Микроконтроллерное управление электроприводом. Алексеев К.Б., Палагута К.А. 2008 г.
- Главная|
- Литература
- Просмотров: 22963
Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Название: Микроконтроллерное управление электроприводом
Авторы: Алексеев К.Б., Палагута К.А.
Издательство: МГИУ
Год издания: 2008
Страниц: 298
ISBN: 978-5-2760-1414-2
Формат: DJVU
Размер: 10,4 Мб
Язык: русский
Оглавление
Введение
Глава 1. Тенденции развития систем управления электроприводом
Тенденции развития систем управления электроприводом
1.1- Назначение и виды электроприводов
1.2. Основные тенденции развития встроенных систем управления двигателем
1.3. Типовые структуры перспективных систем управления приводами переменного тока
1.4. Преимущества цифровых электроприводов
1.5. Требования к микроконтроллеру в зависимости от круга решаемых задач
Глава 2. Система управления электроприводом на базе асинхронного электродвигателя с помощью микроконтроллера
2.1. Вращающееся магнитное поле машины переменного тока
2.2. Конструкция и принцип действия трехфазных асинхронных машин
2.2.1. Конструкция трехфазных асинхронных машин
2.2.2. Распределенная обмотка статора трехфазных асинхронных машин
2.2.3. Принцип действия трехфазных асинхронных машин
2.3. Схема включения, статические характеристики и режимы работы асинхронного двигателя
2.3.1. Схема включения асинхронного двигателя
2.3.2. Электромеханическая характеристика асинхронного двигателя
 3.3. Механическая характеристика асинхронного двигателя
3.3. Механическая характеристика асинхронного двигателя2.4. Асинхронный электропривод с прямым цифровым управлением и развитыми интеллектуальными свойствами
2.5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления
2.5.1. Ключевые особенности AT90PWM3
2.5.2. Принцип действия
Глава 3. Система управления электроприводом на базе синхронного и вентильного электродвигателей с помощью микроконтроллера
3.1. Синхронная машина с электромагнитным возбуждением
3.1.1. Конструкция синхронной машины с электромагнитным возбуждением
3.1.2. Принцип действия синхронного генератора
3.1.3. Принцип действия синхронного двигателя
3.1.4. Схема включения, статические характеристики и режимы работы синхронного двигателя
3.1.5. Пуск синхронного двигателя
3.1.6. Синхронный двигатель как компенсатор реактивной мощности
3.2. Электропривод с вентильным двигателем
3.
 3. Вентильно-индукторный электропривод
3. Вентильно-индукторный электропривод3.4. Многофункциональный векторный электропривод переменного тока с общим микроконтроллерным ядром
Глава 4. Обзор системы ЭП на базе двигателя постоянного тока
4.1. Краткое описание электропривода с двигателем постоянного тока
4.1.1. Конструкция коллекторных машин
4.1.2. Принцип действия ДПТ
4.2. Бесконтактные двигатели постоянного тока
4.3. Замкнутые схемы управления электропривода с ДПТ с использованием микроконтроллера
4.4. Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков
4.4.1. Принцип действия
4.4.2. Управление БКЭПТ без датчиков
4.5. Методы устранения помех от ходового двигателя и контроллера
Глава 5. Электропривод на основе линейного двигателя
5.1. Конструкция и принцип действия линейного двигателя
5.2. Электропривод с линейным асинхронным двигателем
5.3. Система управления линейным прецизионным электроприводом на базе сигнального процессора
5. 4. Информационное обеспечение систем управления ЛД
4. Информационное обеспечение систем управления ЛД
Глава 6. Микроконтроллерные системы управления электроприводами
6.1. Микроконтроллеры для встраиваемых систем управления электроприводом. Семейство «Motor Control» фирмы Analog Devices
6.1.1. Общая характеристика семейства «Motor Control»
6.1.2. Модуль ШИМ-генератора
6.1.3. Модуль АЦП
6.1.4. Дополнительные периферийные модули
6.1.5. Перспективы развития
6.2. Микроконтроллеры для встраиваемых систем управления электроприводом. Серии «DashDSP»
и «Mixed Signal DSP» фирмы Analog Devices
6.2.1. Общая характеристика семейства «DashDSP»
6.2.3. Модуль АЦП
6.2.4. Дополнительные периферийные устройства
6.2.5. Серия «Mixed Signal DSP»
6.2.6. Отличительные особенности DSP-микроконтроллеров фирмы Analog Devices
6.3. Применение DSP микроконтроллеров
в управлении вентильными двигателями
без датчика положения ротора
6.4. Управление 3-фазными бесщеточными электродвигателями при помощи микроконтроллеров семейства ST7MC компании STMicroelectronics
Глава 7. Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами
Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами
7.1. Семейство 8-разрядных микроконтроллеров AVR
7.1.1. Характеристики AVR-микроконтроллеров
7.2. Микроконтроллер серии С166 фирмы Infenion AG для управления электроприводами
Глава 8. Использование интегрированных схем программируемой логики для управления шаговым двигателем
8.2. Сведения о двигателях серии ДБМ
8.3. Управление двигателем ДБМ
8.4. Составление алгоритма работы блока управления
8.5. Разработка внутренней структуры цифрового блока управления
8.6. Разработка внутренней структуры программно-логической интегральной схемы
Заключение
Список литературы
Скачать с Depositfiles
Понравилась статья? Поделиться с друзьями:
- Назад
- Вперед
mikr_kontr_sist_upr_3f_dvig
МИКРОКОНТРОЛЛЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ТРЕХФАЗНЫМ ДВИГАТЕЛЕМ
Абрамов Сергей г. Оренбург
Оренбург
В настоящее время практически 60 % всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей. Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но в то же самое время подключать их к однофазной сети и управлять частотой вращения достаточно сложно.
Предлагаемая система управления работает от однофазной сети 220вольт и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе. Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц.
 В предлагаемой схеме используется число-импульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц Рис1. позволяющий получать синусоидальный ток на обмотках двигателя. Существует также более перспективный, ШИРОТНО ИМПУЛЬСНЫЙ МЕТОД (ШИМ, PWM – англ.) использующий управление с обратными связями и без них. С частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15-27% по сравнению с питающей сетью т.е. до 354-390 вольт.
В предлагаемой схеме используется число-импульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц Рис1. позволяющий получать синусоидальный ток на обмотках двигателя. Существует также более перспективный, ШИРОТНО ИМПУЛЬСНЫЙ МЕТОД (ШИМ, PWM – англ.) использующий управление с обратными связями и без них. С частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15-27% по сравнению с питающей сетью т.е. до 354-390 вольт.
Рис1.
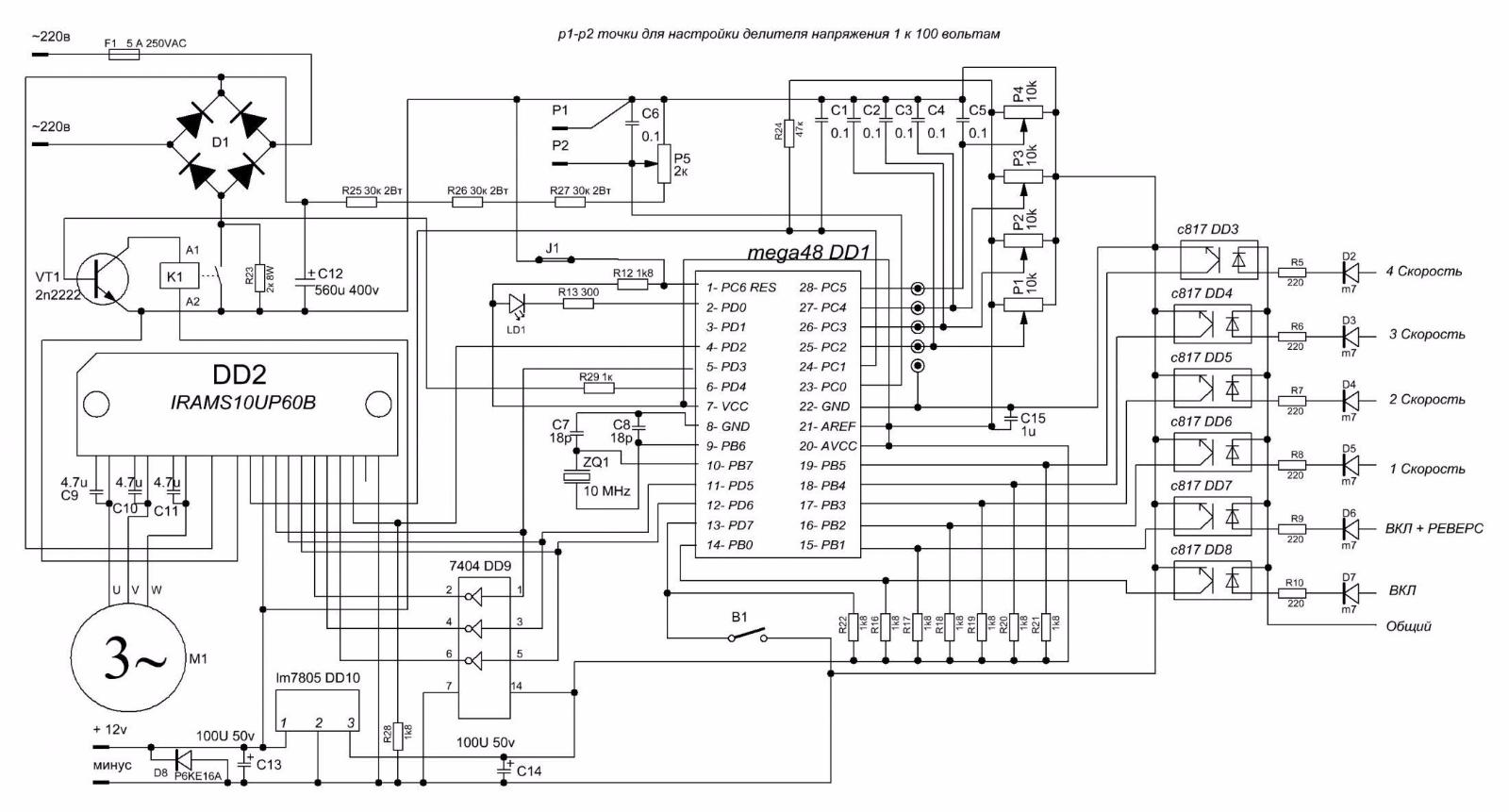
Схема, изображённая на рис2, состоит из управляющего устройства D2, применен микроконтроллер PIC16F628-20/P работающий на частоте 20 мГц, кнопок управления Пуск (SA1), Стоп (SA2), кнопки увеличения и уменьшения частоты соответственно SA3.SA4. Двоично-семисегментного дешифратора D1, светодиодных матриц HG1,HG2. Узла торможения VT9,VT10,K1. В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы INTERNATIONAL RECTIFIER имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.

Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкость C11 предотвращает всплески, которые будут возникать при коммутациях на паразитных индуктивностях схемы. А также маломощного трансформатора T1, стабилизатора напряжения 15 вольт D5 для питания схемы драйвера, и стабилизатора напряжения 5 вольт D3 для питания микроконтроллера и схемы индикации.
рис2.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT транзисторы типа IRGBC20KD2-S, IRGBC30KD2-S при этом диоды VD7-VD10, VD15,VD16 следует выпаять. Конденсатор C11 должен быть типа К78-2 на 600-1000 Вольт. Вместо VD1-VD6 желательно применить сверх быстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2-4,7 микрофарад, которые должны быть рассчитаны на напряжение 50 вольт. Трансформатор T1 мощностью 0,5-2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом диаметром 0,2 и должна выдавать 19-20 вольт.
Трансформатор T1 мощностью 0,5-2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом диаметром 0,2 и должна выдавать 19-20 вольт.
Печатная плата Рис3. выполнена на одностороннем стеклотекстолите, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1,HG2, кнопки SA1-SA4 установлены со стороны дорожек. По вашим просьбам печатная плата в формате PCAD2000 —здесь
Рис3.
HEX формат программы находится в таблице 1. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.
Программа выполнена таким образом что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 секунды, эта константа находится в ячейках 0207 и 0158 таблицы. Если необходимо увеличить скорость нарастания в два раза то вместо кодов 3005 необходимо записать 300A.
Табл1.
:020000040000FA
:02000000EA29EB
:08000800C200030EC3000B1936
:100010000E28430E8300C20E420E09000B308100F1
:100020000B116400230800258A01A1002308002683
:100030008A01A200331842282108A607031C37288A
:100040000630A607A70A2708FA3C03193228220817
:10005000A707031832282708FA3C031C3228031983
:1000600032287228FA30A700A60133147228260815
:10007000FA3C031C3F28031D2728A6012228FA303A
:10008000A6022228A708031960282108A60203183F
:100090004F280630A602A703A708031955282208EF
:1000A000A70203185928A7016428A6080319652880
:1000B0004F28A708031D7228A6080319652872286F
:1000C0002108A60203184F28A60133100030A8000B
:1000D000AA00A730A900AB00AF01B21A7128B2166E
:1000E0007228B212B3189A282108A807031C8F2877
:1000F0000630A807A90A2908FA3C03198A28220809
:10010000A90703188A282908FA3C031C8A2803191E
:100110008A28CA28FA30A900A801B314CA282808D6
:10012000FA3C031C9728031D7F28A8017A28FA307F
:10013000A8027A28A9080319B8282108A8020318D8
:10014000A7280630A802A903A9080319AD28220888
:10015000A9020318B128A901BC28A8080319BD28C1
:10016000A728A908031DCA28A8080319BD28CA285A
:100170002108A8020318A728A801B3100030A60080
:10018000AA00A730A700AB00B001321BC928321764
:10019000CA2832133319F2282108AA07031CE728BA
:1001A0000630AA07AB0A2B08FA3C0319E2282208FA
:1001B000AB070318E2282B08FA3C031CE2280319BA
:1001C000E2282229FA30AB00AA01331522292A0895
:1001D000FA3C031CEF28031DD728AA01D228FA30C5
:1001E000AA02D228AB08031910292108AA02031871
:1001F000FF280630AA02AB03AB0803190529220821
:10020000AB0203180929AB011429AA0803191529FF
:10021000FF28AB08031D2229AA0803191529222942
:100220002108AA020318FF28AA0133110030A600F2
:10023000A800A730A700A900B101B21B2129B2175D
:100240002229B213B21C3529851E922906083F388F
:100250008600B21A9621B21EA421321BB221321F8F
:10026000C021B21BCE21B21FDC21B70B7A2964302A
:10027000B700321A75290613850105140000000025
:1002800000000000051AB21485018514000000006A
:1002900000000000051A7B29B908031D5B2923080B
:1002A000200203195C29031C5729A30A5829A30318
:1002B0000530B9005C29B903B80B70293230B80099
:1002C000850105150000000000000000051A321528
:1002D000850185150000000000000000051AB21518
:1002E00034088500861732167A298613350885006A
:1002F0000617321209283F308604B2100130A300DD
:1003000006178617FF30BB00FF30BA003C30BC0038
:100310006400BB0B8C29BA0B8829BC0B88290613F7
:1003200086134C29B2103F30860435292708F03C4B
:10033000031CA029270800248A01AF07031CA22957
:1003400006100800061408002708F03C031CAE291C
:10035000270800248A01AF07031CB0298611080072
:10036000861508002908F03C031CBC292908002434
:100370008A01B007031CBE298610080086140800F5
:100380002908F03C031CCA29290800248A01B00767
:10039000031CCC2906120800061608002B08F03CA6
:1003A000031CD8292B0800248A01B107031CDA2971
:1003B00006110800061508002B08F03C031CE6296E
:1003C0002B0800248A01B107031CE82986120800C3
:1003D0008616080083120313850107309F003F3003
:1003E00086000B308100831603139F138030810039
:1003F0003030850000308600A0308B00831203135C
:10040000A0144F30840080018403A018032A053013
:10041000B9000130A3002030B2000230B300003038
:10042000A600A800A730A700A9006430B7003230AA
:10043000B80000305622A000362264003219232270
:10044000B2192A221D2A63302002031DA00A362277
:100450003211302A01302002031DA0033622B211CE
:100460002008C100003042226400080020088B13DD
:1004700000238A018B17B6000F39B400360E0F39EE
:10048000B50008008B13831603139B00831203131C
:100490004108831603139A001C1555309D00AA309D
:1004A0009D009C14831203138B1708008B13831673
:1004B00003139B001C141A08831203138B170800E4
:100600000A148A1482070034013402340334043497
:1006100005340634073408340934103411341234E4
:100620001334143415341634173418341934203470
:1006300021342234233424342534263427342834F6
:10064000293430343134323433343434353436347C
:100650003734383439344034413442344334443408
:100660004534463447344834493450345134523494
:100670005334543455345634573458345934603420
:1006800061346234633464346534663467346834A6
:10069000693470347134723473347434753476342C
:1006A00077347834793480348134823483348434B8
:1006B0008534863487348834893490349134923444
:0E06C0009334943495349634973498349934A6
:100800000A158207003402340334053406340834F0
:100810000A340B340D340E341034123413341534BE
:10082000163418341A341B341D341E342034223448
:1008300023342534263428342A342B342D342E34D2
:1008400030343234333435343634383439343B345C
:100850003D343E34403441344334443446344734E8
:1008600049344B344C344E344F3451345234543474
:100870005534573458345A345B345D345E34603404
:100880006134633464346634673469346A346C3494
:100890006D346E3470347134733474347634773428
:1008A00079347A347B347D347E34803481348234BC
:1008B000843485348634883489348B348C348D3454
:1008C0008F349034913493349434953496349834EE
:1008D00099349A349C349D349E349F34A134A2348C
:1008E000A334A434A634A734A834A934AA34AC342D
:1008F000AD34AE34AF34B034B234B334B434B534D0
:10090000B634B734B834BA34BB34BC34BD34BE3476
:10091000BF34C034C134C234C334C434C534C63423
:10092000C734C834C934CA34CB34CC34CD34CE34D3
:10093000CF34D034D134D234D334D434D534D63483
:10094000D634D734D834D934DA34DB34DC34DC343C
:10095000DD34DE34DF34E034E034E134E234E334F7
:10096000E334E434E534E634E634E734E834E834B8
:10097000E934EA34EA34EB34EC34EC34ED34ED347D
:10098000EE34EF34EF34F034F034F134F134F23447
:10099000F234F334F334F434F434F534F534F63417
:1009A000F634F734F734F834F834F834F934F934E9
:1009B000F934FA34FA34FB34FB34FB34FB34FC34C2
:1009C000FC34FC34FD34FD34FD34FD34FE34FE349F
:1009D000FE34FE34FE34FF34FF34FF34FF34FF3482
:0609E000FF34FF34FF3478
:100A00000A140A1582070034193432344B34643422
:100A10007D349634AF34C834E13400341934323480
:100A20004B3464347D349634AF34C834E13400340C
:100A3000193432344B3464347D349634AF34C83492
:100A4000E1340034193432344B3464347D34963418
:100A5000AF34C834E1340034193432344B346434A4
:100A60007D349634AF34C834E13400341934323430
:100A70004B3464347D349634AF34C834E1340034BC
:100A8000193432344B3464347D349634AF34C83442
:100A9000E1340034193432344B3464347D349634C8
:100AA000AF34C834E1340034193432344B34643454
:100AB0007D349634AF34C834E134003419343234E0
:0E0AC0004B3464347D349634AF34C834E134A2
:100C00008A140A158207003400340034003400349A
:100C10000034003400340034003401340134013431
:100C2000013401340134013401340134013402341B
:100C30000234023402340234023402340234023404
:100C400002340334033403340334033403340334ED
:100C500003340334033404340434043404340434D7
:100C600004340434043404340434053405340534C1
:100C700005340534053405340534053405340634AB
:100C80000634063406340634063406340634063494
:100C9000063407340734073407340734073407347D
:100CA0000734073407340834083408340834083467
:100CB0000834083408340834083409340934093451
:0E0CC00009340934093409340934093409347B
:02400E00463F2B
:00000001FF
Если Вы решили повторить конструкцию, то повторяю для устойчивой работы двигателя настоятельно рекомендую переписать программу. С прошивкой которая приведена в статье двигатель крутиться будет но мощность на валу будет маленькая. (Посмотреть демонстрационный ролик-1,9мв) Необходимо написать новую программу не с число-импульсной, а с ШИМ-модуляцией. И для этого желательно использовать более мощный процессор с 6-ШИМ модулями, что нибудь из разряда PIC18Fxxxx и хорошо подумать над программой.
С прошивкой которая приведена в статье двигатель крутиться будет но мощность на валу будет маленькая. (Посмотреть демонстрационный ролик-1,9мв) Необходимо написать новую программу не с число-импульсной, а с ШИМ-модуляцией. И для этого желательно использовать более мощный процессор с 6-ШИМ модулями, что нибудь из разряда PIC18Fxxxx и хорошо подумать над программой.
Наверное все же придется выложить исходник на сайт так как слишком много просьб поступило. Хотя я писал что как рабочая эта программа не подойдет, ее надо переделывать. Эта работа достаточно сложная и так просто ее не сделать, необходимо учитывать массу факторов, ну например в зависимости от нагрузки на валу в процессе вращения менять ширину импульсов, то есть необходим достаточно мощный процессор, или сразу делать двухпроцессорную систему один обсчитывает второй управляет. Мою схему можно без проблем использовать в управлении 3х фазным двигателем который может работать от прямоугольных импульсов.
Текс программы на ассемблере для MPLAB
ЛИТЕРАТУРА:
В. Козаченко, Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам, CipNews №1-99г.
Д. Обухов, С. Стенин, Д. Струнин, А. Фрадкин, Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131 , CipNews №6-99г.
Скачать файлы
Разработка и внедрение схемы управления скоростью на основе микроконтроллера для однофазного асинхронного двигателя Ришаб Бабар, Омкар Чанданвар, Саураб Канде, профессор Манджуша Патил :: SSRN
Скачать эту статью
Открыть PDF в браузере
 ssrn.com» data-abstract-auth=»false»/>
Добавить бумагу в мою библиотеку
ssrn.com» data-abstract-auth=»false»/>
Добавить бумагу в мою библиотеку
Делиться:
5 страниц Опубликовано: 22 июля 2019 г. Последняя редакция: 30 сентября 2019 г.
Просмотреть все статьи Ришаба Бабара
Технологический и исследовательский институт им. Бхиврабая Саванта JSPM (BSIOTR)
Технологический и исследовательский институт им. Бхиврабая Саванта (BSIOTR) JSPM
Технологический и исследовательский институт им. Бхиврабая Саванта (BSIOTR) JSPM
Технологический и исследовательский институт им. 18, 2019
Abstract
В этой статье представлен простой способ разработки недорогого привода однофазного асинхронного двигателя на основе микроконтроллера. Этот контроллер предназначен для управления асинхронным двигателем с любой желаемой скоростью и при любой нагрузке в пределах его номинального значения. Используется микроконтроллер ATMEG328P. В данной работе предлагается схема управления скоростью однофазного асинхронного двигателя с использованием датчиков Холла. Датчики Холла определяют положение ротора и управляют двигателем с помощью схемы управления тиристором на основе микроконтроллера, которая используется для управления скоростью асинхронного двигателя. Основная цель состоит в том, чтобы обеспечить замкнутую обратную связь от датчика Холла к контроллеру. Схема симистора используется для изменения выходного сигнала в соответствии с сигналом контроллера. Реакция скорости и оценка производительности были проверены при различных скоростях и внешних помехах.
Используется микроконтроллер ATMEG328P. В данной работе предлагается схема управления скоростью однофазного асинхронного двигателя с использованием датчиков Холла. Датчики Холла определяют положение ротора и управляют двигателем с помощью схемы управления тиристором на основе микроконтроллера, которая используется для управления скоростью асинхронного двигателя. Основная цель состоит в том, чтобы обеспечить замкнутую обратную связь от датчика Холла к контроллеру. Схема симистора используется для изменения выходного сигнала в соответствии с сигналом контроллера. Реакция скорости и оценка производительности были проверены при различных скоростях и внешних помехах.
Ключевые слова: Асинхронный двигатель, микроконтроллер, симисторная схема, датчик Холла
Классификация JEL: Y60
Рекомендуемое цитирование: Рекомендуемая ссылка
Бабар, Ришаб и Чанданвар, Омкар и Канде, Саураб и Патил, профессор Манджуша, Проектирование и внедрение схемы управления скоростью на основе микроконтроллера для однофазного асинхронного двигателя (18 мая 2019 г. )). Материалы Международной конференции по коммуникации и обработке информации (ICCIP) 2019 г., доступно на SSRN: https://ssrn.com/abstract=3423392 или http://dx.doi.org/10.2139/ssrn.3423392
)). Материалы Международной конференции по коммуникации и обработке информации (ICCIP) 2019 г., доступно на SSRN: https://ssrn.com/abstract=3423392 или http://dx.doi.org/10.2139/ssrn.3423392
У вас есть вакансия, которую вы хотели бы рекламировать в SSRN?
Похожие электронные журналы
Обратная связь
Обратная связь с SSRN
Обратная связь (необходимый)
Электронная почта (необходимый)
Если вам нужна немедленная помощь, позвоните по номеру 877-SSRNHelp (877 777 6435) в США или +1 212 448 2500 за пределами США с 8:30 до 18:00 по восточному поясному времени США, с понедельника по пятницу.
ШИМ-инвертор на основе микроконтроллера для управления скоростью трехфазного асинхронного двигателя
- Идентификатор корпуса: 15533867
title={ШИМ-инвертор на основе микроконтроллера для управления скоростью трехфазного асинхронного двигателя},
автор = {Мохд Фарук Абдул Латиф и М.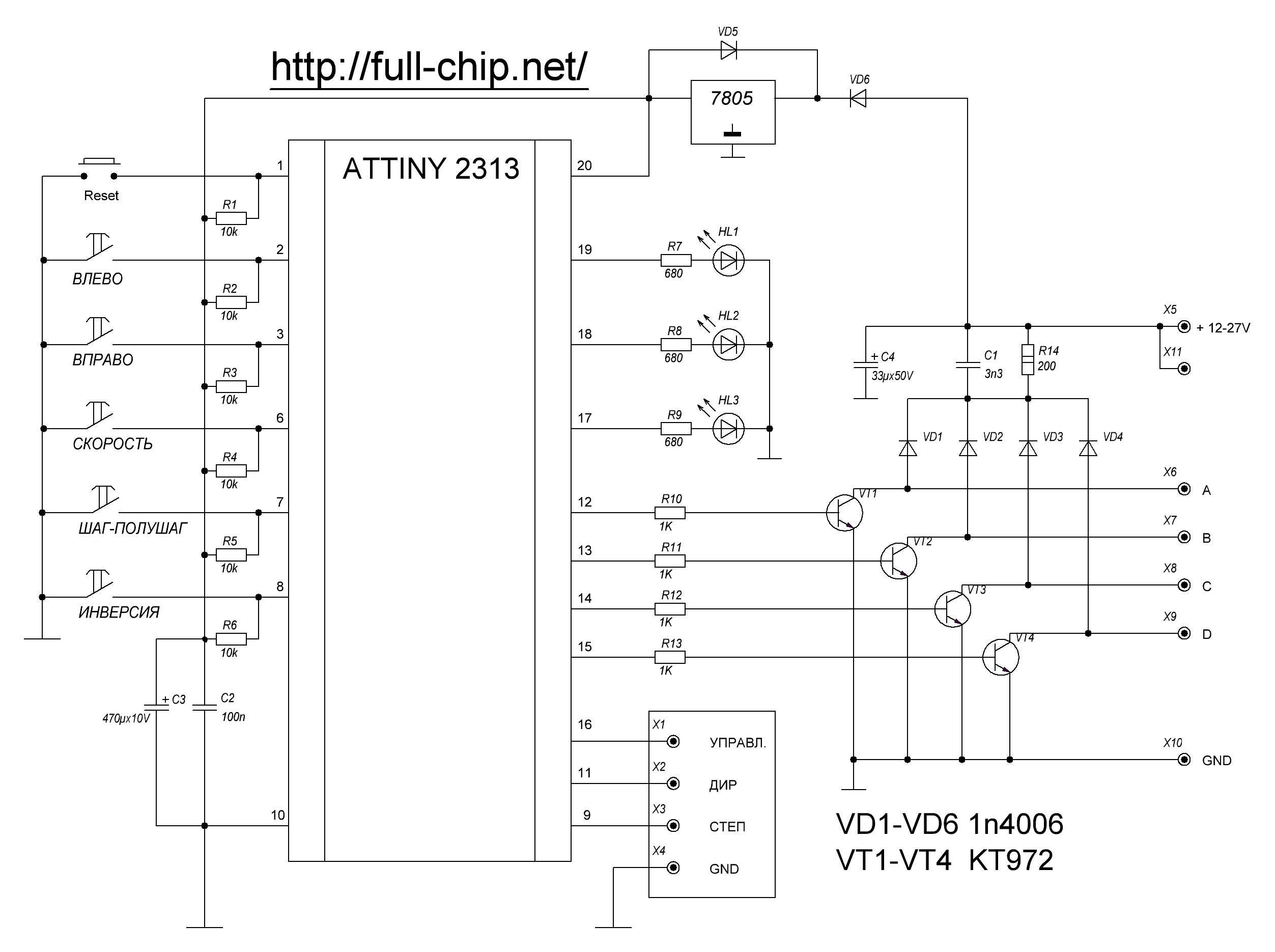 Дж. Алам, Мохд Абдур Рашид и Альтахер Аббас А. Карим и Нур Хафеизза Рамли и Исмаил Даут},
год = {2013}
}
Дж. Алам, Мохд Абдур Рашид и Альтахер Аббас А. Карим и Нур Хафеизза Рамли и Исмаил Даут},
год = {2013}
} - М. А. Латиф, М. Дж. Алам, И. Даут
- Опубликовано в 2013 г.
- Машиностроение
Трехфазный асинхронный двигатель за более чем 100 лет зарекомендовал себя как чрезвычайно надежное электромеханическое устройство преобразования энергии. Управление скоростью асинхронного двигателя является острой необходимостью для реальных промышленных приложений. Однако существует так много вариантов точного управления скоростью асинхронного двигателя, за исключением изменения частоты. Поэтому для достижения цели управления скоростью асинхронного двигателя нет альтернативы инверторам. При наличии высокой скорости…
dspace.unimap.edu.my
Пространственно-векторная широтно-импульсная модуляция на основе микроконтроллера Управление скоростью трехфазного асинхронного двигателя
- Milton T. Richardson, Venardo Patterson, Aldwayne Parchment
Engineering
9 0004 Юго-Восточная Конференция 2021- 2021
Трехфазные асинхронные двигатели часто классифицируются как двигатели почти с постоянной скоростью из-за скольжения менее 5%, которым ограничивается их нормальная работа, и может быть сложно изменить скорость…
МОДЕЛИРОВАНИЕ И РЕАЛИЗАЦИЯ ПРИВОДА АИНХРАННОГО ДВИГАТЕЛЯ С ФЕДЕРАТОРОМ ШИМ-ИНВЕРТОРА
- П.
 Рамешкумар, Дж. Патель
Рамешкумар, Дж. Патель Инженерное дело
- 2015
В этой диссертации представлена необходимость управления скоростью в асинхронных двигателях. Из различных методов управления асинхронными двигателями V/f-управление оказалось наиболее универсальным. Общая схема…
ШИМ-инвертор с цифровым микроконтроллером для приложений управления скоростью
- F. A. Jumaa, Mohanad Aljanabi, Ahmed Hussein Duhis, J. Abed
Engineering
- 2021
В этом документе соблюдаются несколько рекомендаций по выбору метода, подходящего для применения при заданном уровне мощности, частоте переключения и динамический отклик.
Анализ выходного напряжения трехфазного инвертора с использованием Simulink Matlab
- Доктор Манджеш
Engineering
- 2015
В документе предлагается три этапа топологии инвертера.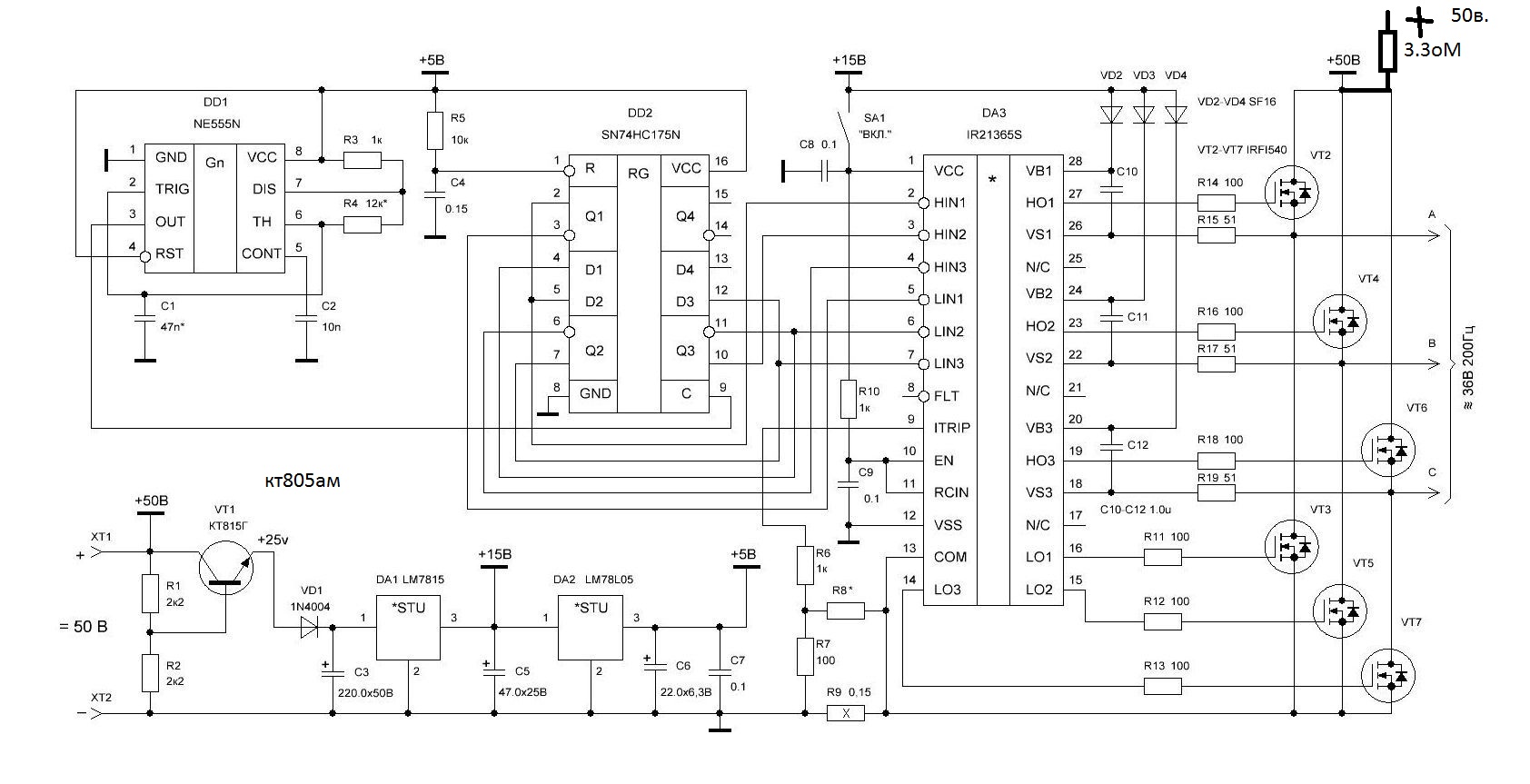 В большинстве приложений выходное напряжение, создаваемое трехфазным инвертором, недостаточно для управления нагрузкой. Нагрузка требует более высокого напряжения…
В большинстве приложений выходное напряжение, создаваемое трехфазным инвертором, недостаточно для управления нагрузкой. Нагрузка требует более высокого напряжения…
Трехфазный инвертор источника напряжения для улучшения гармоник с использованием микроконтроллера и моделирования в MATLAB
- Д. О. Сакле, Г. Кулкарни, Д. Хадсе
Инженерное дело
- 2014
— В данной статье представлен трехфазный инвертор с синусоидальным Схема переключения широтно-импульсной модуляции. Синусоидальная схема широтно-импульсной модуляции используется в качестве коммутационного импульса для включения и выключения…
Разработка прямоугольного инвертора с использованием повышающего преобразователя DC/DC
Предлагается альтернативная топология инвертора по сравнению с существующими топологиями, доступными на рынке, и создается ступенчатая прямоугольная форма выходного напряжения за счет надлежащего управления двумя повышающими преобразователями.
Подавление гармоник и THD с помощью трехуровневого инвертора с фильтром C-типа на выходе инвертора с использованием Simulink/MATLAB
- Manjesh, B. Rajesh
Engineering
- 2018
Анализ всего В работе проведены гармонические искажения и величина гармоник на выходе трехфазного инверторного привода.
Виртуальное моделирование и сравнение драйверов ширины синусоидального импульса и модуляции синусоидального рабочего цикла для однофазных инверторов мощности 17
По результатам хорошо протестированных систем прототипирования , инвертор на основе SDCM в большинстве случаев предлагает более интеллектуальные рабочие характеристики и лучшую общую производительность по сравнению с инвертором на основе SPWM.
Система асинхронного двигателя для модернизации полипа крана
- Уяр О.
 , Алтун Х., Тунабойлу Н.С.
, Алтун Х., Тунабойлу Н.С. Машиностроение
Материалы 6-й Международной конференции по электронике, вычислительной технике и искусственному интеллекту (ECAI) 2014 г.
- 2014 9 0017
В данной статье представлен программируемый контроллер для асинхронный двигатель (7,5 кВт) в гидронасосе крана полип. Полип крана управляется с помощью беспроводного джойстика рядом с проводным.
РЕГУЛИРОВАНИЕ СКОРОСТИ ТРЕХФАЗНОГО АИНХРАННОГО ДВИГАТЕЛЯ С ПОМОЩЬЮ ШИМ-ПРЕОБРАЗОВАТЕЛЯ
- Патель Дж., Кубават А.М., Джхала М.Б. (Powersim), производительность стратегии вольт на герц были оценены с помощью моделирования, показанного в результатах.
Анализ инверторов с дельта-модуляцией для применения в погружных двигателях
- М. А. Чоудхури
Инженерия
- 1988
В данной диссертации представлен анализ инверторов с дельта-модуляцией и их применения в погружных двигателях.
 Погружные двигатели представляют собой асинхронные двигатели с уникальными конструктивными особенностями. Эти двигатели…
Погружные двигатели представляют собой асинхронные двигатели с уникальными конструктивными особенностями. Эти двигатели…Современная силовая электроника
Приводы с регулируемой скоростью Курс самообучения Уэйна Л. Стеббинса, опубликовано IEEE, Пискатауэй, Нью-Джерси. Высокий спрос на системы привода с регулируемой скоростью (ASD) в коммунальном, промышленном и коммерческом секторах…
Стратегия трехфазной ШИМ с использованием ступенчатой опорной волны (инверторные приводы)
- Дж. Салмон, С. Олсен, Н. Дердл
Инженерное дело
- 1991
Теоретический вывод несущей на основе трех Представлен метод фазовой широтно-импульсной модуляции (ШИМ) для инверторных приводов, использующий ступенчатую форму опорного сигнала. Опорный сигнал разделен…
Основы электрических машин и силовой электроники
- P. Sen
Машиностроение
- 1989
Магнитные цепи.