМЕНЕНИЕ ПРОЕКТА
Может использоваться для управления небольшими конвейерными лентами в двух направлениях, а с диммером может управлять как направлением, так и скоростью.
Эту схему также можно использовать для любого роботизированного приложения, где необходимо управление направлением с регулированием скорости, например, в винтах радиоуправляемых вертолетов или самолетов.
1.6 ОБЪЕМ ПРОЕКТА
Это устройство управляет скоростью трехфазного асинхронного двигателя с помощью контроллера Arduino. Устройство было построено на Arduino Mega2560. Arduino используется для считывания сигналов пересечения нуля из цепей обнаружения пересечения нуля.
1.7 МЕТОДОЛОГИЯ
Для достижения цели и задач данной работы необходимо выполнить следующие шаги: 9000 9
- Изучение предыдущей работы над проектом с целью повышения ее эффективности.
- Нарисуйте блок-схему.
- Проверка непрерывности компонентов и устройств,
- Проводка Arduino
- Выполнен проект и расчет на работу.

- Изучение различных компонентов, используемых в схеме.
- Построить всю схему.
- Наконец, все устройство было помещено в корпус и проведено финальное испытание.
1.8 ПРОЕКТНАЯ ОРГАНИЗАЦИЯ
Работа организована следующим образом. работы, во второй главе представлен обзор литературы по исследованию, в третьей главе описаны применяемые методы, в четвертой главе обсуждаются результаты исследования. В пятой главе работы обобщаются результаты исследования и рекомендации.
Категории продуктов
- Бухгалтерский учет (Ac) Темы проектов
- Темы проектов по бухгалтерскому учету
- Темы проекта по обучению взрослых и начальному образованию
- Темы проектов сельскохозяйственной и биоэкологической инженерии
- Темы проектов сельскохозяйственной инженерии
- Темы образовательного проекта по сельскохозяйственным наукам
- Темы сельскохозяйственных научных проектов
- Банковское дело и финансы (Bf) Темы проекта
- Темы проектов по банковскому и финансовому делу
- Темы проекта базового образования
- Темы образовательного проекта по биологии
- Биомедицинские темы Темы проекта
- Темы проектов по строительству/технологиям
- Бизнес-администрирование и управление (BAM) Темы проекта
- Темы проекта по химическим и геологическим наукам
- Темы проекта химического машиностроения
- Темы образовательного проекта по химии
- Темы проекта гражданского образования
- Темы проектов по гражданскому и экологическому строительству
- Темы проекта гражданского строительства
- Темы проектов по кооперативной экономике и управлению
- Темы проекта общественного здравоохранения
- Темы проекта компьютерной инженерии
- Темы проекта по информатике
- Темы проектов по руководству и консультированию в области совместных исследований
- Темы проекта экономического образования
- Темы образовательных проектов
- Темы проекта по электротехнике и электронике
- Научная школа гигиены окружающей среды
- Темы проекта управления недвижимостью
- Темы проектов сельскохозяйственной энергетики и машин
- Темы проекта «Продовольствие и питание»
- Темы проекта санитарного просвещения
- Темы проектов дорожного и транспортного строительства
- Темы проектов по истории
- Отдел гостиничного бизнеса и транспорта Темы проекта
- Темы проекта управления гостиничным бизнесом
- Кинетика человека и санитарное просвещение Темы проекта
- Темы проектов по промышленной безопасности и охране окружающей среды
- Темы проекта исламских исследований
- Темы юридического проекта
- Темы проекта по библиотечному делу
- Темы морских инженерных проектов
- Темы проекта морского транспорта
- Темы проектов отдела маркетинга
- Темы проекта массовой коммуникации
- Темы проектов по математике и статистике
- Темы проекта машиностроения
- Мехатроника
- Темы проектов в области медицины и здравоохранения
- Темы научного проекта медицинской лаборатории
- Тематика металлургического машиностроения
- Темы проектов по микробиологии
- Темы проектов по разработке полезных ископаемых и нефтяных ресурсов
- Темы проекта по сестринскому делу и акушерству
- Темы проекта «Питание и диетология»
- Темы проектов по офисным технологиям и управлению
- Темы проектов нефтегазовой инженерии
- Темы проекта фельдшера
- Темы проектов нефтегазовой инженерии
- Темы аптечного проекта
- Темы проекта по обучению физике
- Темы проектов по физике
- Темы проектов по политологии
- Темы проекта государственного управления
- Темы проекта по санитарному просвещению
- Темы проектов по связям с общественностью
- Темы проектов по закупкам и поставкам
- Темы проекта по обследованию количества
- Темы образовательного проекта по религиоведению
- Научная лаборатория Технологический проект Темы
- Темы семинара
- Темы проекта полового воспитания
- Темы образовательного проекта по общественным наукам
- Темы проекта по инженерным системам почвы и воды
- Схема производственного опыта студентов Технический отчет
- Темы геодезических и геоинформационных проектов
- Без категории
- Водоснабжение и водоотведение
Перейти к началу
Моделирование трехфазного инвертора | Как спроектировать контроллеры двигателей с помощью Simscape Electrical, часть 2, видео
Из серии: Как спроектировать контроллеры двигателей с помощью Simscape Electrical
Мелда Улусой, MathWorks
В этом видео показано, как можно смоделировать трехфазный инвертор с помощью Simscape Electrical™.
Загрузите модель, использованную в этом видео.
Посмотрите это видео, чтобы узнать больше об управлении двигателем BLDC
В этом видео мы покажем вам, как можно смоделировать трехфазный инвертор для преобразования мощности постоянного тока в трехфазные токи для управления двигателем BLDC.
Это модель, которую мы построили в предыдущем видео. Здесь у нас был сценарий, в котором мы поворачивали вал двигателя и измеряли противо-ЭДС на одной из открытых фаз. На этот раз вместо того, чтобы использовать двигатель в качестве генератора, мы будем управлять двигателем, подавая питание на одну из пар катушек, используя модель инвертора.
В этом видео мы будем ссылаться на наше видео Tech Talk, где мы обсуждаем алгоритм управления, включая трехфазный инвертор и логику коммутации. Так что вы можете проверить это, прежде чем смотреть это видео, чтобы понять, как работают эти компоненты. В этом видео мы сосредоточимся на этой части алгоритма, а в следующих поработаем над остальной частью модели.
Мы удалили некоторые блоки из предыдущей модели, так как они нам не нужны для моделирования инвертора. После добавления инерции нагрузки и ввода ее значения можно приступать к моделированию трехфазного инвертора. Эта картинка из нашего видео Tech Talk поможет нам с моделированием инвертора. Трехфазный инвертор представляет собой схему, которая преобразует постоянный ток в переменный с помощью трех пар переключателей инвертора, каждый из которых соответствует фазе. В зависимости от того, как вы хотите смоделировать трехфазный инвертор, вы можете выбрать один из различных вариантов, доступных в разделе полупроводников и преобразователей в Simscape Electrical.
В этом примере мы будем использовать МОП-транзисторы. Вы можете использовать техпаспорт вашего силового инвертора, чтобы указать параметры этого блока. Теперь попробуем построить такую же схему, как на этой картинке, вставив нужные блоки и соединив их между собой. Начнем с первой пары переключателей, которые контролируют токи фазы А.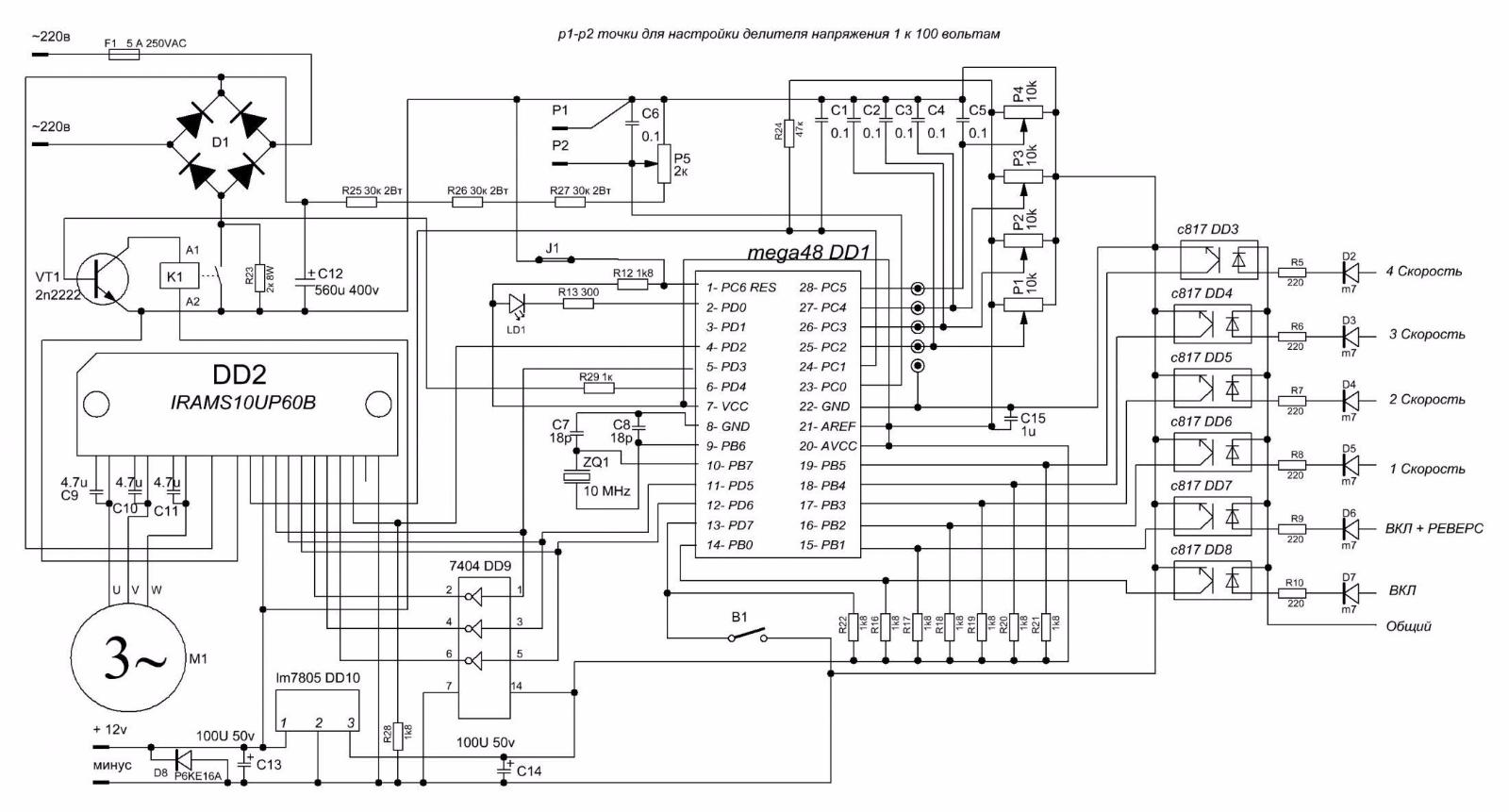 Мы просто продублируем переключатель и назовем верхний AH, поскольку он является переключателем верхней стороны, и аналогичным образом пометим нижний как AL для переключателя нижней стороны. S1 и S2 показывают номера переключателей. Вход напряжения постоянного тока в инвертор может быть смоделирован с помощью блока источника напряжения.
Мы просто продублируем переключатель и назовем верхний AH, поскольку он является переключателем верхней стороны, и аналогичным образом пометим нижний как AL для переключателя нижней стороны. S1 и S2 показывают номера переключателей. Вход напряжения постоянного тока в инвертор может быть смоделирован с помощью блока источника напряжения.
Теперь мы можем подключить эту цепь к фазе А, как показано на рисунке. Мы можем завершить остальную часть схемы, скопировав и вставив эту пару переключателей. На вход МОП-транзистора подается либо высокий, либо низкий сигнал для его включения и выключения соответственно. Как мы обсуждали в видео Tech Talk, для правильной работы двигателя нам необходимо подключить правильную пару фаз в нужное время. В алгоритме управления это решение принимается путем определения углового положения и на его основе расчета схемы переключения трехфазного инвертора. Мы будем моделировать эти части в следующем видео.
В этом видео мы предположим статическую схему переключения, в которой мы запитываем только фазы A и C, а затем наблюдаем за движением ротора. Мы можем смоделировать этот статический шаблон переключения, используя вектор из шести постоянных значений для включения или выключения шести переключателей. Чтобы распределить этот вектор значений на соответствующие переключатели с низкой и высокой стороны, мы можем использовать блок демультиплексора вместе с блоками «goto» и «from». Таким образом, мы получаем чистый вид, соединяя два сигнала вместе, не показывая никаких проводов. Здесь нам нужно преобразовать сигнал Simulink, который равен 1 или 0, в сигнал Simscape, прежде чем подключать его к нашей схеме. Остальные порты можно подключить с помощью блоков «goto» и «from».
Мы можем смоделировать этот статический шаблон переключения, используя вектор из шести постоянных значений для включения или выключения шести переключателей. Чтобы распределить этот вектор значений на соответствующие переключатели с низкой и высокой стороны, мы можем использовать блок демультиплексора вместе с блоками «goto» и «from». Таким образом, мы получаем чистый вид, соединяя два сигнала вместе, не показывая никаких проводов. Здесь нам нужно преобразовать сигнал Simulink, который равен 1 или 0, в сигнал Simscape, прежде чем подключать его к нашей схеме. Остальные порты можно подключить с помощью блоков «goto» и «from».
Теперь для измерения токов и напряжений, которые будут подведены к каждой из фаз, мы можем использовать блоки датчика фазного напряжения и датчика тока. Щелкнув правой кнопкой мыши по блоку и выбрав эту опцию, мы можем развернуть этот порт, чтобы отобразить три фазы. Проделаем то же самое и с этим датчиком. Если бы вы были в лаборатории и хотели измерить силу тока с помощью амперметра, вы бы соединили его клеммы последовательно с цепью. Точно так же при моделировании вы подключаете датчик тока последовательно. Порт I выводит измеренные трехфазные токи, которые мы подключаем к осциллографу для визуализации после преобразования их в сигналы Simulink. А для измерения напряжения подключаем датчик параллельно между электрическими узлами двигателя. Точно так же мы подключаем выходной порт к области.
Точно так же при моделировании вы подключаете датчик тока последовательно. Порт I выводит измеренные трехфазные токи, которые мы подключаем к осциллографу для визуализации после преобразования их в сигналы Simulink. А для измерения напряжения подключаем датчик параллельно между электрическими узлами двигателя. Точно так же мы подключаем выходной порт к области.
Выделим эти блоки и создадим подсистему, которую переименуем в трехфазный инвертор. В этом видео мы показали, как вы можете смоделировать свой собственный трехфазный инвертор с нуля, но обратите внимание, что вы также можете найти встроенный блок для трехфазного инвертора в библиотеке Simscape. Этот блок позволяет вам выбирать из различных переключающих устройств, таких как идеальный переключатель, MOSFET или IGBT для моделирования вашего инвертора.
Чтобы исследовать движение ротора, нам нужен еще один датчик для измерения скорости. Для этого мы используем идеальный блок датчика вращательного движения, который выводит скорость и положение двигателя через порты W и A соответственно. Мы устанавливаем начальное угловое положение на 0 градусов в блоке датчика движения. Также обратите внимание, что эти блоки преобразования позволяют вам определять единицы измерения, поэтому вам не нужен дополнительный блок для преобразования между градусами и радианами. Далее мы назовем сигналы «шаблон переключения» и «угловое положение». Затем мы регистрируем их, щелкая правой кнопкой мыши по каждому из сигналов и выбирая эту опцию. У нас есть сценарий MATLAB, который автоматически запускает эту модель Simulink, а затем использует зарегистрированные сигналы для создания анимации положения ротора. Чтобы увидеть эту анимацию, давайте перейдем в командную строку и запустим скрипт, введя его имя и нажав «Enter». Здесь мы видим возбужденные фазы A и C и результирующее положение ротора. Если вы смотрели наше первое видео Tech Talk, вы, возможно, помните, что мы обсуждали, как подача питания на разные пары катушек приводит к различному выравниванию ротора. В этом видео мы показали вам, как вы можете смоделировать это в симуляции и поэкспериментировать со своей моделью.
Мы устанавливаем начальное угловое положение на 0 градусов в блоке датчика движения. Также обратите внимание, что эти блоки преобразования позволяют вам определять единицы измерения, поэтому вам не нужен дополнительный блок для преобразования между градусами и радианами. Далее мы назовем сигналы «шаблон переключения» и «угловое положение». Затем мы регистрируем их, щелкая правой кнопкой мыши по каждому из сигналов и выбирая эту опцию. У нас есть сценарий MATLAB, который автоматически запускает эту модель Simulink, а затем использует зарегистрированные сигналы для создания анимации положения ротора. Чтобы увидеть эту анимацию, давайте перейдем в командную строку и запустим скрипт, введя его имя и нажав «Enter». Здесь мы видим возбужденные фазы A и C и результирующее положение ротора. Если вы смотрели наше первое видео Tech Talk, вы, возможно, помните, что мы обсуждали, как подача питания на разные пары катушек приводит к различному выравниванию ротора. В этом видео мы показали вам, как вы можете смоделировать это в симуляции и поэкспериментировать со своей моделью.