От чего зависит частота вращения двигателя: Частота вращения электродвигателя | Полезные статьи
Содержание
Регулирование частоты вращения якоря тягового двигателя и изменение направления его вращения
Способы регулирования частоты вращения якоря. Из формулы (1) следует, что частота вращения якоря двигателя постоянного тока зависит от питающего напряжения ?/, падения напряжения 1ягя в цепи обмотки якоря и магнитного потока Ф. Поэтому ее можно регулировать тремя способами:
изменением питающего напряжения 11\
включением реостата в цепь обмотки якоря;
изменением магнитного потока Ф.
Так как напряжение в контактной сети метрополитена постоянное, то изменить питающее напряжение тяговых двигателей можно их перегруппировкой. Для того чтобы получить минимальную скорость вагона, к каждому из четырех тяговых двигателей подводится минимальное напряжение, что обеспечивается тогда, когда двигатели соединены последовательно (рис. 48, а). При таком соединении напряжение, подводимое к одному двигателю, в 4 раза меньше напряжения в контактном рельсе.
Соединение тяговых двигателей 1-4 в две параллельные группы (рис. 48, б) по два последовательно включенных в каждой условно называют параллельным. В этом случае напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения в контактном рельсе, и частота вращения якоря двигателя увеличится вдвое по сравнению с частотой вращения при последовательном соединении.
При включении реостата напряжение питающей сети распределяется между тяговыми двигателями и реостатом. По мере выведения ступеней реостата увеличивается напряжение на зажимах двигателей и соответственно частота вращения якорей двигателей.
Такой способ регулирования прост и позволяет плавно изменять частоту вращения в широком диапазоне. Однако при этом возникают большие потери энергии в реостате.
Рис. 48. Схемы последовательного (а) и последовательно-параллельного (б) соединения тяговых двигателей
Для регулирования частоты вращения якоря изменением магнитного потока шунтируют обмотки главных полюсов — обмотки возбуждения (рис.
49, а). В этом случае параллельно обмоткам возбуждения включают резистор 7?ш, и через обмотку возбуждения будет протекать только часть тока обмотки якоря (другая часть этого тока в точке О ответвляется в шунтирующий резистор), что приводит к ослаблению возбуждения тягового двигателя и возрастанию частоты вращения его якоря.
Степень ослабления возбуждения зависит от сопротивления шунтирующего резистора. На подвижном составе метрополитена для плавного изменения частоты вращения якоря применяют несколько ступеней ослабления возбуждения.
Рассмотрим пример ослабления возбуждения двумя ступенями (рис. 49, б). При включении только контактора 7 образуется первая ступень, при которой параллельно обмотке возбуждения включаются две последовательно соединенные секции шунтирующего резистора. При включенных контакторах 7 и 2 получают вторую ступень ослабления возбуждения, при которой параллельно обмотке возбуждения включена одна секция шунтирующего резистора (вторая замкнута контактором 2).
Скоростные ходовые характеристики, показанные на рис. 50, соответствуют последовательному (С) и параллельному (77) соединениям тяговых двигателей с различными ступенями ослабления возбуждения. При полном возбуждении (#77) последовательно соединенных тяговых двигателей вагон имеет определенную скорость. Включив первую ступень ослабления возбуждения (ОП1), получают новую возросшую скорость движения. Второй ступени ослабления возбуждения (0772) соответствует еще одна скорость движения вагона при последовательном соединении тяговых двигателей. То же самое можно сделать и при параллельном соединении тяговых двигателей (77).
Если в тяговом режиме для увеличения частоты вращения якоря возбуждение тяговой машины уменьшают, то в тормозном режиме для уменьшения частоты вращения якоря возбуждение увеличивают.
Назначение индуктивного шунта. Обмотка возбуждения тягового двигателя обладает большой индуктивностью, поскольку через ее витки протекает большой ток, а сердечник имеет большую массу. В цепях же с большой индуктивностью при изменении или отключении тока и его последующем включении (например, при отрыве токоприемника от контактного рельса) возникает значительная э. д. с. самоиндукции. Так как э. д. с. направлена против тока и препятствует его протеканию по обмотке возбуждения, то большая часть тока пойдет по шунтирующему резистору, что приведет к нарушению принятого распределения токов 1 и /ш в параллельных ветвях и к недопустимому ослаблению магнитного потока тягового двигателя.
Для того чтобы избежать чрезмерного ослабления магнитного потока тягового двигателя при резком изменении тока, что может привести к возникновению кругового огня на коллекторе, последовательно с шунтирующим резистором включают катушку индуктивности ИШ, называемую индуктивным шунтом (рис. 49, в). Изменение тока в цепи двигателя будет вызывать возникновение э. д. с. самоиндукции как в обмотке возбуждения, так и в индуктивном шунте. При этом индуктивность шунта выбирают близкой к индуктивности обмотки возбуждения, чтобы э.
д.с. самоиндукции не нарушала принятого распределения токов 1 и /ш между обмоткой возбуждения и шунтирующей цепью.
Изменение направления вращения якоря. Для изменения направления вращения якоря (реверсирования) двигателя нужно изменить или направление магнитного потока главных полюсов машины, или направление тока в обмотке якоря. Одновременное изменение магнитного потока и тока якоря не приведет к изменению направления вращения, в чем можно убедиться, применив правило левой руки.
Рис. 50. Скоростные характеристики тягового двигателя
Рис. 51 Схемы изменения направления вращения якоря тягового двигателя
Для упрощения силовых цепей реверсирование двигателей осуществляют, изменяя направление тока в обмотках якорей (рис. 51, а и б)
Реверсируют тяговые двигатели аппаратами, называемыми реверсорами, в которых в зависимости от задаваемого направления вращения включаются контакторы Вперед или Назад.
2. Каким образом осуществляется ослабление возбуждения двигателя?
3. Какими способами можно менять напряжение на зажимах тягового двигателя?
4. Как изменяют направление вращения вала тягового двигателя?
⇐Пуск тягового двигателя | Электропоезда метрополитена | Электрическое торможение⇒
Untitled Document
Принцип действия
и устройство
ассинхронного
двигателя.
Работа под нагрузкой,
вращающий момент
и рабочие характеристики
ассинхронного двигателя..
Пуск в ход и регулирование
частоты вращения
трёхфазных ассинхронных двигателей.
Однофазные ассинхронные двигатели.
Работа
асинхронного двигателя под нагрузкой.
В рабочем режиме ротор двигателя вращается с частотой
n2, меньшей частоты n1
магнитного поля статора, вращающегося в том же направлении, что и ротор.
Поэтому магнитное поле, имеющее большую частоту, скользит относительно
ротора с частотой (об/мин), равной разности частот поля и ротора, т.
е. ns = n1
— n2.
Относительное отставание ротора от вращающегося магнитного поля статора
характеризуется скольжением S.
Скольжение представляет собой отношение разности частот вращения магнитного
поля статора и вращающегося ротора к частоте поля статора S = ns/n1
= (n1 — n2)/n1.
Эта формула определяет скольжение в относительных единицах.Скольжение
может быть также выражено в процентах:
S = ((n1
— n2)/n1)
x 100%.
Если ротор неподвижен (n2
= 0), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой
частотой
(n2
= n1), то скольжение равно
нулю.
Таким образом, чем больше частота вращения ротора, тем меньше скольжение.
В рабочем режиме асинхронного двигателя скольжение мало.
У современных асинхронных двигателей скольжение при полной нагрузке
составляет 3—5%, т.е. ротор вращается с частотой, незначительно отличающейся
от частоты магнитного поля статора.
При холостом ходе, т. е. при отсутствии нагрузки на валу, скольжение
ничтожно мало и может быть принято равным нулю.
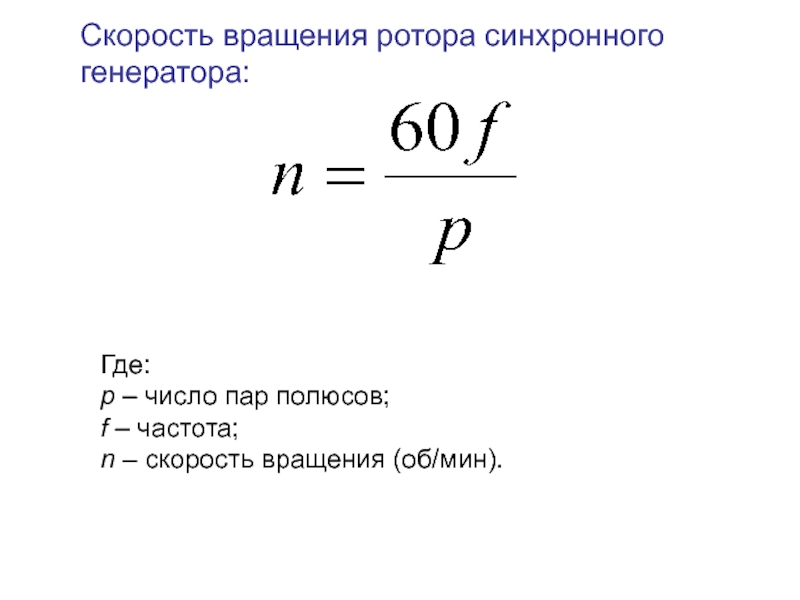
Частоту вращения ротора можно определить из следующих соотношений: n2 =
n1 — ns = n1(1 — S) = (60f1/p)(1
— S).
Двигатель будет работать устойчиво с постоянной частотой вращения ротора
при равновесии моментов, т. е. если вращающий двигателя М
будет равен тормозному моменту на валу двигателя Мт,
который развивает приемник механической энергии, например резец токарного
станка. Следовательно, можно записать: М
= Мт.
Любой нагрузке машины соответствует определенная частота вращения ротора
n2
и определенное скольжение S.
Магнитное поле статора вращается относительно ротора с частотой ns
и индуктирует в его обмотке эдс Е2,
под действием которой по замкнутой обмотке ротора проходит ток I2.
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент,
то равновесие моментов будет нарушено, так как тормозной момент окажется
больше вращающего.
Это приведёт к уменьшению частоты вращения ротора, а следовательно,
к увеличению скольжения. С увеличением скольжения магнитное поле будет
пересекать проводники обмотки ротора чаще, эдс E2,
индуктированная в обмотке ротора, возрастет, а в результате как ток
в роторе, так и развиваемый двигателем вращающий момент.
Скольжение и ток в роторе будут увеличиваться до значений, при которых
вновь наступит равновесие моментов, т. е. вращающий момент станет равным
тормозному.
Так же протекает процесс изменения частоты вращения ротора и развиваемого
момента при уменьшении нагрузки двигателя. С уменьшением нагрузки на
валу двигателя тормозной момент становится меньше вращающего, что приводит
к увеличению частоты вращения ротора или к уменьшению скольжения.
В результате уменьшаются эдс и ток в обмотке ротора, а следовательно,
и вращающий момент, который вновь становится равным тормозному моменту.
Магнитное поле статора пересекает проводники обмотки статора и индуктирует
в ней эдс Е1, которая уравновешивает
приложенное напряжение сети U1.
Если пренебречь падением напряжения в сопротивлении обмотки статора,
которое мало по сравнению с эдс, то между абсолютными значениями приложенного
напряжения и эдс обмотки статора можно допустить приближенное равенство,
т. е. U1 =
E1.
Таким образом, при неизменном напряжении сети будет неизменна и эдс
обмотки статора. Следовательно, магнитный поток в воздушном зазоре машины,
так же как в трансформаторе, при любом изменении нагрузки остается примерно
постоянным.
Ток обмотки ротора создает свое магнитное поле, которое направлено противоположно
магнитному полю тока обмотки статора. Чтобы результирующий магнитный
поток в машине оставался неизменным при любом изменении нагрузки двигателя,
размагничивающее магнитное поле обмотки ротора должно быть уравновешено
магнитным полем обмотки статора. Поэтому при увеличении тока в обмотке
ротора увеличивается и ток в обмотке статора.
Таким образом, асинхронный двигатель подобен трансформатору, у которого
при увеличении тока во вторичной обмотке увеличивается ток в первичной
обмотке.
Вращающий
момент асинхронного двигателя.
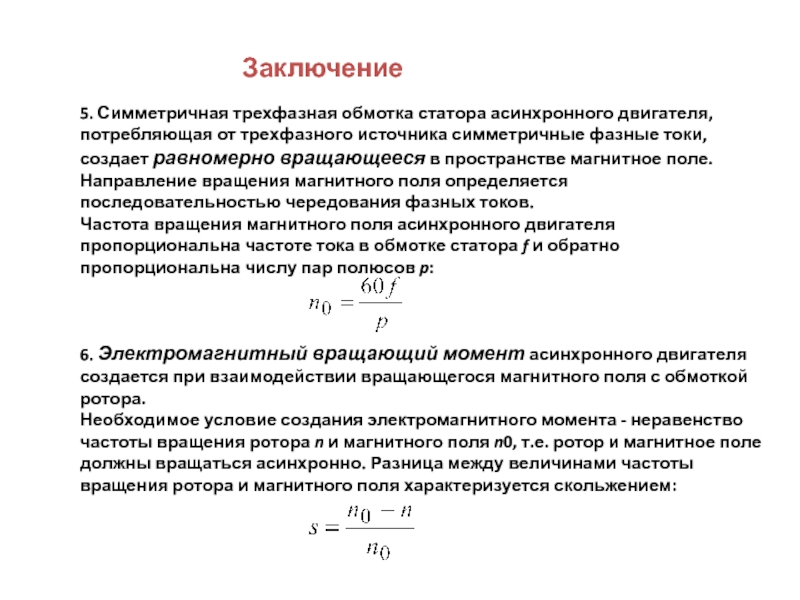
Вращающий момент асинхронного двигателя создается при взаимодействии
вращающегося магнитного поля статора с токами в проводниках обмотки
ротора. Поэтому вращающий момент зависит как от магнитного потока статора
Фm,
так и от тока в обмотке ротора I2.
Однако в процессе преобразования энергии (создании вращающего момента)
участвует только активная мощность, потребляемая машиной из сети. Вследствие
этого вращающий момент зависит не от тока в обмотке ротора I2,
а только от его активной составляющей, т. е. I2Xcos2,
где 2
— фазный угол между эдс и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется
следующим выражением: М = С Фm I2
cos2,
где С
— конструктивная постоянная машины, зависящая от числа ее полюсов и
фаз, числа витков обмотки статора и конструктивного выполнения обмотки.
При условии постоянства приложенного напряжения магнитный поток остается
также почти постоянным при любом изменении нагрузки двигателя.
Таким образом, в выражении вращающего момента величины Фm и С постоянны
и вращающий момент пропорционален только активной составляющей тока
в обмотке ротора, т. е. M
~ I2cos2.
Изменение нагрузки или тормозного момента на валу двигателя изменяет
частоту вращения ротора и скольжение, что вызовет изменение как тока
в роторе I2,
так и его активной составляющей I2
cos2.
Можно ток в роторе определить отношением эдс к полному сопротивлению,
т. е. I2 =
E2/Z2 = E2/(R
+ X) и
cos2
= R2/(R
+ X),
где Z2,
R2
и X2
— полное, активное и реактивное сопротивления фазы обмотки ротора.
Вместе со скольжением изменяется частота тока ротора.
При неподвижном роторе (n2
= 0 и S
= 1) вращающееся поле с одинаковой частотой пересекает
проводники обмотки статора и ротора и частота тока в роторе равна частоте
тока в сети (f2
= f1).
При уменьшении скольжения обмотка ротора пересекается магнитным полем
с меньшей частотой, так что частота тока в роторе уменьшается. Когда
ротор вращается синхронно с полем (n2
= n1 и
S = 0), проводники обмотки ротора не пересекаются
магнитным полем, так что частота тока в роторе равна нулю f2
=0.
Таким образом, частота тока в роторе пропорциональна скольжению, т.
е. f2
=Sf1.
Активное сопротивление обмотки ротора почти не зависит от частоты, тогда
как эдс и реактивное сопротивление пропорциональны частоте, т. е. изменяются
с изменением скольжения, и могут быть определены следующими выражениями: E2 =
SE и X2
= SX,
где Е
и X —
соответственно эдс и индуктивное conpoтивление фазы обмотки неподвижного
ротора. Таким образом, имеем: I2 =
SE/(R
+ (SX))
и cos2
= R2/(R
+ (SX))
и вращающий момент M
I2cos2
= SER2/(R
+ (SX))
Зависимость
вращающего момента
асинхронного двигателя от скольжения
Следовательно, при небольших скольжениях (примерно до 20%), когда SX
мало по сравнению с R2,
увеличение скольжения вызывает повышение вращающего момента, так как
при этом возрастает активная составляющая тока в роторе (I2cos2).
При больших скольжениях (SX>R2)
увеличение скольжения будет вызывать уменьшение вращающего момента.
Таким образом, хотя и возрастает ток в роторе I2,
но его активная составляющая I2cos2
и, следовательно, вращающий момент уменьшатся вследствие значительного
повышения реактивного сопротивления обмотки ротора.
На изо показана зависимость вращающего момента от скольжения.
При некотором скольжении Sm
(примерно 20%) двигатель развивает максимальный момент, который определяет
перегрузочную способность двигателя и обычно в 2 — 3 раза превышает
номинальный момент.
Устойчивая работа двигателя возможна только на восходящей ветви кривой
зависимости момента от скольжения, т. е при изменении скольжения в пределах
от 0 до
Sm.
Работа двигателя на нисходящей ветви указанной зависимости, т. е. при
скольжении S > Sm
невозможна, так как не обеспечивается устойчивое
равновесие моментов.
Если предположить, что вращающий момент был равен тормозному (M
= МТ) в точках А
и Б, то
при случайном нарушении равновесия моментов в одном случае оно восстанавливается,
а в другом не восстанавливается.
Допустим, что вращающий момент двигателя почему-либо уменьшился (например,
при понижении напряжения сети), тогда скольжение начнет увеличиваться.
Если равновесие моментов было в точке A,
то увеличение скольжения вызовет увеличение вращающего момента двигателя
и он станет вновь равным тормозному моменту, т. е. равновесие моментов
восстановится.
Если же равновесие моментов было в точке Б,
то увеличение скольжения вызовет уменьшение вращающего момента, который
будет оставаться всегда меньше тормозного, т. е. равновесие моментов
не восстановится и частота вращения ротора будет непрерывно уменьшаться
до полной остановки двигателя.
Если приложить к валу двигателя тормозной момент, больший максимального
момента, то равновесие моментов нарушится и ротор двигателя остановится.
Вращающий момент двигателя пропорционален квадрату приложенного напряжения,
так как пропорциональны напряжению как магнитный поток, так и ток в
роторе. Поэтому изменение напряжения в сети вызывает значительное изменение
вращающего момента.
Рабочие
характеристики асинхронного двигателя.
Рабочие
характеристики асинхронного двигателя представляют собой зависимости скольжения
S, частоты вращения ротора
n2, развиваемого момента
М, потребляемого тока I1,
расходуемой мощности P1,
коэффициента мощности cos
и кпд от полезной
мощности Р2 на валу машины.
Эти характеристики (изо) снимаются при естественных условиях работы двигателя,
т. е. двигатель нерегулируемый, частота тока f1
и напряжение U1 сети остаются
постоянными, а , изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя скольжение возрастает, причем
при больших нагрузках скольжение увеличивается несколько быстрее, чем
при малых.
При холостом ходе двигателя скольжение очень мало (n2
~ n1 или S ~ 0).
При номинальной нагрузке скольжение обычно составляет S
= 3 — 5% (0,95).
При увеличении нагрузки на валу двигателя скольжение возрастает, а частота
вращения будет уменьшаться. Однако изменение частоты вращения при увеличении
нагрузки от 0
до номинальной очень не значительно и не превышает 5
%. Поэтому скоростная характеристика асинхронного двигателя
является жесткой — она имеет очень малый наклон к горизонтальной оси.
Вращающий момент М, развиваемый
двигателем, уравновешен тормозным моментом Мт
на валу и моментом Мо,
идущим на преодоление механических потерь, т. е. М = Мт + М0 = Р2/2—М0,
где Р2 — полезная мощность
двигателя, 2
— угловая скорость ротора.
При холостом ходе двигателя М = М0;
с увеличением нагрузки на валу вращающий момент также увеличивается, причем
за счет некоторого уменьшения частоты вращения ротора увеличение вращающего
момента происходит быстрее, чем увеличение полезной мощности на валу.
Рабочие характеристики асинхронного двигателя
Ток I1, потребляемый
двигателем из сети, неравномерно изменяется с увеличением нагрузки на
валу двигателя.
При холостом ходе cos
мал и ток имеет большую реактивную составляющую.
При малых нагрузках на валу двигателя активная составляющая статора
меньше реактивной составляющей, поэтому активная составляющая тока незначительно
влияет на ток I1, определяющийся
в основном реактивной составляющей.
При больших нагрузках активная составляющая тока статора становится
больше реактивной и изменение нагрузки вызывает большое изменение тока
I1.
Графически зависимость потребляемой двигателем мощности Р1
выражается прямой линией, незначительно отклоняющейся вверх от прямой
при больших нагрузках, что объясняется увеличением потерь в обмотках
статора и ротора с возрастанием нагрузки.
Коэффициент мощности изменяется в зависимости от нагрузки на валу двигателя
следующим образом. При холостом ходе cos
мал (порядка 0,2), так
как активная составляющая тока статора обусловленная потерями мощности
в машине, мала по сравнению с реактивной составляющей этого тока, создающей
магнитный поток.
При увеличении нагрузки на валу cos
возрастает (достигая наибольшего значения 0,8—0,95)
в результате увеличения активной составляющей тока статора.
При очень больших нагрузках происходит некоторое уменьшение cos,
так как вследствие значительного увеличения скольжения и частоты тока
в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая кпд имеет
такой же вид, как в любой машине или трансформаторе. При холостом ходе
кпд равен нулю. С увеличением нагрузки на валу двигателя кпд резко увеличивается,
а затем уменьшается. Наибольшего значения кпд достигает при такой нагрузке,
когда потери мощности в стали и механические потери, не зависящие от
нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим
от нагрузки.
От чего зависит число оборотов двигателя?
Написано Шехрияром Шахидом в блоге
Распространяйте любовь
Современные двигатели рассчитаны на работу в определенных диапазонах оборотов, которые можно определить, просмотрев характеристики двигателя. Давайте обсудим это более подробно в этом посте.
Число оборотов двигателя определяется количеством воздуха и топлива, впрыскиваемого в двигатель.
Число оборотов двигателя определяется количеством воздуха и топлива, впрыскиваемого в двигатель. Чем больше впрыскивается воздуха и топлива, тем выше будут обороты. На число оборотов также влияет размер двигателя, тип топлива и высота над уровнем моря.
Воздушно-топливная смесь воспламеняется свечой зажигания, что заставляет поршни двигаться вверх и вниз.
Воздушно-топливная смесь воспламеняется свечой зажигания, которая заставляет поршни двигаться вверх и вниз. Скорость двигателя измеряется в оборотах в минуту (об/мин) и регулируется дроссельной заслонкой. Чем выше обороты, тем больше мощности выдает двигатель.
Движение поршней создает волны давления в воздухе, которые заставляют двигатель вращаться.
Движение поршней создает волны давления в воздухе, которые заставляют двигатель вращаться. Это известно как вращательное движение в минуту или RPM. Чем выше обороты, тем больше мощности выдает двигатель.
Число оборотов двигателя определяется тем, насколько быстро эти волны давления распространяются по воздуху.
Если есть ограничение на впуске, это приведет к тому, что волны будут складываться, что приведет к снижению оборотов. Когда двигатель работает, давление воздуха внутри него всегда стремится сравняться с атмосферным давлением. Это приводит к тому, что волна давления распространяется по впускному каналу в цилиндры. Чем быстрее движутся эти волны давления, тем выше будут обороты
Большие двигатели создают волны давления, которые распространяются быстрее, чем двигатели меньшего размера.
Меньшие двигатели создают волны давления, которые распространяются медленнее, чем большие двигатели. Большие двигатели создают больше волн давления, и эти волны распространяются быстрее, чем волны, создаваемые меньшими двигателями. Это связано с более высокими оборотами двигателя большего размера. Увеличенная скорость волн создает более высокое давление в камере сгорания, что приводит к большей мощности и лучшей экономии топлива.
На число оборотов двигателя также может влиять тип используемого топлива.
На число оборотов двигателя также может влиять тип используемого топлива. Например, бензиновые двигатели обычно имеют более высокие обороты, чем дизельные двигатели. Это связано с тем, что бензиновые двигатели предназначены для работы на более высокой скорости, чтобы создавать большую мощность.
Кроме того, тип топлива также может влиять на плавность работы двигателя. Например, дизельные двигатели, как правило, работают более плавно, чем бензиновые, потому что у них меньше вибрации
Вывод: тип используемого топлива может влиять на число оборотов двигателя
Число оборотов в минуту автомобиля является мерой скорости вращения двигателя. Тип используемого топлива может влиять на число оборотов двигателя. Например, бензиновые двигатели, как правило, имеют более высокие обороты, чем дизельные двигатели. Это связано с тем, что бензиновые двигатели рассчитаны на более высокую степень сжатия, чем дизельные двигатели.
Последние сообщения
ссылка на Как удалить тормозную пыль с колес автомобиля
Как удалить тормозную пыль с колес автомобиля
Поддержание внешнего вида вашего автомобиля требует большего, чем просто чистый внешний вид. В запущенных местах, например на колесах, может скапливаться тормозная пыль, стойкий серый осадок, который может выглядеть неприглядно и…
Продолжить чтение
ссылка на Кто делает Porsche? Взгляд на историю компании
Кто делает Порше? Взгляд на историю компании
С 1931 года Porsche является известным немецким производителем автомобилей, известным своими высокопроизводительными спортивными автомобилями, внедорожниками и седанами. Он был основан Фердинандом Порше и его единомышленниками, сосредоточившись на…
Продолжить чтение
Основы определения мощности и крутящего момента — что вам нужно знать
Перейти к основному содержанию
Скрыть
Показать
Немногие понимают, что на самом деле означают мощность и крутящий момент, не говоря уже о том, как они влияют на характеристики автомобиля. Тем не менее, почти в каждой рекламе тяжелых грузовиков в какой-то момент упоминаются эти характеристики. Если вы никогда не замечали, попробуйте прислушаться к нему в следующий раз, когда увидите.
Мощность, производимая двигателем, называется его лошадиной силой . В физике мощность определяется как скорость, с которой что-то работает. Для автомобилей лошадиные силы переводятся в скорость. Поэтому, если вы хотите ехать быстрее и быстрее набирать скорость, вам нужно больше лошадиных сил.
Крутящий момент, с другой стороны, является выражением силы вращения или скручивания . В транспортных средствах двигатели вращаются вокруг оси, создавая таким образом крутящий момент. Крутящий момент можно рассматривать как «силу» транспортного средства. Это сила, которая разгоняет спортивную машину до 100 км/ч за секунды и отталкивает вас обратно на сиденье. Это также то, что приводит в движение большие грузовики, перевозящие тяжелые грузы.
Это основные понятия мощности и крутящего момента, но как эти понятия измеряются и как они взаимосвязаны?
За числами
С математической точки зрения, лошадиная сила — это сила, необходимая для перемещения 550 фунтов на один фут в секунду или 33 000 фунтов на один фут в минуту. Мощность двигателя измеряется с помощью динамометра, но на самом деле динамометр измеряет выходной крутящий момент двигателя, а также число оборотов в минуту или «оборотов в минуту». Эти числа включены в формулу (крутящий момент x об/мин / 5252) для определения лошадиных сил. Мощность в лошадиных силах определяется путем измерения крутящего момента, потому что крутящий момент легче рассчитать.
Крутящий момент, как упоминалось ранее, является выражением силы кручения и измеряется в единицах силы, умноженной на расстояние от оси вращения. Так, например, если вы используете гаечный ключ длиной 1 фут, чтобы приложить усилие в 10 фунтов к концу болта, то вы применяете крутящий момент в 10 фунт-футов (10 фунт-футов).
2021 Ram 1500:
Грузовик года по версии MotorTrend
Третий год подряд грузовик RAM получает награду «Грузовик года по версии MotorTrend». вещь или 2, когда дело доходит до производительности грузовика, меняющей правила игры.
Взаимосвязь между мощностью и крутящим моментом
И мощность, и крутящий момент влияют на общую скорость автомобиля, так что вы можете понять, почему люди смешивают их. Однако в реальном мире вождения и перевозки их различия — наряду с конструкцией автомобиля — оказывают значительное влияние.
Например, чем больше мощность двигателя, тем выше потенциальный крутящий момент. Способ, которым этот «потенциальный» крутящий момент реализуется в реальных приложениях, — через межосевые дифференциалы и трансмиссию автомобиля. Это объясняет, почему гоночный автомобиль и трактор с одинаковой мощностью могут так сильно различаться. В гоночном автомобиле весь крутящий момент используется для ускорения через передачу, в то время как трактор преобразует лошадиную силу в толкание и тягу чрезвычайно тяжелых грузов.
Еще один способ понять соотношение мощности и крутящего момента — это открутить крышку на новой банке для рассола. Когда вы используете всю свою силу, чтобы открыть банку, вы прикладываете крутящий момент независимо от того, оторвется крышка или нет. Однако лошадиная сила существует только при движении. Таким образом, вам нужен крутящий момент, чтобы сначала ослабить крышку, а затем вы можете приложить усилие рукой, быстро вращая крышку.



 В цепях же с большой индуктивностью при изменении или отключении тока и его последующем включении (например, при отрыве токоприемника от контактного рельса) возникает значительная э. д. с. самоиндукции. Так как э. д. с. направлена против тока и препятствует его протеканию по обмотке возбуждения, то большая часть тока пойдет по шунтирующему резистору, что приведет к нарушению принятого распределения токов 1 и /ш в параллельных ветвях и к недопустимому ослаблению магнитного потока тягового двигателя.
В цепях же с большой индуктивностью при изменении или отключении тока и его последующем включении (например, при отрыве токоприемника от контактного рельса) возникает значительная э. д. с. самоиндукции. Так как э. д. с. направлена против тока и препятствует его протеканию по обмотке возбуждения, то большая часть тока пойдет по шунтирующему резистору, что приведет к нарушению принятого распределения токов 1 и /ш в параллельных ветвях и к недопустимому ослаблению магнитного потока тягового двигателя.
 Какими способами регулируют частоту вращения якоря тягового двигателя?
Какими способами регулируют частоту вращения якоря тягового двигателя?


 е. возрос тормозной момент,
то равновесие моментов будет нарушено, так как тормозной момент окажется
больше вращающего.
е. возрос тормозной момент,
то равновесие моментов будет нарушено, так как тормозной момент окажется
больше вращающего.
 Чтобы результирующий магнитный
поток в машине оставался неизменным при любом изменении нагрузки двигателя,
размагничивающее магнитное поле обмотки ротора должно быть уравновешено
магнитным полем обмотки статора. Поэтому при увеличении тока в обмотке
ротора увеличивается и ток в обмотке статора.
Чтобы результирующий магнитный
поток в машине оставался неизменным при любом изменении нагрузки двигателя,
размагничивающее магнитное поле обмотки ротора должно быть уравновешено
магнитным полем обмотки статора. Поэтому при увеличении тока в обмотке
ротора увеличивается и ток в обмотке статора.

 е. f2
=Sf1.
е. f2
=Sf1.
 е при изменении скольжения в пределах
от 0 до
Sm.
Работа двигателя на нисходящей ветви указанной зависимости, т. е. при
скольжении S > Sm
невозможна, так как не обеспечивается устойчивое
равновесие моментов.
е при изменении скольжения в пределах
от 0 до
Sm.
Работа двигателя на нисходящей ветви указанной зависимости, т. е. при
скольжении S > Sm
невозможна, так как не обеспечивается устойчивое
равновесие моментов. е. равновесие моментов
восстановится.
е. равновесие моментов
восстановится.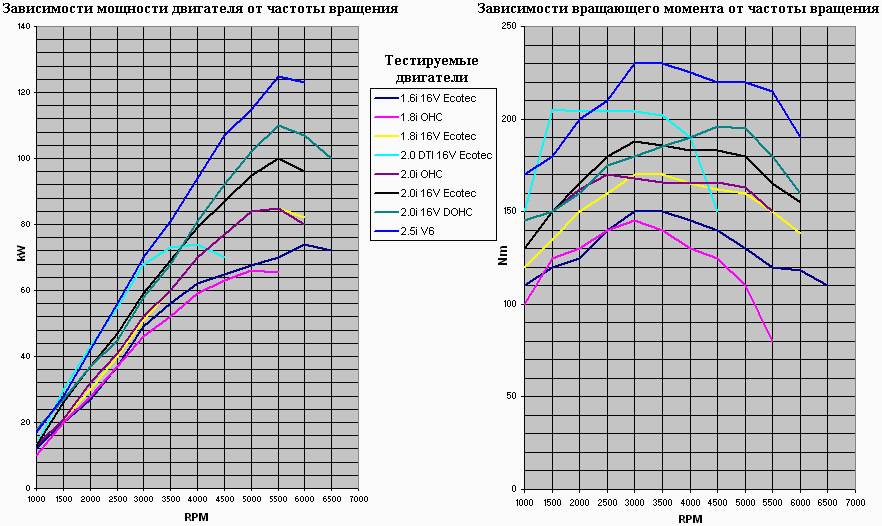


 С увеличением нагрузки на валу двигателя кпд резко увеличивается,
а затем уменьшается. Наибольшего значения кпд достигает при такой нагрузке,
когда потери мощности в стали и механические потери, не зависящие от
нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим
от нагрузки.
С увеличением нагрузки на валу двигателя кпд резко увеличивается,
а затем уменьшается. Наибольшего значения кпд достигает при такой нагрузке,
когда потери мощности в стали и механические потери, не зависящие от
нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим
от нагрузки.


 В запущенных местах, например на колесах, может скапливаться тормозная пыль, стойкий серый осадок, который может выглядеть неприглядно и…
В запущенных местах, например на колесах, может скапливаться тормозная пыль, стойкий серый осадок, который может выглядеть неприглядно и…
 Мощность двигателя измеряется с помощью динамометра, но на самом деле динамометр измеряет выходной крутящий момент двигателя, а также число оборотов в минуту или «оборотов в минуту». Эти числа включены в формулу (крутящий момент x об/мин / 5252) для определения лошадиных сил. Мощность в лошадиных силах определяется путем измерения крутящего момента, потому что крутящий момент легче рассчитать.
Мощность двигателя измеряется с помощью динамометра, но на самом деле динамометр измеряет выходной крутящий момент двигателя, а также число оборотов в минуту или «оборотов в минуту». Эти числа включены в формулу (крутящий момент x об/мин / 5252) для определения лошадиных сил. Мощность в лошадиных силах определяется путем измерения крутящего момента, потому что крутящий момент легче рассчитать. Однако в реальном мире вождения и перевозки их различия — наряду с конструкцией автомобиля — оказывают значительное влияние.
Однако в реальном мире вождения и перевозки их различия — наряду с конструкцией автомобиля — оказывают значительное влияние.