
Регулятор скорости вращения асинхронного электродвигателя
Пользователь интересуется товаром BM — Устройство для сбора и передачи данных по Wi-Fi. Пользователь интересуется товаром MP — Силовое реле расширения 5В, для управления электроприборами В мощностью до 2 кВт 10А. Пользователь интересуется товаром NN — Лабораторный блок питания 1,2…37В 0…3А набор для пайки. Приглашаем Вас в фирменные магазины в Москве Подробнее.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Асинхронная машина
- регулировка скорости электродвигатель
- Регулятор оборотов асинхронного электродвигателя 220в своими руками
Регулятор частоты вращения двигателя - Способы регулирования скоростью вращения асинхронного двигателя
- Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
- Способы регулировки оборотов вращения асинхронных двигателей
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов для асинхронного электродвигателя 220-380 вольт
Асинхронная машина
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность. Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
Также не затронем способ изменения количества полюсов обмоток. Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:.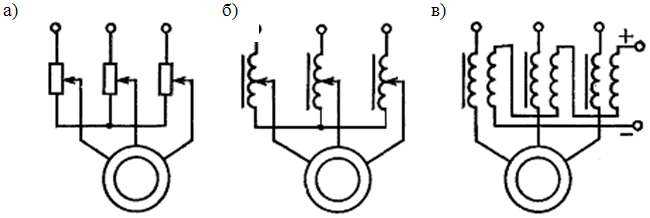 При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. Данный способ имеет небольшой диапазон регулирования, примерно , а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. Данный способ имеет небольшой диапазон регулирования, примерно , а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности. Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой. Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1 , переключатель SW1 , на который приходят отводы с разным напряжением, и двигатель М1.
Преимущества данной схемы:. В данной схеме используются ключи — два тиристора, включённых встречно-параллельно напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения. Таким образом изменяется среднеквадратичное значение напряжения. Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов так называемые диммеры.
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе. Достоинства тиристорных регуляторов:. Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом. Изменение напряжения осуществляется по принципу ШИМ широтно-импульсная модуляция , а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором IGBT.
Выходные транзисторы коммутируются с высокой частотой около 50 кГц , если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке.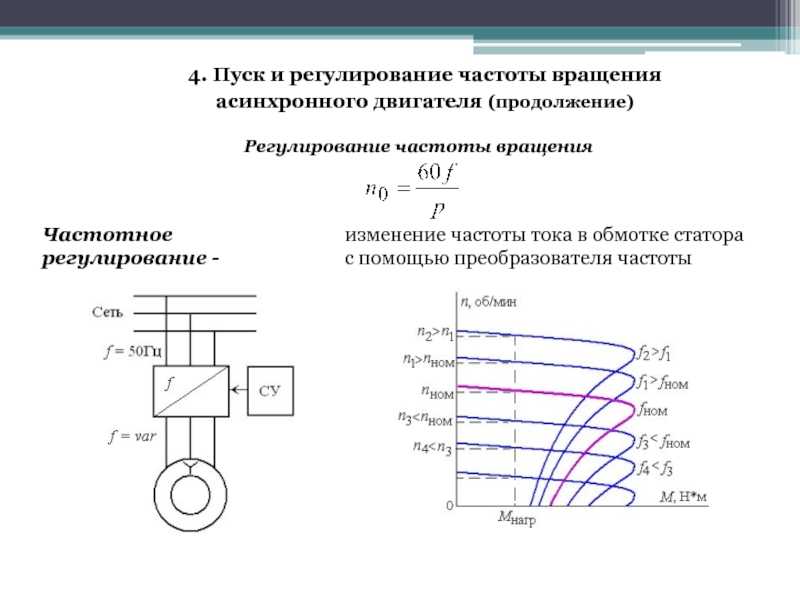
Плюсы электронного автотрансформатора:. Слабые стороны:. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей. Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули.
Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты. На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:.
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно. Преимущества специализированного частотного преобразователя:. Минусы использования однофазного ПЧ:. Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление. Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна. Недостатки метода:. Чем заменить сгоревший трансформатор или штатный импульсный источник? Предлагаемый модуль питания обеспечит стабильное напряжение питания.
Линейка холодильщика — удобный инструмент, заменяющий бумажные графики зависимости температуры от давления фреонов. Что же ещё удобней? Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. Главная Справочные материалы Управление скоростью вращения однофазных двигателей. Управление скоростью вращения однофазных двигателей.
Что же ещё удобней? Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. Главная Справочные материалы Управление скоростью вращения однофазных двигателей. Управление скоростью вращения однофазных двигателей.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения В. Регулировать скорость вращения таких двигателей необходимо, например, для: изменения расхода воздуха в системе вентиляции регулирования производительности насосов изменения скорости движущихся деталей, например в станках, конвеерах В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
На практике для этого применяют различные схемы регуляторов. Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования. Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Самостоятельный ремонт кондиционеров. Чем заменить сгоревший трансформатор? Линейка холодильщика — современный вариант.
Как подобрать аналог варистора. Для подбора замены сгоревшему варистору необходимо воспользоваться таблицей аналогов. Климатические новости. Demir Dokum. General Climate.
Техническая документация Самостоятельный ремонт кондиционеров Самостоятельный монтаж кондиционеров Познавательные статьи Инверторные кондиционеры Техническая библиотека Справочные материалы Кондиционирование серверной Климатические новости История брендов Общестроительные статьи Магазин.
Контактная информация. Как подобрать аналог варистора Для подбора замены сгоревшему варистору необходимо воспользоваться таблицей аналогов.
регулировка скорости электродвигатель
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире. Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение. Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора.
При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире. Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение. Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора.
Итак, способ регулирования частоты вращения асинхронного двигателя что изменить скорость вращения электродвигателя можно лишь путем.
Регулятор оборотов асинхронного электродвигателя 220в своими руками
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем редукторы, шкивы , что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя. Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме. Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:.
Регулятор частоты вращения двигателя
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная. Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя.
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках.
Способы регулирования скоростью вращения асинхронного двигателя
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения. Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения инвертор. Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Забыли пароль? Изменен п. Расшифровка и пояснения — тут. Автор: viter50 , 1 ноября в Электроника. Может слышали о таком как «Транзисторы составные биполярные» именно к этому классу он относится, а значит и схема нарисована правильно, а с чтением схем у вас явное осложнение, не просто так там включёны диоды, там применён десятичный счетчик, 5 и 10 импульс не используется, это необходимо для исключения «сквозного тока». Рискну высказать свое субъективное мнение.
Различные виды регуляторов для изменения скорости вращения асинхронного двигателя. Частотный регулятор оборотов вращения.
Способы регулировки оборотов вращения асинхронных двигателей
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части. Асинхронный двигатель — самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин — постоянная скорость вращения вала.
Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части. Асинхронный двигатель — самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин — постоянная скорость вращения вала.
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.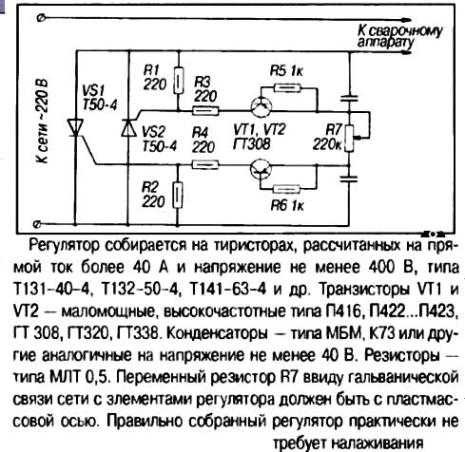
На современном этапе развития промышленности возникла необходимость для создания управления темпом вращения различными методами и устройствами.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов. Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора. Из рис. Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до 2 — 3 : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению.
Появится избыточный результирующий вращающий момент, разгоняющий ротор до скорости. Регулятор скорости вращения асинхронного электродвигателя.. Регулирование частоты вращения двигателей определяется в.. Такие схемы применяются, например, у асинхронных двигателей.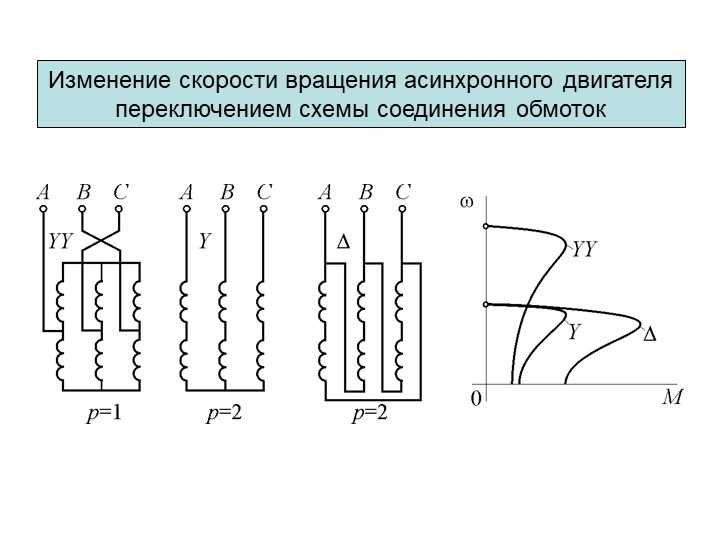
Регулирование скорости асинхронного электродвигателя путем изменения частоты питающей сети
Наиболее экономичным способом регулирования скорости вращения асинхронных электрических машин с короткозамкнутым ротором является изменение частоты питающего напряжения последних. При изменении частоты также будут меняться и параметры асинхронной машины. Для обеспечения необходимых значений пускового и критического моментов, а также коэффициента мощности и коэффициента полезного действия КПД, необходимо с изменением частоты соответствующим образом изменять и напряжение, подводимое к зажимам электродвигателя.
Общие закономерности регулирования скорости асинхронных машин путем изменения частоты питающей сети были исследованы академиком М.П. Костенко еще в 1925 году.
Основное соотношение, связывающее изменение частоты и напряжения, в зависимости от характера статического момента механизма может быть выведено из общих соотношений, представляемых эквивалентной схемой замещения.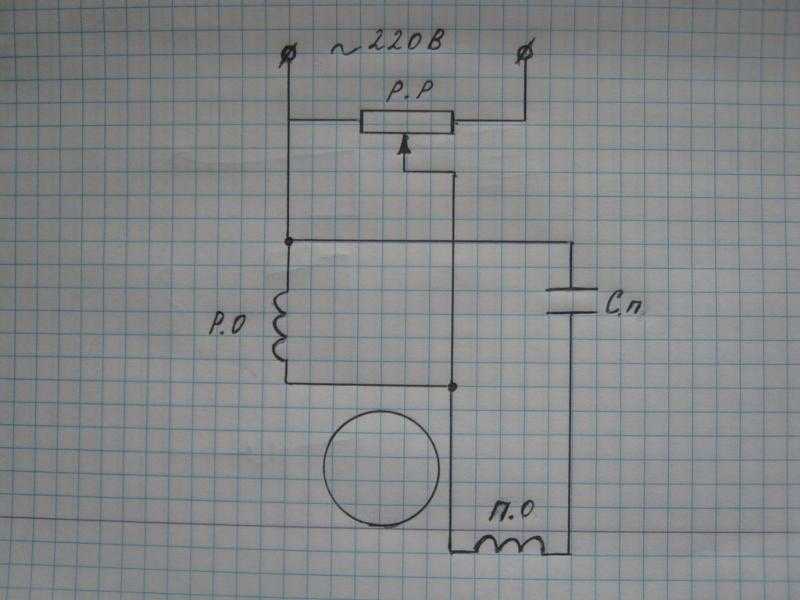 При постоянной частоте питающей сети критический момент асинхронного электродвигателя будет равен:
При постоянной частоте питающей сети критический момент асинхронного электродвигателя будет равен:
Где: m1 – количество фаз в обмотке статора; r1 и x1 – активное и индуктивное сопротивление статорной обмотки; х2/ — индуктивное сопротивление роторной обмотки, приведенной к первичной обмотке; f – частота питающей сети.
Если пренебречь активным сопротивлением статорной обмотки, выражение (1) примет вид:
Индуктивные сопротивления x1 и х2/ зависят от частоты питающей сети. Поэтому при переменной частоте предыдущее выражение должно быть записано как:
Для сохранения неизменной перегрузочной способности машины отношение критических моментов при любых скоростях должно быть равно отношению соответствующих статических моментов:
Где Мс1 и Мс2 – статические моменты, соответствующие скорости электрической машины при частотах f1 и f2; U1 и U2 – напряжения, подводимые к двигателю при тех же частотах.
Полученная формула (4) показывает, что оптимальный закон изменения напряжения при частотном регулировании определяется характером изменения статического момента в зависимости от частоты. В таблице ниже сопоставлены значения моментов, мощностей и напряжений при различных характерах зависимости статического момента от скорости.
Анализ, проведенный академиком М.П. Костенко на базе упрощенной круговой диаграммы, показал, что при соблюдении условия (4) будет иметь место постоянство cosφ, а КПД электрической машины будет функцией частоты и не зависит от нагрузки. Для всех видов зависимости момента от скорости: Мс ≡ 1/f, Мс = const, Mc ≡ f и Mc ≡ f2. КПД двигателя при каждой заданной скорости будет примерно одинаков.
Для выявления поведения асинхронного электродвигателя при регулировании частоты питающего напряжения в случаях различной зависимости статического момента от скорости необходимо установить характер изменения пускового и критического моментов.
В основу рассмотрения легла эквивалентная схема асинхронной машины с намагничивающим контуром, вынесенным на зажимы машины. Влияние насыщения не учитывается. За исходные данные принимаем параметры машины при номинальном напряжении и частоте fном = 50 Гц. В качестве независимой переменной (определяющего параметра) удобно принять частоту, выраженную в относительных единицах:
Напряжение, приложенное к зажимам электрической машины, будет функцией частоты и одновременно, будет зависеть от характера изменения статического момента, и в общем случае будет иметь вид:
Показатель степени α зависит от желаемого характера Мдв и функции скорости. При построении механической характеристики асинхронной машины при любой f можно использовать общее выражение:
Индуктивное сопротивление обмоток можно выразить при f = 50 Гц, а именно:
Где х1н и х2н/ — индуктивные сопротивления статора и ротора, приведенные к обмотке статора, при f = 50 Гц.
После введения относительных единиц выражение примет вид:
Где φ – частота в относительных единицах; α – коэффициент, определяемый характером зависимости момента от скорости электрической машины.
В (8) при переходе к относительным единицам U2 превращается в U2нφ2α, однако за счет f, входящей в выражение синхронной скорости ω0 = 2πfнφ, показатель степени у
φ становится 2α — 1.
Величина критического момента станет равна:
В случае пренебрежения активным сопротивлением статорной обмотки:
Выражение (10) может быть представлено как:
Где Мкн – критический момент электрической машины при номинальном напряжении и f.
Критическое скольжение при переменной частоте:
В ряде случаев удобно воспользоваться выражением механической характеристики, содержащим значение критического момента:
Если пренебречь сопротивлением активным обмотки статора уравнение механической характеристики примет вид:
Подставляя в упрощенное выражение механической характеристики значения Мк и sк без учета r1 получим расчетную формулу:
На рисунке ниже приведены механические характеристики асинхронного электродвигателя для трех различных частот в относительных единицах для случая изменения f по закону (U/f) = const или α = 1.
Сравнение характеристик показывает, что критическое скольжение возрастает с понижением частоты. Это связано с изменением соотношения активного и индуктивного сопротивления. При уменьшении f критический момент в двигательном режиме уменьшается. Выражение для пускового момента равно:
Пусковой момент при небольших изменениях частоты несколько увеличивается, а затем, при дальнейшем уменьшении f, достигает максимума, а дальше падает. Понижение М, наблюдаемое при низких f, вызывается относительным увеличением активного сопротивления, а также уменьшением магнитного потока, влияние которого не учитывают приведенные выше формулы. Уменьшение потока обуславливается падением напряжения в обмотке статора и является функцией нагрузки электродвигателя. Уменьшение магнитного потока может быть устранено с помощью увеличения отношения U/f при малых значениях частоты. Увеличение отношения U/f в размере, необходимом для поддержания номинального значения магнитного потока при нагрузке, приведет к тому, что при малых нагрузках машина окажется перевозбужденной и, следовательно, возрастет намагничивающий ток.
Механическая характеристика асинхронного двигателя для случая α = 1/2 , то есть при изменении напряжения по закону показаны ниже:
Регулирование скорости асинхронных короткозамкнутых машин в настоящее время применяется для самого широкого спектра рабочих механизмов. В высоко оборотистых электроприводах, где скорость вращения вала равна или превышает 3000 об/мин, применение коллекторных электромашин крайне нежелательно. Здесь больше подходит частотно-регулируемый асинхронный электропривод. Часто данный способ регулирования применяется при необходимости одновременного изменения скорости по одному закону нескольких рабочих органов машины, приводимых в движение отдельными электродвигателями. Примерами таких установок могут послужить электроприводы центрифуг вискозной промышленности, применяемые для получения вискозного волокна, рогулечных прядильных машин текстильной промышленности, роликовых транспортеров прокатных цехов металлургических заводов, служащих для транспортировки как горячего, так и холодного металла в процессе прокатки.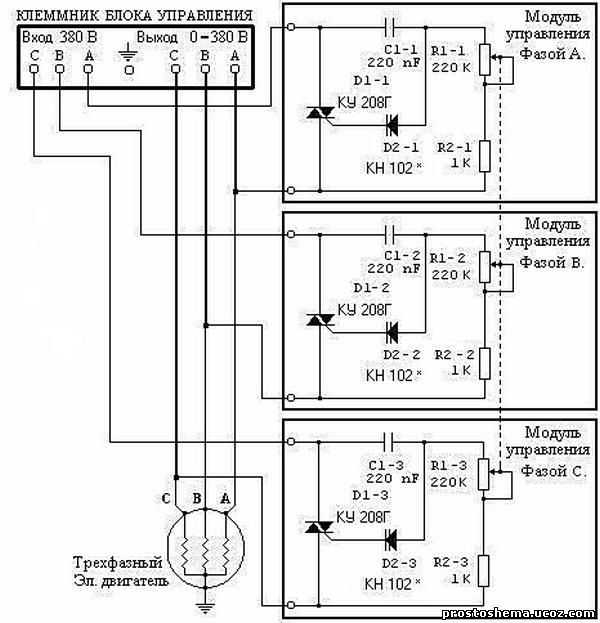 Во всех перечисленных случаях каждый отдельный элемент рабочей машины (отдельная центрифуга, рогулька прядильной машины, ролик транспортера и так далее) приводятся в движение отдельным асинхронным двигателем мощностью от нескольких десятков ватт, до киловатт, и целая группа подобных двигателей может питаться от одного преобразователя с регулируемой частотой.
Во всех перечисленных случаях каждый отдельный элемент рабочей машины (отдельная центрифуга, рогулька прядильной машины, ролик транспортера и так далее) приводятся в движение отдельным асинхронным двигателем мощностью от нескольких десятков ватт, до киловатт, и целая группа подобных двигателей может питаться от одного преобразователя с регулируемой частотой.
В качестве источника регулируемых асинхронных электродвигателей могут быть использованы следующие типы преобразователей частоты:
- Синхронный генератор, вращающийся с переменной частотой.
- Асинхронный преобразователь частоты.
- Преобразователь типа Леблана.
- Коллекторные генераторы переменного тока с возбуждением со статора.
- Полупроводниковые преобразователи частоты.
В таблице ниже представлены сопоставления технических показателей каждого типа перечисленных преобразователей:
Таблица выше показывает, что все системы машинных преобразователей, за исключением преобразователя Леблана, состоят из значительного количества электрических машин и обладают невысоким общим коэффициентом полезного действия и высокой первоначальной стоимостью. Преобразователь частоты Леблана свободен от указанных недостатков, однако, несовершенство коммутации ограничило возможности его широкого использования в недалеком прошлом. Современная электроника вывела на первое место полупроводниковые преобразователи частоты равных которым пока нет, и которые используются практически во всех частотно-регулируемых электроприводах.
Преобразователь частоты Леблана свободен от указанных недостатков, однако, несовершенство коммутации ограничило возможности его широкого использования в недалеком прошлом. Современная электроника вывела на первое место полупроводниковые преобразователи частоты равных которым пока нет, и которые используются практически во всех частотно-регулируемых электроприводах.
Простое управление скоростью асинхронного двигателя переменного тока аналоговым и цифровым способами с использованием SOLO | FOC
Асинхронные двигатели переменного тока (ACIM) являются одним из наиболее часто используемых типов электродвигателей, особенно в промышленности, они играют очень большую роль в том, как в настоящее время в отрасли моторизованы заводы и средства автоматизации. В этих типах двигателей есть две основные части, способствующие движению:
1. Статор, который является неподвижной частью двигателя и отвечает за создание магнитного поля
2. Ротор, который представляет собой вращающуюся часть, не имеющую физического контакта со статором
В общем, теория работы ACIM заключается в том, что магнитное поле статора индуцирует ток в роторе, что приводит к крутящему моменту генерация и механическое вращение ротора. Другими словами, как только вращающееся магнитное поле приложено к статору, обычно с использованием 3-фазного напряжения на статоре со сдвигом фаз на 120 градусов по отношению друг к другу, со скоростью, известной как «синхронная скорость», ротор будет попытайтесь следовать этому вращающемуся полю со скоростью, которая называется «фактическая скорость вращения» или реальная механическая скорость, а фактическая скорость немного меньше синхронной скорости. Разница между синхронной скоростью и фактической скоростью известна как «скольжение», что является основной причиной того, что мы называем эти двигатели асинхронными двигателями.
Другими словами, как только вращающееся магнитное поле приложено к статору, обычно с использованием 3-фазного напряжения на статоре со сдвигом фаз на 120 градусов по отношению друг к другу, со скоростью, известной как «синхронная скорость», ротор будет попытайтесь следовать этому вращающемуся полю со скоростью, которая называется «фактическая скорость вращения» или реальная механическая скорость, а фактическая скорость немного меньше синхронной скорости. Разница между синхронной скоростью и фактической скоростью известна как «скольжение», что является основной причиной того, что мы называем эти двигатели асинхронными двигателями.
Таким образом, несмотря на другие типы трехфазных двигателей с магнитами, такие как бесщеточные синхронные двигатели постоянного тока или синхронные двигатели с постоянными магнитами, в статоре ACIM не используется физический магнит, поэтому интенсивность поля статора регулируется путем управления величиной подаваемого тока. в статор (известный как ток намагничивания), и это явление дает дополнительную степень свободы в управлении асинхронными двигателями переменного тока по отношению к составным частям с постоянными магнитами, в которых напряженность поля (поток) постоянна и зависит от силы используются магниты.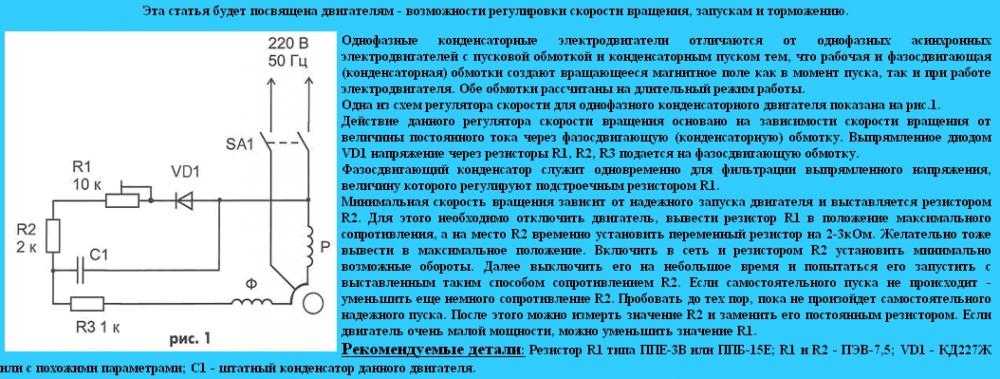
Существует два основных типа асинхронных двигателей переменного тока в зависимости от формы их ротора:
1. Ротор с короткозамкнутым ротором
2. Асинхронные двигатели переменного тока с фазным ротором
Однако первая категория двигателей переменного тока более популярна. среди отрасли, поскольку они более рентабельны и надежны.
Асинхронные двигатели переменного тока обычно управляются устройствами, называемыми «преобразователями частоты», известными как ЧРП, в которых они прикладывают вращающееся поле к статору контролируемым образом, чтобы ротор мог следовать за ним и достигать желаемой механической скорости.
Существует множество способов, с помощью которых контроллеры асинхронных двигателей переменного тока могут зафиксировать скорость вращения ротора на желаемой скорости, но наиболее продвинутые и надежные из них обычно используются в моделях с полевым или векторным управлением. В версиях с полевым управлением (FOC) крутящий момент и поле статора (поток) контролируются отдельно, и это дает огромное преимущество по сравнению с обычными частотно-регулируемыми приводами, поскольку они обеспечивают гораздо более надежное и надежное управление, особенно в приложениях, на которые воздействует механическая нагрузка.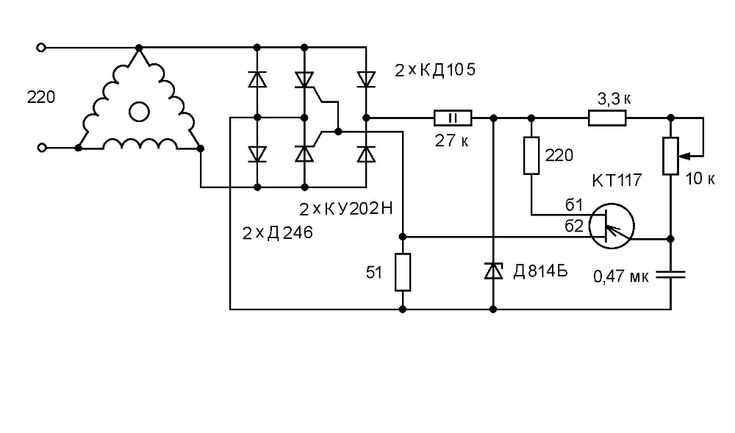 вал двигателя может время от времени меняться.
вал двигателя может время от времени меняться.
SOLO использует FOC для управления асинхронными двигателями переменного тока с помощью методики, показанной ниже на диаграмме. Проще говоря, SOLO пытается контролировать скорость двигателя ACIM, используя два разных параметра управления:
1. Управление скоростью с регулированием крутящего момента с использованием квадратурного тока (Iq)
2. Регулирование тока намагничивания для управления напряженностью поля статора ( потока) с использованием постоянного тока (Id)
Оба упомянутых выше параметра управления доступны пользователю, и пользователь может определить желаемое значение для каждого из них, как показано на следующей схеме подключения в ее простейшей форме с помощью при использовании ручного (аналогового) автономного режима управления:
Проводка SOLO UNO
Проводка SOLO MINI
Проводка SOLO BETA
Обратите внимание, что указанная проводка является только одним из возможных способов запуска системы с SOLO, существует множество других типов проводки, включая отправку управляющих ссылок, используя импульсы PWM или даже отправку всех команд, используя только цифровую связь с протоколами USB или UART.
Чтобы узнать больше, вы можете посмотреть следующее видео, демонстрирующее управление скоростью асинхронного двигателя переменного тока как в полностью аналоговом режиме с использованием пары потенциометров, так и позднее в цифровом режиме с использованием терминала SOLO Motion и одного USB-кабеля!
Управление скоростью асинхронного двигателя — MATLAB и Simulink
Управление скоростью асинхронного двигателя
Разработка и развертывание алгоритмов управления скоростью асинхронного двигателя с использованием Simulink
Управление скоростью асинхронного двигателя — это процесс управления токами в асинхронном двигателе для регулирования скорости. Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора.
К сожалению, ваш браузер не поддерживает встроенные видео.
Скольжение и результирующий крутящий момент для асинхронного двигателя
Условные обозначения:
Желтая стрелка – результирующий крутящий момент
Пурпурная стрелка – вращающееся магнитное поле статора связь магнитных полей в статоре и роторе. Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе. Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.
Для асинхронного двигателя с короткозамкнутым ротором регулирование скорости с помощью управления с ориентацией поля (FOC) регулирует I d и I q таким образом, что поток пропорционален I d , а крутящий момент пропорционален I д .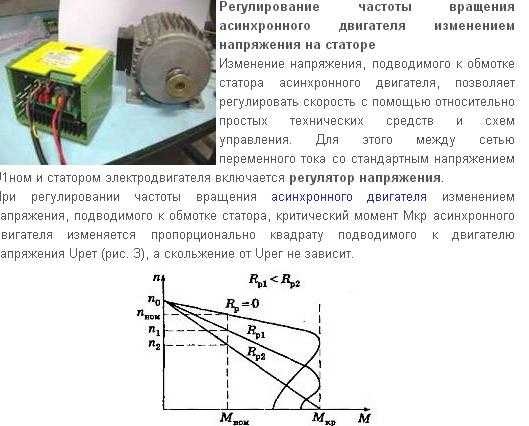 Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для разработки, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования.
Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для разработки, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования.
Эта диаграмма Simulink иллюстрирует типичный алгоритм FOC для управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором.
Алгоритм FOC для управления скоростью асинхронного двигателя.
Основные компоненты стратегий управления асинхронными двигателями Включают:
- Внутренний контур (пропорционально-интегральный или PI)
- Управление током по оси Q: регулирует ток по оси q для управления электрическим крутящим моментом, приложенным к двигателю
- Управление током по оси D: для управления ослаблением поля регулирует ток, чтобы уменьшить поток по оси d и позволить двигателю вращаться со скоростью выше базовой за счет крутящего момента
- Внешний контур (PI) : Контур управления скоростью асинхронного двигателя.
 Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура .
Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура . - Преобразования Clarke, Park и Inverse Park : преобразование между стационарными и вращающимися синхронными кадрами
- Оценка скорости скольжения : Поскольку асинхронные двигатели являются асинхронными, скольжение между частотой статора и ротора оценивается для расчета синхронной скорости и положения ротора
- Пространственно-векторная модуляция (SVM) : Генерирует модулированные импульсы для управления переключателями силовой электроники в инверторе
- Датчик скорости : Скорость асинхронного двигателя можно измерить с помощью квадратурного энкодера или другого датчика. Для бездатчикового управления асинхронным двигателем алгоритм на основе наблюдателя заменяет физический датчик и оценивает скорость двигателя в режиме реального времени.

Simscape Electrical™ и Motor Control Blockset™ предоставляют асинхронный двигатель и примеры управления, ориентированного на поле, для разработки имитационной модели для управления скоростью асинхронного двигателя. Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к условиям неисправности, которые нецелесообразно тестировать на оборудовании.
Используя Simscape Electrical and Motor Control Blockset, инженеры по управлению двигателем разрабатывают управление скоростью асинхронного двигателя:
- Моделирование асинхронных двигателей, инверторов и регуляторов скорости и тока
- Автонастройка усиления контура управления скоростью асинхронного двигателя с использованием методов проектирования управления
- Разработка алгоритмов наблюдения для оценки положения и скорости ротора.
- Моделирование режимов запуска, выключения и ошибок, а также разработка логики снижения номинальных характеристик и защиты для обеспечения безопасной работы
- Запуск моделирования двигателя и контроллера с обратной связью для проверки производительности системы в нормальных и нештатных режимах работы
- Генерация ANSI, ISO или оптимизированного для процессора кода C и HDL из модели для быстрого прототипирования, аппаратного тестирования в цикле и внедрения в производство

5:34 Продолжительность видео 5:34.
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и блока управления двигателем
Поле-ориентированное управление асинхронными двигателями с помощью Simulink.3 видео
Полеориентированное управление асинхронными двигателями с помощью Simulink (3 видео)
Как много вы знаете о конструкции управления силовой электроникой?
Начать тест
Примеры и инструкции
- Ориентированное на поле управление асинхронными двигателями с помощью Simulink и блока управления двигателем (5:34) — Видео
- Прямое управление крутящим моментом асинхронной машины с модулятором пространственного вектора — Пример
- Бездатчиковое полеориентированное управление асинхронным двигателем — Пример
- Поле-ориентированное управление асинхронным двигателем с использованием датчика скорости — Пример
- Управление без обратной связи и калибровка двигателя переменного тока — Пример
- Полеориентированное управление индукционной машиной — Пример
Справочник по программному обеспечению
- Индукционный двигатель — Документация
- Опорные сигналы управления асинхронным двигателем, ориентированные на поле — Документация
- Оценщик скорости скольжения для асинхронного двигателя — Документация
- Поле-ориентированное управление приводом асинхронного двигателя — Документация
Учебники и примеры глубокого обучения — MATLAB и Simulink.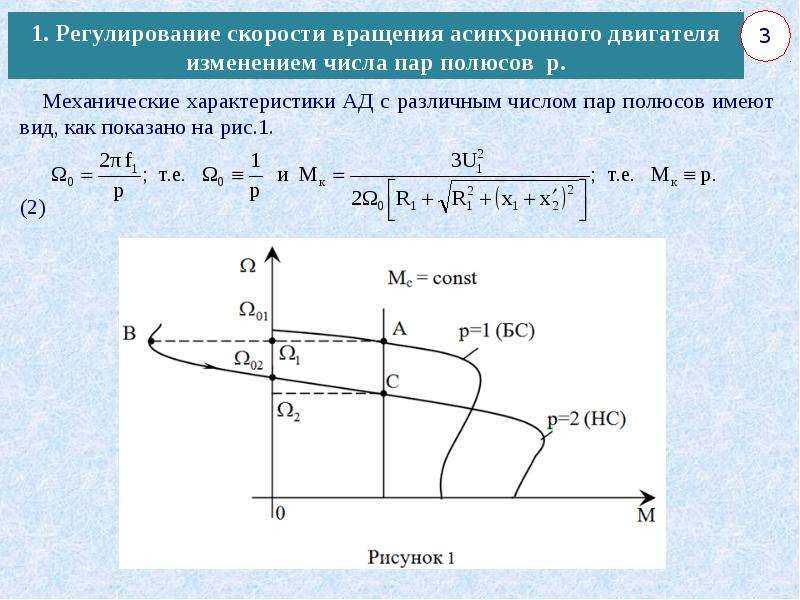
Перейдите от простых задач к более сложным маневрам, пройдясь по интерактивным примерам и учебным пособиям.
Изучите примеры управления двигателем
Ознакомьтесь с примерами преобразования энергии
Ознакомьтесь с примерами питания от батарей
Ознакомьтесь с сообществом по управлению силовой электроникой
Сообщество MathWorks для студентов, исследователей и инженеров, использующих Simulink для применения управления силовой электроникой к электромобилям, возобновляемым источникам энергии, аккумуляторным системам, преобразованию энергии и управлению двигателем.
Начать обсуждение
Смотреть видео
Испытания.
Получите бесплатную пробную версию
30 дней исследования в ваших руках.
Загрузить сейчас
Понимание алгоритмов управления двигателем BLDC
Читать электронную книгу
Выберите сеть Сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и посмотреть местные события и
предложения.