
Частота вращения электродвигателя | Полезные статьи
Частота вращения электродвигателя напрямую влияет на его производительность и уровень энергопотребления. Поэтому регулирование частоты вращения электродвигателя является востребованной в промышленности функцией, которая стала доступной с появлением специальных силовых полупроводниковых приборов — тиристоров, а также транзисторов IGBT.
 Рисунок 1. Один из видов преобразователей частоты вращения электродвигателей На сегодняшний день различные способы управления асинхронными электромоторами широко применяются в промышленности, ведь изменяемая частота вращения электродвигателя позволяет не только экономить энергию, но и существенно усовершенствовать управление различными технологическими процессами.
Рисунок 1. Один из видов преобразователей частоты вращения электродвигателей На сегодняшний день различные способы управления асинхронными электромоторами широко применяются в промышленности, ведь изменяемая частота вращения электродвигателя позволяет не только экономить энергию, но и существенно усовершенствовать управление различными технологическими процессами.
Стоит отметить, что если требуется регулировка скорости, гораздо чаще используются двигатели постоянного тока.
Поэтому использовать преобразователь частоты электродвигателя в данном случае нет необходимости. Управление такого двигателя осуществляется регулированием напряжения, благодаря чему он отличается простотой эксплуатации. При этом двигатели постоянного тока отличаются высокой стоимостью, сложной конструкцией и не всегда подходящими для промышленной эксплуатации характеристиками.
С асинхронными двигателями все наоборот: они надежны, сравнительно недороги и имеют хорошие эксплуатационные характеристики. Но с ними можно использовать только гораздо более дорогостоящие и сложные регуляторы скорости вращения. Впрочем, с появлением биполярных транзисторов с изолированным затвором данная проблема стала гораздо менее острой, поэтому асинхронные двигатели с регулируемой частотой вращения также довольно широко применяются в промышленных масштабах.
Самостоятельное определение частоты вращения электродвигателя
Не зная частоты вращения электродвигателя, во многих случаях нет возможности эксплуатировать его. Если документация к мотору отсутствует, приходится думать, как определить частоту вращения электродвигателя самостоятельно. Сделать это можно, воспользовавшись пошаговой инструкцией:
- Современные асинхронные электродвигатели делятся на три группы, по количеству оборотов в минуту. Первая группа — двигатели с частотой до 1000 об/мин. Вторая группа — до 1500 оборотов. Третья группа — до 3000 оборотов в минуту.
- Чтобы определить частоту вращения электродвигателя, нужно выявить, к какой группе он относится. Для этого необходимо открыть его крышку и найти катушку обмотки.
- Далее нужно примерно определить размеры катушки по отношению к кольцу статора. Точные расчеты и замеры здесь не требуются.
- Если катушка по размеру способна закрыть собой примерно половину кольца статора, частота вращения электродвигателя составляет 3000 об/мин. Если катушка покрывает около трети самого кольца, то электродвигатель относится ко второй группе. Если размер катушки равен четверти кольца — число оборотов не превышает 1000.
Это только примерный подсчет, но даже такие данные уже помогут определить основные характеристики, возможности, а значит, и сферу применения исследуемого электродвигателя.
Скорость — вращение — асинхронный двигатель
Скорость — вращение — асинхронный двигатель
Cтраница 1
Скорость вращения асинхронных двигателей в нормальном режиме работы мало зависит от нагрузки на валу. Однако возможности асинхронных двигателей в отношении регулирования скорости весьма ограничены. Поэтому асинхронный двигатель с короткозамкнутым ротором в нормальном исполнении, как правило, находит применение в электроприводах механизмов, не требующих регулирования скорости. [1]
Скорость вращения асинхронного двигателя никогда не может достигнуть синхронной скорости ( поэтому и название его асинхронный), так как в этом случае магнитный поток статора был бы неподвижен относительно ротора и вращающий момент был бы равен нулю. [3]
Скорость вращения асинхронных двигателей зависит от механической нагрузки двигателя: чем больше он нагружен, тем больше вращение его ротора будет отставать от вращения магнитного поля. [5]
Скорость вращения асинхронного двигателя в известной мере зависит не только от частоты тока в сети, но и от нагрузки. В зависимости от мощности двигателя падение скорости вращения между холостым ходом н рабочей мощностью ( скольжение) составляет 1 — 5 % от номинальной скорости. При холостом ходе машина практически работает при синхронной скорости вращения. При перегрузке двигателя скорость падает на 10 — 15 %, а при превышении максимально допустимого момента двигателя скорость вращения последнего начинает значительно падать, и если двигатель не будет своевременно отключен от сети, может произойти серьезная авария. [6]
Скорость вращения асинхронных двигателей зависит от числа полюсов обмотки статора: чем больше полюсов имеет обмотка статора, тем меньше скорость вращения двигателя. Многоскоростные асинхронные двигатели отличаются от односкоростных тем, что их конструкция обеспечивает возможность изменения числа полюсов обмотки статора. [8]
Регулирование скорости вращения асинхронных двигателей переключением числа полюсов весьма экономично; однако такое регулирование является ступенчатым и поэтому не может обеспечить непрерывного управления, надобность в котором возникает в современных автоматизированных установках. [9]
Регулирование скорости вращения асинхронных двигателей изменением скольжения за счет активного сопротивления обмотки ротора может быть осуществлено лишь в двигателях с фазным ротором. [11]
Регулирование скорости вращения асинхронных двигателей посредством изменения первичного напряжения имеет второстепенное значение, так как не позволяет осуществлять регулирование в широких пределах и к тому же не является экономичным. [12]
Регулирование скорости вращения асинхронных двигателей производят несколькими способами. [13]
Нестабильность скорости вращения асинхронных двигателей во многом зависит от жесткости их механической характеристики. При жесткой механической х
Как определить мощность и частоту оборотов электродвигателя
Возникла необходимость узнать мощность или частоту оборотов вала и другие параметры электродвигателя, но после внимательного осмотра на его корпусе не нашлось таблички (шылдика) с его наименованием и техническими параметрами. Придется определять самому, для этого есть несколько способов и мы их рассмотрим ниже.
Чтоб осознать, как это работает, нам понадобится 2 величины: сила тока и напряжение. Сила тока — численность тока, которое проходит через поперечное сечение за некий отрезок времени, ее принято определять в амперах. Напряжение — значение, равная работе по перемещению заряда меж 2-мя точками цепи, ее принято определять в вольтах.
Для расчета мощности используется формула N = A/t, где:
N — мощность;
А — работа;
t — время.
Часто электродвигатель поступает с завода с уже указанными техническими параметрами. Но заявленная мощность не всегда соответствует фактической, а скорее всего она может значить лишь максимальную мощность электропотока.
Так что если на вашем электроинструменте указана, например, мощность в 500 ват, это совсем не значит что инструмент будит потреблять точно 500 ват.
Электродвигатели производят стандартной дискретной мощности, линейки типа 1.5, 2.2, 4 кВт.
Опытный электрик может легко отличить 1.5 от 2.2 кВт всего лишь взглянув на его габариты. Помимо этого он сможет определить количество оборотов двигателя по размеру статора, количеству пар полюсов и диаметра вала.Еще более опытным в этом деле окажется обмотчик, специалист который занимается перемоткой электродвигателей со 100%-ой уверенностью определит технические параметры вашего электродвигателя.
Если табличка с характеристиками двигателя потеряна для подсчета мощности двигателя нужно измерить силу тока на обмотках ротора и с помощью стандартной формулы найти потребляемую мощность электродвигателя.
Основные способы определения мощности двигателя
Определение мощности по току. Для этого подключаем двигатель в сеть и контролируем напряжение. Затем поочередно, в цепь каждой из обмоток статора включаем амперметр и замеряем потребляемый ток. После того как мы нашли суму потребляемых токов, полученное число необходимо умножить на фиксированное напряжение в результате получим число определяющее мощность электродвигателя в ваттах.
Определяем мощность по габаритам. Нужно измерить диаметр сердечника (с внутренней стороны) и его длину.
Дальше если знаем частоту сети нужно узнать синхронную частоту вращения вала.
Умножаем синхронную частоту вращения вала на диаметр сердечника (в сантиметрах) полученную цифру умножаем на 3.14 затем разделяем на частоту сети умноженную на 120. Полученное значение мощности будит в киловаттах.
Замер по счетчику. Способ считается самым простым. Для этого, для чистоты эксперимента, отключаем все нагрузки в доме. Дальше необходимо включить двигатель на определенное время (например 10 минут) На щетчике будит видно разницу в киловаттах по ней уже легко можно высчитать сколько киловаттах потребляет двигатель. Удобней всего будит воспользоваться портативным электросчетчиком который показывает потребление в киловаттах (ваттах) в режиме реального времени.
Для определения реального показателя мощности, которую выдает двигатель, необходимо найти скорость валового вращения, измеряемую в числе оборотов за секунду, тяговое усилие двигателя.
Частота вращения умножается последовательно на 6,28, показатель силы и радиус вала, который можно вычислить при помощи штангенциркуля. Найденное значение мощности выражается в ваттах.
Определяем рабочее количество оборотов двигателя.
Самый быстрый способ — посчитать количество катушек (катушечных групп) Определяем мощность по расчетным таблицам. С помощью штангенциркуля замеряем диаметр вала, длину мотора (без выступающего вала) и расстояние до оси.Замеряем вылет вала и его выступающую часть, диаметр фланца если он есть, а также расстояние крепежных отверстий. По этим данным с помощью сводной таблицы можно легко определить мощность двигателя и другие характеристики 1,1 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 71 | 80 | 80 |
| Диаметр вала d1, мм | 19 | 22 | 22 |
| Крепление лап по ширине b10, мм | 112 | 125 | 125 |
| Крепление лап по длине L10, мм | 90 | 100 | 100 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 165 | 165 |
| Замок фланца d25, мм | 130 | 130 | 130 |
1,5 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 80 | 80 | 90 |
| Диаметр вала d1, мм | 22 | 22 | 24 |
| Крепление лап по ширине b10, мм | 125 | 125 | 140 |
| Крепление лап по длине L10, мм | 100 | 100 | 125 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 165 | 215 |
| Замок фланца d25, мм | 130 | 130 | 180 |
2,2 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 80 | 90 | 100 |
| Диаметр вала d1, мм | 22 | 24 | 28 |
| Крепление лап по ширине b10, мм | 125 | 140 | 160 |
| Крепление лап по длине L10, мм | 100 | 125 | 140 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 215 | 215 |
| Замок фланца d25, мм | 130 | 180 | 180 |
4 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 100 | 100 | 112 |
| Диаметр вала d1, мм | 28 | 28 | 32 |
| Крепление лап по ширине b10, мм | 160 | 160 | 190 |
| Крепление лап по длине L10, мм | 112 | 140 | 140 |
| Крепление фланца по центрам отверстий d20, мм | 215 | 215 | 265 |
| Замок фланца d25, мм | 180 | 180 | 230 |
Мощность и вращающий момент электродвигателя. Что это такое?
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.
Вращающий момент (T) — это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы — или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.
P1 (кВт) Входная электрическая мощность насосов — это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя — это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
Как узнать обороты эл двигателя. Как определить обороты электродвигателя
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе статор мог быть перемотан. Определить номинальную частоту вращения электродвигателя можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Определение скорости при помощи графического рисунка
Для определения скорости вращения двигателя существует таблица графических рисунков круглой формы. Суть в том, что приклеенный на торец вала бумажный кружок с заданным узором при вращении образует определенный графический эффект при освещении источником света с частотой в 50Гц. Таким образом, перебрав несколько рисунков и сравнив результат с табличными данными можно определить номинальную скорость вращения двигателя.Типовые характеристики по монтажным размерам
Промышленные двигатели производства СССР, как и большинство современных, производились по государственным стандартам и имеют установленную таблицу соответствия. Исходя из этого, можно замерить высоту центра вала относительно плоскости посадки, его передний и задний диаметры, а также размеры крепежных отверстий. В большинстве случаев этих данных будет достаточно, чтобы найти в таблице нужный двигатель и не только определить частоту вращения, но и установить его электрическую и полезную мощность.При помощи механического тахометра
Очень часто нужно определить не только номинальную характеристику электрической машины, но и знать точное количество оборотов в данный момент. Это делается при диагностике электрических двигателей и для определения точного показателя коэффициента скольжения .В электромеханических лабораториях и на производстве используются специальные приборы — тахометры. Если получить доступ к такому оборудованию, измерить частоту вращения асинхронного двигателя можно за несколько секунд. Тахометр имеет стрелочный или цифровой циферблат и измерительную штангу, на конце которой имеется отверстие с шариком. Если смазать центровочное отверстие на валу вязким воском и плотно приставить измерительную штангу к нему, на циферблате отобразится точное количество оборотов в минуту.
При помощи детектора стробоскопического эффекта
Если двигатель находится в процессе эксплуатации, можно избежать необходимости отстыковывать его от исполнительного механизма и снимать задний кожух только для того, чтобы добраться до центровочного отверстия. Точное количество оборотов в этих случаях можно также измерить при помощи стробоскопического детектора. Для этого на вал двигателя наносят продольную риску белого цвета и устанавливают светоулавливатель прибора напротив нее.При включении двигателя в работу прибор определит точное количество оборотов в минуту по частоте появления белого пятна. Этот метод применяется, как правило, при диагностическом обследовании мощных электрических машин и зависимости частоты вращения от приложенной нагрузки.
Использование кулера от персонального компьютера
Для проведения измерений частоты вращения двигателя можно использовать весьма оригинальный метод. В нем применяется лопастной вентилятор охлаждения от персонального компьютера. Пропеллер крепится к торцу вала при помощи двустороннего скотча, а рама вентилятора удерживается вручную. Провод вентилятора подключается к любому из разъемов материнской платы, на котором можно провести измерения, при этом само питание на кулер подавать не нужно. Точный показатель частоты вращения можно получить через утилиту BIOS или диагностическую утилиту, работающую под управлением операционной системы.Иногда, купив электродвигатель для автомобиля с рук, можно обнаружить, что в коробке из-под него нет абсолютно никакой документации. Тогда придется определять количество допустимых для него оборотов самостоятельно.
Спонсор размещения P&G Статьи по теме «Как определить обороты электродвигателя» Как регулировать скорость вращения Как прогреть машину быстро Как подключить однофазный электродвигатель
Инструкция
Все асинхронные электродвигатели можно разделить на три группы по количеству обращения ротора в минуту. Первая — 1000 оборотов. На самом деле эта цифра немного преувеличена, поскольку двигатель является асинхронным. В минуту его ротор совершает чуть меньшее количество оборотов (950-980), а для удобства значение было решено округлить. В двигателях второй группы количество обращений ротора составляет 1500 в минуту (на деле 1420-1480). В третьей группе ротор оборачивается вокруг себя 3000 раз в минуту (в реальности 2900-2980). Чтобы определить, к какой группе относится ваш электродвигатель, нужно сначала открыть одну его крышку. Найдите катушку обмотки, которая может состоять как из одной детали, так и из трех- четырех. Таких катушек в двигателе должно быть несколько, вам понадобится одна из них, которую легче всего рассмотреть. Катушки связаны между собой необходимыми деталями, которые могут помешать рассмотреть их, и которые ни в коем случае нельзя отсоединять друг от друга. Приглядитесь к выбранной и попробуйте определить ее размер относительно кольца статора. Это расстояние не обязательно определять с точностью до миллиметра, вполне подойдут приблизительные расчеты. В том случае, если размер катушки покрывает собой одну вторую кольца статора, то скорость обращения ротора будет равна 3000 оборотов в минуту. Если она закрывает собой треть кольца, то это двигатель второй группы, ротор которого будет вращаться со скоростью 1500 оборотов в минуту. Если ее размер равен одной четвертой по отношению к кольцу, то вращение будет происходить со скоростью 1000 оборотов в минуту. Нужно помнить, что подобные цифры лишь приблизительно отражают реальную картину вращения. Как просто
Другие новости по теме:
В любительской и ремонтной практике возникает необходимость использования трехфазных электродвигателей для силового привода. Для их питания вовсе не обязательно иметь трехфазную сеть. Самый эффективный способ запуска асинхронного электродвигателя — подключить его третью обмотку через фазосдвигающий
Мощность электродвигателя, как правило, указывается в технической документации к нему или в специальной табличке на корпусе. Если так ее найти невозможно, рассчитайте ее самостоятельно. Это можно сделать, измерив ток в обмотках и напряжение на источнике. Также можно определить его мощность по
Устойчивая работа двигателя на холостом ходу очень важна. При этом обороты не должны быть высокими и «плавать». От этого зависит расход топлива, нагрузка на детали автомобиля и многое другое. Поэтому каждый автомобилист должен знать, как отрегулировать обороты холостого хода своего «железного
Мощность автомобиля — один из базовых показателей, на которые обращают внимание при покупке. А со временем некоторые автолюбители просто спят и видят, как бы увеличить мощность машины. А сделать это можно, повысив обороты. Спонсор размещения P&G Статьи по теме «Как повысить обороты двигателя» Как
Если вы решили самостоятельно сделать электродвигатель, вам понадобится точный расчет характеристик его работы. Ведь от этого будет зависеть, сможет ли он выполнять свои функции или нет. Спонсор размещения P&G Статьи по теме «Как рассчитать электродвигатель» Как сделать индукционный нагреватель Как
Электрические двигатели допускают регулировку числа оборотов в значительных пределах. Способ регулировки этого параметра зависит от типа электродвигателя. Некоторые двигатели допускают регулировку различными способами и их сочетаниями. Спонсор размещения P&G Статьи по теме «Как снизить обороты
В последние годы наблюдается тенденция распространения скутеров среди подростков. Если раньше они были в диковинку, то сейчас есть, наверно, у каждого школьника. У скутера много достоинств и почти нет недостатков. Во-первых, он достаточно легок в управлении. Во-вторых, он не такой большой как
Обычно на электрическом двигателе прикреплена бирка, на которой выбиты паспортные данные, схема соединения обмоток, напряжение, на котором работает двигатель, количеств
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
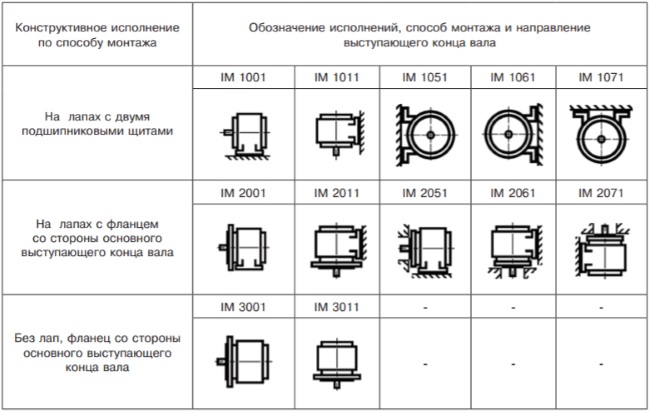
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
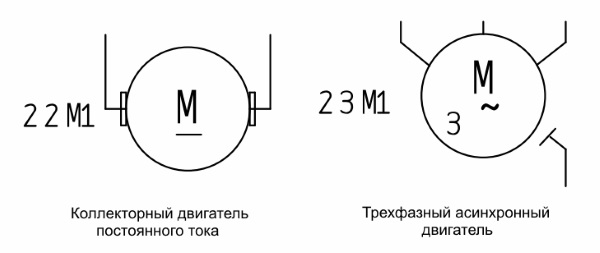
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования. Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора. Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
 Базовые принципы выбора электродвигателя
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения. Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе. Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель. При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD). При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы. Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В. Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять. Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости. По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ. CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
 Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах. Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха. Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель. Производительность такого устройства не связана с системой управления электропривода. В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего момента
При выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели. Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно. Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
Число полюсов, N | Скорость, об/мин | Крутящий момент, |
2 | 3600 | 1,46 |
4 | 1800 | 2,92 |
6 | 1200 | 4,38 |
8 | 900 | 5,84 |
10 | 720 | 7,29 |
12 | 600 | 8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Вконтакте
Google+