
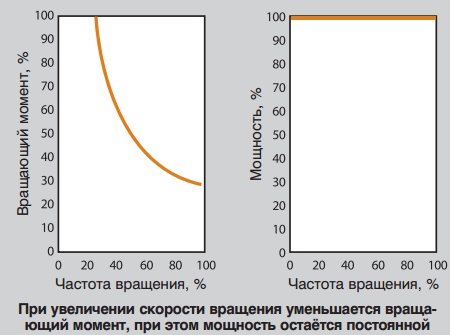
17 часто задаваемых вопросов о преобразователе частоты и электродвигателе — Статьи
Дата публикации: 21.08.2019
В данной статье мы подобрали для вас ответы на наиболее часто задаваемые вопросы по работе электродвигателей и частотных преобразователей.
1. Что такое электромеханический привод?
Ответ: Электромеханический привод – это система, состоящая из электродвигателя, механического передаточного устройства, электрического силового преобразователя и электронного устройства управления, осуществляющая управляемое преобразование электрической энергии в энергию движения механического объекта.
2. Что такое преобразователь частоты?
Ответ: Преобразователь частоты – это устройство для управляемого питания электродвигателя.
3. В чем заключается назначение преобразователя частоты?
Ответ: Назначение преобразователя частоты – это управление моментом/скоростью вращения электродвигателя за счет изменения частоты и напряжения питания.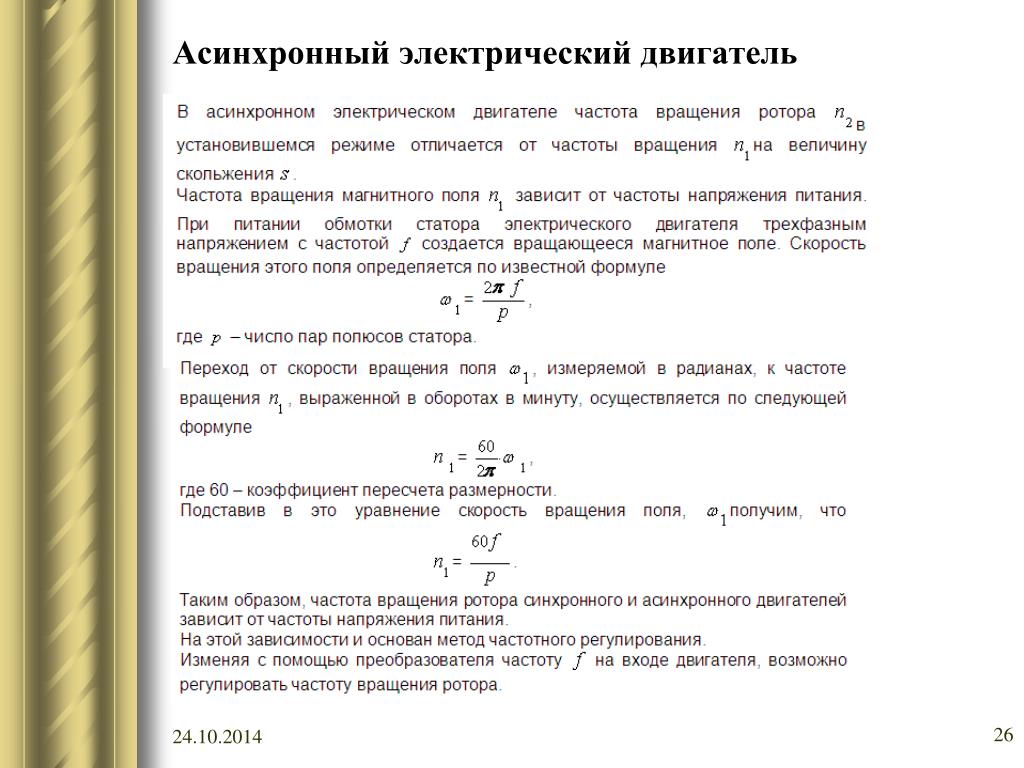
4. Что такое ШИМ?
Ответ: ШИМ (Широтно импульсная модуляция) – это метод получения регулируемого выходного напряжения путем изменения длительности коммутации.
5. Как согласуется выходное напряжение ПЧ с входным?
Ответ: Выходное напряжение может меняться от 0 до уровня входного напряжения ПЧ (возможна перегрузка в несколько процентов). Соответственно при питании ПЧ от сети 220В не возможно развить номинальный момент на двигателе подключенным по схеме питания 380В.
6. Как согласуется выходная частота ПЧ с номинальной входной?
Ответ: Выходная частота формируется посредством ШИМ и может меняться в диапазоне от 0 до 400 -590 Гц (в зависимости от модели ПЧ). В зависимости от выходной частоты ПЧ меняется скорость вращения вала двигателя.
7. Возможно ли управлять ПЧ однофазными двигателями?
Ответ: Нет.
8. Возможно ли управлять ПЧ с однофазным питанием, трехфазными двигателями?
Ответ: Да, до 2,2 кВт.
9. Основные плюсы использования преобразователей частоты?
Ответ: Их 2. Во-первых, экономия электроэнергии при работе электродвигателя. Во-вторых, реализация сложных технологических процессов за счет изменения частоты вращения приводов.
10. Какой принцип работы асинхронного двигателя с короткозамкнутым ротором?
Ответ: ПЧ создает вращающееся магнитное поле в статоре, а оно создает электрическое поле в короткозамкнутом роторе (принцип магнитной индукции). Происходит взаимодействие между полями ротора и статора. Поле ротора стремится вращаться также как поле статора, тем самым ротор приходит во вращение.
11. От чего зависит номинальная скорость вращения ротора асинхронного двигателя с короткозамкнутым ротором?
Ответ: Она зависит от частоты питающего напряжения и количества пар полюсов и скольжения. Преобразователь частоты позволяет регулировать частоту питающего напряжения и тем самым скорость вращения вала ЭД.
Преобразователь частоты позволяет регулировать частоту питающего напряжения и тем самым скорость вращения вала ЭД.
12. Какое значение имеет скорость вращения вала электродвигателя при его работе от сети?
Ответ: Скорость равна номинальной частоте двигателя.
13. Какова скорость вращения вала электродвигателя при его работе от ПЧ?
Ответ: Скорость регулируется от ПЧ .
14. Как связан момент с током электродвигателя?
Ответ: Для двигателя с постоянными магнитами момент пропорционален току статора. Для асинхронных двигателей зависимость между током и моментом нелинейная, но в рабочей зоне рост тока приводит к росту момента.
15: Какие существуют способы подключения обмоток двигателя?
Ответ: Треугольник, Звезда (изменяется номинальное напряжение и ток двигателя).
16: При подключении в звезду или треугольник будет больше номинальное линейное напряжение двигателя?
Ответ: Линейное напряжение будет больше для звезды (соответственно ток наоборот меньше).
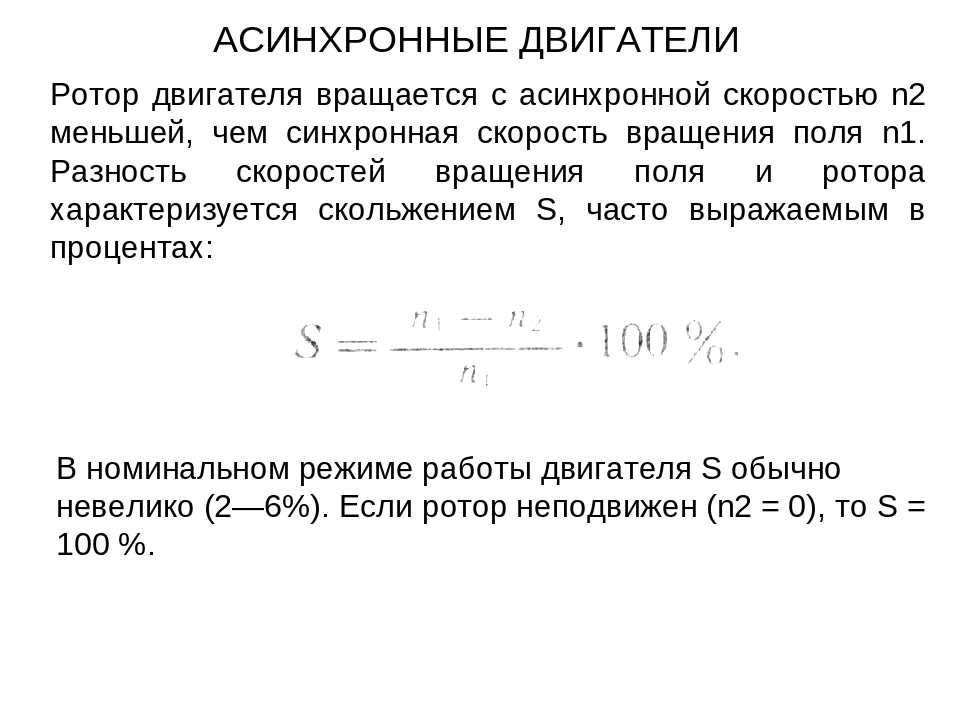
17: Что такое скольжение?
Ответ: Скольжение – это разница между скоростью поля статора и частотой вращения ротора в процентах.
Смотрите так же:
Функция «Спящий режим» преобразователя частоты Danfoss FC-051 (Реализация на встроенном контроллере)
Управление частотным преобразователем Danfoss серии FC51 с панели оператора Weintek MT8121XE1WK
Для заказа преобразователя частоты перейдите в каталог по ссылке — VLT Micro Drive
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.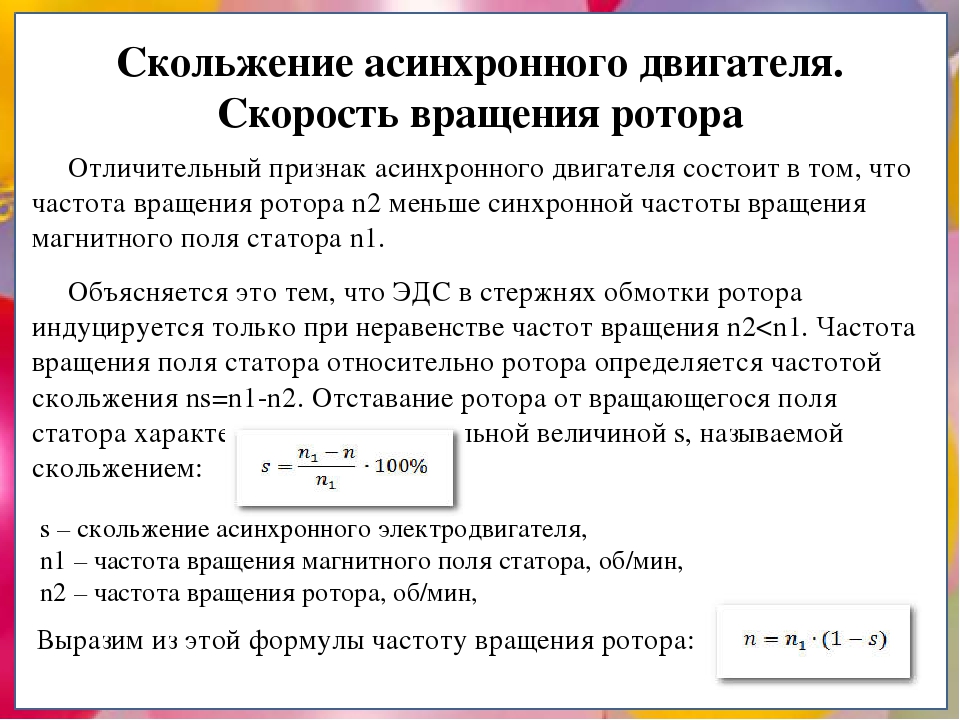
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Как определить скорость вращения электродвигателя
Главное меню:
- Основы
- Электромашины
- Оборудование
- Нормы
- Подстанция
- Комплектные трансформаторные подстанции
- Оборудование подстанций
- Вакуумные выключатели
- ВВ/TEL
- ВР
- ВРО
- ВР1
- ВР1 для КСО
- ВРС
- 3АН5
- ВГГ-10
- Камеры КСО
- Ограничители перенапряжений 6(10) кВ
- Масляный выключатель
- ВПМ-10
- Техническое описание ВПМ
- ВМП-10
- ВМГ-133
- Выключатель нагрузки автогазовый ВНА
- Описание выключателя
- Изображение выключателя
- Ремонт электрооборудования
- Повышение надежности МВ, приводов МВ
- Установки компенсации реактивной мощности
- Общие сведения об УКРМ
- УКРМ 0,4 кВ
- УКРМ 6(10) кВ
- Выбор места расположения питающих подстанций
- Электроснабжение
- Освещение
- Воздушная линия
Основы > Задачи и ответы > Сборник задач — электрические машины
Асинхронные электродвигатели (страница 2)
1.
Определить угловую скорость вращении ротора асинхронного электродвигателя, если обмотка статора четырехполюсная, частота напряжения сети, к которой присоединен электродвигатель, 50 Гц и скольжение ротора равно 3,5%.Решение: Частота токов, проходящих в обмотках статора, равна частоте напряжения сети: Кроме того, известно, что обмотка статора четырехполюсная, т. е. число пар полюсов р = 2.
Скорость вращения магнитного потока, вызываемого трехфазной системой токов, проходящих в обмотках статора, зависит от частоты этих токов
и числа пар полюсов обмотки р, так как , откуда число оборотов в минуту вращающегося синхронно магнитного потока Угловая скорость вращения Вращение ротора асинхронного электродвигателя возможно лишь при наличии отставания ротора от вращающегося магнитного потока. Величина, характеризующая это отставание, называется скольжением: — скорость вращения магнитного потока; — скорость вращения ротора.Подставив числовые значения, получим Угловая скорость вращения ротора2. На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ) является скорость .Следовательно, скольжение ротора Число пар полюсов обмотки статора
На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ) является скорость .Следовательно, скольжение ротора Число пар полюсов обмотки статора
В момент пуска ротор неподвижен
. Поэтому скольжение при пуске Такое значение имеет скольжение ротора в момент пуска любого асинхронного электродвигателя.
Таблица 13
| р пар полюсов | 1 | 2 | 3 | 4 | 5 |
| n, об/мин | 3000 | 1500 | 1000 | 750 | 600 |
3.
В разрыв провода линии, соединяющей контактные кольца ротора асинхронного электродвигателя с трехфазным реостатом, введен магнитоэлектрический амперметр, шкала которого имеет нулевое значение посередине (рис. 80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
Решение:
Полное колебание указательной стрелки соответствует полному периоду тока в обмотке ротора. Если 60 полных колебаний (периодов) произошло за полминуты, то число полных колебаний (периодов) в секунду равно двум. Следовательно, Магнитный поток в асинхронном электродвигателе вращается относительно ротора со скоростью, равной разности скоростей: причем частота тока в роторе Подставив числовые значения, получим
При шестиполюсной обмотке статора и частоте токов в цепи статора
скорость вращения магнитного потока
Подставим в выражение для
откуда скорость вращения ротора4.
Так как пусковой момент при номинальном напряжении , то при понижении напряжения в сети на 5% пусковой момент Таким образом, пуск при этих условиях позволит электродвигателю развить вращающий момент больше номинального.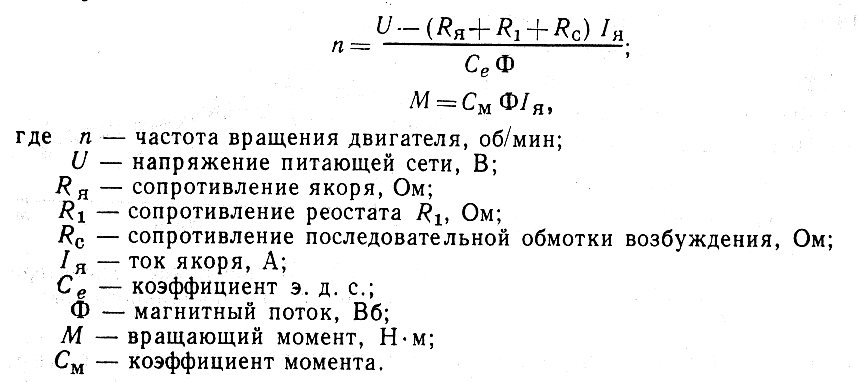
Если напряжение в сети понизится на 10% и составит
Пусковой момент при указанном понижении напряжения долю, которую составляет пусковой вращающий момент от вращающего момента при номинальном напряжении. Тогда для возможности пуска электродвигателя при номинальной нагрузке должно быть выполнено равенство Поэтому при пуске электродвигателя напряжение сети может составлять от номинального напряжения долю
Таким образом, при заданной кратности пускового момента от номинального
понижение напряжения в сети может происходить на и пуск может быть осуществлен при номинальной нагрузке на валу электродвигателя.
6. Асинхронный электродвигатель с короткозамкнутым ротором типа А51-4 имеет следующие номинальные данные: ; кратность вращающих моментов .
Определить вращающие моменты: номинальный , максимальный и пусковой Решение:
Номинальный вращающий момент можно определить из основного соотношения измерен в и мощность Р — в Вт. При этом Если подставить сюда в качестве Р мощность, измеренную в киловаттах, то число будет в 1000 раз меньше.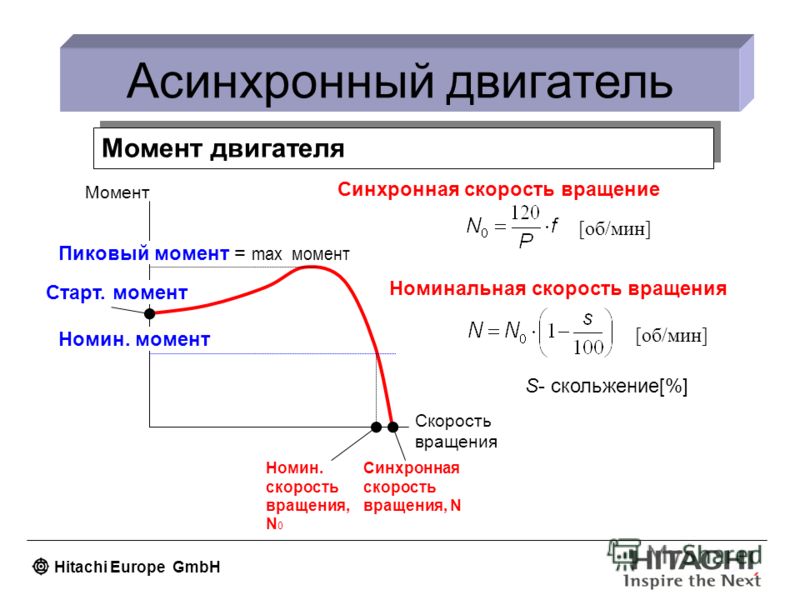 Таким образом, при тех же единицах измерения вращающего момента получим Подставим величины номинального режима: Используя известные кратности моментов, максимальный вращающий момент пусковой вращающий момент7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.Решение: Номинальный вращающий момент
Таким образом, при тех же единицах измерения вращающего момента получим Подставим величины номинального режима: Используя известные кратности моментов, максимальный вращающий момент пусковой вращающий момент7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.Решение: Номинальный вращающий момент
Перегрузочная способность
l = 2,1 представляет собой отношение максимального вращающего момента к номинальному вращающему моменту Номинальному вращающему моменту соответствует и номинальное скольжение подставлена ближайшая большая (по отношению к ) синхронная скорость вращения магнитного потока статора.Зависимость между вращающим моментом и скольжением ротора s в асинхронном двигателе выражается формулой означает критическое скольжение, а и s соответствуют одному и тому же режиму работы. Если в левую часть подставить , то в качестве s следует подставить .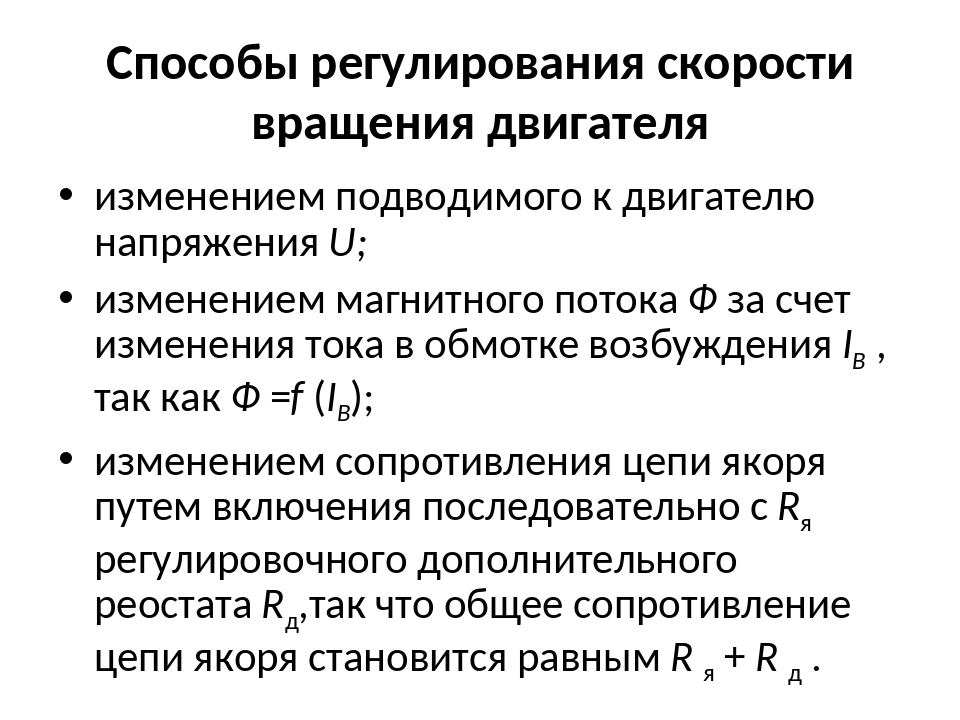 Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.Так как Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим Корни полученного квадратного уравнения Далее берется только больший из корней (при положительном знаке перед корнем):
Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.Так как Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим Корни полученного квадратного уравнения Далее берется только больший из корней (при положительном знаке перед корнем):
Подставив в формулу, выражающую зависимость между вращающим моментом
и скольжением ротора s, численные значения , получим требуемую зависимость
Смотри полное содержание по представленным решенным задачам на websor.
Как определить число пар полюсов асинхронного двигателя?
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту.
Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.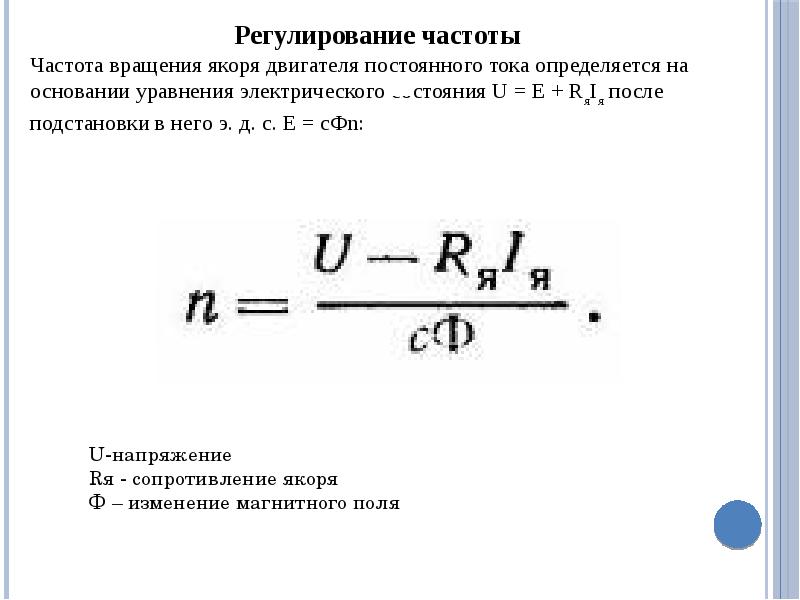
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор.
По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра.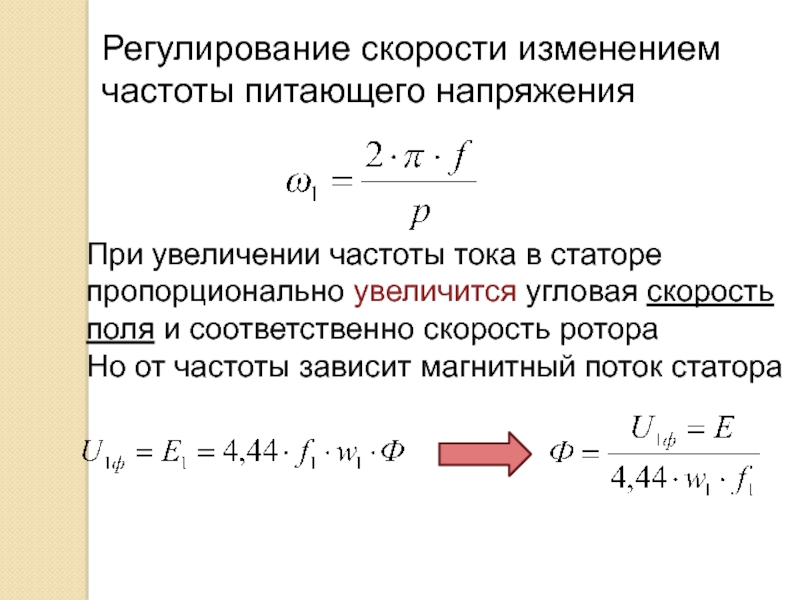
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой.
Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
FAQ по электродвигателям
Какие электродвигатели применяются чаще всего? Какие способы управления электродвигателями используются? Как прозвонить электродвигатель и определить его сопротивление? Как определить мощность электродвигателя? Как увеличить или уменьшить обороты электродвигателя? Как рассчитать ток и мощность электродвигателя? Как увеличить мощность электродвигателя? Каковы потери мощности при подключении трехфазного двигателя к однофазной сети? Какие исполнения двигателей бывают? Зачем электродвигателю тормоз? Как двигатель обозначается на электрических схемах? Почему греется электродвигатель? Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера.
Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению.
Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение.
Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности.
Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала.
Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП).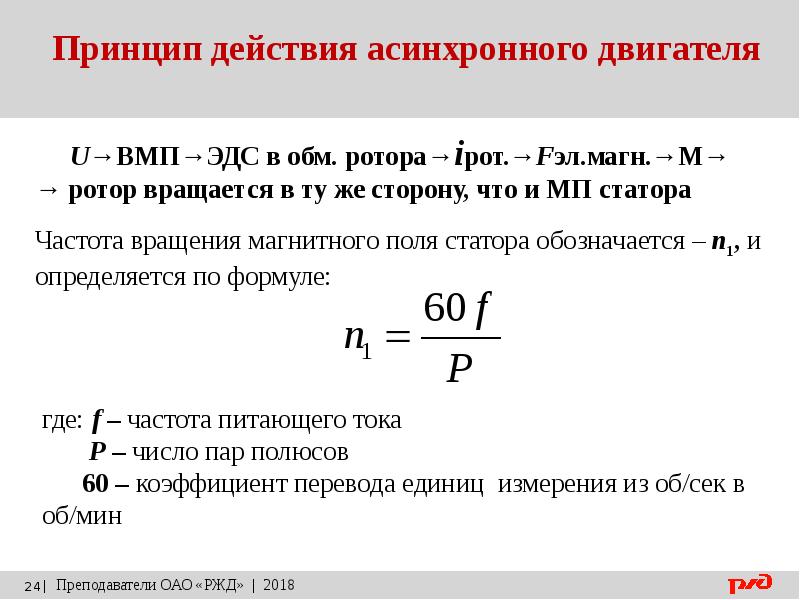 Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику.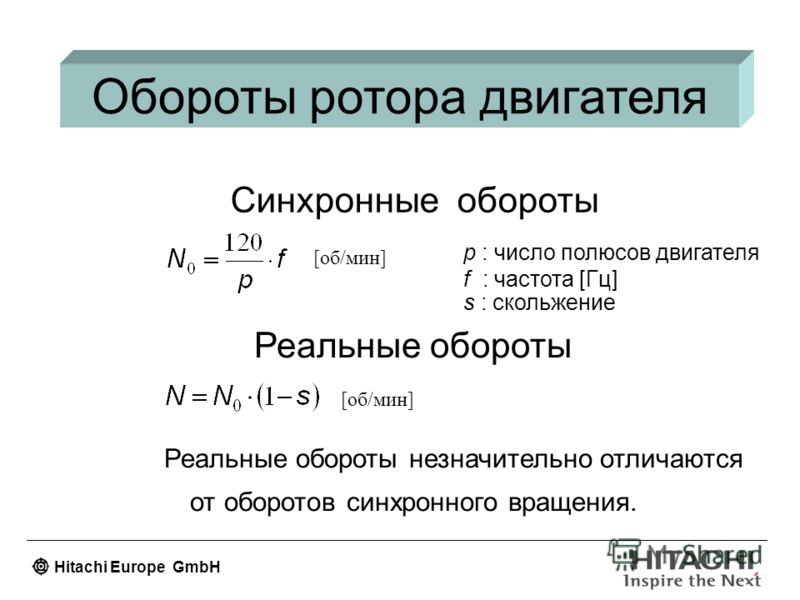 На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.
На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.
Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам.
При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.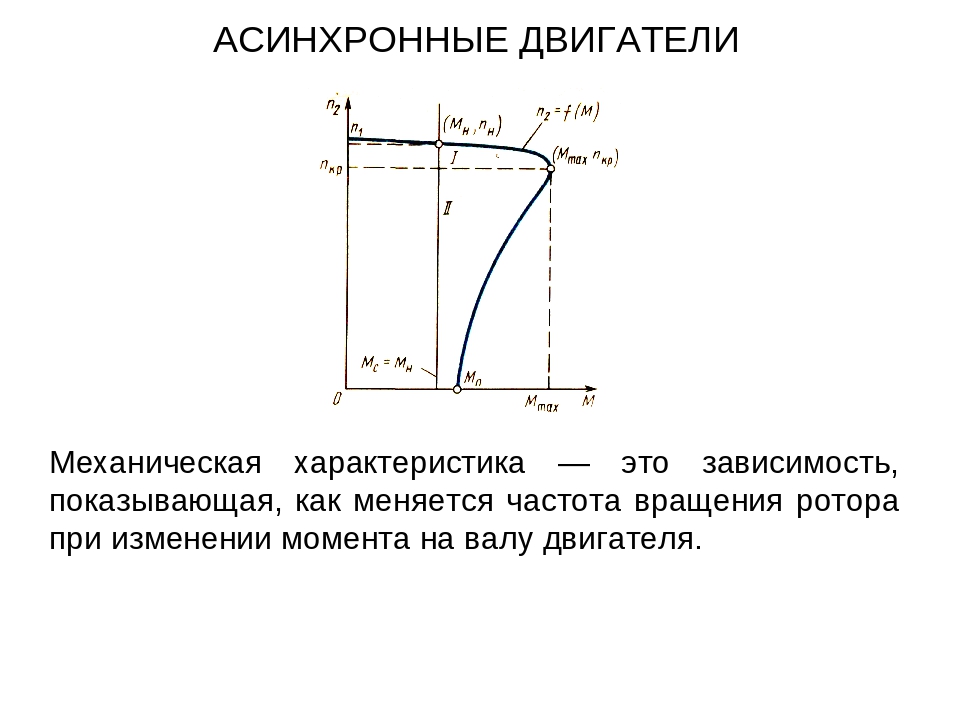
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
- Р = I (1,73·U·cosφ·η)
- где: Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике), I – ток двигателя, А, U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
- cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
- Для расчета тока по известной мощности пользуются обратной формулой:
- I = P/(1,73·U·cosφ·η)
- Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.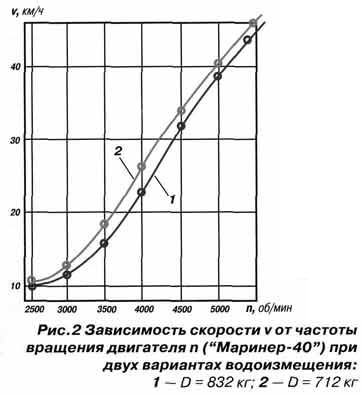
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
- 13. Типичные неисправности электродвигателей
- Выделяют два вида неисправностей электродвигателей: электрические и механические.
- К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы.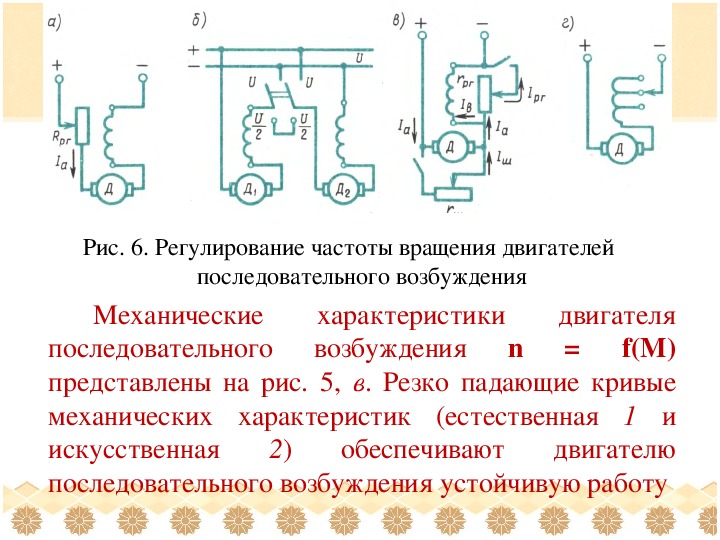 Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы: Выбор электродвигателя Использование тормозных резисторов с преобразователями частоты
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования.
Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора.
Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения.
Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе.
Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель.
При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ.
totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD).
При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы.
Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель.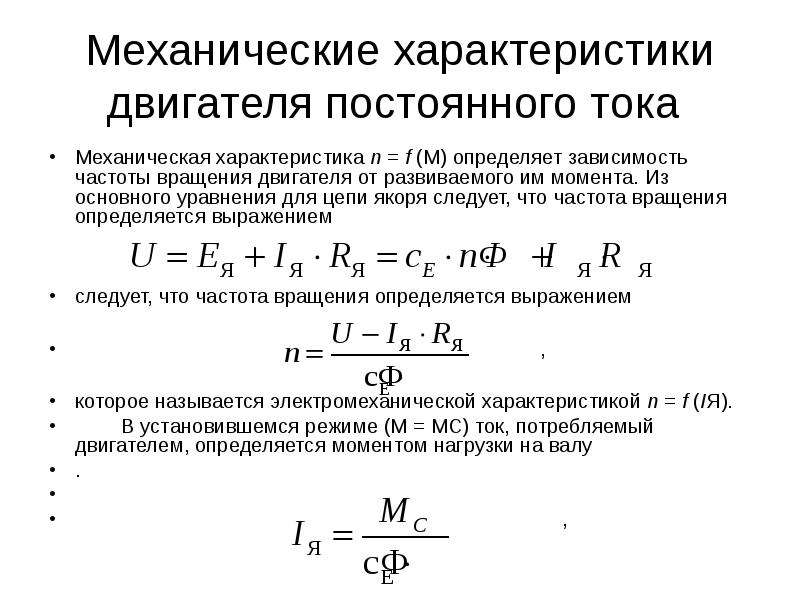 Среди них можно выделить две главные:
Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В.
Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять.
Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости.
По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ.
CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах.
Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха.
Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель.
Производительность такого устройства не связана с системой управления электропривода.
В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего моментаПри выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели.
Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно.
Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
| Число полюсов, N | Скорость, об/мин | Крутящий момент, л. с. / фут-фунт |
| 2 | 3600 | 1,46 |
| 4 | 1800 | 2,92 |
| 6 | 1200 | 4,38 |
| 8 | 900 | 5,84 |
| 10 | 720 | 7,29 |
| 12 | 600 | 8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Как определить мощность и обороты электродвигателя без бирки?
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Как определить скорость вращения электродвигателя
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы.
 Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит. - Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты – это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин.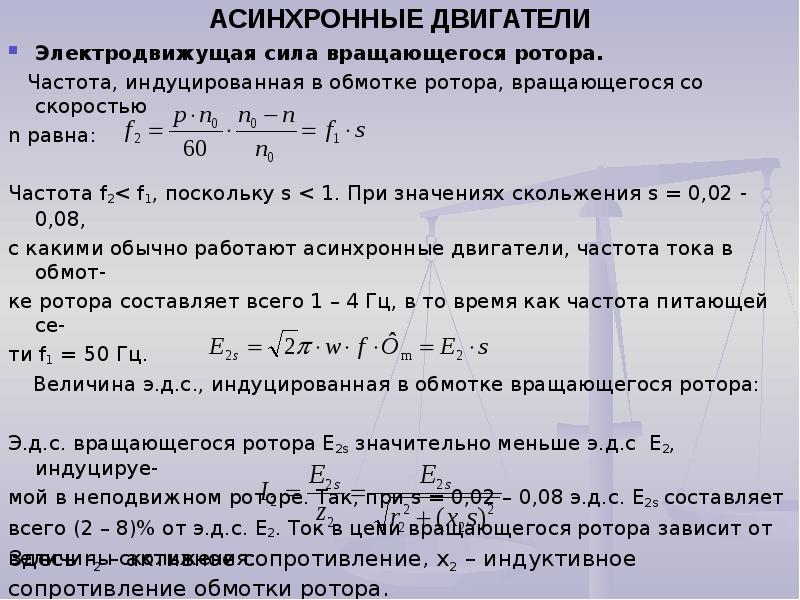 одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Микроконтроллер управляет всем процессом работы преобразователя
Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.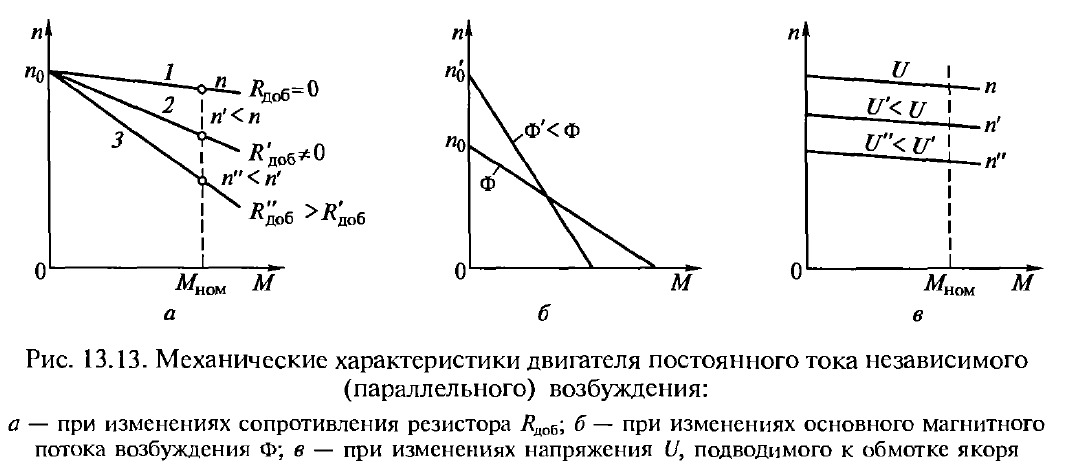
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Рыженков
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором.
 При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений; - Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание!
Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.
или вот еще подборочка.
spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту. От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Влияние скорости вращения шпинделя жесткого диска
Винчестеры бывают двух форматов LFF и SFF, если рассказать в двух словах, то один имеет формат 2,5 дюйма, а второй 3,5. Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Если посмотреть среднюю скорость стандартных 3,5 » жестких дисков, то это скорость вращения шпинделя 7200 оборотов в минуту. Время совершения половины оборота в среднем (Avg. Rotational Latency) для таких дисков 4,2 мс. Эти диски обычно имеют среднее время поиска около 8,5 мс, что дает средний доступ к времени данным около 12,7 мс.
Есть диски, которые имеют скорость вращения магнитных пластин 10000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У Рапторов также и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которые скорость вращения шпинделя 15 000 оборотов в минуту, и еще меньшие пластины. Среднее время Rotational Latency 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, и среднее время доступа к данным — 5,8 мс.
Диски с высокой частотой вращения шпинделя имеют низкие значения времени поиска и Rotational Latency даже при произвольном доступе. Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
При этом при последовательном доступе к данным большими блоками разница будет несущественна, так как не будет задержки на доступ к данным, поэтому для жестких дисков рекомендуется регулярно делать дефрагментацию.
У 2,5 коллег, скорость так же скачет от 5400 до 15 000 оборотов в минуту.
Регулирование скорости асинхронного двигателя
Вопрос, связанный с регуляцией скорости вращения электрического низковольтного двигателя , становится все более актуальным. Дело в том, что сокращение или увеличение числа оборотов, совершаемых оборудованием, важно для стабильной работы различных приборов, в частности, для механизмов, которые применяются для облегчения бытовых работ. На первый взгляд может показаться, что проще всего будет решить проблему за счет снижения напряжения, питающего двигатель. Однако, данный вариант подходит только для моделей постоянного тока. В них регуляторы напряжения отличаются лаконичностью конструкции. Кроме того, они вполне доступны. Тем не менее, в последнее время большая часть устройств, принимающих участие в производственном процессе, основываются на двигателях переменного тока асинхронного типа. В подобной ситуации в случае снижения напряжения двигатель начинает резко сокращать число оборотов, утрачивает мощность и тормозит.
Для регулирования скорости вращений существует более современный способ. Он предполагает применения частотных инвенторных преобразователей, которые в обиходе все чаще называются частотниками. Они нередко используются в различных сферах. Например, их часто применяют для оборудования станков и электрических приводов, входящих в состав промышленного оборудования.
Принцип функционирования частотника довольно прост. Его суть заключается в правиле определения вытяжной угловой скорости вращения вала. При этом важно учитывать такой немаловажный фактор, как частота сети, обеспечивающей питание. За счет изменения частоты питания появляется возможность регуляции скорости вращения ротора. Каждый частотный преобразователь снабжается специальной табличкой. На ней указываются основные характеристики.
Электродвигатель: особенности управления Возврат к спискуВращение электродвигателя
Работа электродвигателя осуществляется по принципу электромагнитной индукции. Неподвижная часть — статор для электродвигателей переменного тока и индуктор для моторов постоянного тока. Подвижной частью служит ротор для синхронных и асинхронных электродвигателей, якорь – для электродвигателей постоянного тока.
Принцип вращения электродвигателя
- Вращение электродвигателя происходит за счет вращающего магнитного поля, которое проходит через короткозамкнутую обмотку непосредственно ротора и приводит ток индукции. Ротор начинает вращаться. Обороты электродвигателя зависят от количества пар магнитных полюсов. При соответствующей разнице между частотами вращения магнитного поля статора и вращения ротора происходит момент скольжения. Асинхронный электродвигатель характеризуется тем, что частота вращения ротора не совпадает с частотой вращения магнитного поля статора.
- Синхронные электродвигатели отличаются конструкцией ротора. Частота вращения ротора и магнитного поля статора полностью совпадают. При этом запуск проводится с помощью ротора с короткозамкнутой обмоткой или вспомогательного асинхронного электродвигателя.
- Частота вращения электродвигателя указана в технических характеристиках от производителя, где Вы сможете подробно ознакомиться со всеми характеристиками и остановить свой выбор на электродвигателе с нужными параметрами.
- Асинхронные электродвигатели применяются во всех отраслях промышленности. Из названия «асинхронный» ясно, что вращение электродвигателя происходит в соответствии с вращением ротора, которое отличается от вращения поля электромагнитного поля статора.
Регулировка частоты вращения электродвигателя с параллельным возбуждением
Частоту вращения электродвигателя постоянного тока можно менять тремя способами – изменением магнитного потока, изменением сопротивления в цепи якоря и изменением питающего напряжения.
Все способы применяются относительно редко, и проводить любые изменения вращения электродвигателя, а также менять обороты можно доверить только профессиональным специалистам, которые хорошо знакомы со схемами применяемых изменений и смогут все выполнить в соответствии с техническими правилами.
При выборе электродвигателя обращайте внимание на все технические параметры, на обороты вращения, чтобы в процессе эксплуатации не было необходимости что-то менять или исправлять.
Просмотров: 1668
Дата: Воскресенье, 15 Декабрь 2013
Скольжение электродвигателя
В процессе взаимодействия магнитного поля и тока в роторе асинхронного электродвигателя создается вращающий момент, который позволяет уровнять скорость статора, ротора и вращения электромагнитного поля. Величина скольжения электродвигателя характеризуется скоростью вращения ротора, статора и магнитного поля.
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Определение величины скольжения электродвигателя
Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим.
Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Просмотров: 5032
Дата: Воскресенье, 15 Декабрь 2013
Что определяет скорость вращения двигателя?
Электродвигатели характеризуются своим разнообразием, от единиц дробной мощности для небольших приборов до двигателей мощностью в тысячи л.с. для тяжелого промышленного использования. Другие характеристики, указанные на паспортных табличках двигателя, включают входное напряжение, номинальный ток, КПД и скорость в об / мин.
Скорость электродвигателя определяется его физической конструкцией и частотой подачи напряжения. Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, аналогично тому, как указывается мощность в зависимости от механической нагрузки.
Убедитесь, что в вашем здании есть подходящий двигатель для каждого применения.
Как частота источника питания соотносится со скоростью двигателя
В зависимости от страны источник питания может иметь частоту 60 Гц или 50 Гц. Хотя трехфазный двигатель будет вращаться с обоими входами мощности, возникнут проблемы с производительностью, если двигатель указан для одной частоты и используется с другой.
Поскольку источник питания 60 Гц переключает полярность на 20% быстрее, чем источник питания 50 Гц, двигатель, рассчитанный на 50 Гц, будет вращаться на 20% выше об / мин при подключении к 60 Гц.Крутящий момент двигателя остается относительно постоянным, и по этой причине более высокая скорость приводит к более высокой мощности на валу. Хотя двигатель выделяет больше тепла, это компенсируется тем, что охлаждающий вентилятор также ускоряется. Однако двигатель имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
С другой стороны, подключение двигателя 60 Гц к источнику питания 50 Гц — более тонкий вопрос. Уменьшение скорости при сохранении того же напряжения может привести к насыщению магнитного сердечника двигателя, увеличению тока и перегреву устройства.В этом случае самый простой способ предотвратить насыщение — снизить входное напряжение. В идеале соотношение В / Гц должно оставаться постоянным:
- Двигатель 60 Гц, работающий при 50 Гц, составляет 83,3% от номинальной частоты.
- Чтобы поддерживать постоянное соотношение В / Гц, входное напряжение также следует снизить до 83,3%.
- Если электродвигатель обычно работает при 240 В и 60 Гц, входное напряжение при 50 Гц должно быть 200 В, чтобы соотношение составляло 4 В / Гц.
Электропроводка и количество полюсов
У постоянного магнита два полюса, но двигатели можно подключить так, чтобы их магнитное поле имело большее количество полюсов.Двухполюсный двигатель совершает полный оборот с одним изменением полярности, в то время как четырехполюсный двигатель вращается только на 180 ° с одним переключателем полярности. По этой причине большее количество полюсов приводит к снижению скорости двигателя: если все остальные факторы равны, 4-полюсный электродвигатель будет вращаться со скоростью, вдвое меньшей, чем 2-полюсный электродвигатель.
- Источник питания 60 Гц меняет полярность 60 раз в секунду, а двухполюсный двигатель будет вращаться со скоростью 3600 об / мин при подключении к этому источнику. Однако четырехполюсный двигатель будет вращаться только со скоростью 1800 об / мин.
- Для двигателей с частотой 50 Гц соответствующие скорости составляют 3000 об / мин при 2 полюсах и 1500 об / мин при 4 полюсах.
Эту концепцию можно резюмировать следующим уравнением:
Применяя вышеприведенное уравнение, 4-полюсный двигатель с частотой 60 Гц имеет скорость 1800 об / мин, а 6-полюсный двигатель с частотой 50 Гц имеет скорость 1000 об / мин. Однако на самом деле это скорость магнитного поля, называемая синхронной скоростью, которая не всегда соответствует скорости вала.
- Если двигатель синхронный, ротор использует постоянный магнит или электромагнит для вращения с расчетной скоростью.
- С другой стороны, асинхронный двигатель будет работать немного ниже расчетной скорости вращения. Это естественное следствие явления электромагнитной индукции, и его не следует рассматривать как неисправность.
Если на паспортной табличке электродвигателя указана частота вращения 1800 об / мин, можно сделать вывод, что это 4-полюсный синхронный двигатель, рассчитанный на 60 Гц. С другой стороны, если скорость, указанная на паспортной табличке, меньше значения, например 1760 об / мин, агрегат является асинхронным двигателем.
Преобразователи частоты управляют скоростью двигателя, регулируя входную частоту, отсюда и их название.Они также модулируют напряжение, чтобы поддерживать соотношение В / Гц ниже точки насыщения магнитопровода. По этой причине частотно-регулируемый привод не повреждает двигатель даже при снижении скорости ниже значения, указанного на паспортной табличке. Основным недостатком частотно-регулируемых приводов являются гармонические искажения, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость для электрического асинхронного двигателя определяется
- частотой источника питания и
- числом полюсов в обмотке двигателя.
Синхронную скорость можно рассчитать как:
n = f (2 / p) 60 (1)
где
n = скорость вращения вала (об / мин, об / мин)
f = частота электропитания (Гц, циклов / с, 1 / с)
p = количество полюсов
Примечание — an асинхронный двигатель никогда не достигнет своей синхронной скорости.Если бы это было так — ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между статором и полем ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничена скоростью ниже синхронной, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — синхронная скорость двухполюсного электродвигателя
На двухполюсный двигатель подается мощность с частотой 50 Гц (1 / с) .Скорость вращения можно рассчитать как
n = (50 1 / с) (2/2) (60 с / мин)
= 3000 об / мин (1 / мин)
Синхронный скорость вращения при разных частотах и количестве полюсов
| Скорость вращения вала — n — (об / мин, об / мин) | ||||||
|---|---|---|---|---|---|---|
| Частота — f — (Гц) | Количество полюса — p — | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | |
| 10 | 600 | 300 | 300 | 100 | ||
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 |
| 30 | 1800 | 900 | 600 | 90 176 450360 | 300 | |
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 |
| 3000 | 750 | 600 | 500 | |||
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 | 9017 | 70176 | 1050 | 840 | 700 |
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 |
| 1080 | 900 | |||||
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 |
- Двигатели, рассчитанные на 50 Гц, чаще всего встречаются за пределами U.S
- Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.
Частотно-регулируемый привод
Частотно-регулируемый привод модулирует скорость электродвигателя путем изменения частоты источника питания.
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя.В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного токауникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя. Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов.В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре. Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью приблизительно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений — и будет немного ниже — потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента.Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока. Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительную информацию о скольжении можно найти в нашем блоге «Синхронные и асинхронные двигатели: обнаруживая разницу».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется.Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако эта возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила будет потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного токаХотя двигатели постоянного тока с постоянными магнитами также имеют полюса, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока. Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов влияют на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для блока, и двигатель сможет работать только на скорости, рассчитанной на 12 В.Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительный нагрев, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант использования редукторного двигателя. Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Электродвигатель— Принципы работы трехфазного двигателя — Роторный, полевой, магнитный и синхронный
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в корпусе переменного тока.Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля. Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения. По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в пределах цикла тока, тот полюс поля, магнитное поле которого является наибольшим, постоянно изменяется между тремя полюсами, в результате чего магнитное поле, видимое ротором, вращается.Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и количества полюсов, создаваемых обмоткой статора. Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3600 об / мин.
В трехфазном асинхронном двигателе обмотки ротора не подключены к источнику питания, а по существу являются короткими замыканиями. Наиболее распространенный тип обмотки ротора, обмотка с короткозамкнутым ротором, очень похожа на ходовое колесо, используемое в клетках для домашних животных песчанок .Когда двигатель первоначально включен, а ротор неподвижен, проводники ротора испытывают изменяющееся магнитное поле, распространяющееся с синхронной скоростью. Согласно закону Фарадея, эта ситуация приводит к наведению токов вокруг обмоток ротора; величина этого тока зависит от импеданса обмоток ротора. Поскольку условия для работы двигателя теперь выполнены, то есть токопроводящие проводники находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться.Ротор никогда не может вращаться с синхронной скоростью, потому что не будет относительного движения между магнитным полем и обмотками ротора, и не может возникнуть ток. Асинхронный двигатель имеет высокий пусковой момент.
В двигателях с короткозамкнутым ротором скорость двигателя определяется нагрузкой, которую он перемещает, и числом полюсов, создающих магнитное поле в статоре. Если некоторые полюса включены или выключены, скорость двигателя можно регулировать с приращением. В двигателях с фазным ротором сопротивление обмоток ротора может быть изменено извне, что изменяет ток в обмотках и, таким образом, обеспечивает непрерывное регулирование скорости.
Трехфазные синхронные двигатели сильно отличаются от асинхронных двигателей. В синхронном двигателе ротор использует катушку под напряжением постоянного тока для создания постоянного магнитного поля. После того как ротор приближается к синхронной скорости двигателя, северный (южный) полюс магнита ротора блокируется с южным (северным) полюсом вращающегося поля статора, и ротор вращается с синхронной скоростью. Ротор синхронного двигателя обычно включает обмотку с короткозамкнутым ротором, которая используется для запуска вращения двигателя до подачи питания на катушку постоянного тока.Беличья клетка не действует на синхронных скоростях по причине, описанной выше.
Однофазные асинхронные и синхронные двигатели, используемые в большинстве бытовых ситуаций, работают по принципам, аналогичным принципам, описанным для трехфазных двигателей. Однако для создания пусковых моментов необходимо внести различные модификации, поскольку одна фаза не будет генерировать только вращающееся магнитное поле. Следовательно, в асинхронных двигателях используются конструкции с расщепленной фазой, конденсатором , пуском или заштрихованными полюсами.Синхронные однофазные двигатели, используемые для таймеров, часов, магнитофонов и т. Д., Основаны на схемах сопротивления или гистерезиса.
Асинхронные двигатели переменного тока| Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните этоРеклама
Криса Вудфорда. Последнее изменение: 21 апреля 2020 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из моторы, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают.Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле. Рассмотрим подробнее!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, демонстрирующий медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Изображение: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют электрический ток каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном направлении.
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита. (Физики назвали бы это проводник с током сидит в магнитном поле.) вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть.Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся хитроумным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, а это значит, что проволока будет продолжать вращаться в в том же направлении до тех пор, пока течет ток. Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Прежде чем мы перейдем к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю, статическую часть двигатель (статор), а катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который постоянный магнит, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Как работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: на них подается не постоянный ток, а переменный ток (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока вам нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другая свободно вращающаяся металлическая деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете мощность на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создавая магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда проще заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле создает (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что вызывает это — вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, по очереди запитываются источником переменного тока (не показан, но поступают к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока.Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и при отсутствии нагрузки на двигатель приближается к скорости вращающегося магнитного поля. На практике нагрузка на двигатель (независимо от того, что он ведет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод.Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете схемой, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор.Количество отдельных электрических токов, возбуждающих катушки независимо, не в шаге, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ). В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота. У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и требуют замены время от времени.Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Иллюстрации: Электродвигатели чрезвычайно эффективны, обычно преобразовывая около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу. Тем не менее, довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения.Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его внешнюю часть корпуса, минуя теплоотводящие ребра. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания.Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный). Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, которые поочередно возбуждаются генератором справа.Это произведение взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. Приехав в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками.Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Tesla отстаивал AC, а Эдисон был полон решимости управлять миром на DC и придумал все виды рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси переменным током, чтобы показать, насколько это было смертельно опасно и жестоко). Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла спроектировал его в 1880-х годах (его патент, показанный здесь, был выдан в мае 1888 года). Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Узнать больше
На сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
- Электроэнергия для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка. Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12.
- Эксперименты с электродвигателем Эда Соби.Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте 11–14 лет.
- Сила и энергия Криса Вудфорда. Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в изобретателях и изобретениях, том 5.Нью-Йорк: Маршалл Кавендиш, 2008. Краткая биография Tesla, которую я написал несколько лет назад. На момент написания все это, похоже, было доступно в Интернете по этой ссылке в Google Книгах. Возраст 9–12.
Патенты
Патентыпредлагают более глубокие технические детали и собственные идеи изобретателя о своей работе. Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г.Патент на оригинальный асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 года. Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом от Umesh C.Gupta, Vickers, Inc. 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020.Все права защищены. Полное уведомление об авторских правах и условиях использования.
Подписывайтесь на нас
Поделиться страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом друзьям с помощью:
Цитируйте эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html. [Доступ (укажите дату здесь)]
Подробнее на нашем сайте…
Скорость вращения — обзор
8.3 Конструкция [2,4]
Фундаментальное решение при проектировании дизель-генераторной станции начинается с желаемой выходной мощности. После того, как выходная мощность окончательно определена, следующим шагом будет принятие решения о выборе двухтактного или четырехтактного дизельного двигателя. Большие тихоходные двигатели двустороннего действия (80–200 об / мин) относятся к двухтактному типу. Для легких высокоскоростных (1000–2500 об / мин) двигателей следует отдавать предпочтение четырехтактному циклу.Среднеоборотные (200–1000 об / мин) двигатели могут работать в обоих циклах.
Отдельные части низкооборотных двухтактных двигателей сравнительно тяжелы, в то время как детали четырехтактных двигателей намного легче. Двухтактные двигатели оснащены меньшим количеством цилиндров, по сути, меньше движущихся частей. Таким образом, стоимость обслуживания двухтактных двигателей обычно ниже, чем у двигателей средней или высокой скорости. При той же выходной высоте машинного отделения четырехтактного двигателя высота машинного отделения меньше, чем требуется для двухтактного двигателя.
Смазка поршневых колец в четырехтактных двигателях лучше, чем в двухтактных. Удельный расход смазочного масла у двухтактного двигателя меньше, чем у четырехтактного.
Низкооборотные двигатели обычно имеют горизонтальные цилиндры. Для более высоких скоростей предпочтительны вертикальные цилиндры.
Частота вращения двигателя всегда должна соответствовать частоте сети электростанции во всех отношениях.Следовательно, скорость двигателя рассчитывается следующим образом:
(8,28) n = 60f / p
, где
n = частота вращения, об / мин
f = частота сетки , Гц
p = Число пар полюсов
В двигателе с воспламенением от сжатия давление сжатия должно быть достаточно высоким, обычно от 11,5: 1 до 22: 1, чтобы обеспечить зажигание при любых условиях. Примерное давление сжатия колеблется от 2.От 8 МПа до 4,8 МПа. Более высокая степень сжатия дает более высокий тепловой КПД или более высокую выходную мощность, но приводит к более высокой нагрузке на рабочие части.
Еще один фактор, влияющий на конструкцию, — это количество цилиндров двигателя, которое необходимо учитывать. Как только число известно, можно определить диаметр цилиндра (d) и ход (l) двигателя. Отношение хода к диаметру отверстия (l / d) обычно варьируется от 0,9 до 1,9. Для двухтактных двигателей с оппозитными поршнями могут быть выбраны более высокие значения l / d, вплоть до 2,5 или около того.
Зная все данные, как объяснено выше, ожидаемая выходная мощность спроектированного блока может быть определена с помощью уравнения. 8,29:
(8,29) W = план / 333,5
где
Вт = Выходная мощность, кВт
p = Давление сжатия, МПа
л = Ход, м
a = Площадь внутреннего поперечного сечения цилиндра, см 2
n = Скорость вращения, об / мин
После этого необходимо определить, соответствует ли ожидаемая мощность желаемый результат.(Примечание: 1 МПа = 10,2 кг / см 2 , 1 л. 10
NEETS Модуль 5 — Введение в генераторы и двигатели
Страницы i — ix, От 1-1 до 1-10, От 1-11 до 1-20, 1-21 до 1-30, 1-31 к 1-34, От 2-1 до 2-10, 2-11 до 2-16, С 3-1 по 3-10, С 3-11 по 3-22, С 4-1 по 4-10, С 4-11 по 4-18, индекс
ГЛАВА 2
ДВИГАТЕЛИ ПРЯМОГО ТОКА
ЦЕЛИ ОБУЧЕНИЯ
По завершении этой главы вы сможете:
1.Укажите факторы, определяющие
направление вращения в двигателе постоянного тока.
2. Сформулируйте правило правой руки для двигателей.
3. Опишите основные различия и сходства между генератором постоянного тока и двигателем постоянного тока.
4. Опишите причину и следствие противо-ЭДС в двигателе постоянного тока.
5. Объясните значение термина «нагрузка».
относится к электродвигателю.
6. Перечислите преимущества и недостатки различных типов постоянного тока.
моторы.
7. Сравните типы арматуры и их применение.
8. Обсудите средства управления скоростью и направлением двигателя постоянного тока.
9. Опишите действие
реакция якоря в двигателе постоянного тока.
10. Объясните необходимость пускового резистора в двигателе постоянного тока.
ВВЕДЕНИЕ
Двигатель постоянного тока — это механическая рабочая лошадка, которую можно использовать по-разному. Многие большие куски Оборудование зависит от двигателя постоянного тока для его движения.Скорость и направление вращения двигателя постоянного тока легко управляется. Это делает его особенно полезным для рабочего оборудования, такого как лебедки, краны и ракеты. пусковые установки, которые должны двигаться в разных направлениях и с разной скоростью.
ПРИНЦИПЫ РАБОТЫ
Работа двигателя постоянного тока основана на следующем принципе:
Проводник с током размещен
в магнитном поле, перпендикулярном магнитным линиям, стремится двигаться в направлении, перпендикулярном магнитному полю.
магнитные линии потока.
Существует определенная взаимосвязь между направлением магнитного поля,
направление тока в проводнике и направление, в котором проводник стремится двигаться. Эти отношения
лучше всего объяснить, используя ПРАВИЛО ДЛЯ ДВИГАТЕЛЕЙ ПРАВОЙ РУКИ (рис. 2-1).
2-1
Рисунок 2-1. — Правило для двигателей.
Чтобы определить направление движения проводника, вытяните большой, указательный и средний пальцы вашего
правая рука, чтобы они находились под прямым углом друг к другу.Если указательный палец направлен в направлении магнитного
поток (с севера на юг) и средний палец указывает направление тока в проводнике,
большой палец будет указывать в направлении движения проводника.
Проще говоря, двигатель постоянного тока вращается как
результат взаимодействия двух магнитных полей друг с другом. Якорь двигателя постоянного тока действует как электромагнит.
когда ток течет по его катушкам. Поскольку якорь находится в магнитном поле полюсов поля,
эти два магнитных поля взаимодействуют.Как магнитные полюса отталкиваются друг от друга, а в отличие от магнитных полюсов притягиваются друг к другу.
Другой. Как и в генераторе постоянного тока, электродвигатель постоянного тока имеет неподвижные полюса возбуждения и включаемый якорь.
подшипники в пространстве между полюсами поля. Якорь двигателя постоянного тока имеет обмотки, как и
якорь генератора постоянного тока. Эти обмотки также подключены к сегментам коммутатора. Двигатель постоянного тока состоит из
те же компоненты, что и генератор постоянного тока. Фактически, большинство генераторов постоянного тока можно заставить работать как двигатели, и наоборот.
Посмотрите на простой двигатель постоянного тока, показанный на рис. 2-2. Он имеет два полюса поля, один северный полюс, а другой южный полюс.
Магнитные силовые линии проходят через отверстие между полюсами с севера на юг.
Рисунок 2-2. — Вращение якоря двигателя постоянного тока.
Якорь в этом простом двигателе постоянного тока представляет собой одинарную проволочную петлю, как и в простом якоре, который вы изучали. в начале главы о генераторах постоянного тока.Однако проволочная петля в двигателе постоянного тока имеет
2-2
по нему протекает ток от внешнего источника. Этот ток вызывает появление магнитного поля.
произведено. Это поле обозначено пунктирной линией через петли. Поле петли (якоря) равно как
притягивается и отталкивается полем от полюсов поля. Поскольку ток через петлю течет по
направление стрелок, северный полюс якоря находится вверху слева, а южный полюс якоря
находится внизу справа, как показано на рисунке 2-2, (вид A).Конечно, при повороте петли (якоря) эти магнитные
полюса поворачиваются вместе с ним. Теперь, как показано на иллюстрациях, северный полюс якоря отталкивается от северного поля.
полюс и притягивается вправо южным полюсом поля. Точно так же южный полюс якоря отталкивается от
южный полюс поля и притягивается слева северным полюсом поля. Это действие приводит к повороту якоря.
по часовой стрелке, как показано на рисунке 2-2 (вид B).
После того, как петля повернулась достаточно далеко, чтобы ее
северный полюс находится точно напротив южного полюса поля, кисти переходят к следующим сегментам.Это меняет
направление протекания тока через петлю якоря. Кроме того, он изменяет полярность поля якоря, как показано на рисунке.
на рисунке 2-2 (вид C). Магнитные поля снова отталкиваются и притягиваются друг к другу, и якорь продолжает двигаться.
повернуть.
В этом простом двигателе импульс вращающегося якоря переносит якорь за пределы положения.
где точно выстроены разноименные полюса. Однако, если эти поля точно выровнены, когда якорь
ток включен, нет импульса для запуска движения якоря.В этом случае двигатель не будет вращаться.
Чтобы запустить такой двигатель, необходимо дать ему раскрутку. Этот недостаток не существует, когда есть
на арматуре больше витков, потому что имеется более одного поля якоря. Не может быть двух арматурных полей.
точно выровнено с полем от полюсов поля одновременно.
1 кв. Какие факторы определяют
направление вращения в двигателе постоянного тока?
Q2. Правило правой руки для двигателей используется для определения взаимосвязи между характеристиками двигателя?
Q3.В чем разница между компонентами генератора постоянного тока и двигателя постоянного тока?
СЧЕТЧИК ЭДС
Во время работы двигателя постоянного тока он действует как генератор постоянного тока. Есть магнитное поле от поля
полюса, и петля из проволоки поворачивается и разрезает это магнитное поле. На данный момент не обращайте внимания на то, что
через петлю провода от батареи течет ток. Поскольку стороны петли разрезают магнитное поле,
В них индуцируется напряжение, такое же, как и на сторонах контура генератора постоянного тока.Это индуцированное напряжение вызывает
ток течет в петле.
Теперь рассмотрим относительное направление между этим током и током.
что заставляет двигатель работать. Сначала проверьте направление, в котором течет ток в результате работы генератора.
происходит (вид A на рис. 2-2). (Примените правило левой руки для генераторов, которое обсуждалось в последнем
главу). Возьмитесь левой рукой так, чтобы указательный палец указывал в направлении магнитного поля (север
на юг), а большой палец указывает в направлении движения черной стороны якоря (вверх).Средний палец
затем указывает из бумаги (к вам), показывая направление тока, вызванного действием генератора в
черная половина арматуры. Это направление противоположно току батареи. Поскольку это
Напряжение срабатывания генератора противоположно напряжению аккумуляторной батареи, это называется «противо-ЭДС». (Буквы EMF обозначают
электродвижущая сила (другое название напряжения). Два тока текут в противоположных направлениях.Этот
доказывает, что напряжение аккумулятора и противо-ЭДС противоположны по полярности.
В начале этого
В ходе обсуждения мы не принимали во внимание ток якоря при объяснении того, как генерируется противо-ЭДС. Затем мы показали, что
нормальный ток якоря протекал противоположно току, создаваемому противо-ЭДС. Мы говорили о двух противоположных
токи, которые текут одновременно. Однако это
2-3
бит упрощен, как вы уже могли догадаться.На самом деле течет только один ток. Потому что счетчик ЭДС может
никогда не становятся такими же большими, как приложенное напряжение, и поскольку они имеют противоположную полярность, как мы видели,
противо-ЭДС эффективно компенсирует часть напряжения якоря. Единственный текущий ток — это ток якоря,
но он сильно снижается из-за встречной ЭДС.
В двигателе постоянного тока всегда есть счетчик ЭДС
развитый. Эта счетная ЭДС не может быть равной или больше подаваемого напряжения батареи; если бы это было, мотор
не побежит.Счетчик ЭДС всегда немного меньше. Однако противо-ЭДС противодействует приложенному напряжению.
достаточно, чтобы поддерживать ток якоря от батареи на довольно низком уровне. Если бы не было такой вещи, как счетчик
ЭДС, через якорь будет протекать гораздо больший ток, и двигатель будет работать намного быстрее. Однако нет
способ избежать встречного ЭДС.
Q4. Что вызывает противодействие ЭДС в двигателе постоянного тока?
Q5. На какие характеристики двигателя влияет противодействие ЭДС?
НАГРУЗКИ ДВИГАТЕЛЯ
Двигатели используются для вращения механических устройств, таких как водяные насосы, шлифовальные круги, лопасти вентилятора и
пилы.Например, когда двигатель вращает водяной насос, водяной насос является нагрузкой. Водяной насос — это
механическое устройство, которое должен перемещать двигатель. Это определение нагрузки двигателя.
Как с электрическим
нагрузки, механическая нагрузка, подключенная к двигателю постоянного тока, влияет на многие электрические величины. Такие вещи, как власть
взятые из линии, количество тока, скорость, эффективность и т. д. — все частично контролируются размером
нагрузка. Физические и электрические характеристики двигателя должны соответствовать требованиям нагрузки, если
работа должна выполняться без возможности повреждения нагрузки или двигателя.
Q6. Что
нагрузка на двигатель постоянного тока?
ПРАКТИЧЕСКИЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Как вы видели, двигатели постоянного тока электрически идентичны генераторам постоянного тока. Фактически, одна и та же машина постоянного тока может быть приводится в действие механически для генерирования напряжения или может приводиться в действие электрически для перемещения механической нагрузки. Пока это обычно не делается, это указывает на сходство между двумя машинами. Эти сходства будут использоваться в оставшейся части этой главы, чтобы познакомить вас с практическими двигателями постоянного тока.Вы сразу узнаете серию, шунтирующие и составные типы двигателей как напрямую связанные с их аналогами-генераторами.
СЕРИЯ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
В последовательном двигателе постоянного тока поле соединено последовательно с якорем. В
поле намотано несколькими витками большого провода, потому что оно должно пропускать полный ток якоря. Схема для
Последовательный двигатель постоянного тока показан на рис. 2-3.
2-4
Рисунок 2-3.- Двигатель постоянного тока с последовательной обмоткой.
Этот тип двигателя развивает очень большую крутящую силу, называемую крутящим моментом, после остановки.
Благодаря этой характеристике, двигатель постоянного тока серии может использоваться для управления небольшими электрическими приборами, переносными
электроинструменты, краны, лебедки, подъемники и т. д.
Другая характеристика заключается в том, что скорость меняется
широко между холостым ходом и полной нагрузкой. Серийные двигатели нельзя использовать там, где требуется относительно постоянная скорость.
в условиях переменной нагрузки.
Главный недостаток серийного двигателя связан со скоростью
характеристика, указанная в последнем абзаце. Скорость последовательного двигателя без подключенной к нему нагрузки увеличивается.
до точки, где двигатель может выйти из строя. Обычно либо повреждены подшипники, либо вылетают обмотки.
пазов в арматуре. Опасно как для оборудования, так и для персонала. Некоторая нагрузка ВСЕГДА должна быть
подключенный к последовательному двигателю, прежде чем вы его включите.Эта мера предосторожности предназначена в первую очередь для больших двигателей. Маленькие моторы,
такие как те, которые используются в электрических ручных дрелях, имеют достаточное внутреннее трение, чтобы нагружать себя.
Финал
Преимущество серийных двигателей заключается в том, что они могут работать от источника переменного или постоянного тока. Это будет
рассматривается в главе, посвященной двигателям переменного тока.
Q7. В чем главный недостаток серийного мотора?
8 кв. В чем главное преимущество серийного мотора?
ШУНТОВЫЙ ДВИГАТЕЛЬ
Шунтирующий двигатель подключается так же, как и шунтирующий генератор.Обмотки возбуждения
включены параллельно (шунтируют) обмоткам якоря. Схема подмешивающего двигателя представлена на рисунке.
2-4.
2-5
Рисунок 2-4. — Двигатель постоянного тока с параллельной обмоткой.
После регулировки скорости параллельного двигателя постоянного тока скорость остается относительно постоянной даже при изменении
условия нагрузки. Одна из причин этого заключается в том, что поток поля остается постоянным. Постоянное напряжение в поле
делает поле независимым от изменений в цепи якоря.
Если нагрузка на двигатель увеличивается,
двигатель имеет тенденцию замедляться. Когда это происходит, противодействующая ЭДС, генерируемая в якоре, уменьшается. Это вызывает
соответствующее уменьшение сопротивления току батареи, протекающему через якорь. Ток якоря
увеличивается, вызывая ускорение двигателя. Условия, которые устанавливали исходную скорость, восстанавливаются.
и исходная скорость сохраняется.
И наоборот, если нагрузка двигателя уменьшается, двигатель имеет тенденцию увеличивать скорость; счетчик ЭДС увеличивается, якорь
ток уменьшается, а скорость уменьшается.
В каждом случае все это происходит так быстро, что любой фактический
изменение скорости незначительное. Существует мгновенная тенденция к изменению, а не резкое колебание скорости.
Q9. Какое преимущество имеет параллельный двигатель перед последовательным двигателем?
СБОРНЫЙ ДВИГАТЕЛЬ
Составной двигатель имеет две обмотки возбуждения, как показано на рисунке 2-5. Один из них — это шунтирующее поле, подключенное параллельно с
арматура; другой — последовательное поле, которое последовательно соединено с якорем.Поле шунта дает
Этот тип двигателя является преимуществом постоянной скорости по сравнению с обычным параллельным двигателем. Поле серии дает ему преимущество
способность развивать большой крутящий момент, когда двигатель запускается под большой нагрузкой. Это не должно быть сюрпризом
что составной двигатель имеет характеристики как параллельного, так и последовательного двигателя.
2-6
Рисунок 2-5. — Двигатель постоянного тока с комбинированной обмоткой.
Когда шунтирующее поле подключено параллельно последовательному полю и якорю, это называется «длинным шунт », как показано на рисунке 2-5 (вид A).В противном случае его называют «коротким шунтом», как показано на рисунке 2-5 (см. Б).
ВИДЫ АРМАТУР
Как и генераторы постоянного тока, двигатели постоянного тока могут быть сконструированы с использованием одного из двух типов якоря. Краткий обзор Якоря с кольцом грамм и барабанной обмоткой необходимы, чтобы подчеркнуть сходство между генераторами постоянного тока и постоянным током. моторы.
АРМАТУРА ГРАММ-КОЛЬЦА
Арматура с кольцом Грамма состоит из намотки
изолированный провод вокруг кольца из мягкого железа (рис.2-6). К обмотке выполнено восемь равноотстоящих соединений. Каждый
из них подключен к коммутатору. Кисти касаются только верхнего и нижнего сегментов. Есть два
параллельные пути для прохождения тока — один вверх по левой стороне и один вверх по правой стороне. Эти пути пройдены
через верхнюю щетку обратно к плюсовому выводу аккумуляторной батареи.
Рисунок 2-6. — Арматура Gramme-ring.
2-7
Чтобы проверить направление вращения этого якоря, вы должны использовать правило правой руки для двигателей.Держите большой, указательный и средний пальцы под прямым углом. Направьте указательный палец в направлении поля
флюс; в данном случае слева направо. Теперь поверните запястье так, чтобы средний палец указывал в направлении
что ток течет в обмотке за пределами кольца. Обратите внимание, что ток течет на страницу (от
вы) в левой обмотке и вне страницы (к вам) в правой обмотке. Ваш большой палец теперь указывает
в направлении движения обмотки.
Якорь с кольцом Грамма редко используется в современных двигателях постоянного тока.
Обмотки на внутренней стороне кольца защищены от магнитного потока, из-за чего якорь этого типа не работает.
неэффективно. Арматура Gramme-ring обсуждается в первую очередь для того, чтобы помочь вам лучше понять барабанную перемотку.
арматура.
БАРАБАННАЯ АРМАТУРА
Барабанная арматура обычно используется в двигателях переменного тока. это
идентична барабанной обмотке, описанной в главе о генераторах постоянного тока.
Если бы якорь барабанный был
разрезанный пополам, вид с торца на разрезе будет напоминать рисунок на рисунке 2-7 (вид A), рисунок 2-7 (вид B) — это
вид сбоку на арматуру и полюсные наконечники. Обратите внимание, что длина каждого проводника расположена параллельно
грани полюсов. Следовательно, каждый провод якоря может сократить максимальный магнитный поток поля двигателя.
Такое расположение компенсирует неэффективность якоря с кольцом Грамма.
Рисунок 2-7. — Якорь барабанного типа.
Направление тока обозначено в каждом проводнике на рис. 2-7 (вид A), как если бы якорь
вращались в магнитном поле. Точки показывают, что ток течет к вам с левой стороны, а
крестики показывают, что ток течет от вас с правой стороны.
Полосы утеплителя
вставлены в пазы, чтобы удерживать обмотки на месте при вращении якоря.Они показаны в виде клиньев на рис. 2-7.
(вид A).
Q10. Почему арматура с кольцом Грамма не получила широкого распространения?
Q11. В чем недостаток
Якорь с кольцом Грамма преодолевается в барабанном якоре?
2-8
НАПРАВЛЕНИЕ ВРАЩЕНИЯ
Направление вращения двигателя постоянного тока зависит от направления магнитного поля и направления
ток в арматуре.Если либо направление поля, либо направление тока, протекающего через
якорь реверсируется, двигатель вращается в обратном направлении. Однако, если оба этих фактора поменять местами при
в то же время двигатель продолжит вращаться в том же направлении. На практике возбуждение поля
напряжение меняется на противоположное, чтобы изменить направление вращения двигателя.
Обычно двигатель настроен на выполнение определенного
работа, требующая фиксированного направления вращения.Однако бывают случаи, когда необходимо изменить
направление вращения, такое как приводной двигатель для орудийной башни или ракетной установки. Каждый из них должен уметь
двигаться в обоих направлениях. Помните, что соединения арматуры или поля необходимо поменять местами, но не
обе. В таких случаях правильные соединения выполняются реверсивным переключателем.
Q12. В DC
двигатель, который должен вращаться в обоих направлениях, как изменить направление?
СКОРОСТЬ ДВИГАТЕЛЯ
Двигатель, скорость которого можно регулировать, называется двигателем с регулируемой скоростью; Двигатели постоянного тока — это двигатели с регулируемой скоростью.Скорость двигателя постоянного тока изменяется путем изменения тока в поле или путем изменения тока в
арматура.
Когда ток поля уменьшается, поток поля уменьшается, и противодействующая ЭДС уменьшается. Это позволяет больше
ток якоря. Следовательно, мотор разгоняется. При увеличении тока поля поток поля равен
повысился. Разработана дополнительная противо-ЭДС, противодействующая току якоря. Затем ток якоря уменьшается,
и мотор тормозит.
Когда напряжение, подаваемое на якорь, уменьшается, ток якоря уменьшается, и двигатель снова
замедляет. Когда напряжение и ток якоря увеличиваются, двигатель ускоряется.
В шунте
двигателя, скорость обычно регулируется реостатом, подключенным последовательно с обмотками возбуждения
, как показано на
рисунок 2-8. Когда сопротивление реостата увеличивается, ток через обмотку возбуждения уменьшается.Уменьшенный поток мгновенно снижает противо-ЭДС. Затем двигатель ускоряется, и увеличение счетчика
ЭДС поддерживает постоянный ток якоря. Аналогичным образом уменьшение сопротивления реостата увеличивает
ток протекает через обмотки возбуждения и вызывает замедление двигателя.
Рисунок 2-8. — Контроль скорости двигателя.
2-9
В последовательном двигателе регулятор скорости реостата может быть подключен либо параллельно, либо последовательно с
обмотки якоря.В любом случае перемещение реостата в направлении, которое снижает напряжение на
Якорь снижает ток через якорь и замедляет двигатель. Перемещение реостата в направлении, которое
увеличивает напряжение и ток через якорь, увеличивает скорость двигателя.
Q13. Какое влияние на
скорость двигателя при увеличении тока возбуждения?
РЕАКЦИЯ АРМАТУРЫ
Вы помните, что тема реакции якоря была затронута в предыдущей главе, посвященной генераторам постоянного тока.Причины реакции якоря и способы компенсации ее влияния в основном одинаковы для постоянного тока.
двигатели как генераторы постоянного тока.
Рисунок 2-9 повторяет для вас искажающий эффект, который поле якоря
имеет поток между полюсными наконечниками. Обратите внимание, однако, что эффект сдвинул нейтральную плоскость назад,
против направления вращения. Это отличается от генератора постоянного тока, где нейтральная плоскость смещена вперед.
по направлению вращения.
Рисунок 2-9. — Реакция якоря.
Как и прежде, щетки необходимо переместить в новую нейтральную плоскость. Как показано на рисунке 2-9, сдвиг
против часовой стрелки. Опять же, правильное место достигается, когда от щеток нет искры.
Q14.
Реакция якоря в двигателе постоянного тока вызывает смещение нейтральной плоскости в каком направлении?
Компенсационный
обмотки и межполюсники, еще два «старых» предмета, отменяют реакцию якоря в двигателях постоянного тока.Перемещение кистей уменьшает
искрение, но это также делает поле менее эффективным. Отмена реакции якоря устраняет необходимость переключения
кисти в первую очередь.
Компенсирующие обмотки и промежуточные полюса в двигателях так же важны, как и в
генераторы. Компенсирующие обмотки относительно дороги; поэтому большинство больших двигателей постоянного тока зависят от межполюсных
исправить реакцию якоря. Компенсирующие обмотки в двигателях такие же, как и в генераторах.Интерполы,
однако немного отличаются. Разница в том, что в генераторе межполюсник имеет ту же полярность, что и
главный полюс ВПЕРЕД его по направлению вращения. В двигателе межполюсник имеет ту же полярность, что и основной
полюс ПОСЛЕ его.
2-10
NEETS Содержание
- Введение в материю, энергию, и постоянного тока
- Введение в переменный ток и трансформаторы
- Введение в защиту цепей, Контроль и измерение
- Введение в электрические проводники, проводку Методы и схемы чтения
- Общие сведения о генераторах и двигателях
- Введение в электронную эмиссию, трубки, и блоки питания
- Введение в твердотельные устройства и Блоки питания
- Введение в усилители
- Введение в генерацию и формирование волн Схемы
- Введение в распространение и передачу волн Линии и антенны
- Принципы СВЧ
- Принципы модуляции
- Введение в системы счисления и логические схемы
- Введение в микроэлектронику
- Принципы синхронизаторов, сервоприводов и гироскопов
- Знакомство с испытательным оборудованием
- Принципы радиочастотной связи
- Принципы работы радаров
- Справочник техника, Главный глоссарий
- Методы и практика испытаний
- Введение в цифровые компьютеры
- Магнитная запись
- Введение в волоконную оптику