Регулирование частоты вращения асинхронного двигателя изменением скольжения
Регулирование частоты вращения асинхронного двигателя изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения в соответствии с формулами (32), (34) изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку.
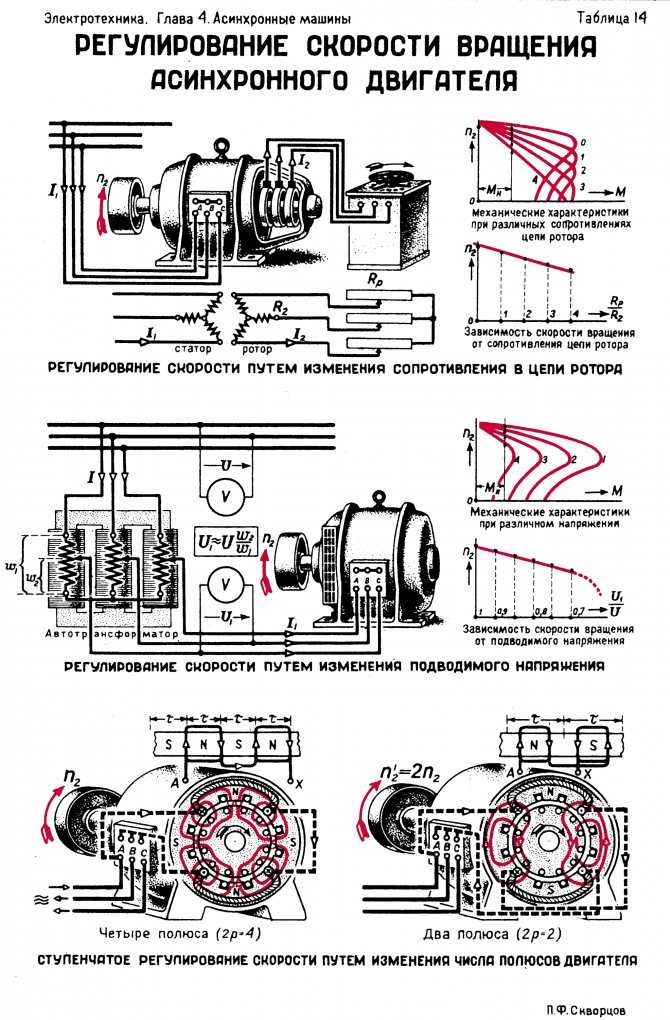
При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется. Для регулирования частоты вращения асинхронного двигателя уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя ( 28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
Рис. 28. Механические характеристики асинхронных двигателей при различных значениях первичного напряжения: а — двигатель нормального исполнения; б — двигатель с повышенным скольжением
Этот метод регулирования частоты вращения асинхронного двигателя применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления для увеличения sкр.
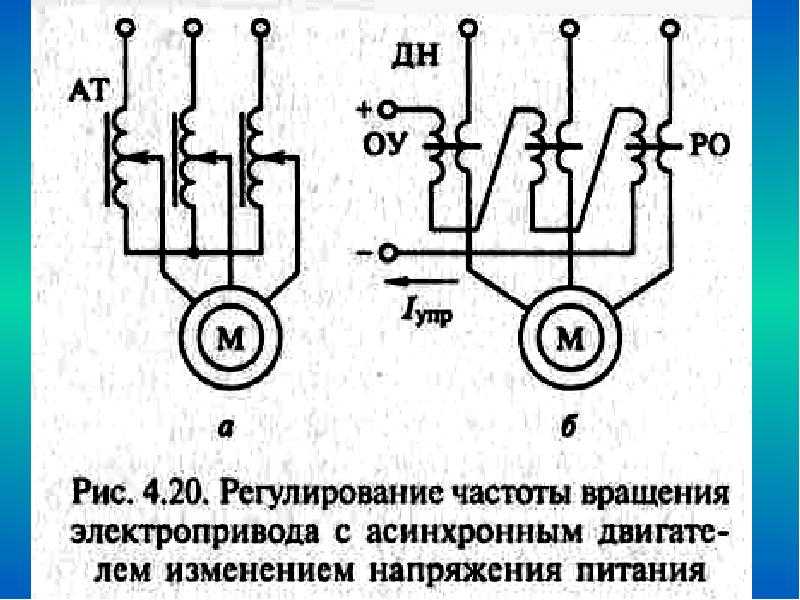
В связи с пониженным КПД и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей относительно малой мощности. При этом для регулирования U 1 можно использовать регулируемые автотрансформаторы или резисторы, включенные последовательно в первичную цепь, а также реакторы насыщения, регулируемые путем подмагничивания постоянным током (магнитные усилители). При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
Кроме магнитных усилителей применяются также управляемые и полууправляемые полупроводниковые регуляторы напряжения, также позволяющие в широком диапазоне регулировать приложенное напряжение и осуществлять автоматическое регулирование частоты вращения двигателя.
Частным случаем рассмотренного способа является импульсное регулирование частоты вращения, при котором

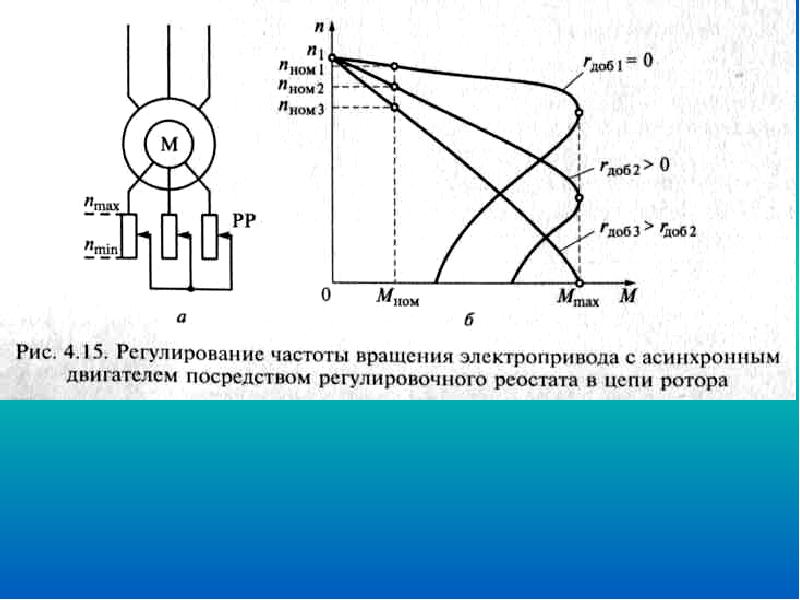
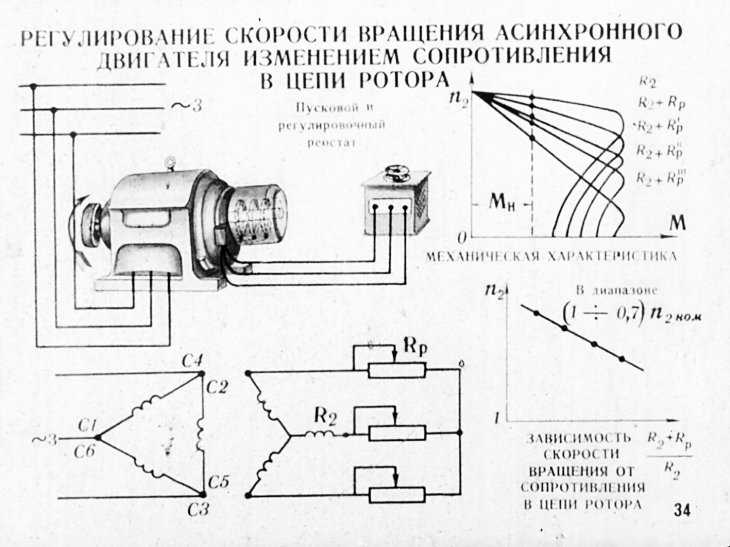
При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Мmах (см. рис. 22). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если асинхронный двигатель работает с некоторым приводимым механизмом на валу со статическим моментом сопротивления Мс (см. рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления М
Технические показатели данного способа регулирования следующие:
- диапазон регулирования сравнительно небольшой — порядка 2 : 1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд;
- плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования. Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Кроме реостатного регулирования применяется регулирование частоты вращения путем введения добавочной ЭДС в обмотку ротора асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя
путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения Ps= sPэм, большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом КПД установки.Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам ротора двигателя приемник электрической энергии в виде вспомогательной электрической машины. Эта машина должна работать в режиме двигателя, обеспечивая требуемое напряжение на своих зажимах (и соответственно на контактных кольцах самого асинхронного двигателя).
Поясним, как влияет на работу асинхронного двигателя введение добавочной ЭДС Eд в обмотку ротора, при условии, что частота Eд всегда равна частоте токов ротора f2 = sf1.
Пусть в отсутствие ЭДС Eд по цепи ротора протекает ток I2, определяемый в соответствии с формулой (25) как I2=sE2/(r2+jsx2). Этот ток, взаимодействуя с полем обмотки статора, создает электромагнитный момент М, численно равный моменту сопротивления нагрузки Мс, так что двигатель работает при некоторой частоте вращения n.
Если теперь во вторичную цепь ввести ЭДС Eд встречно ЭДС скольжения E2s в этой же цепи, то вторичный ток
(56)
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s увеличиваться. При этом согласно равенству (56) ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=М с. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Предположим теперь, что ЭДС Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с ЭДС sE2. Тогда вместо (56) получаем
(57)
В первый момент после введения ЭДС Eд ток I2 и момент М возрастут, асинхронный двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Eд, все еще будет велик по сравнению с током, необходимым для создания момента М=Mс, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и ЭДС E векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
Таким образом, с помощью добавочной ЭДС Eд путем изменения ее значения и направления можно осуществить плавное двухзонное регулирование частоты вращения двигателя ниже и выше синхронной.
Реализация этого весьма экономичного способа регулирования частоты вращения сопряжена с усложнением схемы регулирования и требует применения электромеханического (электромашинного) или вентильного каскада для преобразования выделяемой при регулировании мощности потерь скольжения в полезную электрическую или механическую мощность. Каскадные установки выполняются на мощности до тысяч киловатт с диапазоном регулирования частоты вращения порядка 3 : 1.
Справочные материалы о кондиционерах
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
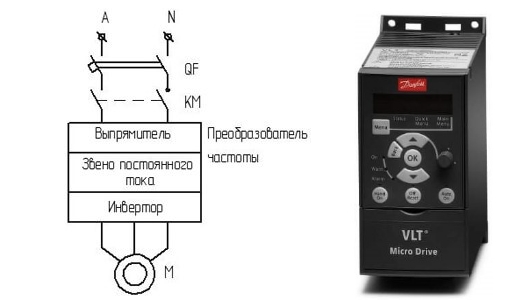
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.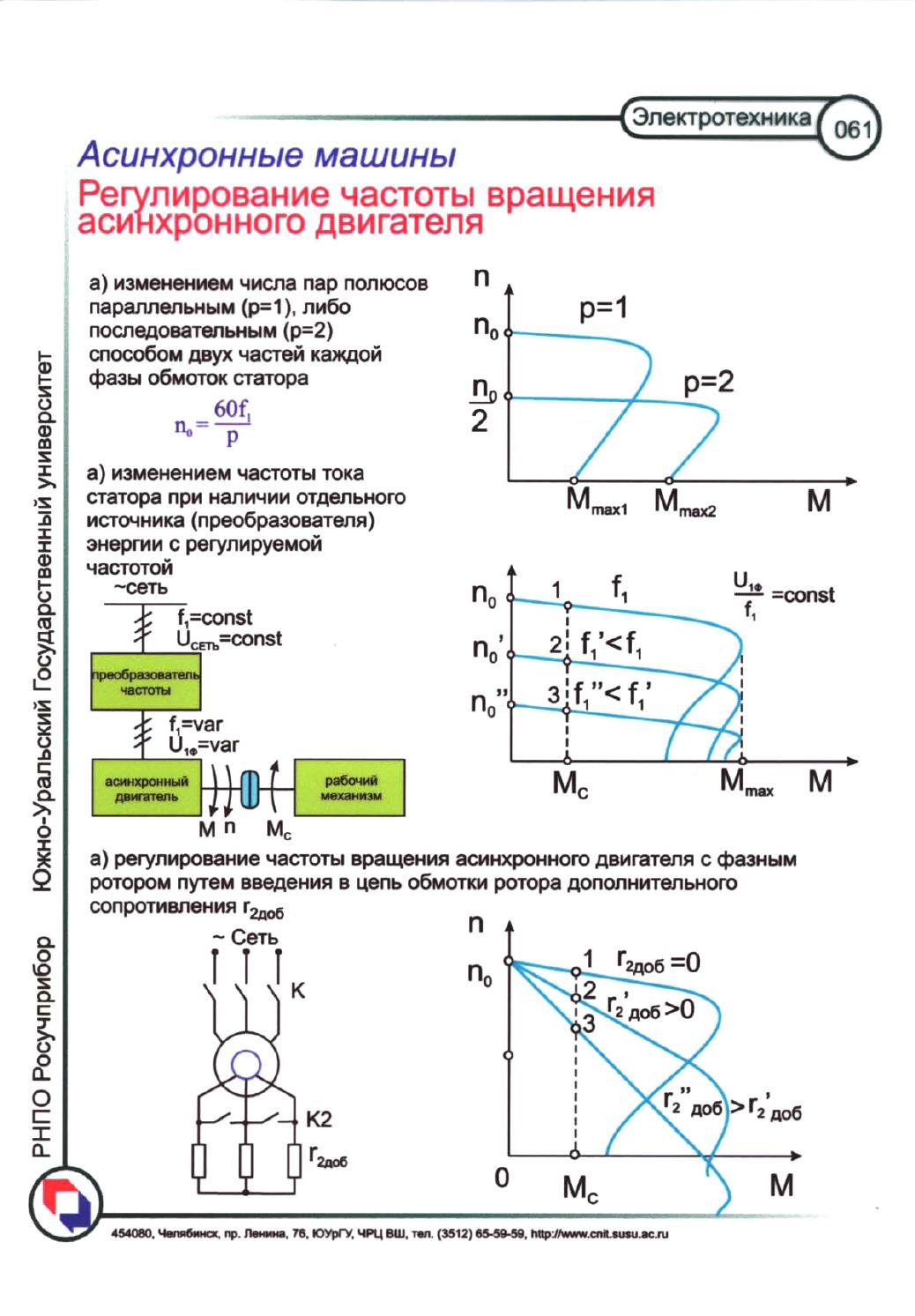
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Формула и методы [Примечания GATE]
Серия испытаний
Автор: Aina Parasher|Обновлено: 7 ноября 2022 г. Однако скорость асинхронного двигателя может изменяться за счет изменения его синхронной скорости и скольжения. Для асинхронного двигателя с короткозамкнутым ротором скорость можно регулировать только через статор, но для асинхронного двигателя с контактными кольцами его скорость можно регулировать через статор и его ротор.
Управление скоростью асинхронного двигателя PDF [Примечания GATE]
Управление скоростью асинхронного двигателя осуществляется за счет потери эффективности и низкого коэффициента мощности. Здесь мы подробно рассмотрим управление скоростью асинхронного двигателя и обсудим различные методы управления скоростью, которые можно использовать.
Загрузить полные примечания к формуле теории сетей в формате PDF
Содержание
- 1.
 Управление скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя - 2. Методы управления скоростью асинхронного двигателя
- 3. Метод управления напряжением
- 4. Метод управления частотой
- 5. Управление скоростью переключения полюсов
- 6. Метод сопротивления статора
- 7. Метод управления сопротивлением ротора
- 8. Метод восстановления мощности скольжения 9. Каскадирование или тандемное соединение
Прочитать статью полностью
Управление скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя осуществляется для изменения токов в асинхронном двигателе для управления скоростью. Выражение для скорости (N) асинхронного двигателя равно
N=N с (1−с)
Следовательно, мы можем получить контроль над скоростью, изменяя ее синхронную скорость (N с ) или изменяя ее скольжение (с). Синхронная скорость асинхронного двигателя зависит от частоты питания и числа полюсов статора. Крутящий момент асинхронного двигателя во время работы определяется выражением
Крутящий момент асинхронного двигателя во время работы определяется выражением
T=[3×60/2πN с ]×sE 2 2 R 2 /R 2 2 ) 2
Следовательно, для данного крутящего момента и нагрузки мы можем изменять напряжение и сопротивление ротора, чтобы изменять скольжение для управления скоростью асинхронного двигателя.
Методы управления скоростью асинхронного двигателя
Со стороны статора мы можем получить управление скоростью асинхронного двигателя, используя следующие методы, а именно.
- Метод управления напряжением
- Метод управления частотой
- Метод переключения полюсов
- Метод сопротивления статора
Со стороны ротора регулирование скорости асинхронного двигателя может быть достигнуто следующими методами.
- Метод управления сопротивлением ротора
- Метод рекуперации мощности скольжения
- Каскадное (или) тандемное соединение
Кратко обсудим эти методы управления скоростью асинхронного двигателя.
В этом методе управления скоростью асинхронного двигателя напряжение питания изменяется с помощью автотрансформатора. Практически мы не можем увеличить уровни напряжения сверх номинального напряжения, так как напряжение изоляции увеличится и приведет к повреждению изоляции.
T = [3 × 60 /2πn S ] × SE 2 2 R 2 /R 2 2 +(SX 2 ) 2
9000. скольжение крошечное; следовательно, (sX 2 ) 2 можно пренебречь⇒T 𝛼 sE 2 2
А ЭДС, индуцируемая в роторе, пропорциональна напряжению (E 6 2 ) ⇒T 𝛼 sV 2 2 Из приведенного выше уравнения видно, что крутящий момент также падает при снижении напряжения питания. Плотность потока сердечника статора обратно пропорциональна применяемой частоте. Чтобы уменьшить потери в сердечнике и улучшить работу двигателя, максимальная плотность потока (B m ) должна поддерживаться постоянной. B м 𝛼 V/f Итак, чтобы поддерживать максимальную плотность потока постоянной, мы должны изменять напряжение и частоту. Этот метод невозможен для частот выше номинальной частоты, поскольку необходимо также увеличить напряжение, что невозможно из-за ограничений по изоляции. Этот метод управления скоростью асинхронного двигателя может применяться только к асинхронному двигателю с короткозамкнутым ротором. Число полюсов в роторе асинхронного двигателя с контактными кольцами фиксировано, тогда как ротор с короткозамкнутым ротором может быть адаптирован к любому числу полюсов. Полюса асинхронного двигателя можно менять двумя способами. В первом методе мы используем несколько наборов обмоток статора, предназначенных для разных наборов полюсов. Во время работы любой из них может быть подключен в соответствии с требованиями скорости пользователя, а другие наборы останутся открытыми. N с =120f/P По мере увеличения числа полюсов скорость будет уменьшаться. Этот метод может изменять скорость только ступенчато, и он требует больших затрат, поскольку включает несколько обмоток статора. В методе последовательной смены полюсов мы можем получить другой набор полюсов, поменяв местами катушки. Этот метод может дать только два набора скоростей. Этот метод управления скоростью асинхронного двигателя аналогичен методу управления напряжением. Он требует последовательного включения трех реостатов с каждой фазой обмотки статора для снижения напряжения и достижения требуемой скорости. Поскольку из-за реостатов возникают некоторые потери мощности, этот метод будет предпочтительнее для машин с низким номиналом в течение небольшой продолжительности. Этот метод более выгоден при пуске, чем регулирование скорости. Этот метод управления скоростью асинхронного двигателя возможен только для асинхронного двигателя с контактными кольцами, поскольку мы не можем получить доступ к ротору асинхронного двигателя с короткозамкнутым ротором. T=[3×60/2πN s ]×sE 2 2 R 2 /R 2 2 +(sX 2 ) 2 При заданном напряжении статора ЭДС, индуцируемая в роторе E 2 , постоянна, и во время работы скольжение незначительно; следовательно, (sX 2 ) 2 можно пренебречь. ⇒T 𝛼 s/R 2 Но для поддержания постоянного момента нагрузки скорость ротора будет уменьшаться, а скольжение увеличиваться. Поскольку рабочее скольжение увеличивается, этот метод неэффективен и непригоден для широкого круга приложений. Основное преимущество этого метода заключается в том, что пусковой момент увеличивается при добавлении внешнего сопротивления, но он также имеет существенные недостатки. В этом методе управления скоростью асинхронного двигателя внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf) для получения установившегося крутящего момента. Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Мы знаем, что T 𝛼 sE 2 2 Если напряжение ротора увеличить, крутящий момент увеличится; впоследствии скорость вращения ротора увеличится, а скольжение уменьшится. Во втором способе уменьшаем напряжение в роторе, тогда уменьшится момент, увеличится скорость, уменьшится скольжение. Привод Шербиуса является лучшим примером такого рода операций. В этом методе управления скоростью асинхронного двигателя нам нужны два асинхронных двигателя, один из которых представляет собой асинхронный двигатель с контактными кольцами, а другой представляет собой либо асинхронный двигатель с контактными кольцами, либо асинхронный двигатель с короткозамкнутым ротором. мотор. Обе машины будут механически соединены; первый двигатель представляет собой асинхронный двигатель с контактными кольцами, который питает второй двигатель через контактные кольца. Скорость асинхронного двигателя с контактными кольцами N S1 = 120 F/P 1 Скорость второго двигателя составляет N S2 = 120S 1 F/P 2 . При дифференциальном каскадировании число полюсов обоих двигателей не должно быть одинаковым. Со стороны статора мы можем контролировать скорость, используя метод управления напряжением, метод управления сопротивлением, метод управления частотой и метод переключения полюсов. Со стороны ротора мы можем управлять скоростью, используя метод сопротивления ротора, метод рекуперации мощности скольжения и каскадное соединение. В асинхронном двигателе с короткозамкнутым ротором невозможно получить доступ к ротору, поэтому возможно только управление скоростью на основе статора, т. е. метод управления напряжением, метод управления сопротивлением, метод управления частотой и метод переключения полюсов. Этот метод управления скоростью возможен двумя способами. Первый заключается в использовании нескольких наборов обмоток статора, в которых статор рассчитан на несколько наборов полюсов, поэтому мы можем соединить обмотку с набором полюсов, который соответствует нашим требованиям. Второй — последовательное изменение полюсов путем реверсирования катушек, поэтому мы можем получить еще одну другую скорость. В этом методе внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf). В отличие от ротора с короткозамкнутым ротором ротор с контактными кольцами не может адаптироваться к смене полюсов в обмотке статора, так как при проектировании асинхронного двигателя с контактными кольцами полюса ротора проектируются такими же, как и у статора. 100307 Следите за нашими новостями Наши приложения GradeStack Learning Pvt. Sector 125, Noida, Uttar Pradesh 201303 Разработка и развертывание асинхронного двигателя алгоритмы управления с использованием Simulink Управление скоростью асинхронного двигателя — это процесс управления токами в асинхронном двигателе для регулирования скорости. Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора. Скольжение и результирующий крутящий момент для асинхронного двигателя Условные обозначения: Для асинхронного двигателя с короткозамкнутым ротором регулирование скорости с помощью управления с ориентацией поля (FOC) регулирует I d и I q таким образом, что поток пропорционален I d , а крутящий момент пропорционален I д . Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для разработки, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования. Эта диаграмма Simulink иллюстрирует типичный алгоритм FOC для управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором. Алгоритм FOC для управления скоростью асинхронного двигателя. Основные компоненты стратегий управления асинхронными двигателями Включают: Simscape Electrical™ и Motor Control Blockset™ предоставляют асинхронный двигатель и примеры управления, ориентированного на поле, для разработки имитационной модели для управления скоростью асинхронного двигателя. Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к условиям неисправности, которые нецелесообразно тестировать на оборудовании. Используя Simscape Electrical and Motor Control Blockset, инженеры по управлению двигателем разрабатывают управление скоростью асинхронного двигателя: 5:34
Продолжительность видео 5:34. Поле-ориентированное управление асинхронными двигателями с помощью Simulink и блока управления двигателем 3 видео Поле-ориентированное управление асинхронными двигателями с помощью Simulink (3 видео) Как много вы знаете о конструкции управления силовой электроникой? Начать тест Если напряжение уменьшается для данной нагрузки, скольжение будет увеличиваться при снижении скорости, чтобы поддерживать постоянный крутящий момент нагрузки. Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения. Этот тип управления скоростью асинхронного двигателя используется редко, так как приводит к перегреву асинхронного двигателя, поскольку незначительное изменение скорости требует значительного снижения напряжения.
Если напряжение уменьшается для данной нагрузки, скольжение будет увеличиваться при снижении скорости, чтобы поддерживать постоянный крутящий момент нагрузки. Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения. Этот тип управления скоростью асинхронного двигателя используется редко, так как приводит к перегреву асинхронного двигателя, поскольку незначительное изменение скорости требует значительного снижения напряжения. Этот метод требует преобразователей переменного напряжения и переменной частоты, что делает этот метод дорогостоящим. Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя.
Этот метод требует преобразователей переменного напряжения и переменной частоты, что делает этот метод дорогостоящим. Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя. Мы знаем, что
Мы знаем, что Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
Метод рекуперации мощности скольжения 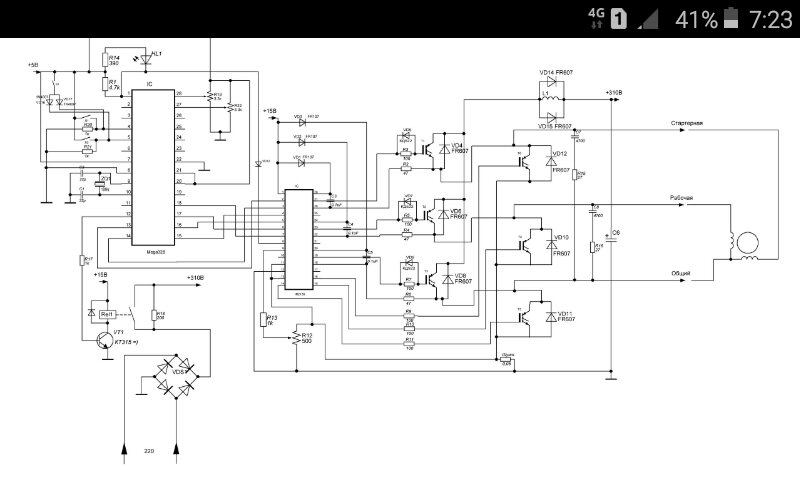
 возможный. Они
возможный. Они Часто задаваемые вопросы по управлению скоростью асинхронного двигателя
Какие существуют методы управления скоростью асинхронного двигателя?
Какими методами можно регулировать скорость асинхронного двигателя с короткозамкнутым ротором?
Что такое метод переключения полюсов для управления скоростью в асинхронном двигателе?
Каков метод рекуперации мощности скольжения для регулирования скорости асинхронного двигателя?
 Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.
Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций. Почему метод управления скоростью с переключением полюсов невозможен для асинхронного двигателя с контактными кольцами?
 Ltd.Windsor IT Park, Tower — A, 2nd Floor,
Ltd.Windsor IT Park, Tower — A, 2nd Floor, Управление скоростью асинхронного двигателя — MATLAB & Simulink
Желтая стрелка – результирующий крутящий момент
Пурпурная стрелка – вращающееся магнитное поле статора
Синяя стрелка – частота вращения ротора Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе.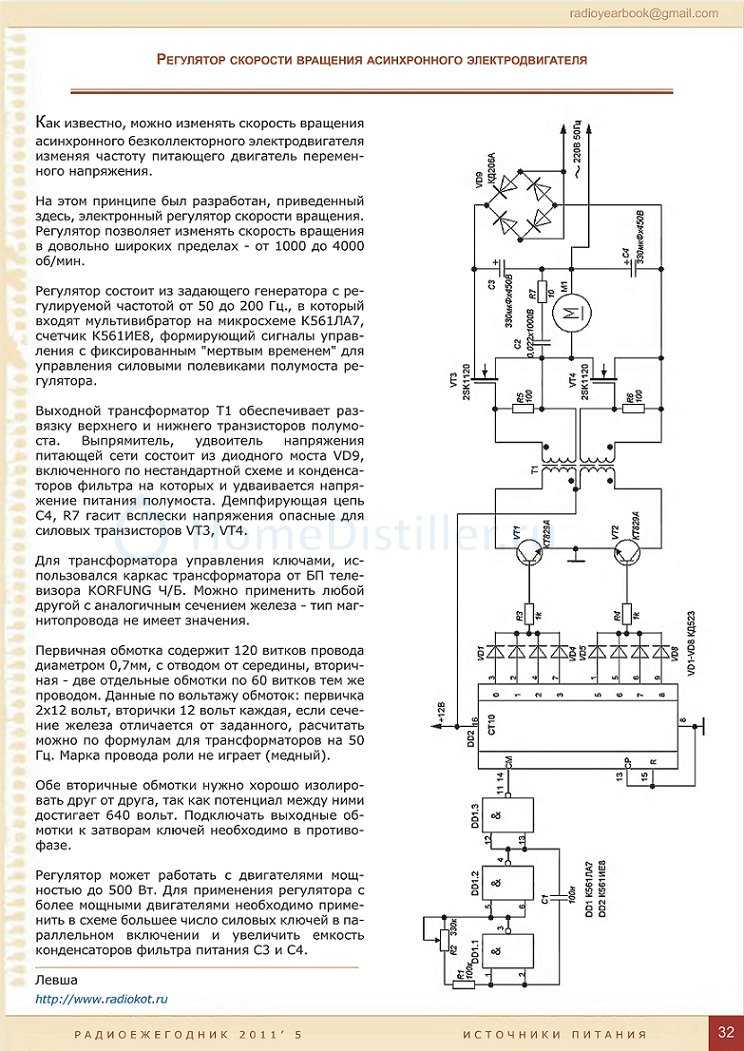 Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.
Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.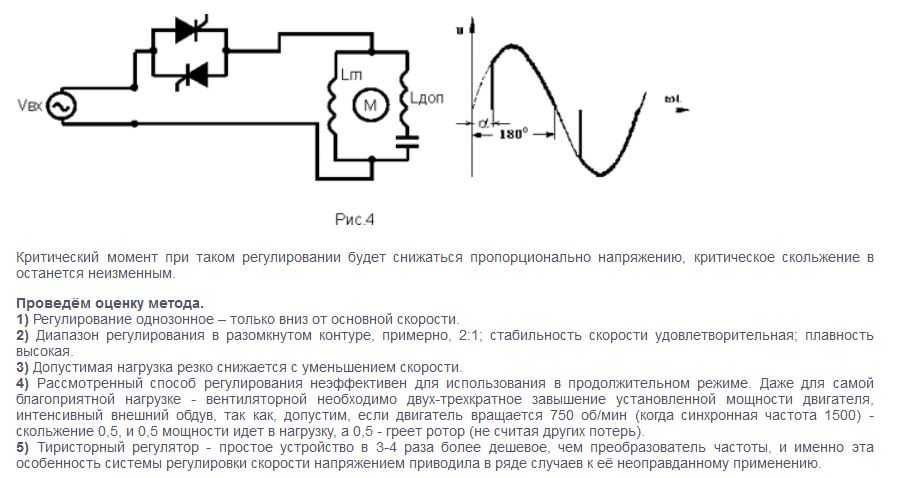
 Для бездатчикового управления асинхронным двигателем алгоритм на основе наблюдателя заменяет физический датчик и оценивает скорость двигателя в режиме реального времени.
Для бездатчикового управления асинхронным двигателем алгоритм на основе наблюдателя заменяет физический датчик и оценивает скорость двигателя в режиме реального времени.
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и набора блоков управления двигателем.
Примеры и инструкции
- Ориентированное на поле управление асинхронными двигателями с помощью Simulink и блока управления двигателем (5:34) — Видео
- Прямое управление крутящим моментом асинхронной машины с модулятором пространственного вектора — Пример
- Бездатчиковое полеориентированное управление асинхронным двигателем — Пример
- Поле-ориентированное управление асинхронным двигателем с использованием датчика скорости — Пример
- Управление без обратной связи и калибровка двигателя переменного тока — Пример
- Полеориентированное управление индукционной машиной — Пример
Справочник по программному обеспечению
- Индукционный двигатель — Документация
- Опорные сигналы управления асинхронным двигателем, ориентированные на поле — Документация
- Оценщик скорости скольжения для асинхронного двигателя — Документация
- Поле-ориентированное управление приводом асинхронного двигателя — Документация
Перейдите от простых задач к более сложным маневрам, пройдясь по интерактивным примерам и учебным пособиям.