
Росприроднадзор проведет пересчет содержания сероводорода на полигоне «Кучино»
27 сентября 2017, 08:25
Закрытие свалки в Балашихе
МОСКВА, 27 сентября. /ТАСС/. Специалисты Росприроднадзора установят окончательный уровень содержания сероводорода в воздухе на закрытом мусорном полигоне «Кучино» в городском округе Балашиха Московской области после анализа нескольких проб в разных точках объекта по специальной методике, которая включает в себя более 10 формул. Об этом журналистам рассказал начальник отдела регулирования обращения с отходами Росприроднадзора Михаил Качнов.
«Превышение было обнаружено. Но его величина (будет определена — прим. ТАСС) после более детального изучения и после непосредственного пересчета», — сказал он, комментируя результаты анализов на содержание сероводорода в воздухе над полигоном.
Ранее сообщалось, что Росприроднадзор обнаружил в пробах от 12 сентября на полигоне «Кучино» 5 мг/м3 сероводорода. Об этом стало известно из письма учреждения в адрес Министерства экологии и природопользования Московской области, которое распространили пользователи социальных сетей. Его подлинность подтвердили в Росприроднадзоре. В этом письме в предложении о количестве сероводорода в воздухе на полигоне в скобках указана норма предельно допустимой концентрации вещества (ПДК) — 0,008 мг/м3. То есть при прямом пересчете на этот ПДК на «Кучино» было 625-кратное превышение.
Его подлинность подтвердили в Росприроднадзоре. В этом письме в предложении о количестве сероводорода в воздухе на полигоне в скобках указана норма предельно допустимой концентрации вещества (ПДК) — 0,008 мг/м3. То есть при прямом пересчете на этот ПДК на «Кучино» было 625-кратное превышение.
Не та ПДК
Норма ПДК 0,008 мг/м3 установлена для воздуха населенных мест, согласно утвержденным гигиеническим нормативам (ГН2.1.6.1338-03), рассказали в пресс-службе администрации городского округа Балашиха.
«Тело полигона не может считаться населенным местом. Он относится к объектам 2 класса опасности, для которых предусмотрена санитарно-защитная зона 500 метров», — добавили в пресс-службе. При этом 5мг/м3 укладывается в нормы содержания сероводорода в воздухе рабочей зоны — 10мг/м3, отметили в муниципалитете.
Читайте также
Как Москва и область решают «мусорный вопрос» после закрытия полигона «Кучино»
На вопрос ТАСС, зачем Росприроднадзор привел норму ПДК для жилых зон в данных о пробах на полигоне, Качнов отметил, что возникло «недопонимание» из-за предоставления «избыточной информации».
«Специалист подготовил [письмо] для человека, который знает, как осуществляется пересчет и как принимаются эти значения. Произошло недопонимание», — сказал он.
«Говорить об угрозе жизни и здоровья людей можно только в том случае, если эти показатели (ПДК по сероводороду — прим. ТАСС) превышены на границе санитарно-защитной зоны», — рассказал журналистам первый замминистра экологии Подмосковья Павел Кириллов.
Экологи делали замеры воздуха на границе полигона «Кучино» 7 и 9 сентября, в обоих случаях превышения не было обнаружено, напомнили в администрации городского округа.
«Те показатели, которые были зафиксированы на теле полигона, соответствуют проекту (эксплуатации объекта — прим. ТАСС), который был ранее утвержден Росприроднадзором. На границе санитарно-защитной зоны происходит рассеивание загрязняющих веществ. Для этого она и устанавливается, чтобы вещества рассеивались», — добавил Кириллов.
Источник запаха
Росприроднадзор проверил состав выбросов с полигона «Кучино» в рамках экологического расследования источников неприятных запахов, на которые во второй половине августа 2017 года стали жаловаться жители Юго-Востока столичного региона — Косино-Ухтомского района, Капотни, Курьянова, Косина, Балашихи и Реутова.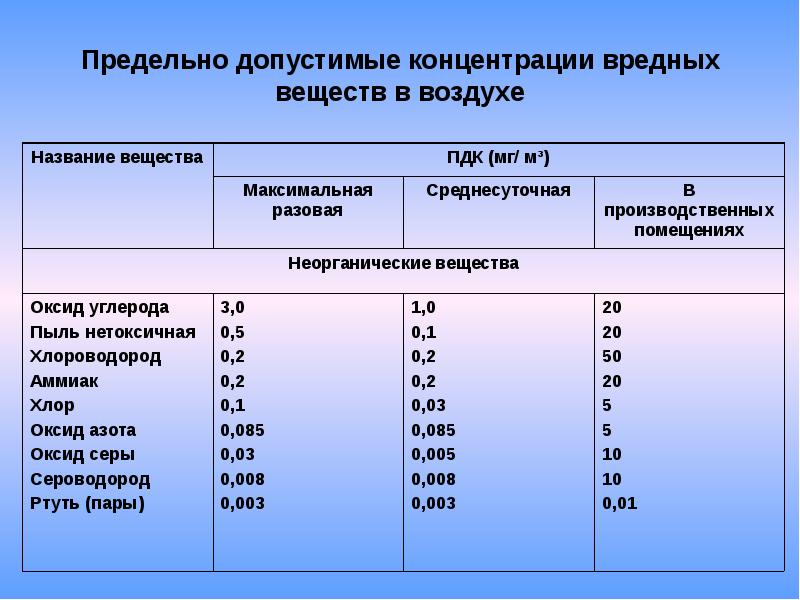
По словам главы Балашихи Сергея Юрова, чтобы определить источники, власти создали 8 сентября межрегиональный штаб для экологического расследования. В него вошли представители Министерства экологии Московской области, департамента экологии и природопользования Москвы и департамента Росприроднадзора по ЦФО.
В рамках этого расследования Минэкологии Подмосковья и Росприроднадзор в общей сложности намеревались проверить около 40 предприятий столичного региона.
«На сегодняшний день определены основные «подозреваемые» по источнику запаха», — сказал Юров. Согласно материалам Росприроднадзора, под проверки попали Люберецкие и Курьяновские очистные сооружения «Мосводоканала», мусоросжигательный завод № 4 ГУП «Экотехпром», пункт сортировки отходов ООО «УК «Кусор», ООО «ПК «Вторалюминпродукт», Московский НПЗ и мусорные полигоны ТБО «Кучино» и «Торбеево».
Проверки должны быть завершены до конца сентября 2017 года.
Теги:
РоссияЗакрытие свалки в БалашихеМодель прогнозирующего управления системой воздушного тракта для многорежимной работы в дизельном двигателе
Подход модельного прогнозирующего управления (MPC) разработан для системы воздушного тракта для многорежимной работы дизельного двигателя. MPC — это метод управления, основанный на прогностической динамической модели системы и определяющий положения управления приводом посредством оптимизации различных факторов, таких как отслеживание характеристик целевых уставок, скорость движения приводов, ограничения и т. д. Ранее линейный MPC успешно применялся на проблема управления воздушным потоком дизельного двигателя, однако большинство этих приложений были разработаны для одного режима работы, который имеет только один набор контрольных целевых значений уставок. В действительности один режим работы не может удовлетворить все потребности современных дизелей, что усложняет практическую реализацию линейных МПК. Первоочередными задачами при разработке дизельных двигателей являются низкий уровень выбросов, высокая тепловая эффективность и надежность. Эти цели требуют многорежимных операций, таких как режим HP EGR (рециркуляция выхлопных газов высокого давления) в условиях холодной охлаждающей жидкости, режим Double EGR для достаточной скорости EGR, режим регенерации дизельного сажевого фильтра (DPF) для нагрева выхлопных газов.
MPC — это метод управления, основанный на прогностической динамической модели системы и определяющий положения управления приводом посредством оптимизации различных факторов, таких как отслеживание характеристик целевых уставок, скорость движения приводов, ограничения и т. д. Ранее линейный MPC успешно применялся на проблема управления воздушным потоком дизельного двигателя, однако большинство этих приложений были разработаны для одного режима работы, который имеет только один набор контрольных целевых значений уставок. В действительности один режим работы не может удовлетворить все потребности современных дизелей, что усложняет практическую реализацию линейных МПК. Первоочередными задачами при разработке дизельных двигателей являются низкий уровень выбросов, высокая тепловая эффективность и надежность. Эти цели требуют многорежимных операций, таких как режим HP EGR (рециркуляция выхлопных газов высокого давления) в условиях холодной охлаждающей жидкости, режим Double EGR для достаточной скорости EGR, режим регенерации дизельного сажевого фильтра (DPF) для нагрева выхлопных газов. температура газа и обогащенный режим выхлопных газов для регенерации Lean NOx Trap (LNT). Для каждого режима работы двигателя требуются разные целевые уставки воздушного тракта, такие как массовый расход воздуха и концентрация кислорода.
температура газа и обогащенный режим выхлопных газов для регенерации Lean NOx Trap (LNT). Для каждого режима работы двигателя требуются разные целевые уставки воздушного тракта, такие как массовый расход воздуха и концентрация кислорода.
В многорежимном режиме простая линеаризация на основе MPC ограничена в практическом применении, поскольку точка линеаризации изменяется в зависимости от целевых уставок каждого режима работы. Это означает, что линейная модель для определенного режима работы недействительна в других режимах работы, которые имеют другие целевые уставки. Более того, современная система воздушного тракта дизеля сильно нелинейна и потребовала бы значительного количества линейных моделей для адекватного представления всего поведения не только во всех рабочих точках частоты вращения и нагрузки двигателя, но и в различных режимах работы.
В этом исследовании предложена и испытана на дизельном двигателе новая схема, использующая комбинированные преимущества контролирующего MPC и нелинейных компенсаторов на уровне компонентов.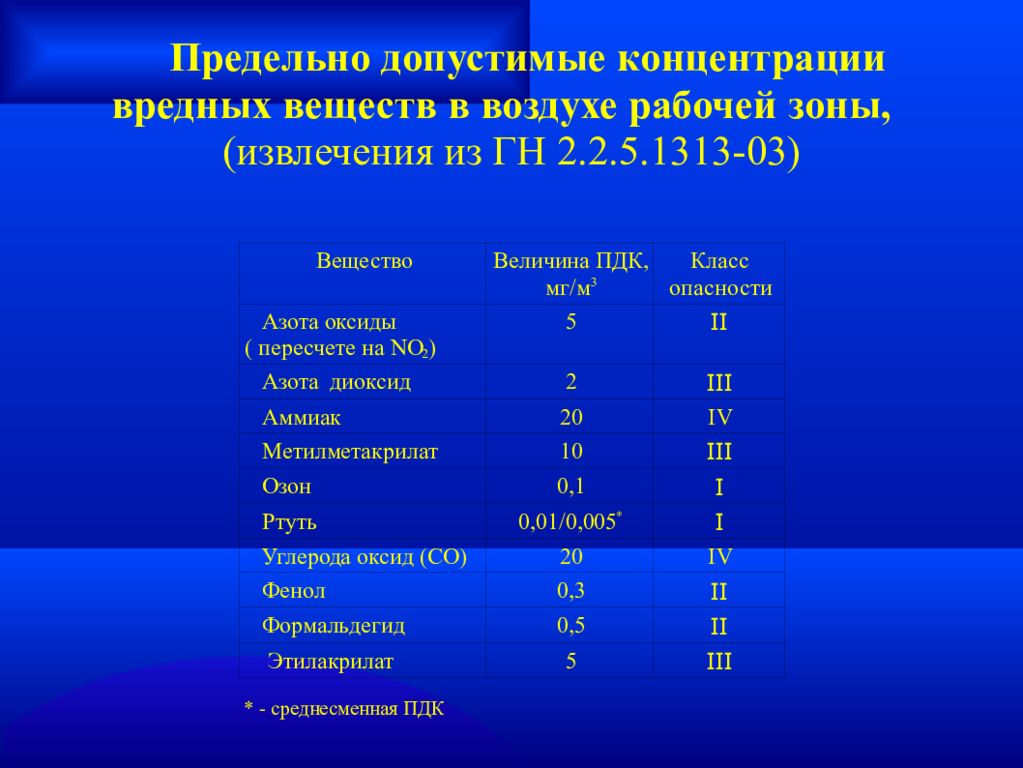 Разработанные нелинейные компенсаторы основаны на динамических инверсиях моделей отдельных компонентов в реальном времени. Схема управления состоит из трех частей: контрольный МПК как согласование целевых уставок на высоком уровне для достижения целей, управление нелинейным компенсатором на компонентном уровне, наблюдение за состоянием либо виртуальным датчиком, либо датчиком электронного блока управления (ЭБУ). Результаты испытаний на испытательном стенде двигателя и динамометрическом стенде показывают, что предложенный метод хорошо работает в многорежимном режиме и может применяться со значительным преимуществом, заключающимся в отсутствии необходимости в стратегиях управления и калибровке для конкретных режимов. Ценное преимущество этого подхода можно увидеть в усилиях по калибровке, особенно во время разработки, когда заданные значения не обязательно фиксированы.
Разработанные нелинейные компенсаторы основаны на динамических инверсиях моделей отдельных компонентов в реальном времени. Схема управления состоит из трех частей: контрольный МПК как согласование целевых уставок на высоком уровне для достижения целей, управление нелинейным компенсатором на компонентном уровне, наблюдение за состоянием либо виртуальным датчиком, либо датчиком электронного блока управления (ЭБУ). Результаты испытаний на испытательном стенде двигателя и динамометрическом стенде показывают, что предложенный метод хорошо работает в многорежимном режиме и может применяться со значительным преимуществом, заключающимся в отсутствии необходимости в стратегиях управления и калибровке для конкретных режимов. Ценное преимущество этого подхода можно увидеть в усилиях по калибровке, особенно во время разработки, когда заданные значения не обязательно фиксированы.
Зачем использовать MPC? | Понимание прогнозирующего управления моделями, часть 1, видео
Из серии: Понимание прогнозирующего управления моделью
Мелда Улусой, MathWorks
Узнайте о преимуществах использования прогнозирующего управления моделями (MPC). MPC использует модель системы для прогнозирования ее будущего поведения и решает задачу оптимизации для выбора наилучшего управляющего воздействия.
MPC использует модель системы для прогнозирования ее будущего поведения и решает задачу оптимизации для выбора наилучшего управляющего воздействия.
MPC может работать с системами с несколькими входами и несколькими выходами (MIMO), которые взаимодействуют между своими входами и выходами. Из-за этих взаимодействий часто сложно проектировать системы MIMO с использованием традиционных контроллеров, таких как PID. Однако MPC может одновременно управлять всеми выходами, принимая во внимание взаимодействие ввода-вывода.
MPC также может обрабатывать ограничения. Ограничения важны, так как их нарушение может привести к нежелательным последствиям. MPC имеет возможности предварительного просмотра (аналогично управлению с прямой связью). Если изменения уставки известны заранее, контроллер может лучше реагировать на эти изменения и улучшать свою работу.
Инженеры используют контроллеры MPC в обрабатывающей промышленности с 1980-х годов. С ростом вычислительной мощности микропроцессоров их использование распространилось на многие другие области, включая автомобильную и аэрокосмическую промышленность.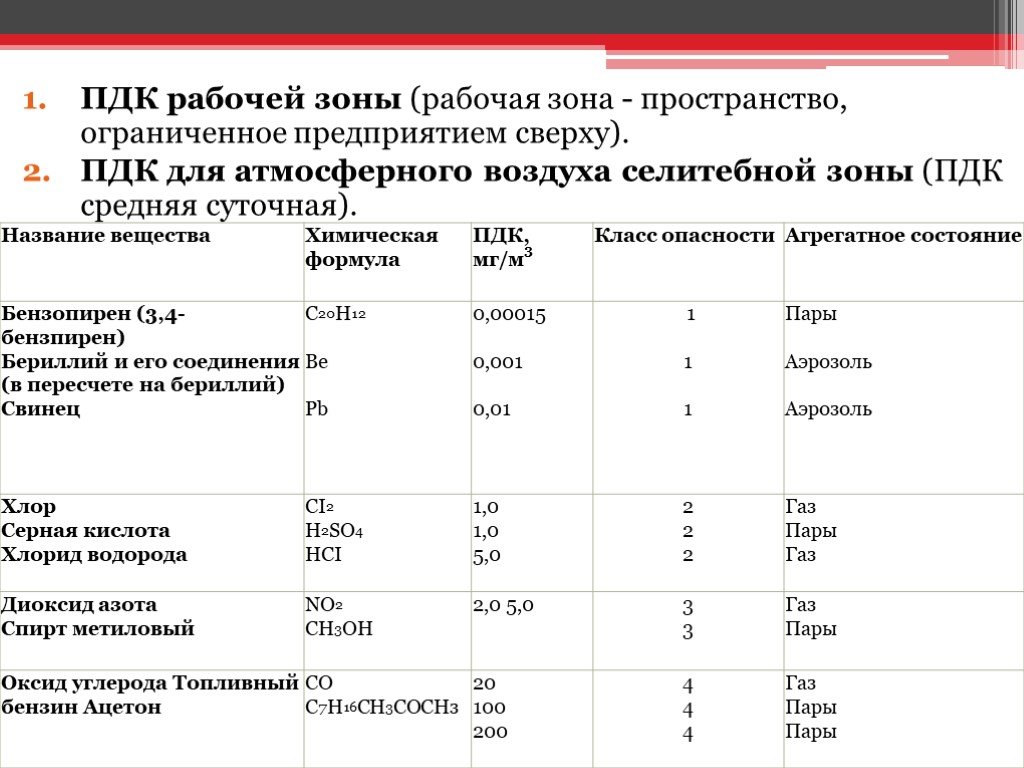
Вы когда-нибудь замечали, что инженерам по управлению очень нравятся трехбуквенные аббревиатуры? В этой серии мы сосредоточимся на MPC, который может быть самым популярным элементом управления для некоторых инженеров. Но на самом деле это означает управление моделью с прогнозированием. В этом видео мы обсудим причины, по которым вы бы его использовали. Но сначала давайте кратко рассмотрим основную идею MPC. MPC — это алгоритм управления с обратной связью, который использует модель для прогнозирования будущих результатов процесса.
Вот аналогия, поясняющая, что мы имеем в виду: скажем, вы ведете машину и ваша цель — удержать машину в пределах полосы движения. Решения, которые вы принимаете для достижения этой цели, очень похожи на то, как работает прогнозирующий контроллер модели. Вы знаете характеристики своего автомобиля: насколько быстро он едет или сколько он поворачивает, основываясь на принимаемых вами управляющих действиях. Используя эту модель автомобиля, вы выполняете симуляции в своей голове.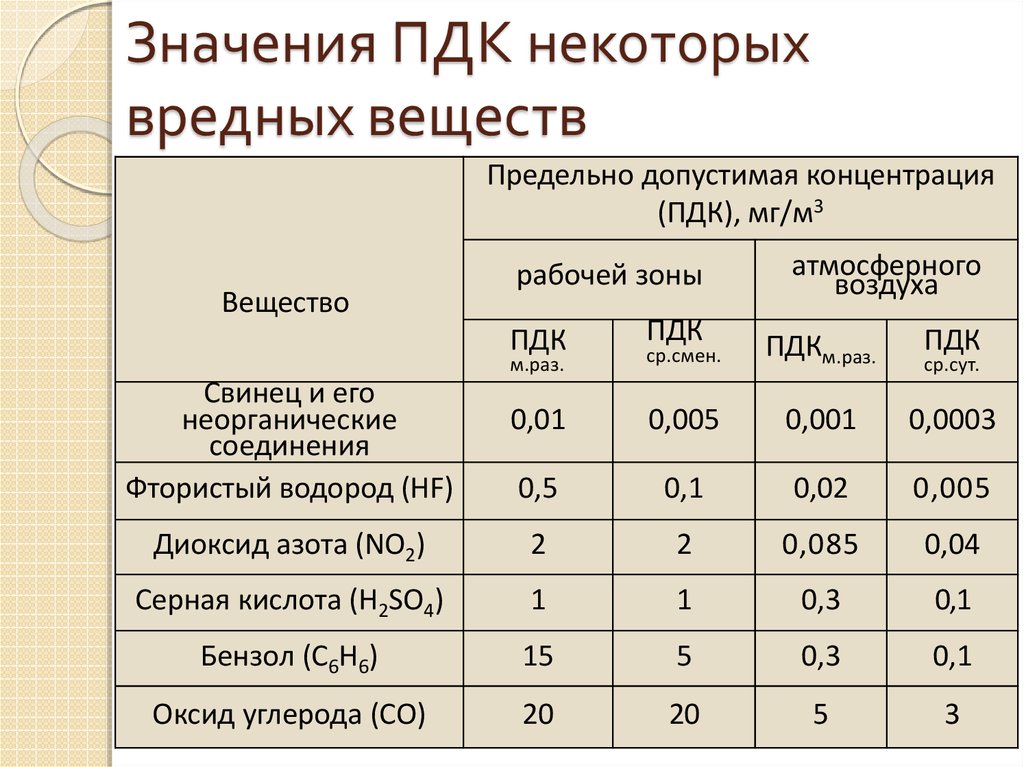 Они дают вам прогнозы о вашей будущей траектории на основе выбранных вами управляющих действий. Затем вы выбираете оптимальное действие, которое максимально приближает прогнозируемую траекторию к желаемой траектории. Это упрощенный пример, чтобы дать вам общее представление, но в следующем видео у нас будет гораздо более подробное обсуждение того, как работает MPC.
Они дают вам прогнозы о вашей будущей траектории на основе выбранных вами управляющих действий. Затем вы выбираете оптимальное действие, которое максимально приближает прогнозируемую траекторию к желаемой траектории. Это упрощенный пример, чтобы дать вам общее представление, но в следующем видео у нас будет гораздо более подробное обсуждение того, как работает MPC.
Вот несколько причин, по которым вам может понадобиться управление с прогнозированием модели. MPC может обрабатывать системы с несколькими входами и несколькими выходами, которые могут иметь взаимодействие между своими входами и выходами. Например, в этой системе MIMO изменение второго вывода также влияет на первый вывод. Если бы мы использовали ПИД-регуляторы, их проектирование было бы сложной задачей, потому что два контура управления работали бы независимо друг от друга, как если бы между двумя контурами не было взаимодействия. А проектирование более крупных систем было бы еще более сложной задачей, поскольку для этого потребовалась бы настройка слишком большого числа коэффициентов усиления контроллера.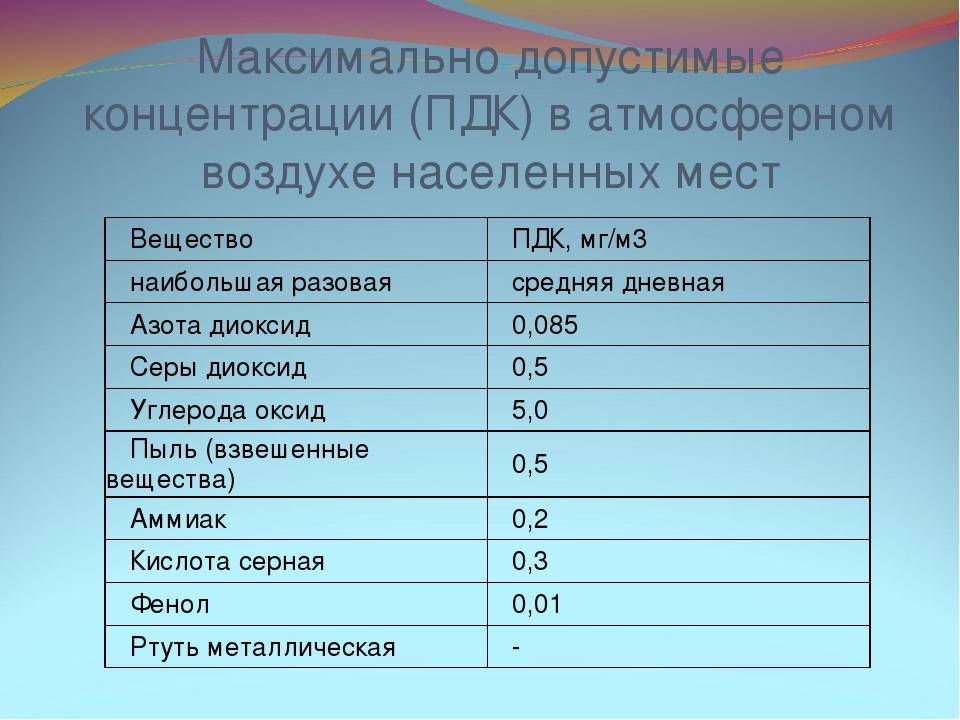 Преимущество MPC заключается в том, что это многопараметрический контроллер, который одновременно управляет выходами, принимая во внимание все взаимодействия между системными переменными. Еще одна сильная сторона MPC заключается в том, что он может работать с ограничениями. Ограничения важны, потому что их нарушение может привести к нежелательным последствиям. Например, некоторые из ограничений безопасности во время вождения заключаются в том, что автомобили должны соблюдать ограничения скорости и поддерживать безопасное расстояние от других автомобилей. Существуют также ограничения, связанные с физическими ограничениями автомобиля, например ограничения на ускорение. Если бы это был автономный автомобиль, управляемый MPC, контроллер отслеживал бы желаемую траекторию, удовлетворяя всем этим ограничениям.
Преимущество MPC заключается в том, что это многопараметрический контроллер, который одновременно управляет выходами, принимая во внимание все взаимодействия между системными переменными. Еще одна сильная сторона MPC заключается в том, что он может работать с ограничениями. Ограничения важны, потому что их нарушение может привести к нежелательным последствиям. Например, некоторые из ограничений безопасности во время вождения заключаются в том, что автомобили должны соблюдать ограничения скорости и поддерживать безопасное расстояние от других автомобилей. Существуют также ограничения, связанные с физическими ограничениями автомобиля, например ограничения на ускорение. Если бы это был автономный автомобиль, управляемый MPC, контроллер отслеживал бы желаемую траекторию, удовлетворяя всем этим ограничениям.
Другой особенностью MPC является возможность предварительного просмотра, аналогичная управлению с прямой связью. Допустим, автономный автомобиль едет по извилистой дороге. Если контроллер не знает, что впереди поворот, он сможет затормозить только во время прохождения поворота.
Контроллеры с прогнозирующими моделями используются в обрабатывающей промышленности с 1980-х годов. С увеличением вычислительной мощности микропроцессоров их использование распространилось и на другие области. Некоторые из этих областей перечислены здесь.
MPC обладает всеми этими преимуществами, но следует отметить, что для него требуется мощный и быстрый процессор с большим объемом памяти. И причина в том, что MPC решает задачу онлайн-оптимизации на каждом временном шаге, о которой мы поговорим подробнее в следующем видео.
Таким образом, MPC использует модель системы для прогнозирования ее будущего поведения и решает онлайн-алгоритм оптимизации для выбора наилучшего управляющего действия, которое приводит прогнозируемый результат к эталонному.