Регулирование частоты вращения асинхронного двигателя
Регулирование частоты вращения асинхронного двигателя определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых он используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя nmах к его минимальной частоте вращения nmin:
D=nmax/nmin. (54)
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
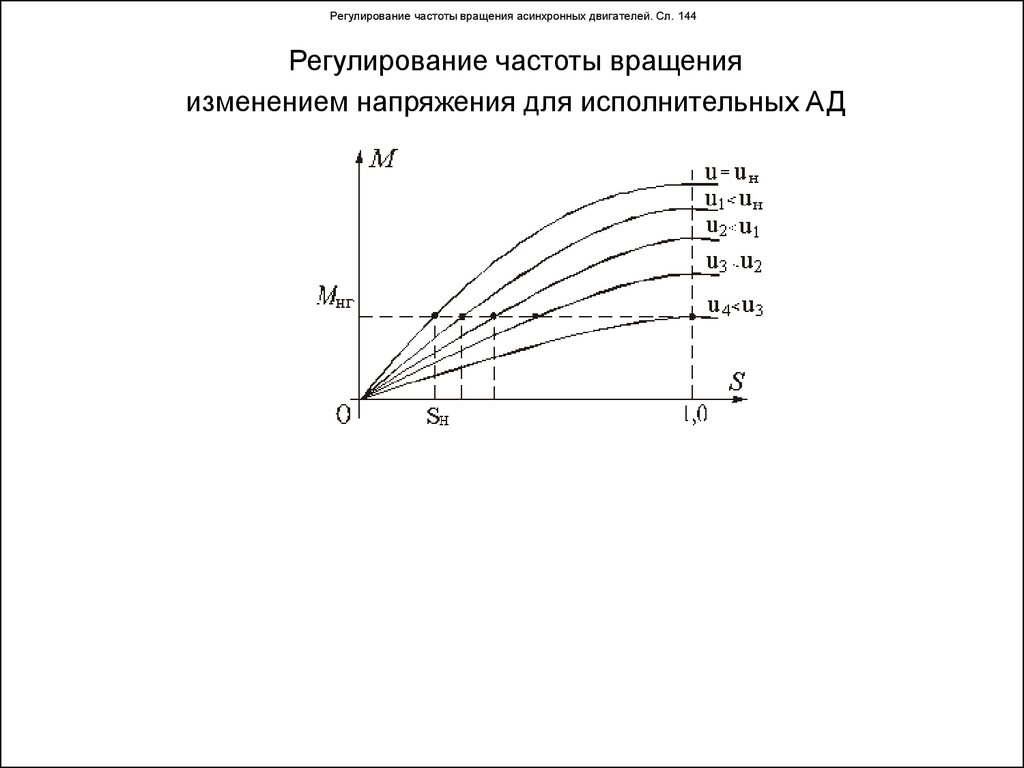
Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) асинхронный двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях.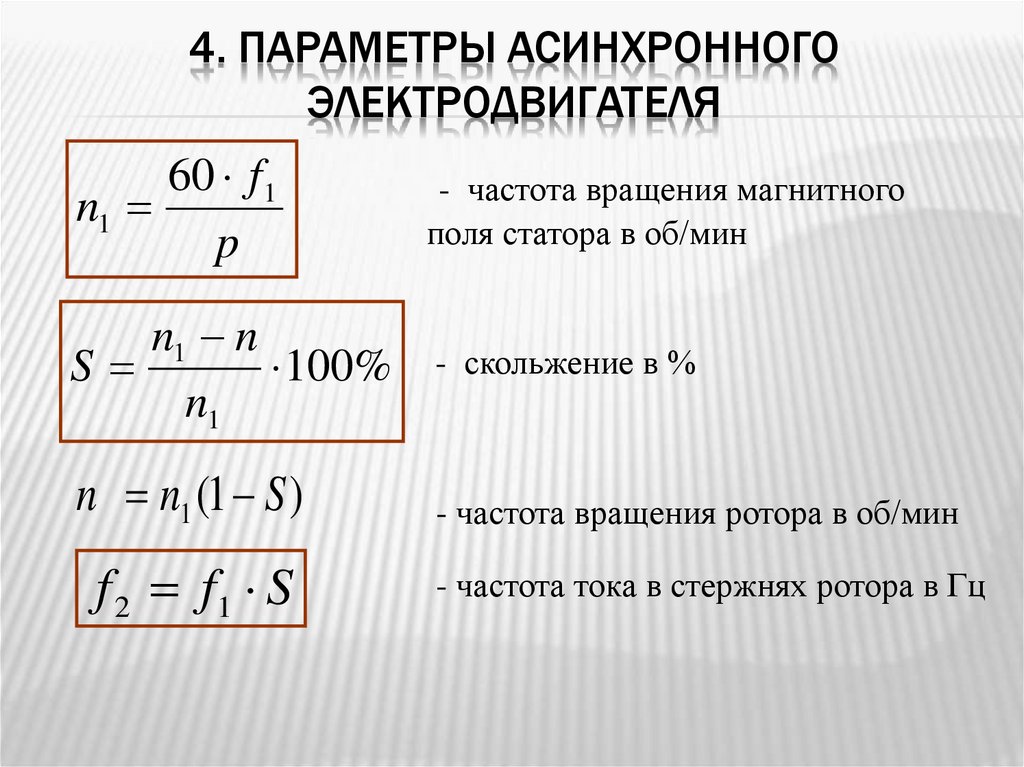 Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронного двигателя может производиться способом воздействия на него со стороны статора или со стороны ротора.
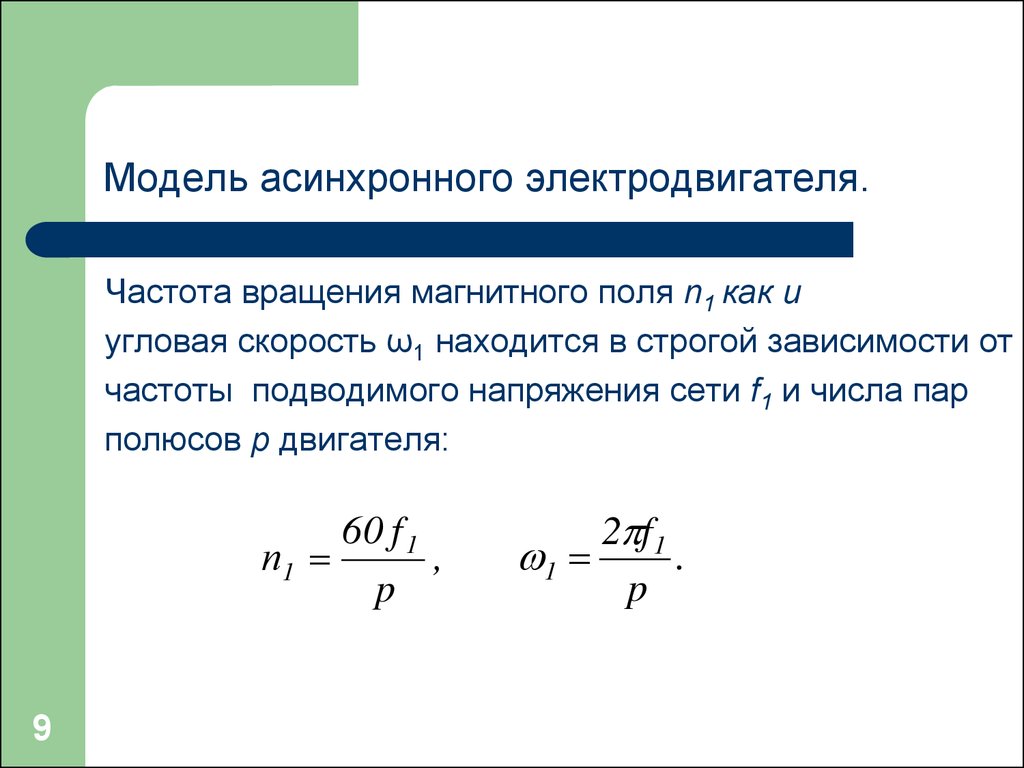
Чтобы рассмотреть возможные способы регулирования частоты вращения, сначала получим ее выражение. В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
(55)
где f1 — частота питающей сети, Гц; р — число пар полюсов двигателя; s — скольжение, отн. ед.
Из формулы (55) следует, что существуют три основных способа регулирования частоты вращения:
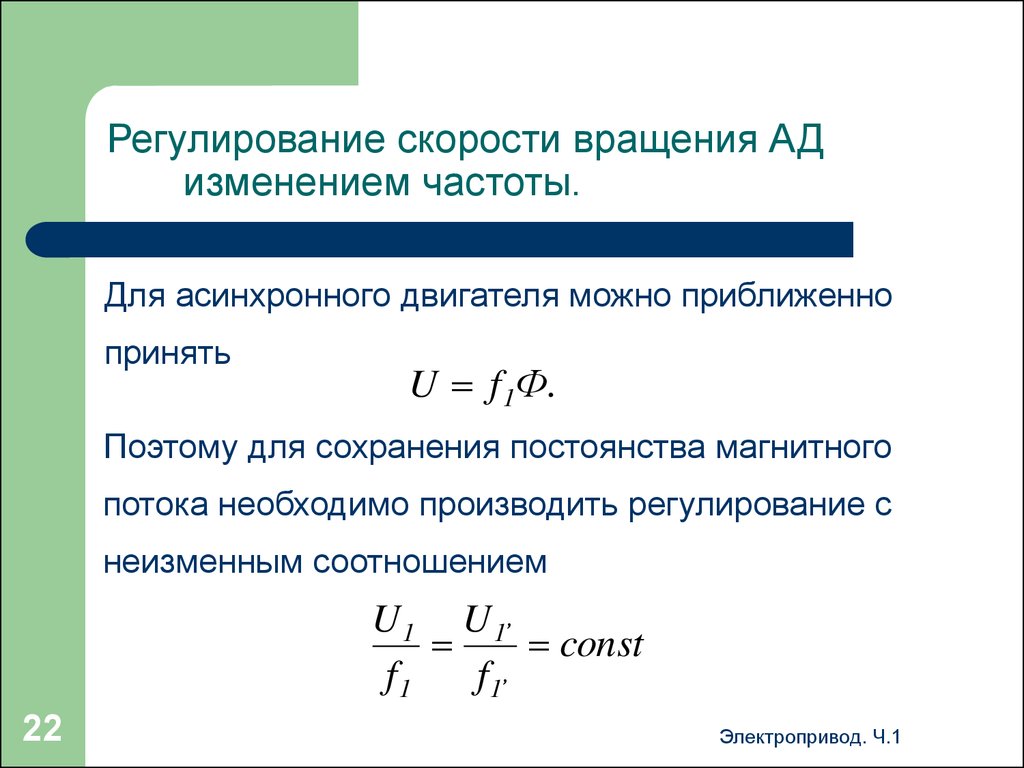
- изменением частоты f1 питающего двигатель напряжения;
- изменением числа пар полюсов р;
- изменением скольжения s.
Воздействие на асинхронный двигатель может осуществляться как со стороны статора, так и со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Белорусский государственный университет транспорта — БелГУТ (БИИЖТ)
Запись доноров крови
Регистрация на «Что? Где? Когда?»
Регистрация на конференцию «Феноменология транспорта
в литературе и искусстве: прошлое, настоящее, будущее»
Как поступить в БелГУТ
Как получить место
в общежитии БелГУТа
Как поступить иностранному гражданину
События
Все события
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
|---|---|---|---|---|---|---|
1 | 2 | |||||
3 | 4 | 5 | 6 Дата : 2023-04-06 | 7 Дата : 2023-04-07 | 8 | 9 |
10 | 11 | 12 | 13 | 14 | 15 | 16 |
17 Дата : 2023-04-17 | 18 | 19 | 20 Дата : 2023-04-20 | 21 | 22 | 23 |
24 | 25 | 26 Дата : 2023-04-26 | 27 | 28 | 29 | 30 |
Все анонсы
- Фестиваль военно-патриотической песни среди иностр.
 ..
.. - План приема, порядок приема, документы — вступител…
- Открытая лекция по дисциплине «Конструкция, теория…
- Профком студентов предлагает запись в бассейн…
- Билеты в театр
- Билеты на спектакли Гомельского городского молодеж…
- Новое расписание звонков
- 43-й рыцарский турнир «За прекрасных дам!»…
- Неделя русского языка
- ПРЯМОЙ ЭФИР. Послание Президента Беларуси Александ…
Анонсы
Университет
Абитуриентам
Студентам
Конференции
Приглашения
Фестиваль военно-патриотической песни среди иностр…
План приема, порядок приема, документы — вступител…
Открытая лекция по дисциплине «Конструкция, теория…
Профком студентов предлагает запись в бассейн…
Новости
Университет
Международные связи
Спорт
ИВР
Жизнь студентов
Новости подразделений
- Студенческая жизнь
XLIII рыцарский турнир «За прекрасных дам». ..
..
06 апреля 2023
- Университет
Конкурс презентаций «Похвальное слово русскому языку»…
05 апреля 2023
- Университет
Репортаж о визите шри-ланкийской делегации…
05 апреля 2023
- Студенческая жизнь
Второй тур весенней серии «Что? Где? Когда?» для студентов…
05 апреля 2023
- Университет
Познакомил и подружил нас русский язык…
04 апреля 2023
- Воспитательная работа
Встреча с Русским домом в Гомеле
04 апреля 2023
- Университет
Конкурс эссе «Русский язык – объединяющая сила». ..
..
04 апреля 2023
- Университет
Повышение эффективности технологии автоматизации в проектировании желе…
04 апреля 2023
- Воспитательная работа
Встреча студентов с ректором в студгородке…
04 апреля 2023
Другие новости
- БелГУТ дает старт проекту «Живая память благодарных поколений»…
- Открытие недели русского языка «Русский язык – язык мира, дружбы и сот…
- Братский союз народов (выставка ко Дню единения народов Беларуси и Рос…
- Русский дом в Гомеле представил выставку о Петре Первом…
- Лучший бомбардир — Кудрявцев Алексей Владимирович…
- БелГУТ представляет проект «Ты не один, МЧС с тобой»…
- Отклик БелГУТа на Послание Главы государства…
- Игра-загадка «Обыкновенная необыкновенная классика».
- День единения народов Беларуси и России…
- Новый выпуск международного сборника научных трудов «Механика. Исследо…
- Делегация из Шри-Ланки
БелГУТ на Доске почета
Достижения университета
КУДА ПОСТУПАТЬ
Все факультеты
Предложения
Все предложения
Видеотека
Все видео
Фотогалерея
Все фото
Максимальная и минимальная скорость ЧРП
ЧРП позволяет точно регулировать скорость асинхронного двигателя переменного тока, создавая возможности для повышения эффективности, снижения износа двигателя и снижения эксплуатационных расходов. Однако, хотя частотно-регулируемые приводы чрезвычайно полезны, существует несколько распространенных заблуждений относительно максимальной и минимальной скорости, которую они могут обеспечить в практических реальных приложениях.
Как работает ЧРП? В отличие от двигателей постоянного тока, скорость двигателя переменного тока нельзя контролировать путем изменения входного напряжения. Вместо этого необходимо изменить частоту сети переменного тока, которая определяет скорость вращающегося электромагнитного поля в двигателе, вращающем вал ротора.
Вместо этого необходимо изменить частоту сети переменного тока, которая определяет скорость вращающегося электромагнитного поля в двигателе, вращающем вал ротора.
ЧРП (или частотно-регулируемый привод) достигает этого путем преобразования мощности переменного тока в постоянный. Затем ЧРП посылает импульс постоянного тока, который действует как синусоидальная волна переменного тока для управления интенсивностью. Операторы могут выбрать желаемую выходную частоту для управления скоростью двигателя.
Существует два основных типа частотно-регулируемых приводов. Частотно-регулируемые приводы напряжение/герц являются наиболее распространенными и экономичными. Они контролируют скорость двигателя, управляя соотношением между напряжением и частотой, чтобы обеспечить управление скоростью, особенно вокруг базовой скорости двигателя. Преобразователи частоты с векторным управлением более сложны и дороги, но обеспечивают очень точное управление скоростью двигателя во всем диапазоне скоростей, даже обеспечивая полный крутящий момент при нулевой скорости (удерживающий крутящий момент). Частотно-регулируемые приводы обычно поставляются с диапазоном частот, который определяет диапазон скорости, который они могут обеспечить.
Частотно-регулируемые приводы обычно поставляются с диапазоном частот, который определяет диапазон скорости, который они могут обеспечить.
Несмотря на то, что частотно-регулируемые приводы обеспечивают большие преимущества, существуют практические ограничения минимальной и максимальной скорости, при которой двигатель может безопасно работать.
Плавный пускКогда на остановленный электродвигатель подается полная мощность, результирующий скачок тока может повредить двигатель и электронику, а внезапные нагрузки крутящего момента могут повредить подшипники, шкивы и механические компоненты. По этой причине рекомендуется увеличивать скорость постепенно, и для обеспечения этой возможности часто используется частотно-регулируемый привод.
Поскольку во время плавного пуска обычно нет необходимости в точном контроле скорости, при выборе и использовании частотно-регулируемого привода для плавного пуска электродвигателя следует учитывать несколько дополнительных соображений.
Обзор устройств плавного пуска
Минимальная скоростьЧРП позволяют электродвигателю работать на скорости ниже его базовой скорости, а ЧРП с векторным управлением могут даже позволить двигателю обеспечивать удерживающий крутящий момент в состоянии покоя. Однако, особенно для двигателей TEFC (полностью закрытый с вентиляторным охлаждением), где охлаждающий вентилятор установлен на валу двигателя, охлаждение двигателя пропорционально скорости двигателя, и охлаждение уменьшается, когда двигатель замедляется. Особенно при работе с полным крутящим моментом на низких скоростях в двигателе может быстро накапливаться тепловая нагрузка, которая со временем резко сокращает срок его службы и увеличивает затраты на ремонт и замену.
Вообще говоря, двигатели TEFC не предназначены для работы в диапазоне скоростей менее 4:1, в то время как некоторые производители изготавливают двигатели с диапазоном скоростей 10:1 или 20:1. Чаще всего для более медленной работы двигателя требуется дополнительная система охлаждения. Этот порог может быть выше в зависимости от крутящего момента двигателя. Многие производители предоставляют данные о взаимосвязи между эффективностью охлаждения и рабочей скоростью своих двигателей, что позволяет точно рассчитать приемлемую минимальную скорость. Всегда проверяйте пакет данных производителя, если ваш динамический диапазон превышает соотношение 4:1 или 15 Гц.
Чаще всего для более медленной работы двигателя требуется дополнительная система охлаждения. Этот порог может быть выше в зависимости от крутящего момента двигателя. Многие производители предоставляют данные о взаимосвязи между эффективностью охлаждения и рабочей скоростью своих двигателей, что позволяет точно рассчитать приемлемую минимальную скорость. Всегда проверяйте пакет данных производителя, если ваш динамический диапазон превышает соотношение 4:1 или 15 Гц.
При выборе частотно-регулируемого привода для двигателя, который вы собираетесь использовать на низких скоростях, убедитесь, что он может обеспечить требуемую частоту с плавным и чистым выходным сигналом. Для приложений с очень низкими скоростями или удерживающим моментом потребуется привод с векторным управлением или аналогичный.
Максимальная скорость ЧРП имеют верхний предел частоты, которую они могут обеспечить двигателю, что часто обеспечивает скорость, значительно превышающую базовую скорость двигателя. Однако то, что более высокая скорость достижима, не означает, что это практично. Большинство двигателей создают постоянную мощность или CT только при превышении скорости. Это приводит к потере крутящего момента, а работающий вентилятор или насос может сильно перегрузить двигатель. Всегда проверяйте требования к крутящему моменту и рассчитывайте крутящий момент двигателя при превышении скорости двигателя выше 60 Гц.
Однако то, что более высокая скорость достижима, не означает, что это практично. Большинство двигателей создают постоянную мощность или CT только при превышении скорости. Это приводит к потере крутящего момента, а работающий вентилятор или насос может сильно перегрузить двигатель. Всегда проверяйте требования к крутящему моменту и рассчитывайте крутящий момент двигателя при превышении скорости двигателя выше 60 Гц.
Когда ротор двигателя не идеально сбалансирован, возникает вибрация, пропорциональная скорости двигателя. На практике роторы никогда не могут быть идеально сбалансированы из-за производственных ограничений и допусков. При работе двигателя на 50% быстрее базовой скорости это может стать серьезной проблемой. Вибрация увеличивает механическую и тепловую нагрузку на двигатель, редуктор и подшипники и может существенно повлиять на срок службы компонентов моторного привода. Всегда следите за тем, чтобы вибрация находилась в допустимых пределах, чтобы избежать высоких затрат на техническое обслуживание и ремонт.
Существуют и другие электрические и механические ограничения максимальной скорости, которую может развить электродвигатель. На высоких скоростях трение в подшипниках и нагрузка на вентилятор увеличиваются, что снижает КПД двигателя и увеличивает требования к мощности и эксплуатационные расходы. Кроме того, поскольку двигатель создает напряжение обратной ЭДС, пропорциональное скорости двигателя, напряжение, необходимое для достижения более высоких скоростей при сохранении крутящего момента, увеличивается, что в конечном итоге превышает то, что может обеспечить ЧРП. Полный анализ требуемых рабочих характеристик приложения необходим, чтобы определить, могут ли двигатель и электроника работать.
Для двигателей высокой мощности с базовой скоростью 3600 об/мин и выше правила NEMA (MG1) запрещают превышение скорости в целях обеспечения безопасности и предотвращения несчастных случаев. Ознакомьтесь с национальными и местными нормами безопасности, чтобы убедиться, что вы можете превысить скорость двигателя, оставаясь при этом в соответствии с требованиями.
Просмотреть все ЧРП
РезюмеЧРП невероятно полезны и позволяют операторам точно настраивать скорость своих электродвигателей для повышения эффективности, снижения затрат и получения большей отдачи от своих двигателей. Тем не менее, это помогает понять практические пределы, определяющие минимальную и максимальную скорость, в которых может безопасно работать электродвигатель.
eMotors Direct предлагает широкий спектр регуляторов скорости двигателя, которые позволяют точно управлять электродвигателями, приводами и аксессуарами для любого бюджета и области применения.
Есть вопросы? Свяжитесь с нашими экспертами.
Свяжитесь с нашей командой экспертов по электронной почте или телефону.
1-800-890-7593
[email protected]
Часто задаваемые вопросы — Schneider Electric
{"searchBar":{"inputPlaceholder":"Поиск по ключевому слову или задать вопрос","searchBtn":" Search","error":"Пожалуйста, введите ключевое слово для поиска"}}  0.0.0″> Можно ли смоделировать функциональные блоки PTO в SoMachine Basic?
0.0.0″> Можно ли смоделировать функциональные блоки PTO в SoMachine Basic?
Проблема: Можно ли смоделировать функциональные блоки PTO в SoMachine Basic? Линейка продуктов: M221, TM221 Решение: Как и в случае с блоками PID, вы не можете имитировать блоки функций PTO в SoMachine Basic. Вы…
Двигатель 415 В, класс изоляции F, сопротивление dv/dt 1 кВ/мкс, Can можно…
Обычно двигатель с изоляцией класса F считается двигателем с классом ЧРП, но указано, что выдерживаемая способность dV/dT составляет 1 кВ/мкс. Следовательно, мы не можем рассматривать этот двигатель как класс частотно-регулируемого привода…
Как читать переставленные значения с плавающей запятой в Modbus
Проблема У пользователя есть устройство Modbus, содержащее переставленные регистры с плавающей запятой, и он хочет подтвердить считывание значений программным обеспечением, таким как Power Monitoring Expert (PME), с помощью SwappedFloat…
Что может вызвать отказ OPF2 в приводах ATV12?
Проблема: OPF2 на приводах ATV12? Линейка продуктов: Altivar ATV12 Окружающая среда: Все Причина: Привод пытается запустить двигатель, но отключается из-за неисправности OPF2. Разрешение: Неисправность OPF2 означает 3 фазы на выходе…
Популярные видео FAQsПопулярные видео
Видео — Ультразвуковой датчик XX M18 с аналоговым выходом,…
Видео: Как экспортировать модели данных для реле MiCOM
Видео — Ультразвуковой датчик XX — новый эталон для…
Узнайте больше из наших общих знаний Часто задаваемые вопросыОбщие сведения
Проверка сопротивления изоляции и влажность
Проблема: Как влажность влияет на результаты проверки сопротивления изоляции? Линейка продуктов: автоматические выключатели Окружающая среда: выключатели в литом и изолированном корпусах Разрешение: высокая влажность может значительно…
Что означает рейтинг AC-3e и каково его применение?
 6.2.1″> Класс AC-3e — это способность контактора запускать и выключать высокоэффективные асинхронные электродвигатели с короткозамкнутым ротором (IE-3/IE-4) во время работы и реверса, которые имеют…
6.2.1″> Класс AC-3e — это способность контактора запускать и выключать высокоэффективные асинхронные электродвигатели с короткозамкнутым ротором (IE-3/IE-4) во время работы и реверса, которые имеют…
Аварийный сигнал жизненного цикла силового модуля Symmetra PX 250/500K
Проблема: Аварийный сигнал жизненного цикла силового модуля Symmetra PX 250/500K Линейка продуктов: Symmetra PX 250/500K Причина: Клиенты могут позвонить, чтобы запросить FSR или спросить, как сбросить аварийный сигнал жизненного цикла на блоке питания…
Как установить связь с ПЛК S7-1500 при использовании TIA Portal.