
Регулирование частоты вращения асинхронного двигателя изменением скольжения
Регулирование частоты вращения асинхронного двигателя изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения в соответствии с формулами (32), (34) изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку.
При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется. Для регулирования частоты вращения асинхронного двигателя уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя ( 28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
Рис. 28. Механические характеристики асинхронных двигателей при различных значениях первичного напряжения: а — двигатель нормального исполнения; б — двигатель с повышенным скольжением
Этот метод регулирования частоты вращения асинхронного двигателя применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления для увеличения sкр.
В связи с пониженным КПД и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей относительно малой мощности. При этом для регулирования U 1 можно использовать регулируемые автотрансформаторы или резисторы, включенные последовательно в первичную цепь, а также реакторы насыщения, регулируемые путем подмагничивания постоянным током (магнитные усилители).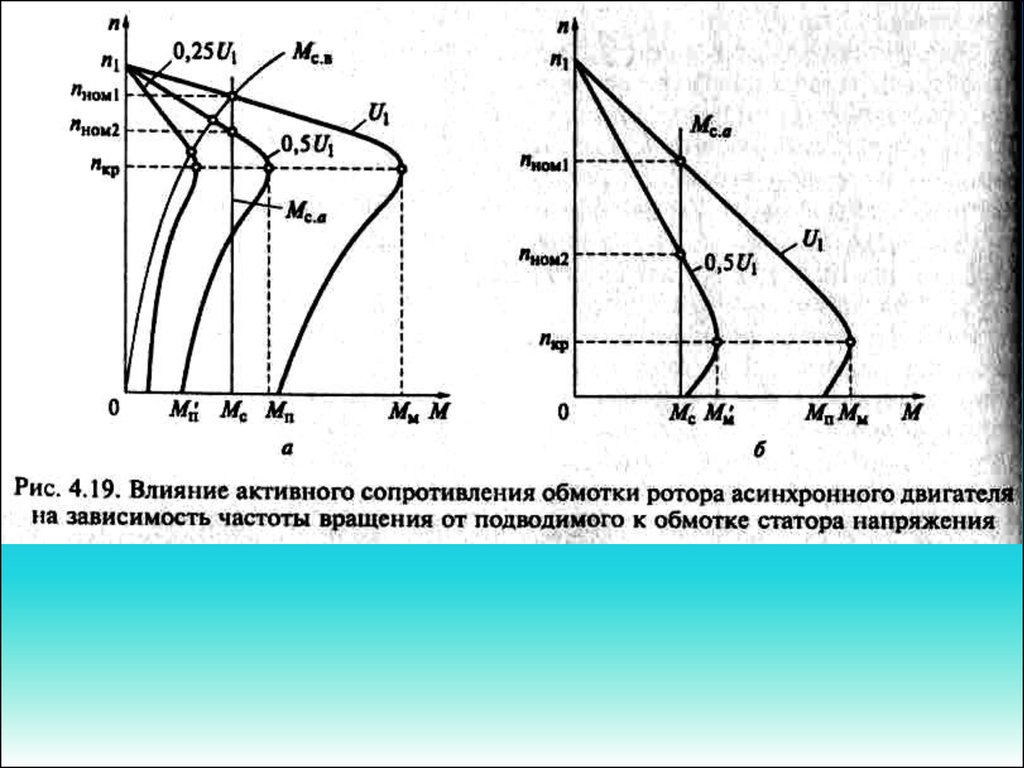 При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
Кроме магнитных усилителей применяются также управляемые и полууправляемые полупроводниковые регуляторы напряжения, также позволяющие в широком диапазоне регулировать приложенное напряжение и осуществлять автоматическое регулирование частоты вращения двигателя.
Частным случаем рассмотренного способа является импульсное регулирование частоты вращения, при котором асинхронный двигатель периодически подключается к сети и отключается от нее. При этом двигатель постоянно находится в переходном режиме ускорения (подключен к сети) или торможения (отключен от сети). Подбирая соотношение времени включения ко времени отсутствия питания, можно регулировать среднюю частоту вращения двигателя в широком диапазоне.
При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Мmах (см. рис. 22). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если асинхронный двигатель работает с некоторым приводимым механизмом на валу со статическим моментом сопротивления Мс (см. рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления М
Технические показатели данного способа регулирования следующие:
- диапазон регулирования сравнительно небольшой — порядка 2 : 1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд;
- плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования. Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Кроме реостатного регулирования применяется регулирование частоты вращения путем введения добавочной ЭДС в обмотку ротора асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения Ps= sPэм, большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом КПД установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам ротора двигателя приемник электрической энергии в виде вспомогательной электрической машины. Эта машина должна работать в режиме двигателя, обеспечивая требуемое напряжение на своих зажимах (и соответственно на контактных кольцах самого асинхронного двигателя).
Поясним, как влияет на работу асинхронного двигателя введение добавочной ЭДС Eд в обмотку ротора, при условии, что частота Eд всегда равна частоте токов ротора f2 = sf
Пусть в отсутствие ЭДС Eд по цепи ротора протекает ток I2, определяемый в соответствии с формулой (25) как I2=sE2/(r2+jsx2). Этот ток, взаимодействуя с полем обмотки статора, создает электромагнитный момент М, численно равный моменту сопротивления нагрузки Мс, так что двигатель работает при некоторой частоте вращения n.
Если теперь во вторичную цепь ввести ЭДС Eд встречно ЭДС скольжения E2s в этой же цепи, то вторичный ток
(56)
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s увеличиваться. При этом согласно равенству (56) ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=М с. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Предположим теперь, что ЭДС Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с ЭДС sE2. Тогда вместо (56) получаем
(57)
В первый момент после введения ЭДС Eд ток I2 и момент М возрастут, асинхронный двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Eд, все еще будет велик по сравнению с током, необходимым для создания момента М=Mс, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и ЭДС E векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
Таким образом, с помощью добавочной ЭДС Eд путем изменения ее значения и направления можно осуществить плавное двухзонное регулирование частоты вращения двигателя ниже и выше синхронной.
Реализация этого весьма экономичного способа регулирования частоты вращения сопряжена с усложнением схемы регулирования и требует применения электромеханического (электромашинного) или вентильного каскада для преобразования выделяемой при регулировании мощности потерь скольжения в полезную электрическую или механическую мощность. Каскадные установки выполняются на мощности до тысяч киловатт с диапазоном регулирования частоты вращения порядка 3 : 1.
Регулирование частоты вращения асинхронного двигателя производят несколькими способами.

Различные условия работы асинхронного двигателя принуждают ускорять или замедлять машину. При необходимости произвести регулировку частоты вращения применяют несколько методов. Каждому из них соответствуют свои рабочие характеристики. В этой статье детально разберем этапы переключения скоростей.
Содержание
1. Введение. Типы асинхронных двигателей.
2. Регулировка частоты вращения.
3. Скорость трехфазного двигателя.
4. Многомощные трехфазные двигатели.
5. Скорость однофазного двигателя.
6. Заключение.
ВВЕДЕНИЕ. ТИПЫ АСИНХРОННЫХ ДВИГАТЕЛЕЙ.
Асинхронные машины получили наиболее широкое распространение. Они просты, надежны в работе, могут совмещать режимы двигателя и генератора. Подобными моторами оснащают огромное количество устройств: от бытовой техники и электроинструмента до тяговых установок и электротранспорта. Мощность асинхронного движка колеблется от нескольких долей до тысячей ватт. Чаще применяются трехфазные двигатели, работающие от производственной частоты в 50 Гц напряжением 220в, 380в, 660в. Однофазные моторы подключаются к 220 вольт.
Чаще применяются трехфазные двигатели, работающие от производственной частоты в 50 Гц напряжением 220в, 380в, 660в. Однофазные моторы подключаются к 220 вольт.
Однофазные двигатели конструктивно состоят из двух обмоток. Одна — рабочая, вторая — фазосдвигающая. Первая запитывается напрямую к сети, другая через индуктор, сдвигающий фазу на угол 90 градусов. Вследствие появляется магнитное поле вращения. Иногда такие приводы называют двухфазными или конденсаторными.
Трехфазные слагаюся из неподвижного статора с тремя намотками и движимого ротора, имеющего различное строение. Магнитные поля обмоток сдвинуты на 120 градусов. При подаче трехфазного U появляется перемещающееся по кругу магнитное поле. На основе его появления продуцируется ток в роторной катушке. Ее поле и индукционное в момент вращения статичны соответственно друг другу. При работе в однофазной сети мощность устройства падает в два раза.
РЕГУЛИРОВКА ЧАСТОТЫ ВРАЩЕНИЯ.
Неконтролируемое движение опасно. Всегда есть моменты, где необходимо ускориться, а где снизить обороты.
Всегда есть моменты, где необходимо ускориться, а где снизить обороты.
Вследствие конструктивных функций асинхронных двигателей существуют соответствующие алгоритмы регулировки скорости.
Темп вращения ротора задается изменением трех величин: количества полюсов обмотки возбуждения, скольжением, частоты тока в обмотке конденсатора.
СКОРОСТЬ ТРЕХФАЗНОГО ДВИГАТЕЛЯ.
Сперва перечислим алгоритмы для трехфазного агрегата.
Путем смены скольжения.
Эта схема применяется только для двигателей под нагрузкой. В свою очередь способ делится на подвиды:
-смена напряжения, которое подается на обмотку статора;
-искажением симметрии трехфазной системы данного напряжения;
-изменением рабочего сопротивления на якорной обмотке.
Изменение показателя сетевого напряжения.
При стабильной нагрузке добавочное напряжение дает рост частоты вращения. К сожалению, диапазон регулировки небольшой. При непомерном введении разности потенциалов происходит нагревание двигателя с быстрым увеличением физических потерь (магнитных и электрических). С уменьшением напряжения возникает ослабление тяги. Амплитуда получается шире в моторах с усиленным сопротивлением роторной обмотки. Допускается только возможность смены U вниз от номинального, так как подводить напряжение выше максимального категорически запрещено. Итог: со снижением показателя скорости вращения также снижается частота вращения, величина скольжения и силы тока возрастают. Возникающие потери уменьшают КПД, что особенно заметно на низких оборотах. Если прибавить дополнительные потери в обмотке ротора, то КПД падает в два раза. Напряжение сети можно изменить замкнутым магнитопроводом — дросселем насыщения. Гораздо рациональнее применить тиристорный регулятор, контролируемый при постоянном силе тока. Им управляет импульсный блок. Тиристоры заменимы симисторами, что, в свою очередь, позволяют течь току в обоих направлениях.
При непомерном введении разности потенциалов происходит нагревание двигателя с быстрым увеличением физических потерь (магнитных и электрических). С уменьшением напряжения возникает ослабление тяги. Амплитуда получается шире в моторах с усиленным сопротивлением роторной обмотки. Допускается только возможность смены U вниз от номинального, так как подводить напряжение выше максимального категорически запрещено. Итог: со снижением показателя скорости вращения также снижается частота вращения, величина скольжения и силы тока возрастают. Возникающие потери уменьшают КПД, что особенно заметно на низких оборотах. Если прибавить дополнительные потери в обмотке ротора, то КПД падает в два раза. Напряжение сети можно изменить замкнутым магнитопроводом — дросселем насыщения. Гораздо рациональнее применить тиристорный регулятор, контролируемый при постоянном силе тока. Им управляет импульсный блок. Тиристоры заменимы симисторами, что, в свою очередь, позволяют течь току в обоих направлениях.
Регулировка скорости сдвигом симметрии подающего напряжения.
При подобном нарушении U трехфазной системы наблюдается эллиптическое искажение магнитного поля статора. Появляется дополнительное поле, направленное встречно основному. Образуется добавочный момент насупротив основному моменту вращения. В результате общий М двигателя уменьшается. Этот метод позволяет снизить скорость ниже номинальной. Возможно включить добавочный однофазный трансформатор. Узкий диапазон регулировки снижает КПД при росте асимметрии. Способ применим для маломощных моторов.
Смена активного сопротивления в цепи ротора. Реостатное регулирование.
Схема применима лишь для фазного ротора. Устанавливают добавочный реостат. При подъеме сопротивления скольжение увеличивается, а частота падает. Наблюдается рост физических потерь и снижение КПД.
Преобразование частоты подающего напряжения.
Дополнительно требуется источник питания с переменным током и регулировки его собственной частоты. Здесь подходят герцевые импульсные преобразователи. Плавная смена оборотов запрашивает перемену силы тока, но это вызывает изменение момента и тяговых показателей двигателя. Для сохранения значений на постоянном уровне требуется единовременно изменять импульсное напряжение, которое подается на намотку статора. Наибольшее применение в конверсии напряжения нашли тиристорные частотные преобразователи (ТПЧ), состоящие из выпрямителя и инвертора. Управляются тиристоры импульсно-фазовым блоком.
Здесь подходят герцевые импульсные преобразователи. Плавная смена оборотов запрашивает перемену силы тока, но это вызывает изменение момента и тяговых показателей двигателя. Для сохранения значений на постоянном уровне требуется единовременно изменять импульсное напряжение, которое подается на намотку статора. Наибольшее применение в конверсии напряжения нашли тиристорные частотные преобразователи (ТПЧ), состоящие из выпрямителя и инвертора. Управляются тиристоры импульсно-фазовым блоком.
Частотное регулирование изменением количества полюсов в обмотке статора.
Обладает ступенчатой характеристикой. Различают 2 способа:
-укладка двух намоток с различным количеством полюсов;
-добавление одной или двух обмоток, структура которых дает возможность переключением секционных групп получить разное количество полюсов. Второй прием наиболее применим.
«Звезда-двойная звезда».
Изменяет количество полюсных пар в соотношении 2:1. Алгоритм дает асинхронному двигателю режим работы с постоянным моментом. Мощность здесь обратно пропорциональна скорости вращения двигателя. Применяется в приводе с непрерывно действующим статическим моментом.
Алгоритм дает асинхронному двигателю режим работы с постоянным моментом. Мощность здесь обратно пропорциональна скорости вращения двигателя. Применяется в приводе с непрерывно действующим статическим моментом.
«Звезда-звезда».
Технология представлена сменой полюсных пар в соотношении 2:1. Манипуляция обеспечивает редуктору постоянную мощность при двойном снижении момента. Достоинство этого приема в устойчивом неизменном КПД на всех этапах переключения. Однако, применение дополнительных коммутирующих устройств приводит к подорожанию двигателя.
Такая регулировка применяется только в АД с короткозамкнутым ротором, поскольку количество полюсов ротора и статора одинаково, чтобы изменить частоту вращения вполне хватает сменить число полюсов в обмотке конденсатора.
Импульсная настройка.
Виды алгоритмов:
-обмотка статора периодически включается и выключается из сети
-резисторы, соединенные последовательно в цепи фазного ротора или индуктора, периодически шунтируются.
МНОГОМОЩНЫЕ ТРЕХФАЗНЫЕ ДВИГАТЕЛИ.
Двигатель все время находится в промежуточном режиме повышения и снижения скорости вращения. Импульсную регулировку возможно получить установкой контактора. Схема ненадежна — контакты быстро выходят из строя. Лучше установить бесконтактную аппаратуру, например, тиристорный ключ.
Отдельно следует отметить асинхронные двигатели в 22 кВт. Они подразумевают длительную работу с постоянной нагрузкой. Изоляционное покрытие обмоток статора выдерживает до 150 градусов Цельсия. КПД 90,5%. Конструкция зависит от способа монтажа. Для подключения к 220в применяют схемы «звезда» и «треугольник».
«Звезда» дает плавный пуск, надежность, стойкость к коротким перегрузкам. При таком подключении мотор работает на полную мощь. Принцип: начало статорных обмоток подключается к фазам, концы соединяются в одной точке, затем на начало напряжения.
«Треугольник» задает повышение вращающего момента, максимальную мощь и увеличение тяги. Электродвигатель функционирует мягче и плавнее. Недостаток — нагревание корпуса агрегата.
Электродвигатель функционирует мягче и плавнее. Недостаток — нагревание корпуса агрегата.
Как третий вариант — комбинированное подключение. «Звезда» обеспечивает плавное включение, «треугольник» — заявленную мощность.
Требуется подбор пропорциональных надежных контроллеров.
Для многомощных движков регулировка угловой скорости особо важна. Функционально применимы вышеизложенные методы. От заявленных номинальных показателя ампеража редуктора зависит подбор соответствующего частотного датчика вращения.
СКОРОСТЬ ОДНОФАЗНОГО ДВИГАТЕЛЯ.
Однофазные асинхронные двигатели работают от 220в. Регулировка скорости:
Смена напряжения, подающегося на двигатель.
Связано с изменением показателя скольжения. Способ дает малый диапазон регулировки, только в сторону уменьшения частоты за счет уменьшения напряжения. Метод применим для маломощных двигателей с вентиляционной нагрузкой. Дополнительно устанавливают аппаратуру:
-автоматические трансформаторы для многоступенчатой регулировки;
-тиристорный контроллер при активной нагрузке редукторов малой мощности;
-транзисторный стабилизатор, работающий по принципу широтно-импульсного модулятора.
Изменение частоты подающего напряжения.
Этот схема является основной. Порядок осуществляется специальными частотными преобразователями для однофазных двигателей и трехфазными инверторами с устранением конденсатора.
ЗАКЛЮЧЕНИЕ.
Выбирая двигатель, отдайте предпочтение фирменным магазинам и надежным дистрибьюторам. Установка качественного оборудования — залог успешной долгосрочной эксплуатации. Лучшими производителями принято считать компании Siemens, WEG, Mitsubishi, TECO, Motovario, Hitachi. Приняв решение приобрести двигатель любого завода-изготовителя, необходимо помнить о соответствующем дополнительном регулирующем оборудовании.
Различные типы методов управления скоростью асинхронного двигателя
Управление скоростью вращения асинхронного двигателя очень важно в промышленности. Трехфазные асинхронные двигатели являются одним из наиболее часто используемых типов двигателей в электротехнической промышленности. Поскольку скорость асинхронных двигателей постоянна, трудно контролировать скорость этого типа двигателя. В асинхронных двигателях управление скоростью также зависит от эффективности этого двигателя. Таким образом, для управления этими асинхронными двигателями используются различные типы методов управления скоростью. Эти методы управления скоростью можно в основном разделить на части с учетом расположения двигателя. Ниже приведены два типа устройства управления, которые необходимо учитывать при управлении асинхронными двигателями.
Трехфазные асинхронные двигатели являются одним из наиболее часто используемых типов двигателей в электротехнической промышленности. Поскольку скорость асинхронных двигателей постоянна, трудно контролировать скорость этого типа двигателя. В асинхронных двигателях управление скоростью также зависит от эффективности этого двигателя. Таким образом, для управления этими асинхронными двигателями используются различные типы методов управления скоростью. Эти методы управления скоростью можно в основном разделить на части с учетом расположения двигателя. Ниже приведены два типа устройства управления, которые необходимо учитывать при управлении асинхронными двигателями.
- управление скоростью асинхронного двигателя относительно стороны ротора двигателя
- управление скоростью асинхронного двигателя относительно стороны статора двигателя.
Управление скоростью асинхронного двигателя относительно статора
Управление скоростью асинхронного двигателя с учетом управления на стороне статора также может подразделяться на несколько методов управления скоростью, таких как.
- Путем изменения напряжения питания двигателя
- Изменение количества полюсов статора двигателя
- Изменение частоты стороны питания двигателя
Изменением напряжения питания двигателя
Произведение крутящего момента трехфазного асинхронного двигателя может отображаться уравнение показано ниже.
Так и Е (эдс индуктивности) прямо пропорциональна напряжению питания двигателя. Таким образом, изменяя напряжение питания асинхронного двигателя, можно управлять крутящим моментом и скоростью вращения асинхронного двигателя.
Путем изменения частоты со стороны питания двигателя
f = частота со стороны питания двигателя
P = число полюсов статора в двигателе
Ns = синхронная скорость двигателя
Синхронная скорость асинхронного двигателя зависит от количества полюсов двигателя со стороны статора и частоты двигателя со стороны питания. Таким образом, изменяя частоту питания двигателя, вы можете контролировать скорость двигателя. Частоту управления несколько сложно сравнить с другими методами управления двигателем.
Таким образом, изменяя частоту питания двигателя, вы можете контролировать скорость двигателя. Частоту управления несколько сложно сравнить с другими методами управления двигателем.
Изменение количества полюсов статора двигателя
f = частота стороны питания двигателя
P = количество полюсов статора в двигателе 9000 3
Ns = синхронная скорость двигателя
Поскольку вы можете видеть в этом уравнении, количество полюсов статора в двигателе напрямую связано со скоростью асинхронного двигателя.
Таким образом, изменив количество полюсов статора, можно также изменить скорость асинхронного двигателя.
Управление скоростью асинхронного двигателя относительно стороны ротора двигателя.
Управление скоростью асинхронного двигателя с учетом управления на стороне ротора также можно разделить на несколько методов управления скоростью, таких как.
- Добавление внешнего сопротивления в цепь со стороны ротора
- Применение каскадного соединения
- Введение ЭДС в цепь со стороны ротора двигателя
Добавление внешнего сопротивления в цепь со стороны ротора
Произведение крутящего момента трехфазного асинхронного двигателя можно определить по приведенному ниже уравнению.
Итак, из этого уравнения мы можем узнать, что
Таким образом, крутящий момент асинхронного двигателя косвенно пропорционален сопротивлению стороны ротора. Добавление внешнего сопротивления в ротор может уменьшить крутящий момент двигателя и увеличить его скорость.
Применение каскадного соединения
В этом каскадном методе управления скоростью асинхронного двигателя два двигателя устанавливаются на одном валу двигателя и работают с одинаковой скоростью.
Один двигатель подключен к трехфазному питанию, а другой работает от ЭДС подачи первого двигателя через токосъемные кольца.
С помощью этого метода можно применять различные скорости для асинхронного двигателя и управления скоростью.
Ввод ЭДС в боковую цепь ротора двигателя
В этом индукционном методе управления скоростью двигателя внешнее напряжение добавляется в цепь ротора двигателя, и частота должна быть такой же, как частота скольжения.
Таким образом, введение ЭДС в противоположную фазу ротора увеличивает сопротивление ротора. Таким образом, этот метод можно использовать для управления скоростью асинхронного двигателя.
Надеюсь, вы хорошо разберетесь в методах согласования скорости, применяемых в асинхронном двигателе.
анализ цепи — Управление скоростью асинхронного двигателя PSC, как это на самом деле работает?
Некоторые предположения:
- Если этот тип двигателя используется во многих потолочных и коробчатых вентиляторах (PSC или экранированный полюс),
- И они не меняют расположение полюсов,
- А обмотки буквально только что, лишние витки на тех же полюсах, то:
Кривая крутящего момента одинакова для всех трех настроек, только масштабирована по вертикали. Это отражено на диаграмме:
Высота синей кривой пропорциональна приложенному напряжению. Работа с большим коэффициентом понижения снижает напряжение на статоре, уменьшая кривую крутящего момента.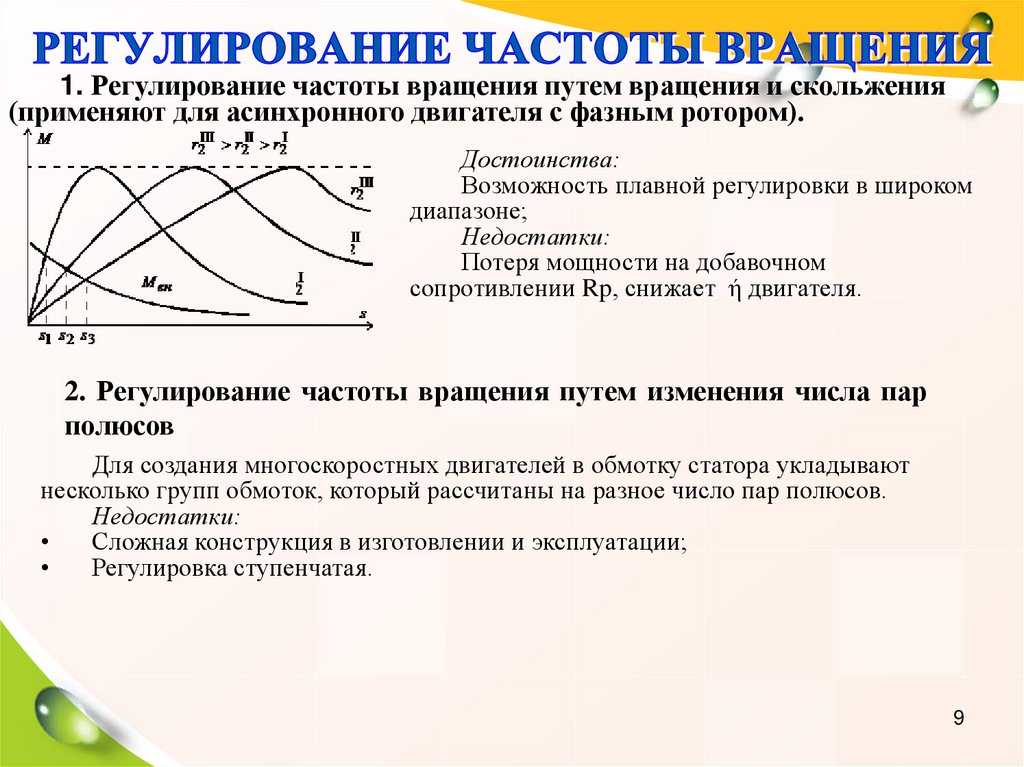
Кривая нагрузки в любом случае одинакова (красная), определяется винтом и средой, которую он толкает (воздух).
Кривые пересекаются в разных точках, поэтому будут видны разные установившиеся скорости.
Вопрос об автотрансформаторе решается предположением №3. В этом случае «высокий» отвод будет иметь более низкое напряжение, когда «низкий» питается; и наоборот, когда «высокий» питается, «низкий» ответвитель будет иметь немного более высокое напряжение! Какие именно соотношения, я понятия не имею; это определяется желаемыми настройками скорости производителя.
Это предположение также охватывает вопрос о связи: «дополнительные» являются продолжением «основной» обмотки на тех же полюсах. Обмотка «вспомогательная» выполнена на противоположных полюсах.
Нагрузка — ротор; конденсатор обеспечивает только фазовый сдвиг и сам по себе не является (реальной) нагрузкой. (Считается ли конденсатор нагрузкой, зависит от контекста: он, безусловно, потребляет ток, то есть является нагрузкой в этом смысле.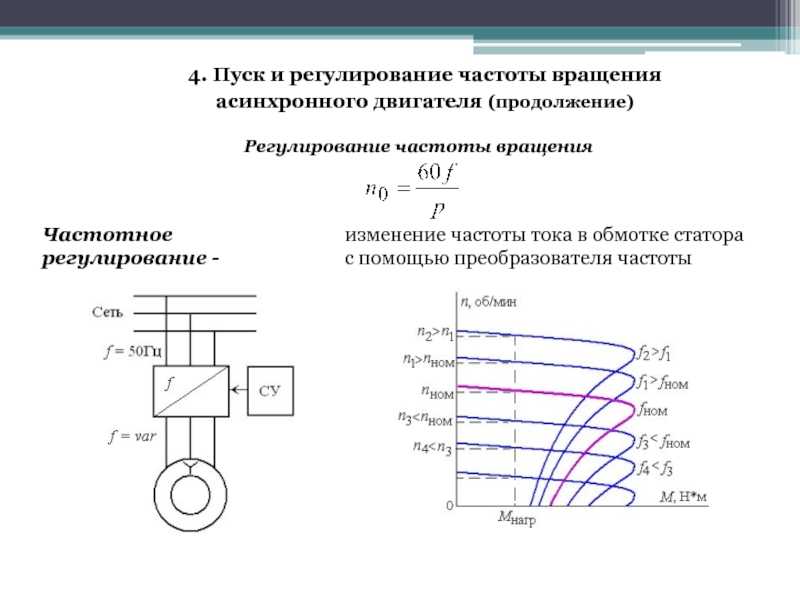 Но этот ток не совпадает по фазе: он не рассеивает мощность, нагружая генераторы энергетической компании в переменный ток такой странный и чудесный.) Нагрузка сама по себе лишь слегка индуктивная (ротор с «беличьей клеткой», имеющий очень низкое сопротивление, действующий как короткозамкнутый виток), а баланс индуктивности обусловлен утечкой обмотки. и собственной индуктивности.
Но этот ток не совпадает по фазе: он не рассеивает мощность, нагружая генераторы энергетической компании в переменный ток такой странный и чудесный.) Нагрузка сама по себе лишь слегка индуктивная (ротор с «беличьей клеткой», имеющий очень низкое сопротивление, действующий как короткозамкнутый виток), а баланс индуктивности обусловлен утечкой обмотки. и собственной индуктивности.
Из-за высокого проскальзывания КПД и особенно коэффициент мощности будут особенно низкими при низких настройках; но это несколько не по делу. Более того, это не обязательно должно быть связано с сопротивлением обмотки. (Это был бы адекватный метод, и я думаю, что он использовался в прошлом. Очевидно, что это очень низкая эффективность.) Коэффициент мощности можно исправить, подключив конденсатор параллельно (хотя вам потребуется разное значение для каждого отвода). , подключенный к отдельному полюсу выключателя), но на практике бесполезен.
Пояснение к магнетизму: плотность потока пропорциональна приложенному напряжению и обратно пропорциональна частоте.