
Регулировка оборотов асинхронного двигателя: способы и схемы
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
 Достоинствами данного метода являются:
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.

Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.

Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
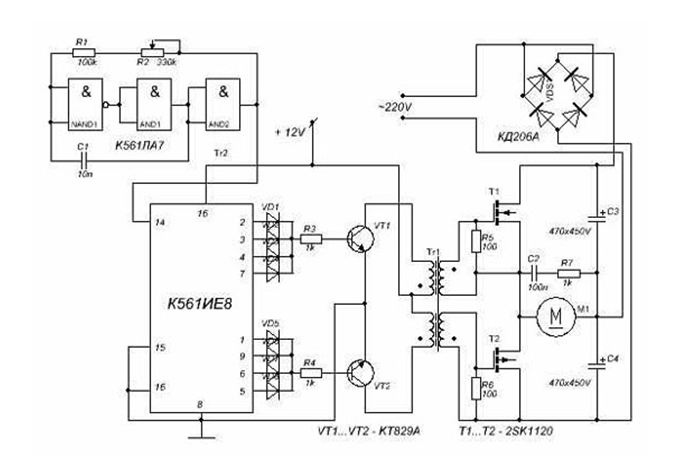
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
Регулировка оборотов асинхронного двигателя своими руками (схема, видео)
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
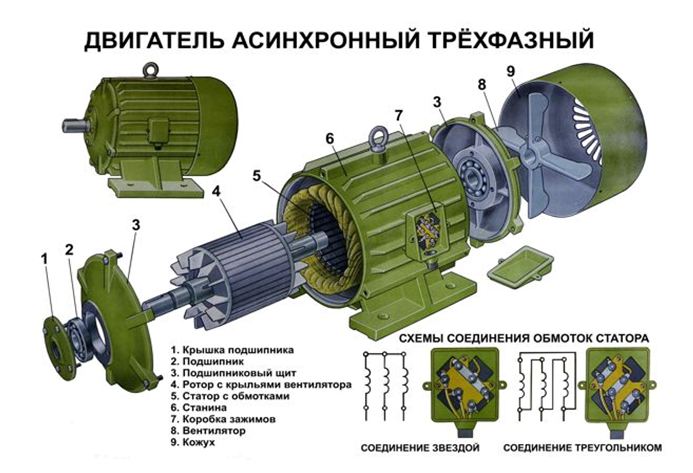
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
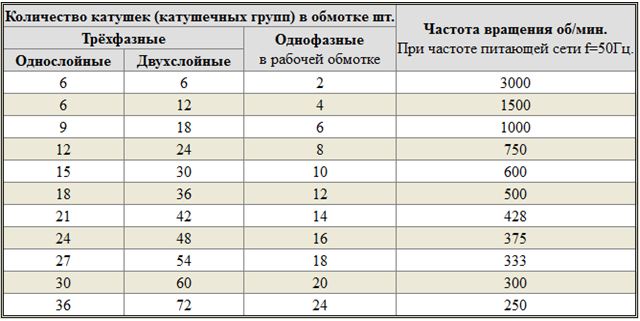
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Наши рекомендации:
Если вы ищете хороший интернет-магазин Электрики, советуем посетить магазин 220 ВОЛЬТ. Если же вы не хотите сами заморачиваться с Электрикой, мы рекомендуем поискать профессионального мастера на сайте Ремонтник.ру
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Регулятор скорости вращения асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Регулятор скорости вращения асинхронного электродвигателя.
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц.
Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Вопросы, как всегда в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Регулирование скорости асинхронного двигателя
 Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна

При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.

Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания

При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Схема регулирования оборотов асинхронного двигателя 220в. Как уменьшить обороты электродвигателя
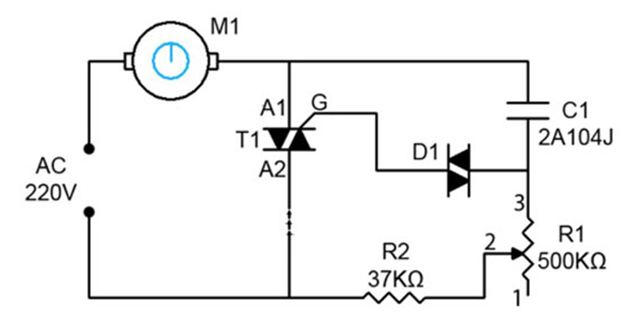
Схема регулятора, с помощью которой осуществляется изменение частоту оборотов вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока на напряжение 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключен в диагональ диодного моста VD3, на другую же поступает сетевое напряжение переменного тока 220 вольт. Кроме того, этот тиристор осуществляет контроль достаточно широкими импульсами, благодаря чему, непродолжительные обрывы цепи, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Управляет первым тиристором транзистор VT1, подключенный по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь уже на втором тиристоре появится длительный управляющий импульс. И уже с него напряжение, которое фактически и влияет на величину оборотов, поступает на двигатель.
Частоту оборотов вращения электродвигателя подстраивают переменным сопротивлением R1. Так как в цепь второго тиристора подсоединена индуктивная нагрузка, то возможно спонтанное открывание тиристора, даже в момент отсутствии управляющего сигнала. Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Во время настройки схемы регулятора оборотов двигателя желательно использовать , которым можно измерить частоту вращения электродвигателя либо обычный стрелочный вольтметр для переменного тока, который подключают параллельно двигателю.
С помощью подбора сопротивления R3 задают диапазон изменения напряжения от 90 до 220 вольт. Если при минимальных оборотах двигатель работает некорректно, то требуется уменьшить номинал резистора R2.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется . В результате его нагревания уменьшается его сопротивление, и поэтому на выходе операционного усилителя, наоборот напряжение увеличивается и через полевой транзистор управляет оборотами вентилятора.
Переменным сопротивлением P1 — можно задать наименьшую скорость вращения вентилятора при наименьшей температуре, а переменным сопротивлением P2 регулируют наибольшую скорость вращения при максимальной температуре.
В нормальных условиях настраиваем резистором P1 минимальные обороты двигателя. Затем нагревают датчик и сопротивлением P2 адают нужную частоту вращения вентилятора.
Схема управляет скоростью вентилятора в зависимости от показаний температур, с помощью обычного с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней присутствует только три радиокомпонента: регулируемый стабилизатор напряжения LM317T и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — термистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки рисунок печатной платы привожу ниже.
В целях экономии, можно оснастить регулятором оборотов типовую болгарку. Такой регулятор для шлифования корпусов различной радиоэлектронной аппаратуры является незаменимым инструментом в арсенале радиолюбителя
Все современные дрели выпускают с встроенными в них регуляторами числа оборотов двигателя, но наверняка, в арсенале каждого радиолюбителя имеется старая советская дрель, у которых изменение числа оборотов не было задумано, что, резко снижает эксплуатационные характеристики.
Регулировать скорость вращения асинхронного безколлекторного двигателя можно с помощью настройки частоты питающего переменного напряжения. Данная схема позволяет регулировать скорость вращения в довольно широком диапазоне — от 1000 до 4000 оборотов в минуту.
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины.
Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
- Простейший вариант
- В цепи якоря
- Для низкого напряжения
- От сети
- Коллекторные машины
- Двухфазный двигатель
- Обычные асинхронники
- Измерения
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печа
Устройство для регулирования скорости вращения однофазного конденсаторного асинхронного двигателя — Меандр — занимательная электроника
В статье даётся описание простого устройства для пуска, регулирования скорости вращения, экстренного торможения и реверсирования однофазного асинхронного конденсаторного двигателя с короткозамкнутым ротором.
Предлагаемое техническое решение предназначено для управления работой конденсаторного двигателя (ОКД) с короткозамкнутым ротором, имеющих две одинаковые обмотки на статоре и рабочий фазосдвигающий конденсатор, и является усовершенствованием известного устройства, приведенного в [1].
Устройство [1] содержит цепочку, состоящую из двух элементов, включённых параллельно, — диода и переменного резистора. Один вывод цепочки присоединён к одному зажиму сети, а другой — к зажиму фазосдвигающего конденсатора, соединённому с одним из выводов первой обмотки ОКД, другой вывод которой присоединён к другому выводу сети и ко второму выводу второй обмотки ОКД, первый вывод которой соединён с другим выводом конденсатора. Режим регулирования скорости вращения ОКД обеспечивался переменным резистором путём создания неподвижного магнитного поля регулируемой величины.
Однако известное устройство не обеспечивает экстренное торможение ОКД, а также его экстренное реверсирование и, соответственно, работу в третьем квадранте механических характеристик двигателя.
Поэтому целью данной разработки является расширение функциональных возможностей известного устройства. Поставленная цель достигается тем, что устройство для управления однофазным конденсаторным асинхронным двигателем снабжено однополюсным переключателем на три положения с фиксацией ручки управления в среднем и крайних положениях.
Работа устройства
На рисунке показана принципиальная электрическая схема предлагаемого устройства для управления однофазным конденсаторным асинхронным двигателем.
Устройство содержит однополюсный переключатель SA1 на три положения, с помощью которого можно выбирать направление вращения двигателя М и отключать его от сети, а также цепочку, состоящую из двух элементов, включённых параллельно — диода VD1 и переменного резистора R1.
При замкнутых контактах 1-2 переключателя SA1 обмотка Г1 выполняет функцию главной, а обмотка Г2, включённая через конденсатор С1, выполняет функцию вспомогательной, что обеспечивает одно направление вращения двигателя М. При замкнутых контактах 1-3 переключателя SA1 обмотка Г2 выполняет функцию главной, а обмотка Г1, включённая через конденсатор С1, выполняет функцию вспомогательной, что обеспечивает другое направление вращения двигателя М. Цепочка, состоящая из параллельно соединённых диода VD1 и переменного резистора R1, представляет собой управляющее звено, которое обеспечивает регулирование скорости вращения ОКД путём изменения величины резистора R1.
В исходном предпусковом положении ОКД подвижной контакт 1 переключателя SA1 находится в среднем нейтральном положении и обмотка двигателя М током не обтекается, и двигатель неподвижен. При этом резистор R1 должен быть выведен (R1=0). Для включения ОКД, например, с левым направлением вращения переключатель 8А1 переводят в положение, при котором замкнуты его контакты 1-2. В этом случае обмотка Г1 ОКД обтекается переменным током сети по цепи: вывод ХР1 сети, выведенный резистор R1, замкнутые контакты 1-2 переключателя SA1, главная обмотка Г1 двигателя, вывод ХР2 сети. Одновременно по этой же цепи через конденсатор С1 получает питание вспомогательная обмотка Г2 двигателя. Двигатель М запускается и работает с левым направлением вращения на естественной жёсткой механической характеристике.
Для регулирования скорости вращения ОКД вводят резистор R1, в результате, помимо вращающегося магнитного поля, создаётся ещё дополнительное неподвижное магнитное поле (благодаря наличию диода VD1), что приводит к снижению скорости вращения ОКД, т.е. он переходит на искусственную более мягкую механическую характеристику. Изменяя величину резистора R1, можно получать искусственные характеристики разной жёсткости и, соответственно, разные скорости вращения ОКД. Вместо резистора R1 можно использовать тиристор или транзистор.
Для осуществления режима экстренного торможения ОКД с целью его остановки или экстренного реверсирования при левом направлении вращения переключатель SA1 переводят в положение, при котором будут замкнуты его контакты 1-3. В этом случае напрямую к сети через управляющее звено присоединяется обмотка Г2 двигателя ОКД, т.е. она выполняет функцию главной обмотки, а обмотка П двигателя присоединяется к сети через конденсатор С1, т.е. она выполняет функцию вспомогательной обмотки. В результате магнитное поле ОКД изменяет своё вращение на противоположное при прежнем направлении вращения ротора, т.е. осуществляется экстренное торможение противовключением, что приводит к быстрой остановке ОКД. После остановки двигателя переключатель SA1 переводят в среднее нейтральное положение, отключая, тем самым, двигатель от питающей сети 220 В/50 Гц, в противном случае произойдёт его реверсирование, т.е. ОКД перейдёт из тормозного в основной двигательный режим с противоположным направлением вращения ротора, работая в третьем квадранте механических характеристик.
Таким образом, введение дополнительного элемента в устройство [1], изменение взаимосвязей между элементами устройства, обеспечивает работу ОКД не только в первом квадранте, но и во втором, и в третьем, т.е. в режимах экстренного торможения и остановки двигателя, а также быстрого его реверсирования, что существенно расширяет функциональные возможности известного устройства.
Детали
Переключатель SA1 любой однополюсный на три положения с нейтральным положением (фиксацией) подвижного контакта в среднем и крайних положениях, подходящий по току и напряжению, для конкретного электродвигателя, например, типов ВТ3, ТП1-2, П2Т-13 на напряжение коммутации ~220 В для электродвигателей мощностью до 600 Вт включительно.
Переменный резистор R1 проволочный типа РСП-1, РСП-2 выбирают по току двигателя, сопротивление которого определяется необходимым диапазоном регулирования скорости вращения ОКД. Его номинал подбирают при наладке.
Силовой диод У01 должен быть рассчитан на ток двигателя, так, например, для двигателей мощностью до 0,6 кВт в качестве диодов можно использовать диоды типов КД202К, М, Р на 3 А и напряжения 400…600 В соответственно, или КД227Ж на 5 А/800 В, или 2Д203Г, Д на 10 А/700 В, а также диоды типа B10-10-В10-14 на ток 10 А и напряжение от 700 В и выше.
Номинал рабочего конденсатор С1 (в мкФ) подбирают из расчёта 66Рном (мкФ), где Рном ~ номинальная мощность электродвигателя в кВт (примерно 7 мкФ на 100 Вт мощности), типа К73-17, МБГО-2, КБГ-МП, БГТ или МБГЧ на напряжение не ниже 400 В.
Литература
- Патент Швейцарии № 462932, кл. 21с, 57/30 (Н 02р, 7/40), опубл. 1 5.11.68 — Управление однофазным асинхронным двигателем.
Автор: Константин Коломойцев, г. Ивано-Франковск