
Система управления асинхронным тиристорным электроприводом
1. Постановка задачи.
Системы «Тиристорный преобразователь напряжения — асинхронный двигатель» («ТПН-АД») широко используются при построении устройств плавного пуска АД. Существующие устройства плавного пуска, как правило, обеспечивают формирование заданной диаграммы напряжения, ограничение тока или электромагнитного момента [1] двигателя.
При выполнении научно-исследовательской работы, проводимой на кафедре «Электропривод и автоматизация промышленных установок» УГТУ-УПИ, возникла необходимость анализа свойств системы ТПН-АД, имеющей в своём составе контур электромагнитного момента.
В работе рассматриваются вопросы построения системы автоматического регулирования (САР) электромагнитного момента асинхронного двигателя без датчика на его валу, питаемого от ТПН.
2. Описание решения.
Для реализации САР электромагнитного момента двигателя на базе системы ТПН-АД требуется наличие сигнала обратной связи по моменту. Установка датчика момента на валу двигателя, как правило, невозможна из-за повышенной сложности его конструкции. Поэтому возникает задача косвенной оценки момента АД на основе измерения электрических переменных двигателя (напряжение, ток).
Установка датчика момента на валу двигателя, как правило, невозможна из-за повышенной сложности его конструкции. Поэтому возникает задача косвенной оценки момента АД на основе измерения электрических переменных двигателя (напряжение, ток).
Оценка мгновенного значения электромагнитного момента АД может быть получена при использовании следующего выражения:
где т — мгновенное значение электромагнитного момента двигателя; k = 1/ ωs — масштабный коэффициент, определяемый как величина, обратная угловой частоте напряжения на статоре ωs; Ps— активная мощность, потребляемая двигателем, которая может быть определена по выражению
где usa, usb, usc, isa, isb, isc— мгновенные значения напряжений и токов фаз А, В и С статора соответственно; ∆PS — мощность потерь в меди статора, вычисляемая по формуле
где Rs— активное сопротивление фазы обмотки статора.
Структура САР электромагнитного момента приведена на рис. 1. На рис. 1 изображены следующие элементы: РМ — регулятор момента интегрального типа; ФБ — функциональный блок, необходимый по условиям линеаризации и выполняющий операцию извлечения квадратного корня; СИФУ -система импульсно-фазового управления; ВМ — вычислитель момента.
Рис 1. Структура САР электромагнитного момента АД
Описанная система выполнена в виде стенда [2], структура которого показана на рис. 2. Стенд состоит из короткозамкнутого асинхронного двигателя, тиристорного преобразователя напряжения, датчиков мгновенных значений тока is(ДТ) и напряжения us (ДН) и персонального компьютера (ПК), оснащенного платой сбора данных Nl PCI-6221 с системой LabVIEW.
Рис. 2. Структура исследовательского стенда
При практической реализации САР момента нет необходимости в выдаче управляющего преобразователем сигнала на выбранном такте работы АЦП (т.е. каждые 0,0001 с) поэтому вместо выражений (2) и (3) использованы следующие алгоритмы:
расчёт которых проводится на периоде сети, равном 0,02 с.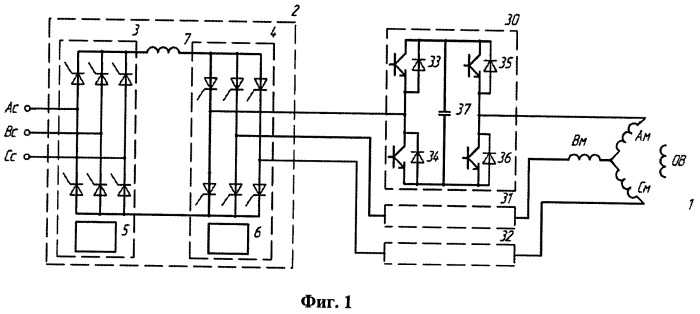 Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Особенностью ПО стенда является то, что часть программы, отвечающая за обработку сигналов, выполнена в виде функций динамически подключаемой библиотеки (DLL), созданной в системе программирования Delphi. В функциях библиотеки реализованы следующие задачи: определение электромагнитного момента двигателя по выражениям (1), (4) и (5), расчет регулятора момента и функционального блока.
Средствами LabVIEW выполнен опрос датчиков, выдача управляющих воздействий, отображение временных диаграмм всех сигналов (от датчиков и вычисленных программой) и формирование заданного значения момента двигателя. Код программы системы управления электроприводом показан на рис. 3.
Рис. 3. Программа системы управления, реализованная в LabVIEW
Информация от датчиков тока и напряжения передается в узел вызова основной функции библиотеки в виде указателей на массивы, содержащие значения соответствующих сигналов, при этом рабочая частота АЦП и размер буферов выбраны таким образом, что массивы содержат значения сигналов на одном периоде сети (0,02 с). На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
Рис. 4. Параметры узла вызова основной функции библиотеки
Функции библиотеки рассчитываются на частоте 50 Гц, сигналы датчиков тока и напряжения оцифровываются на частоте 10 кГц.
Диаграммы пуска электропривода с контуром электромагнитного момента представлены на рис. 5, 6.
Рис. 5. Пуск привода с контуром момента на холостом ходу: 1 — скорость, 2 — электромагнитный момент АД
Рис. 6. Пуск привода с контуром момента при моменте сопротивления на валу Мс = 0,4 Мм: 1 — скорость, 2 — электромагнитный момент АД
Из приведённых диаграмм видно, что темп запуска привода сильно зависит от момента сопротивления на валу двигателя, а поддержание электромагнитного момента двигателя на заданном уровне обеспечивает плавный и безударный пуск двигателя, не гарантируя при этом постоянства темпа его разгона.
Список литературы:
1. Chouffier J., Cornilleau H., Duclos P. Control method for a start-up control unit and an apparatus to make use of this method // United States patent № 5859514, 01.12.1999.
2. Зюзев А. М., Нестеров К.Е. Стенд для исследования системы управления асинхронным тиристорным электроприводом на основе программно-аппаратных средств Natonal Instruments // Материалы пятой международной НПК «Образовательные, научные и инженерные технологийй в среде LabVIEW и технологии National Instruments». Москва: РУДН, 2006. С. 395-399.
ТИРИСТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ — МегаЛекции
Основными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления.
Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока.
Тиристорный электропривод переменного тока.Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае с их помощью можно регулировать амплитуду (фазное регулирование) или частоту (частотное регулирование) синусоидального напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя (14.35). Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (рис. 14.25) регулировать его частоту вращения. На рис. 16.9 приведена схема
 Такой режим называется естественной коммутацией.
Такой режим называется естественной коммутацией.Искусственной коммутацией называется выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить тиристорное управление в цепи ротора асинхронного двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий цепь выпрямленного тока через резистор r1имеет узел искусственной коммутации. Узел искусственной коммутации содержит вспомогательный тиристор Tвс, резистор г2и конденсатор С.
Пусть первоначально рабочий тиристор Т открыт, а вспомогательный Твсзакрыт. В это время конденсатор С заряжается через резистор г2 так, как показано на рис. 16.10. Подадим теперь на управляющий электрод вспомогательного тиристора Твсотпирающий сигнал из устройства управления. Вспомогательный тиристор включится, и конденсатор начнет разряжаться через него и рабочий тиристор. Так как при этом разрядный ток конденсатора направлен навстречу прямому току рабочего тиристора, то последний выключается. После этого конденсатор перезаряжается через резистор r
Так как при этом разрядный ток конденсатора направлен навстречу прямому току рабочего тиристора, то последний выключается. После этого конденсатор перезаряжается через резистор r
Чтобы вновь включить рабочий тиристор, на его управляющий электрод надо подать сигнал из устройства управления. При этом конденсатор своим разрядным током выключает вспомогательный тиристор, а сам конденсатор перезаряжается, возвращаясь к состоянию, показанному на рисунке.
Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора.
Эквивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.
Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора.
Рассмотрим простейшую схему однофазного автономного инвертора (рис. 16.11), в которой источник постоянного напряжения Е соединен со средней точкой первичной обмотки трансформатора. Когда тиристор T1 включается сигналом блока управления, а тиристор Т2закрыт, то источник постоянного напряжения Е подключается к левой половине первичной обмотки трансформатора. Ток этой части •первичной обмотки возбуждает магнитный поток в магнитопроводе трансформатора. При этом во вторичной обмотке трансформатора индуктируется ЭДС, а конденсатор С заряжается, как показано на рисунке.
Если управляющий сигнал включает тиристор Т2, то перезарядка конденсатора С закрывает тиристор T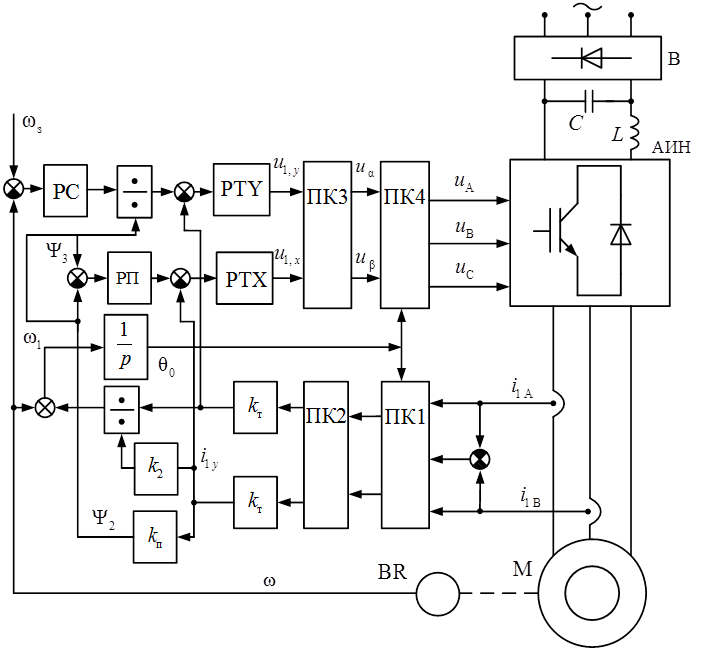 В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке ω2. Частота переменного напряжения, получаемого от инвертора, определяется частотой генератора управляющих сигналов, включающих поочередно тиристоры.
В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке ω2. Частота переменного напряжения, получаемого от инвертора, определяется частотой генератора управляющих сигналов, включающих поочередно тиристоры.
Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18).
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения Е используется выпрямленное напряжение сети переменного тока. Если для этой цели, так же как и для инвертирования, использовать тиристоры, то выпрямленное напряжение можно регулировать в широких пределах (см. рис. 10.17). Это дает дополнительные возможности для управления асинхронным двигателем.
Устройства, сочетающие в себе тиристорные выпрямители и тиристорные инверторы, принято называть шириапорными преобразователями. В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель.
В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель.
Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше.
Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока.
Одна из простейших схем включения двигателя постоянного тока в трехфазную цепь переменного тока приведена на рис. 16.12. Управляющее устройство синхронно включает тиристоры в порядке чередования фаз в положительные полупериоды фазных напряжений (рис. 10.17). В отрицательные полупериоды фазных напряжений происходит естественная коммутация, и тиристоры соответствующих фаз закрываются.
Среднее значение выпрямленного напряжения трех фаз равно напряжению на якоре двигателя постоянного тока (10.10):
где α — угол запаздывания включения тиристоров.
Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2).
Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока.
Воспользуйтесь поиском по сайту:
Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя
Боихонов Заилобиддин Уразали оглы1, Узаков Рахмонжон1
1Андижанский машиностроительный институт
Аннотация
В основном в этой статье тиристорно-управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Ключевые слова: асинхронные электродвигатели постоянного тока, магнитный поток, напряжение, реостат, тиристор
Библиографическая ссылка на статью:
Боихонов З.У.о., Узаков Р. Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя // Современные научные исследования и инновации. 2020. № 5 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/05/92669 (дата обращения: 14.09.2022).
Основной задачей современного производства является обеспечение роста научно-технического прогресса. Основным условием его выполнения непрерывное усовершенствование технологий, систем и средств управления технологического оборудования и технологического процесса.
Известно, в наши дни микроэлектроника являясь основным фактором научно-технического роста, гарантирует экономического подъёма общества.
В наши дни все существующие направления технического развития в текстильной и легкой промышленности, основанные на применении современных микропроцессоров и средств автоматики направлены на улучшение эффективности труда и качества продукции.
Необходимо подчеркнуть, что оборудование агрегатов машин и механизмов, входящих в состав производственной системы текстильных и прядильных фабрик современными средствами управления и регулирования полностью отвечает современным требованиям.
Для этой цели вместо двигателя постоянного тока устанавливается простой по конструкции, дешевый по себестоимости, расход дефицитных металлов 1,5 ÷ 2 раза меньше (в сравнении с двигателем постоянного тока), с простой системой управления асинхронный электродвигатель переменного тока, работающий надёжно и достаточно удовлетворяющий рабочих характеристик. Асинхронные электродвигатели широко применяются во многих отраслях производства. Скорость вращения асинхронного двигателя регулируется просто, управляется индукционным реостатом новой конструкции.
По приведенной формуле асинхронного двигателя с фазным ротором его механическая характеристика выражается в различных значениях.
Здесь общее сопротивление находится по следующему выражению
Тиристорно управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Скорость вращения асинхронного двигателя регулируется простым индукционным реостатом новой конструкции.
Для изменения скорости вращения двигателя изменяется образуемый магнитный поток в намагничивающей обмотке, т.е. появляется магнитный поток, связанный подаваемой силой тока на эту обмотку.
Этот магнитный поток, по направлению противоположен магнитному потоку, создаваемому обмоткой высокой мощности и алгебраически вычитается. В результате связанный значению направленного магнитного потока активное и реактивное сопротивления индукционного реостата. Это изменение в свою очередь приводит к изменению скорости вращения двигателя. Если коэффициент скольжения равняется S=1, то количество электрических параметров энергии, потребляемой индукционным реостатом равняется нулю. Изменением активно-индуктивного сопротивления индукционного реостата и сохранением некоторого сопротивления производится изменением значения напряжения, подаваемого на обмотку статора и увеличения (или уменьшения) количества конденсаторов.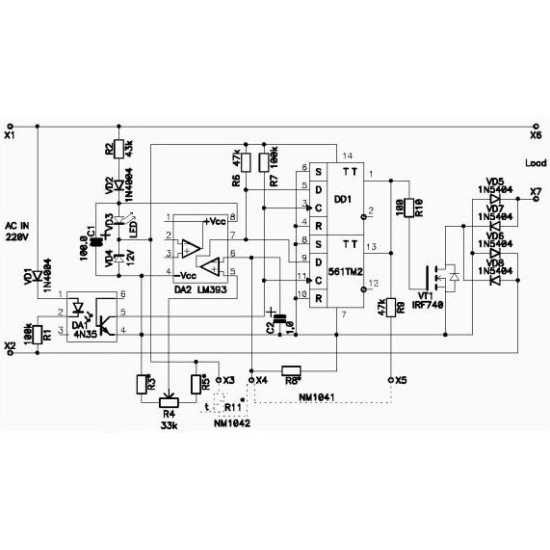
Кроме этого принцип работы электропривода с асинхронным двигателем и с индукционным реостатом основан на количестве вращения и производится за счёт изменения сопротивления индукционного реостата. В результате ограничения тока ротора приводит к изменению скорости вращения двигателя. Регулирование скорости электропривода дает возможность повышения производительность шлихтовальной машины.
В частотно-управляемом асинхронном электроприводе на основании изменение частоты переменного тока на обмотке статора регулируется скорость вращения электродвигателя. В конце концов составляется система управления электродвигателем, приводящий энергосбережению.
Сведения, полученные результатами научных исследований показывают, что использование тиристорного электропривода переменного тока дает возможность уменьшению дерганий в электродвигателях и возможность мягкого пуска.
Библиографический список
- М. П. Белов, В. А.
 Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.
Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г. - Абрамов А.Г. Размерный ряд индукционных автоматических реостатов для электродвигателей с фазным ротором. Электричество №12 сраница 46-49 1965 год
- Шмелев А.Н. Шишло К.С. Электрооборудование промишленных предприятий текстильного производства М. Легкая индустрия. 1975 год
- Башарин А.Б, Новиков В.А., Соколовский Г.Г. Управление электроприводами Л. Энергия 1982 гор
Количество просмотров публикации: Please wait
Все статьи автора «Режабов Зайлобиддин Маматович»
Устройство управления асинхронным двигателем и двигателями постоянного тока
Полезная модель относится к системам промышленной автоматики и может быть использована для управления, как асинхронным двигателем, так и двигателями постоянного тока. Указанный технический результат достигают за счет того, что устройство управления асинхронным двигателем и двигателями постоянного тока содержит источник питания, к которому подключен интеллектуальный транзисторный модуль, связанный с устройством управления, асинхронный двигатель. К интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания. К устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока. 1 ил.
К интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания. К устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока. 1 ил.
Полезная модель относится к системам промышленной автоматики и может быть использована для управления, как асинхронным двигателем, так и двигателями постоянного тока.
Известно устройство управления двигателем постоянного тока [свидетельство на полезную модель РФ 37283, МПК Н02Р 5/175, опубл. 10.04.2004], содержащее вход для подключения источника обратной связи, датчик тока, сетевой трансформатор, первичная обмотка которого подключена к сетевому напряжению, управляемый выпрямитель, содержащий два полупроводниковых вентиля, два диода и две помехозащитные цепи. Фаза сетевого напряжения подключена к катоду первого полупроводникового вентиля и аноду первого диода, ноль сетевого напряжения подключен к катоду второго полупроводникового вентиля и аноду второго диода. Аноды первого и второго полупроводниковых вентилей подключены к первому входу датчика тока. Катоды первого и второго диодов подключены к первому выходу тиристорного преобразователя, второй выход которого соединен со вторым входом датчика тока. Две защитные цепи включенны параллельно цепям сетевого напряжения и выходам тиристорного преобразователя. В управляемом выпрямителе в качестве двух полупроводниковых вентилей выбраны оптотиристоры. Входы управления первого и второго оптотиристоров подключены, соответственно, к выходам первого и второго усилителей мощности. Вторичная обмотка сетевого трансформатора подключена к первому входу узла суммирования. Второй вход узла суммирования связан с источником постоянного напряжения смещения, а его выход подключен к соответствующему входу первого микроконтроллера.
Фаза сетевого напряжения подключена к катоду первого полупроводникового вентиля и аноду первого диода, ноль сетевого напряжения подключен к катоду второго полупроводникового вентиля и аноду второго диода. Аноды первого и второго полупроводниковых вентилей подключены к первому входу датчика тока. Катоды первого и второго диодов подключены к первому выходу тиристорного преобразователя, второй выход которого соединен со вторым входом датчика тока. Две защитные цепи включенны параллельно цепям сетевого напряжения и выходам тиристорного преобразователя. В управляемом выпрямителе в качестве двух полупроводниковых вентилей выбраны оптотиристоры. Входы управления первого и второго оптотиристоров подключены, соответственно, к выходам первого и второго усилителей мощности. Вторичная обмотка сетевого трансформатора подключена к первому входу узла суммирования. Второй вход узла суммирования связан с источником постоянного напряжения смещения, а его выход подключен к соответствующему входу первого микроконтроллера. Другой вход первого микроконтроллера подключен к источнику постоянного напряжения смещения. К соответствующим выходам первого микроконтроллера подключены входы первого и второго усилителей мощности, а к соответствующим входам первого микроконтроллера подключены первый и второй входы тиристорного преобразователя, первый и второй входы второго микроконтроллера подключены к выходу сглаживающего фильтра, вход которого подключен к выходу датчика тока. Третий вход второго микроконтроллера связан с источником постоянного опорного напряжения, а его первый и второй выходы подключены, соответственно, к входам первой и второй гальванических развязок, выходы которых подключены к соответствующим входам первого микроконтроллера, при этом пульт управления связан с первым микроконтроллером.
Другой вход первого микроконтроллера подключен к источнику постоянного напряжения смещения. К соответствующим выходам первого микроконтроллера подключены входы первого и второго усилителей мощности, а к соответствующим входам первого микроконтроллера подключены первый и второй входы тиристорного преобразователя, первый и второй входы второго микроконтроллера подключены к выходу сглаживающего фильтра, вход которого подключен к выходу датчика тока. Третий вход второго микроконтроллера связан с источником постоянного опорного напряжения, а его первый и второй выходы подключены, соответственно, к входам первой и второй гальванических развязок, выходы которых подключены к соответствующим входам первого микроконтроллера, при этом пульт управления связан с первым микроконтроллером.
Известно устройство управления асинхронным двигателем [свидетельство РФ на полезную модель 9102, МПК Н02Р 3/16, опубл. 16.01.1999], выбранное в качестве прототипа, содержащее микропроцессорный контроллер, обладающий возможностью формирования широтно-импульсной модуляции выходного сигнала по синусоидальному закону, двигатель переменного тока электропривода, датчики напряжения и тока, трехфазный мостовой инвертор с датчиком температуры, коммутационную аппаратуру, трехфазный мостовой выпрямитель, входы которого через коммутационную аппаратуру соединены с силовой сетью, а выход подключен к выводам емкости сглаживающего фильтра.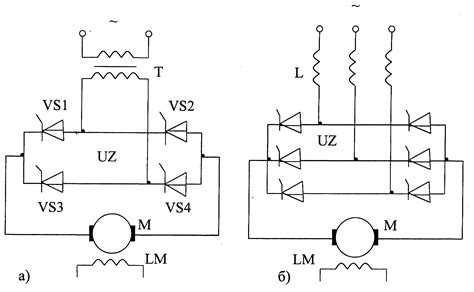 Первый вывод емкости сглаживающего фильтра соединен с первыми входами трехфазного мостового инвертора и датчика напряжения. Второй вывод емкости сглаживающего фильтра через последовательно соединенный датчик тока подключен ко второму входу трехфазного мостового инвертора и датчика напряжения. К трем выходам трехфазного мостового инвертора подсоединен двигатель электропривода переменного тока, входы управления трехфазного мостового инвертора соединены с выходами микропроцессорного контроллера. Входы которого соединены с выходами датчиков тока, напряжения и температуры. Первый вход микропроцессорного контроллера соединен с выходом датчика давления. Выходы последовательно соединенных ключа, токового реле и резистора, а также входы порогового элемента соединены с первым и вторым выводами емкости сглаживающего фильтра. Управляющий вывод ключа соединен с выходом порогового элемента. Нормально замкнутые контакты токового реле включены последовательно в цепь питания коммутационной аппаратуры.
Первый вывод емкости сглаживающего фильтра соединен с первыми входами трехфазного мостового инвертора и датчика напряжения. Второй вывод емкости сглаживающего фильтра через последовательно соединенный датчик тока подключен ко второму входу трехфазного мостового инвертора и датчика напряжения. К трем выходам трехфазного мостового инвертора подсоединен двигатель электропривода переменного тока, входы управления трехфазного мостового инвертора соединены с выходами микропроцессорного контроллера. Входы которого соединены с выходами датчиков тока, напряжения и температуры. Первый вход микропроцессорного контроллера соединен с выходом датчика давления. Выходы последовательно соединенных ключа, токового реле и резистора, а также входы порогового элемента соединены с первым и вторым выводами емкости сглаживающего фильтра. Управляющий вывод ключа соединен с выходом порогового элемента. Нормально замкнутые контакты токового реле включены последовательно в цепь питания коммутационной аппаратуры.
Недостатком этих устройств является то, что они способны управлять только конкретным видом электродвигателя.
Задачей полезной модели является создание устройства управления асинхронным двигателем и двигателями постоянного тока.
Поставленная задача решена за счет того, что устройство управления асинхронным двигателем и двигателями постоянного тока, так же, как в прототипе содержит источник питания, к которому подключен интеллектуальный транзисторный модуль, связанный с устройством управления, асинхронный двигатель. Согласно полезной модели к интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания. К устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока.
Предложенная схема устройства управления асинхронным двигателем и двигателями постоянного тока позволяет с помощью одного устройства управлять по заданному технологическому параметру асинхронным двигателем и двигателями постоянного тока (до трех одновременно) с обеспечением реверса и электродинамического торможения. Устройство так же обеспечивает фильтрацию входных сигналов, защиту от ошибочных команд, защиту от перегрузки и короткого замыкания; реализовывать цифровые локальные контуры регулирования тока, частоты вращения, а также различных параметров технологических процессов.
Устройство так же обеспечивает фильтрацию входных сигналов, защиту от ошибочных команд, защиту от перегрузки и короткого замыкания; реализовывать цифровые локальные контуры регулирования тока, частоты вращения, а также различных параметров технологических процессов.
На фиг.1 изображена принципиальная схема устройства управления асинхронным двигателем и двигателями постоянного тока.
Устройство управления асинхронным двигателем и двигателями постоянного тока содержит источник питания 1 (ИП), подключенный к промышленной сети. К источнику питания параллельно подключен интеллектуальный транзисторный модуль 2 (ИТМ), соединенный с устройством управления 3 (УУ). К источнику питания параллельно подключены обмотки возбуждения 4.1, 4.2, 4.3 двигателей постоянного тока и блок реле 5 (БР). Обмотки якоря 6.1, 6.2, 6.3 двигателей постоянного тока, подключены одним концом к реле 7 (Р), которое соединено с интеллектуальным транзисторным модулем 2 (ИТМ), а другим — к блоку реле 5 (БР). Реле 7(Р) связано с устройством управления 3 (УУ). Блок реле 5 (БР) подключен к устройству управления 3 (УУ). Асинхронный двигатель 8 подключен к реле 7 (ИТМ). Устройство управления 3 (УУ) может быть связано с любым аналоговым датчиком и ЭВМ.
Реле 7(Р) связано с устройством управления 3 (УУ). Блок реле 5 (БР) подключен к устройству управления 3 (УУ). Асинхронный двигатель 8 подключен к реле 7 (ИТМ). Устройство управления 3 (УУ) может быть связано с любым аналоговым датчиком и ЭВМ.
В качестве источника питания 1 (ИП) может быть использован любой источник питания постоянного тока. В качестве интеллектуального транзисторного модуля 2 (ИТМ) может быть использован любой интеллектуальный транзисторный модуль, содержащий три пары транзисторов. В качестве устройства управления 3 (УУ) может быть использовано любое цифровое устройство на микроконтроллере или микропроцессоре, содержащее шесть широтно-импульсных модуляторов, дискретные выходы и аналоговые входы. Блок реле 5 (БР) может быть составлен из любых реле с переключающимся контактом. В качестве реле 7 (Р) можно использовать любое переключающееся трехфазное реле.
Устройство управления асинхронным двигателем и двигателями постоянного тока может работать в двух режимах.
Первый режим — режим асинхронного двигателя.
Выпрямленное напряжение от источника питания 1 (ИП) поступает на интеллектуальный транзисторный модуль 2 (ИТМ) и на блок реле 5 (БР). Устройство управления 3 (УУ) коммутирует, с помощью реле 7 (Р), сигнал с интеллектуального транзисторного модуля 2 (ИТМ) на асинхронный двигатель 8. На интеллектуальном транзисторном модуле 2 (ИТМ) устройство управления 2 (УУ) формирует с помощью широтно импульсной модуляции синусоидальное трехфазное напряжение с регулируемой частотой, поступающее на асинхронный двигатель 8. Блок реле 5 (БР) в этом режиме не задействован и может быть использован для включения, по программе, различной нагрузки.
Второй режим — режим двигателя постоянного тока.
Выпрямленное напряжение от источника питания 1 (ИП) поступает на интеллектуальный транзисторный модуль 2 (ИТМ), на обмотки возбуждения 4.1, 4.2, 4.3 двигателя постоянного тока и на блок реле 5 (БР). Устройство управления 3 (УУ) коммутирует, с помощью реле 7 (Р), сигнал с интеллектуального транзисторного модуля 2 (ИТМ) на первый вывод обмотки якоря 6. 1 двигателя постоянного тока, и, в зависимости от требуемого направления вращения двигателя постоянного тока, коммутирует с помощью блока реле 5 (БР) напряжение требуемой полярности на второй вывод обмотки якоря 6.1. На интеллектуальном транзисторном модуле 2 (ИТМ) устройством управления 3 (УУ) формируется широтно-импульсный сигнал, поступающий на первый вывод обмотки якоря 6.1. При реверсе устройство управления 3. (УУ), с помощью блока реле 5 (БР), меняет полярность напряжения на втором выводе обмотки якоря 6.1, и, с помощью интеллектуального транзисторного модуля 2 (ИТМ), полярность на первом выводе обмотки якоря 6.1 двигателя постоянного тока. Динамическое торможение производится путем закорачивания обмотки якоря 6.1 с помощью широтно импульсной модуляции с ограничением по току. Управление двумя или тремя двигателями постоянного тока аналогично управлению одним двигателем постоянного тока.
В любом режиме устройство управления 3 (УУ) позволяет реализовывать цифровые локальные контуры регулирования тока, частоты вращения, а также различных параметров технологических процессов и обеспечивает фильтрацию входных сигналов, защиту от ошибочных команд, защиту от перегрузки и короткого замыкания. Устройство управления 3 (УУ) позволяет производить настройку и контроль параметров с помощью ЭВМ.
Устройство управления асинхронным двигателем и двигателями постоянного тока, содержащее источник питания, к которому подключен интеллектуальный транзисторный модуль, связанный с устройством управления, асинхронный двигатель, отличающееся тем, что к интеллектуальному транзисторному модулю и устройству управления подключено реле, связанное с асинхронным двигателем и одним выводом обмоток якорей от одного до трех двигателей постоянного тока, обмотки возбуждения которых параллельно подключены к источнику питания; к устройству управления и к источнику питания подключен блок реле, к которому подсоединены вторым выводом обмотки якорей двигателей постоянного тока.
Асинхронный двигатель с тиристорным регулятором напряжения
Механика Асинхронный двигатель с тиристорным регулятором напряжения
просмотров — 1136
Скорость асинхронного двигателя (АД) можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна частоте сети 50 Гц.
Для регулирования напряжения на статоре АД (рис. 8.11) наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления αа в функции внешнего сигнала Uy. Изменяя угол управления αа от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля. Форма напряжения статора является несинусоидальной.
Несинусоидальное напряжение представим как совокупность нес-кольких синусоидальных напряжений –— гармоник с определенной час-тотой. Частота изменения первой из них (основной) равна частоте питающего напряжения f1,ь а частоты других гармоник больше, чем первой. Основная гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.На рис.8.14,(б)показаны механические характеристики АД при изменении напряжения на его статоре.
Регулирование напряжения на статоре не приводит к изменению скорости ХХωw0 и не влияет на критическое скольжение sK, но изменяет значение критического (максимального) момента МKк. Критический момент пропорционален квадрату напряжения: МKк~ U2регU2РЕГ.
Рис. 8.11.Схема асинхронного ЭП с тиристорным пусковым устройством
Скольжение s определяется зависимостью, где ω0 – скорость идеаль-
ного холостого хода АД:
Скольжение sопределяется зависимостью
где w0 — скорость идеального холостого хода АД.
Полная мощность на валу, включающая потери на трение и венти-ляцию:
РМЕХ = Мω,
где М – — электромагнитный момент двигателя.
Полная электромагнитная мощность, передаваемая от статора к ро-тору через воздушный зазор:
РЭМ = Мω0 .
Разность мощностей рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
. (8.1)
Часть электромагнитной мощности, пропорциональная скольжению s, рассеивается в виде теплоты в обмотке ротора, другая часть, пропор-циональная (1 — s), передается на вал двигателя, ᴛ.ᴇ.
(8.2)
Т. о.,Способ регулирования скорости изменением напряжения является неэкономичным, так как потери в роторе при постоянном моменте наг-рузки возрастают пропорционально скольжению.
Из (8.1) получим выражение длямомент двигателя:
, (8.3)
где т –— число фаз статора; r2–— сопротивление ротора.
.
В установившемся режиме работы момент двигателя М равен мо-менту сопротивления МсМС. Для вентиляторной нагрузки
Вывод. Токи АД обратно пропорциональны .
Продифференцировав последнее выражение, легко показать, что токи имеют максимальное значение при s = 1/3 или ωw = 2/Зωw0. Для постоянного момента нагрузки полу-чаем:
.
| Рис. 8.12. Характеристика АД с повышенным сопротивлением статора |
Cопротивление ротора является важным параметром, влияющим на токи двигателя. Для получения удов-летворительных режимов работы двигателя с вентиляторным моментом сопротивления на валу крайне важно применять двигатели с повышенным сопротивлением ротора, обеспечи-вающим номинальное скольжение 10…12 %. При работе с постоянным моментом нагрузки сопротивление ротора должно быть еще больше.
На рис. 8.12 приведены харак-теристики двигателя с повышенным сопротивлением ротора. Их сравнение с характеристиками на рис. 8.11 показывает, что при применении двигателя с повышенным сопротив-лением ротора удается несколько увеличить диапазон регулирования. Для рассматриваемого способа используются также двигатели с пере-менным сопротивлением ротора. Обычные глубокопазовые или двух-кле-точные двигатели в этих случаях оказываются малоэффективными. Луч-шие характеристики имеют двигатели с массивным ротором или клиньями, изготовленными в виде постоянных магнитов. В этом случае нагрев двигателя уменьшается, так как часть потерь в роторной цепи рассеивается вне двигателя.
Все перечисленные мероприятия не могут существенноо устранить потери в роторной цепи,что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, (см. рис.7.8,а) бывают использованы обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, бывают использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
| Рис. 8.13. Схема тиристорного регулятора напряжения для реверсивной схемы |
| Рис. 8.14. Схема несимметричного регулятора напряжения асинхронного двигателя |
Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Схема регулятора напряжения может содержать только два тирис-тора, включенных в одну из фаз статора двигателя. При этом в несиммет-ричных схемах усугубляются проблемы, связанные с нагревом двига-теля, так как нагрузка между его фазами распределяется неравномерно и некоторые фазы оказываются сильно перегруженными. Стоит сказать, что для несиммет-ричной нагрузки линейные напряжения, приложенные к зажимам статора в общем случае не равны друг другу
В случае если магнитная цепь АД не насыщена, то система несимметричных напряжений с помощью метода симметричных составляющих заменяется двумя системами симметричных напряжений прямой и обратной после-довательностей, которым соответствуют магнитные потоки двигателя, вращающиеся в противоположных направлениях. В случае если принять угловую скорость прямого поля ωwпр = ωwо за положительную, то угловая скорость обратного поля ωwобр = -ωwо В соответствии с этим скольжение относительно поля прямой последовательности вычисляется по формуле
а последовательности:относительно поля обратной последовательности по формуле
Момент, развиваемый двигателем при асимметричной системе нап-ряжений, равен алгебраической сумме моментов, обусловленных полями прямой и обратной последовательностей::
.
Поскольку каждая из рассматриваемых систем напряжений симмет-рична, для них справедливы известные формулы расчета момента АД.
Несмотря на все отмеченные недостатки, система ТРН-АД вследст-вие ее простого конструктивного исполнения, нашла широкое примене-ние в связи с тем, что она позволяет обеспечить плавный пуск и тормо-жение электродвигателя, ограничить пусковой момент и токи, изменять направление скорости АД. На базе ТРН изготовляются тиристорные ре-версивные и нереверсивные контакторы для пуска, реверса и торможе-ния АД.
Одна из реальных областей применения системы ТРН-АД связана с использованием ее в ЭП насосных и вентиляторных установок.
Скорость асинхронного двигателя (АД) можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна частоте сети 50 Гц.
Для регулирования напряжения на статоре АД (рис. 8.11) наибольшее распространение. .. [читать подробенее]
Схемы управления асинхронными электродвигателями | Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Подробности
- Категория: Разное-архив
- РЗиА
- потребитель
- оборудование
- низковольтное
- подстанции
- среднее напряжение
Содержание материала
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Газоразрядные лампы
- Установки для электрического освещения
- Облучение растений в теплицах
- Применение осветительных установок на птицефермах
- Установки ультрафиолетового облучения
- Установки инфракрасного нагрева
- Электротехнологические установки
- Установки электронно-ионной технологии
- Ультразвуковая техника
- Установки для магнитной обработки материалов
- Устройства для обработки сред электрическим током
- Электропривод и его основные части
- Характеристики и режимы работы электродвигателей
- Регулирование скорости в электроприводах
- Выбор электродвигателей
- Аппаратура управления электродвигателями
- Рубильники и переключатели
- Путевые выключатели
- Контакторы и электромагнитные пускатели
- Реле управления
- Тиристорные пускатели
- Логические элементы
- Плавкие предохранители
- Автоматические выключатели
- Тепловые реле и температурная зашита
- Автоматическое управление электроприводами
- Принципы управления двигателями постоянного тока
- Схемы управления асинхронными электродвигателями
- Блокировочные связи и сигнализация в схемах управления электроприводами
- Следящий привод, применение магнитных и тиристорных усилителей
- Дистанционное управление электроприводами
- Электропривод ручных инструментов и стригальных машинок
- Управление электроприводами поточных линий
- Электропривод поточных линий приготовления кормов
- Управление поточными линиями кормораздачи
- Управление электроприводами комплекса машин по удалению навоза и помета
- Эффективность и перспективы электрификации тепловых процессов, способы нагрева
- Способы охлаждения и типы холодильных машин
- Электродуговые нагреватели
- Индукционные и диэлектрические нагреватели
- Автоматизация электронагревательных установок
- Выбор и настройка автоматических регуляторов электронагревательных установок
- Электрические водонагреватели и котлы
- Электродные водогрейные и паровые котлы
- Электрооборудование и автоматизация электрокотельных, электрокалориферные установки
- Электрообогреваемые полы
- Средства местного электрообогрева
- Электрические инкубаторы
- Электрический обогрев парников и теплиц
- Установки для электротепловой обработки продуктов и кормов
- Электротерморадиационная и высокочастотная сушка
- Электротепловая обработка пищевых продуктов и кормов
- Электротермические печи
- Электросварочное оборудование
- Высокочастотные установки
- Низкотемпературные установки
- Холодильные производственные установки
- Электрооборудование и автоматизация плодо- и овощехранилищ
Страница 29 из 59
Управление двигателями с короткозамкнутым ротором.
Асинхронные электродвигатели с короткозамкнутым ротором, как правило, управляются при помощи магнитных пускателей. Пуск электродвигателей осуществляется непосредственным включением на полное напряжение.
Простейшая схема управления двигателем с нереверсивным магнитным пускателем показана на рисунке 13.1. В этой схеме предусматривается питание силовых цепей и цепей управления от одного источника напряжения.
При включении автомата F напряжение подается на силовые и вспомогательные цепи схемы. Нажатием кнопки S2 замыкается цепь катушки магнитного пускателя К, при этом главные контакты К замыкаются и включают двигатель в сеть. Одновременно блок-контакт К шунтирует кнопку S2 и дальнейшее удержание кнопки в нажатом состоянии становится ненужным.
Отключение двигателя от сети выполняется нажатием кнопки S1. Цепь питания катушки К разрывается, что приводит к размыканию всех контактов магнитного пускателя.
В схеме предусмотрена защита электродвигателя от коротких замыканий и перегрузки при помощи автоматического выключателя, который для этой цели содержит комбинированный расцепитель.
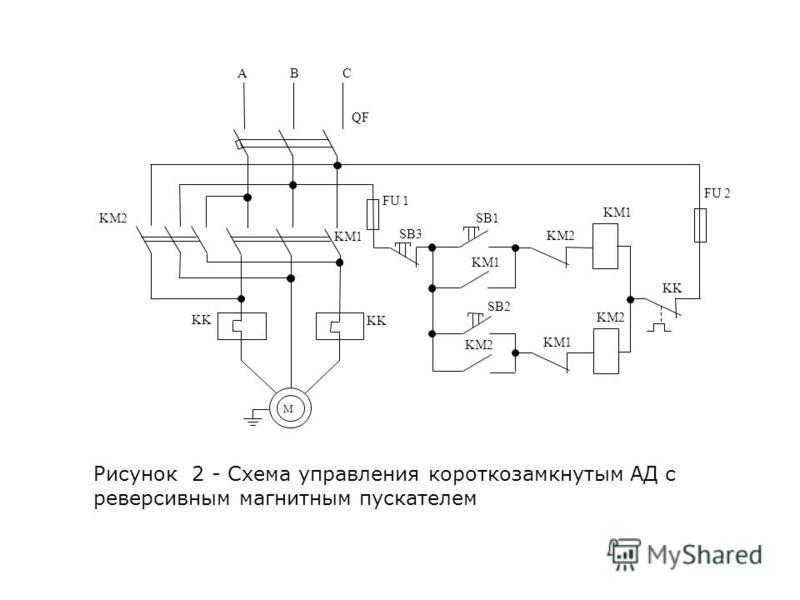
Схема магнитного пускателя с кнопочными выключателями осуществляет также защиту от самопроизвольных включений электродвигателя (нулевая защита) при восстановлении напряжения питания после кратковременного его исчезновения. Повторный пуск электродвигателя возможен только после вторичного нажатия кнопки S2. В тех случаях, когда необходимо изменять направление вращения, управляют электродвигателем реверсивным магнитным пускателем, схема которого показана на рисунке 13.7.
При нажатии кнопки S1 получает питание катушка К1 магнитного пускателя, замыкаются силовые контакты в главной цепи и статор двигателя присоединяется к сети при прямом чередовании фаз.
При нажатии кнопки S2 ее размыкающий контакт, установленный в цепи катушки К1, размыкается, благодаря чему реверс электродвигателя может быть произведен без предварительного нажатия кнопки S3. Чередование фаз при этом меняется на обратное.
Для торможения асинхронных короткозамкнутых электродвигателей применяется электродинамическое торможение и торможение противовключением.
Электродинамическое торможение осуществляется путем отключения обмоток статора электродвигателя от сети переменного тока и подачей в них постоянного тока на период торможения.
Торможением противовключением осуществляется при помощи реверсивного магнитного пускателя и реле контроля скорости.
Реле состоит из постоянного магнита, вращающегося вокруг оси и соединенного с валом двигателя. Постоянный магнит помещен в цилиндр, представляющий собой устройство в виде беличьей клетки. Цилиндр укреплен на подшипниках и может поворачивайся на определенный угол до упора, при этом переключаются контакты контактного мостика. При вращении постоянного магнита его поле пересекают проводники цилиндра, индуктируя в них электрический ток. Взаимодействие индуктированного тока и вращающегося магнитного потока приводит к перемещению цилиндра и переключению контактного мостика. На рисунке 13.8 показана схема торможения методом, противовключения.
При нажатии одной из кнопок S1 или S2 замыкаются соответственно цепи катушек контакторов и статор электродвигателя подключается к сети, ротор начинает вращаться. Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.
Рис. 13.8 Схема торможения асинхронного электродвигателя методом противовключения.
При остановке двигателя кнопкой S3 разрывается цепь ранее возбужденной катушки, отпадают контакты контакторов К1 или К2, а блок-контактом замыкаются цепи катушки контактора К1 в том случае, если электродвигатель работал в режиме «вперед», и наоборот. Таким образом, привод осуществляет реверс, однако двигатель продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения.
Рис. 13.9. Схема автоматического управления асинхронным электродвигателем с фазным ротором.
Частота вращения ротора уменьшается, и как только частота вращения станет близкой к нулю, контакты реле контроля скорости разомкнут цепи катушек контакторов К1 или К2 и отключат статор двигателя от сети.
Управление двигателями с фазным ротором. Пуск, торможение и регулирование частоты вращения электродвигателей с фазным ротором сопряжены с изменением сопротивлений, включенных в роторную цепь. Сопротивления должны изменяться в определенной последовательности.
На рисунке 13.9 показана схема автоматического управления двигателем с фазным ротором при помощи командоконтроллера, резисторы могут быть использованы как пусковые и регулировочные.
Для подготовки к пуску двигателя рукоятку командоконтроплера устанавливают в нулевое положение. При этом получают питание реле напряжения К.1, которое, сработав, зашунтирует контакт контроллера, замыкающийся только в нулевом положении. В положении 1 режима «Вперед» оказывается под напряжением катушка контактора К2, который срабатывает и своими главными контактами подключает статор двигателя к сети при введенных полностью ступенях реостата. Одновременно срабатывает реле К4, которое посредством своего замыкающего контакта замкнет цепь контактора противовключения К5, а последний своими главными контактами выключит резисторы противовключения в роторе и подготовит цепь для питания катушки первого контактора ускорения Кб. Таким образом, в положении 1 командоконтроллера двигатель работает на пониженной скорости при введенном в цепь ротора пусковом сопротивлении.
Для увеличения частоты вращения двигателя рукоятку командоконтроллера переводят в положение 2 «Вперед». Тогда выключится контактор Кб, шунтирующий первую ступень пускового резистора и с выдержкой времени подготавливающий цепь для питания контактора К7. При постановке рукоятки в следующие положения включаются последовательно контакторы К7 и К8, шунтирующие остальные ступени пускового реостата.
Реле времени, встроенные в контакторы К5, Кб, К7, обеспечивают минимальное время переключения пусковых сопротивлений, а увеличение времени пуска может быть достигнуто вручную медленным передвижением рукоятки контроллера. Аналогичным образом работает схема при перемещении рукоятки контроллера из нулевого положения в положения 1, 2, 3, 4 «Назад», только при этом будет включен контактор К3. Если оператор мгновенно переведет рукоятку из положения 4 «Вперед» в положение 4 «Назад», то вначале последовательно отключатся контакторы К8, К7, Кб, К5 ив цепь ротора будут введены все ступени реостата. Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Для остановки двигателя рукоятку командоконтроллера необходимо поставить в нулевое положение. Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Архив
- Разное архив
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
Еще по теме:
- Защита сельских сетей от кз
- Электрические аппараты и оборудование выше 1000В
- Электрификация сельскохозяйственного производства
- В помощь сельскому электромонтеру
- Электромонтер строительной площадки
Тиристорное управление трехфазными асинхронными двигателями
РЕКЛАМА:
В этой статье мы обсудим: 1. Тиристорное управление регуляторами переменного тока 2. Регулирование переменного напряжения и частоты 3. Регулирование переменного тока и переменной частоты 4. Тиристорное управление циклопреобразователями 5. Пуск при пониженном напряжении (плавный пуск) 6. Ротор Контроль сопротивления 7. Схема восстановления мощности скольжения.
Тиристорное управление регуляторов переменного тока
: Регулятор переменного тока преобразует постоянное переменное напряжение в переменное переменное напряжение той же частоты. Несомненно, уровень переменного напряжения можно изменить с помощью автотрансформатора, РПН, реактора насыщения и т. д. Эти устройства используются уже давно и используются до сих пор. Но регуляторы переменного тока, использующие тиристоры и симисторы, становятся все более популярными из-за их высокого КПД, быстрого управления и компактных размеров. Однако регуляторы переменного тока, использующие тиристоры и симисторы, вносят нежелательные гармоники в цепи. Регуляторы переменного тока классифицируются как однофазные и трехфазные. Каждый из них может быть полуволновым (т. е. однонаправленным) или полноволновым (т. е. двунаправленным).
Поскольку на вход регулятора переменного тока подается переменный ток, он всегда коммутируется от сети. Поэтому принудительная коммутация не требуется. Таким образом, схемы регуляторов переменного тока довольно просты. В регуляторах переменного тока используются два типа управления. Они известны как интегральное управление циклом и фазовое управление.
РЕКЛАМА:
В интегральном цикле управления, также известном как двухпозиционное управление, тиристоры используются в качестве переключателей для подключения двигателя к источнику питания на определенное количество циклов напряжения источника, а затем для его отключения на другое определенное количество циклов . Каждое время включения и выключения состоит из целого числа циклов. Тиристоры включаются импульсами затвора при пересечении нулевого напряжения входного напряжения.
При фазовом управлении тиристоры используются в качестве переключателей для подключения двигателя к источнику питания на определенную часть каждого цикла напряжения питания. Большинство регуляторов переменного тока используют управление фазой. Конфигурации силовых цепей для управления интегральным циклом и управления фазой ничем не отличаются.
Плавное изменение трехфазного переменного напряжения может быть реализовано за счет различных конфигураций силовой цепи.
Трехфазные регуляторы могут быть полуволновыми или двухполупериодными. Схема трехфазного полуволнового регулятора для двигателей, соединенных треугольником или звездой, у которых нейтральная точка недоступна, показана на рис. 3.34. В этой схеме используются три тиристора и три диода. Хотя полуволновой регулятор переменного тока, показанный на рис. 3.34, снижает стоимость полупроводниковых приборов и не приводит к возникновению постоянных составляющих ни в одной части системы, но он вносит больше гармоник в линейный ток, чем двухполупериодный регулятор. . Двухполупериодная схема на практике не используется.
На рис. 3.35 показан трехфазный двухполупериодный регулятор. В нем используется 6 тиристоров, по 2 на каждую фазу. Входной трансформатор может использоваться или не использоваться. Что касается нагрева обмоток двигателя, двигатель, соединенный звездой, питаемый от двухполупериодного регулятора переменного тока, предпочтительнее, чем двигатель, соединенный треугольником, питаемый от двухполупериодного регулятора переменного тока. Это так, потому что любая третья гармоника напряжения, генерируемая противо-ЭДС двигателя, может вызвать блуждающие токи в случае двигателя, соединенного треугольником.
Для цепей нагрузки, соединенных треугольником, в которых доступен каждый конец каждой фазы, используется схема, показанная на рис. 3.36. Такое расположение имеет то преимущество, что уменьшает ток устройства, поскольку теперь оно должно проводить 1/√3 тока, если бы они были соединены в линию обмотки треугольником. Как только волна фазного тока известна, волна линейного тока может быть построена с помощью суперпозиции.
Для цепей нагрузки, соединенных звездой, в которых нейтральная точка доступна и может быть разомкнута, может использоваться схема, показанная на рис. 3.37. При таком расположении необходимое количество тиристоров уменьшается до трех, а схема управления значительно упрощается. Потребляемая мощность двигателя может быть на 100 % больше, чем при управлении синусоидальным напряжением, особенно на пониженных скоростях.
Регулятор напряжения и частоты :РЕКЛАМА:
Если изменяется только частота, а напряжение статора поддерживается постоянным, магнитный поток статора не будет соответствовать номинальному значению. Работа с потоком ниже или выше номинального значения нежелательна. Для работы с постоянным потоком необходимо, чтобы ЭДС индукции увеличивалась или уменьшалась линейно с приложенной частотой. При более высоких напряжениях и при работе на высокой частоте потери на статоре очень малы, и, таким образом, работа с постоянным потоком достигается за счет поддержания постоянного отношения V/f.
Регулируемое напряжение и частота статора могут быть получены из систем, показанных на рис. 3.38 или на рис. 3.41, известных как прямоугольный инвертор и инвертор с широтно-импульсной модуляцией (ШИМ) соответственно.
Схема питания прямоугольного инвертора показана на рис. 3.38. Трехфазный источник переменного тока преобразуется в постоянный с помощью управляемого выпрямителя. Выход выпрямителя подается на схему фильтра для удаления гармоник. Выход постоянного тока от фильтра подается на управляемый инвертор, который обеспечивает выход переменного напряжения и переменной частоты. Это питание подается на статор трехфазного асинхронного двигателя, скорость которого необходимо регулировать.
РЕКЛАМА:
На рис. 3.39 показаны осциллограммы фазного напряжения V AN , V BN , V CN и осциллограммы линейного напряжения V AB , V BC и V CA . Каждая форма сигнала линейного напряжения смещена по фазе во времени на 120 электрических градусов относительно друг друга и представляет собой квазипрямоугольную волну шириной 120°. Примечательно, что тиристоры инвертора принудительно коммутируются, поскольку асинхронный двигатель является нагрузкой с отстающим коэффициентом мощности. Диоды обратной связи помогают циркулировать реактивной мощности нагрузки с фильтрующим конденсатором и поддерживают волны выходного напряжения фиксированными на уровне напряжения звена постоянного тока.
Требуемое соотношение напряжения и частоты асинхронного двигателя показано на рис. 3.40. Когда частота меньше нормальной частоты, напряжение уменьшается в той же пропорции, чтобы поддерживать постоянное значение V/f. На очень низких частотах, когда падение реактивного сопротивления становится меньше по сравнению с падением сопротивления статора (ω L < R), для компенсации этого эффекта требуется приложение дополнительного напряжения. Это означает более высокое отношение V/f. Когда частота превышает нормальную частоту, крутящий момент уменьшается с уменьшением потока в воздушном зазоре, и теперь двигатель работает в области постоянной мощности, как показано на рис. 3.40. Это эквивалентно режиму ослабления поля при управлении скоростью двигателя постоянного тока.
При работе на пониженном напряжении снижается напряжение преобразователя и, следовательно, уменьшается коммутационная способность конденсатора. Таким образом, инвертор обычно снабжен вспомогательным источником постоянного напряжения постоянного тока для целей коммутации.
РЕКЛАМА:
Упомянутый выше инвертор не может возвращать мощность обратно в линии питания переменного тока, если для формирования реверсивной системы не добавлен другой выпрямитель с фазовым управлением. Этот метод управления скоростью используется в 3-фазных асинхронных двигателях малых и средних размеров, где передаточное число обычно ограничено до 10:1.0003
Примечательно, что электрическая машина спроектирована в соответствии с точкой, близкой к точке насыщения на кривой намагничивания (или кривой B-H). Это сделано с точки зрения полной загрузки ядра. Если уменьшить частоту статора, поддерживая постоянное напряжение статора, двигатель будет работать в области насыщения и, следовательно, двигатель будет потреблять большой ток намагничивания, что приведет к увеличению потерь в сердечнике и статоре и, следовательно, к снижению эффективности двигателя. Однако, если увеличить только частоту питания, поддерживая постоянное напряжение статора, двигатель будет работать с низкой магнитной индукцией и, таким образом, мощность двигателя будет использоваться недостаточно.
Схема управления широтно-импульсной модуляцией (ШИМ) переменного напряжения с переменной частотой для асинхронного двигателя показана на рис. 3.41. Это новейший метод, который заменяет описанную выше схему инвертора прямоугольных импульсов.
Инверторы с широтно-импульсной модуляцией (ШИМ) используют прерывание или импульсный метод для управления выходным переменным напряжением статического инвертора. Напряжение в звене постоянного тока не регулируется диодным выпрямителем. Прямоугольное или ступенчатое выходное напряжение быстро включается и выключается несколько раз в течение каждого полупериода, так что формируется ряд импульсов одинаковой амплитуды. Каждый импульс имеет амплитуду входного напряжения инвертора В DC . Величина основного выходного напряжения регулируется изменением общего времени включения в течение полупериода. Коммутируя одну сторону моста несколько раз в течение полупериода, можно получить выходное напряжение формы волны, показанной на рис. 3.42 (а).
Простые ШИМ-инверторы могут быть легко созданы для создания формы сигнала всего с двумя импульсами за полупериод в пределах шестиступенчатой огибающей, как показано на рис. 3.42 (b). В таком сигнале присутствуют значительные пятая и седьмая гармоники, которые вызывают заметное ухудшение низкоскоростных характеристик двигателя переменного тока. Для устранения гармоник низкого порядка используются более совершенные методы ШИМ, в которых высокочастотные импульсы возникают на протяжении всего полупериода.
В сложных системах ШИМ ширина импульса изменяется в течение полупериода синусоидальным образом, как показано на рис. 3.43. На самом деле импульсы должны располагаться через равные интервалы, а ширина импульса в определенном положении должна быть пропорциональна площади под синусоидой в этом положении. В сигнале ШИМ самая низкая частота гармоники приходится на частоту повторения импульсов, и, если она намного выше основной частоты, адекватная фильтрация обеспечивается индуктивностью машины.
Такие сигналы обычно создаются с помощью схемы управления, в которой высокочастотный треугольный сигнал смешивается с синусоидальным сигналом желаемой частоты. Управление напряжением достигается за счет изменения ширины всех импульсов без изменения синусоидального соотношения.
На рис. 3.44 показан метод синусоидальной ШИМ, в котором равнобедренная треугольная волна сравнивается с сигналом синусоидальной волны, а точки коммутации определяются точками пересечения. Если индекс модуляции оказывается меньше единицы, на выходе появляются только гармоники несущей частоты с боковыми полосами, связанными с основной частотой.
Такая форма волны генерирует меньше гармонического нагрева и пульсации крутящего момента по сравнению с прямоугольной волной. Когда индекс модуляции превышает единицу, максимальное напряжение получается в прямоугольном режиме. Таким образом, режим ШИМ применим в области постоянного крутящего момента, в то время как в области постоянной мощности работа аналогична работе в режиме прямоугольной волны.
Транзисторное ШИМ-управление, показанное на рис. 3.45, используется для управления двигателями малых и средних размеров. Безусловно, силовые транзисторы стоят намного дороже, чем тиристоры той же мощности, но экономия за счет исключения схемы коммутации и соответствующих коммутационных потерь, схема оказывается более экономичной и эффективной. Кроме того, транзисторы работают быстрее, ШИМ возможен на более высокой частоте. Это дополнительно снижает потери машины.
Регулятор частоты переменного тока : Схема управления переменной частотой тока для асинхронного двигателя показана на рис. 3.46. Переменное постоянное напряжение, обеспечиваемое выпрямителем с фазовым управлением, преобразуется в источник тока путем последовательного подключения большой катушки индуктивности. Большая индуктивность поддерживает постоянный ток. Напряжение, доступное на клеммах статора трехфазного асинхронного двигателя, почти синусоидальное с наложенными пиками напряжения из-за коммутации. Используемый преобразователь представляет собой коммутируемую линию, в то время как инвертор коммутируется принудительно, поскольку асинхронный двигатель работает с отстающим коэффициентом мощности. Преобразователь с фазовым управлением можно заменить диодным выпрямителем, за которым следует прерыватель постоянного тока.
Схема имеет следующие преимущества:
(i) Поскольку входной ток постоянен, пропуски зажигания устройств и короткие замыкания не представляют проблемы.
(ii) Меньшее количество компонентов в цепи инвертора и меньшие коммутационные потери.
(iii) Прочная и надежная силовая цепь.
(iv) Более простая и надежная схема управления. Это связано с тем, что нужно управлять только 6 тиристорами.
(v) Пиковый ток устройств ограничен.
(vi) Он может работать с реактивными или рекуперативными нагрузками без обратных диодов.
Недостатки:
(i) Несколько вялая реакция привода.
(ii) Несколько громоздкий и дорогой инвертор. Это связано с большими размерами индуктивности и коммутационных конденсаторов.
(iii) Низкочастотный диапазон инвертора.
(iv) Он не может работать без нагрузки. Это связано с тем, что для удовлетворительной коммутации инвертора необходим некоторый минимальный ток нагрузки.
Тиристорное управление циклопреобразователями
:Циклоконвертер преобразует переменный ток одной частоты в переменный ток другой частоты. Циклопреобразователи можно классифицировать как однофазные в однофазные, трехфазные в однофазные и трехфазные в трехфазные устройства. Их также можно разделить на повышающие и понижающие циклопреобразователи. Повышающий циклоконвертер обеспечивает выходную частоту, частота которой выше, чем входная, в то время как понижающий циклоконвертер обеспечивает выходную частоту ниже, чем входная.
Понижающий циклоконвертер использует линейную или естественную коммутацию. Циклопреобразователи изначально разрабатывались для систем электрической тяги, работающих на частотах 25 Гц и 16 2/3 Гц. На ранних этапах использования циклопреобразователи использовали ртутно-дуговые выпрямители. С развитием тиристоров увеличилось применение циклопреобразователей.
Принципиальная схема силовой цепи трехфазного циклопреобразователя показана на рис. 3.47.
Независимое управление выходной частотой и напряжением достигается изменением только одного параметра, а именно изменением точек включения управляемых выпрямителей. Частота выходного напряжения регулируется скоростью, с которой точки срабатывания изменяются относительно точки покоя, а выходное напряжение регулируется максимальным отклонением точек срабатывания от точки покоя. Циклопреобразователь со связанной с ним схемой зажигания выдает выходное напряжение, которое является копией опорного напряжения.
Работа циклоконвертера характеризуется рядом особенностей. Как правило, они используются в качестве понижающих преобразователей частоты. Не существует фиксированного минимального отношения входной частоты к выходной; однако выходная частота обычно ограничивается одной третью или половиной входной или сетевой частоты. Ниже этих соотношений эффективность как циклопреобразователей, так и двигателей, поставляемых ими, начинает значительно падать.
Реверсивность — еще одна особенность приводных систем циклоконвертера. Привод двигателя переменного тока с питанием от циклопреобразователя будет реагировать на изменение полярности входных сигналов путем изменения направления вращения двигателя без использования контакторов для изменения последовательности фаз.
Еще одной важной характеристикой является способность циклопреобразователя управлять потоком мощности в любом направлении. Это, вместе с упомянутой выше функцией реверсивности, обеспечивает привод асинхронного двигателя, способный работать в любом из четырех квадрантов кривой скорости двигателя.
Хотя циклоконвертер имеет много привлекательных с теоретической точки зрения характеристик, у него есть несколько ограничений, из-за которых он не стал популярным. Ему нужно больше силовых полупроводников, чем инвертору. Например, для трехфазного циклопреобразователя требуется 18 тиристоров, тогда как для комбинации выпрямитель-инвертор (рис. 3.38) требуется только 12 тиристоров.
могут производить только субчастотный выход. Загрязнение линии гармониками и низким коэффициентом мощности также может быть проблемой для циклопреобразователей высокой номинальной мощности. Однако недавние достижения в области устройств быстрого переключения привели к созданию устройств, известных как преобразователи частоты с принудительной коммутацией (FCDFC), которые работают с высокой эффективностью и имеют низкое содержание гармоник.
Приводы циклопреобразователейобычно используются для двигателей больших размеров, поскольку стоимость и сложность силовых цепей и цепей управления не позволяют использовать их для обычных приложений. Циклопреобразователи использовались в дизельных электровозах, где высокочастотный генератор переменного тока, соединенный с валом двигателя, обеспечивает мощность на входе. Они также использовались в безредукторных приводах цементных мельниц или шаровых мельниц.
Пуск при пониженном напряжении (плавный пуск) : Пусковой линейный ток при полном напряжении асинхронного двигателя может примерно в 6 раз превышать номинальный ток при полной нагрузке. Такой большой ток может вызвать сильное падение напряжения в сети, питающей асинхронный двигатель.
Схема, показанная на рис. 3.48, может использоваться для подачи пониженного напряжения при пуске. Как видно, это трехфазный регулятор переменного тока. При правильном управлении углом открытия регулятор обеспечивает низкое выходное напряжение, подаваемое на асинхронный двигатель. Когда двигатель достигает полной или номинальной скорости, регулятор может быть закорочен механическим контактором, чтобы двигатель работал нормально при номинальном напряжении. Более того, если двигатель используется для привода с постоянной скоростью, можно работать с двигателем при пониженном напряжении, когда механическая нагрузка мала. Работа при пониженном напряжении приводит к уменьшению потерь мощности в двигателе и, таким образом, к экономии энергии.
Контроль сопротивления ротора : Обычный метод подключения сопротивлений через контактные кольца асинхронного двигателя с фазным ротором представляет собой форму контроля напряжения ротора. Основным недостатком этого метода управления скоростью является его низкая эффективность из-за потери мощности во внешних резисторах.
На рис. 3.49 (а) показаны трехфазный диодный выпрямитель и запирающий тиристор (GTO), включенные в цепь ротора асинхронного двигателя с фазным ротором. ГТО, работающий как прерыватель, изменяет сопротивление R в соответствии с рабочим циклом α. Эффективное сопротивление R e определяется как-
R e = R (1 – α) …(3,59)
Таким образом, скорость асинхронного двигателя с фазным ротором регулируется путем изменения соотношения времени включения и времени выключения.
Схема рекуперации мощности тиристора: Рис. 3.49 (б) показывает схему, известную как восстановление мощности скольжения Рис. 3.48. Выводы ротора подключены к трехфазной сети переменного тока через два полностью управляемых тиристорных моста. Мост 1 действует как выпрямитель (или преобразователь), а мост 2 действует как инвертор. Выходная мощность ротора может возвращаться обратно к источнику питания. Поскольку частота токов ротора является частотой скольжения, этот метод известен как схема восстановления мощности скольжения. Управляя углами открытия двух мостов, можно изменять выходную мощность ротора.
Таким образом, скольжение и скорость двигателя (при том же крутящем моменте) также изменятся. Однако недостатком этой схемы является то, что оба моста потребляют реактивную мощность от питающей сети. Следовательно, общий коэффициент мощности двигателя плохой. Если желательны скорости только ниже синхронной, мост 1 может быть неуправляемым и, таким образом, может состоять из диодов. Если оба моста управляются, работа двух мостов также может быть реверсирована для получения скорости выше синхронной.
Фактически мощность скольжения либо возвращается в сеть питания, как в схеме Шербиуса, либо используется для привода вспомогательного двигателя, который механически соединен с валом асинхронного двигателя, как в схеме Крамера.
1. Статический привод Шербиуса:
Статический привод Шербиуса также использует принцип восстановления мощности скольжения. Принципиальная схема показана на рис. 3.50. Для достижения как субсинхронного, так и сверхсинхронного управления скоростью преобразователи 1 и 2 должны быть полностью управляемыми тиристорными мостами, один из которых работает на частоте скольжения как выпрямитель или инвертор, а другой работает на частоте сети как инвертор или выпрямитель. Стоимость преобразователей весьма ощутима, а также требуется стробирующая схема со сдвигом частоты.
Кроме того, при скоростях, близких к синхронным, когда ЭДС частоты скольжения достаточно малы для естественной коммутации, требуются специальные соединения для методов принудительной коммутации. Если преобразователь 1 взять неуправляемый (диодный мост), каскад преобразователя и блок управления станут экономичными и простыми, но тогда будет доступно только подсинхронное управление скоростью.
Трехфазный трансформатор между источником питания и инвертором 2 предназначен для доведения напряжения цепи ротора до значения, соответствующего напряжению источника питания. Основным недостатком субсинхронного каскадного привода является низкий коэффициент мощности, особенно на пониженных скоростях.
Этот привод применяется в приводах вентиляторов и насосов большой мощности, которым требуется регулирование скорости только в узком диапазоне. Номинальная мощность инвертора и трансформатора с диодным мостом равна максимальному скольжению, умноженному на номинальную мощность двигателя, что приводит к низкой стоимости привода. Этот привод обеспечивает постоянный контроль крутящего момента. Постоянный контроль мощности можно получить с помощью привода Kramer, обсуждаемого ниже.
2. Статический привод Kramer:
На рис. 3.51 показана принципиальная схема каскада Крамера со статическим преобразователем. Цепь ротора асинхронного двигателя с контактными кольцами подает мощность скольжения, выпрямленную диодным мостом, на якорь двигателя постоянного тока с независимым возбуждением, механически связанного с асинхронным двигателем. Регулирование скорости достигается путем изменения тока возбуждения двигателя постоянного тока. Можно считать, что ЭДС, пропорциональная противоЭДС двигателя постоянного тока, вводится в цепь ротора асинхронного двигателя, вызывая изменение скорости системы.
Для достижения большего диапазона скоростей потребуется замена диодного моста на тиристорный мост. С помощью тиристорных мостов скорость можно регулировать вплоть до полной остановки.
Статический привод Крамера не имеет инвертора с линейной коммутацией, он потребляет меньше реактивной мощности и вносит меньше гармоник в токи, чем статический привод Шербиуса. Однако у него есть проблемы с техническим обслуживанием, которые возникают из-за коллектора и щеток вспомогательного двигателя постоянного тока. Он также имеет недостаток большой момент инерции.
Системы статического привода Kramer используются в насосах большой мощности и нагрузках компрессорного типа, где регулирование скорости осуществляется в узком диапазоне и ниже синхронной скорости.
Главная ››
Тиристорная управляемая мощность для однофазного асинхронного двигателя с использованием микроконтроллера
pic Тиристорное регулирование мощности для однофазного асинхронного двигателя: Управление мощностью является очень важным фактором, особенно с точки зрения силовой электроники для передачи мощности на выходную нагрузку для ее хорошей работы. Различные методы или типологии используются для управления мощностью с помощью полупроводниковых устройств, в некоторых из которых используется полевой транзистор на основе оксида металла (MOSFET), а в некоторых — транзистор с биполярным переходом (BJT). Схема обнаружения пересечения нуля будет полезна для вас в этом проекте электроники . Здесь мы будем управлять мощностью однофазного двигателя , подключив тиристор на входной стороне однофазного двигателя. Мощность будет регулироваться изменением угла открытия тиристора.
Эта топология или метод управления мощностью имеет более высокую производительность и эффективность по сравнению с другими методами управления мощностью. В этой методике напряжение будет детектировать в каждый конкретный момент времени и тогда тиристор будет срабатывать при любом напряжении. Таким образом можно легко контролировать мощность. Здесь мы бы сделали эту систему питания с тиристорным управлением с помощью однофазного трансформатора, мостового выпрямителя, регулятора напряжения, полупроводникового переключателя SCR, микроконтроллера 18F452, который принадлежит к семейству pic, компаратора и оптопары или оптоизолятора.
Содержание
Блок-схема системы питания с тиристорным управлением для однофазного асинхронного двигателяНа приведенном ниже рисунке показана блок-схема системы питания с тиристорным управлением для однофазного асинхронного двигателя.
Список компонентов системы питания с тиристорным управлением для однофазного асинхронного двигателя. повышать или понижать переменное напряжение и работает по принципу взаимной индукции. В этой тиристорной системе питания он используется для понижения напряжения 220 В до 12 В переменного тока.Мостовой выпрямитель: Мостовой выпрямитель состоит из четырех диодов и используется для преобразования переменного тока в постоянный. В этой системе питания с тиристорным управлением он используется только для преобразования переменного напряжения в постоянное.
Блокировочный диод: В этой тиристорной системе питания диод подключается на выходе мостового выпрямителя для блокировки обратного тока к мостовому выпрямителю.
Регулятор напряжения: В этой системе питания с тиристорным управлением регулятор напряжения используется только для регулирования 12 постоянного тока в 5 В постоянного тока для питания микроконтроллера и других электронных компонентов.
Детектор перехода через ноль: В этой тиристорной, управляемой системе питания детектор перехода через ноль в основном представляет собой компаратор, который сравнивает два входа, один вход поступает со стороны входа, а второй является опорным входом, который поступает, возможно, от переменного резистора или выхода. сторона. Когда один вход больше, чем другой вход, выход компаратора будет высоким.
Микроконтроллер pic 18F452: В этой системе питания с тиристорным управлением микроконтроллер pic 18F452 используется для управления углом открытия тиристора. Этот контроллер получает питание 5 В постоянного тока и взаимодействует с двумя оптопарами. Он состоит из 40 контактов, и эти контакты могут быть настроены как вход или выход, и один вход поступает от компаратора. Программируется на языке c с помощью программного обеспечения mikro/c.
Оптопара: Оптопара представляет собой 6-контактное устройство интегральной схемы, и в этой системе питания с тиристорным управлением она используется для изоляции и для задания угла открытия тиристора. Тиристор включается/выключается по сигналу ангела зажигания оптопары.
Тиристор: Тиристор представляет собой полупроводниковый переключатель и состоит из трех выводов: анода, катода и затвора. Когда на клемму затвора подается положительный сигнал, этот тиристор находится во включенном состоянии. Изменяя этот сигнал затвора, тиристор можно легко включить или выключить.
Нагрузка: Это в основном система питания с тиристорным управлением, и любой тип нагрузки может подключаться на стороне выхода. Здесь мы будем проверять эту систему, подключив резистивную нагрузку, значит, мы будем подключать сюда лампу.
Принцип работы системы питания с тиристорным управлением для однофазного асинхронного двигателя Эта система питания с тиристорным управлением работает по принципу изменения угла включения тиристора. Когда угол открытия изменяется, мощность изменяется. Эта система имеет два переключателя: один для включения этой системы и один для переключателя изменения угла стрельбы. Эта система питается напрямую от источника питания wapda, и мы будем проверять эту систему, проверяя яркость выходной лампы. Когда эта система включена и нажат переключатель угла открытия, компаратор сравнивает два входа и подает сигнал на микроконтроллер. Микроконтроллер, в котором с помощью языка программирования устанавливается время задержки угла открытия, а затем микроконтроллер подает задержанный сигнал на оптопару, после чего оптопара дает сигнал запуска на тиристор. В зависимости от этого угла открытия тиристор включается или выключается, а затем этот тиристор включается или выключается на выходной нагрузке. Угол открытия изменяется путем изменения времени задержки, а при изменении времени задержки изменяется выходная мощность. Выходная мощность обратно пропорциональна времени задержки, т.е. когда задержка увеличивается, выходная мощность уменьшается. Здесь мы бы проверили эту систему, изменив угол стрельбы. При изменении угла освещения изменяется выходная мощность, а затем изменяется и яркость лампы.
- Система питания с тиристорным управлением может использоваться для управления реактивной мощностью асинхронного двигателя.
 Управляя реактивной мощностью двигателя, мы можем легко изменить скорость двигателя.
Управляя реактивной мощностью двигателя, мы можем легко изменить скорость двигателя. - Эта система может использоваться для управления яркостью выходных ламп.
- Эту систему также можно использовать для управления скоростью двигателей постоянного тока.
- Эта система может использоваться в синхронных генераторах для изменения возбуждения обмотки возбуждения генератора. Управляя возбуждением возбуждения, можно управлять выходным напряжением синхронного генератора.
- С помощью этой системы можно повысить производительность и эффективность промышленного оборудования.
Введите адрес электронной почты, чтобы подписаться на этот блог и получать уведомления о новых сообщениях по электронной почте.
Адрес электронной почты
Управление скоростью асинхронного двигателя с контактными кольцами с помощью тиристорного инвертора
ScienceDirectКорпоративный входВход/регистрация
Просмотр PDF
- Доступ через вашего учреждения
Том 11, выпуск 4, июль 1975 г. , страницы 419-4900, IN /10.1016/0005-1098(75)
-6Получить права и содержание
В данной статье описана схема регулирования скорости с обратной связью для асинхронного двигателя с контактными кольцами. Регулирование скорости достигается за счет рекуперации мощности скольжения с помощью устройств статической мощности. Рассмотрена конструкция контроллеров. Приводятся экспериментальные результаты, которые сравниваются с аналитическими результатами.
Ссылки (11)
- A.E. Fitzgerald et al.
Электрические машины
(1952)
- W. Shepherd и др.
Восстановление мощности скольжения в асинхронном двигателе с помощью тиристорного инвертора
IEEE Trans. Промышленность и общее применение
(1969)
- A. Lavi et al.
Регулирование скорости асинхронного двигателя со статическим инвертором в роторе
IEEE Trans. Силовые аппараты и системы
(1966)
- П. Н. Miljanic
Проходной инвертор и его применение для управления скоростью асинхронных машин с фазным ротором
IEEE Trans. Силовые аппараты и системы
(1968)
- Б.Д. Бедфорд и др.
Принципы инверторных схем
(1964)
В полной текстовой версии этой статьи есть дополнительные ссылки.
Конструкция микропроцессорного рекуператора
1994, Электрические машины и энергосистемы
Улучшенный алгоритм прямого цифрового управления для реализации микропроцессора
1982, IEEE Транзакции на автоматическом контроле
Статья
35.. решеток ДНК
Applied Materials Today, Volume 2, 2016, pp. 7-16
ДНК использовалась в качестве материала для построения сложных наноструктур. Разветвленные молекулы ДНК могут быть склеены друг с другом за счет сцепления липких концов, что обеспечивает путь, определяющий иерархическую самосборку одно-, двух- и трехмерных периодических решеток.
Плитки ДНК обеспечивают специфические сайты прикрепления и могут привести к пространственно расположенным массивам наночастиц или макромолекул с точностью до нанометра. В этом обзоре обсуждается происхождение и использование различных плиток ДНК для построения решеток ДНК более высокого порядка, которые можно использовать в качестве каркасов для размещения внешних гостей. Кроме того, обсуждается разработка ДНК-оригами и матриц.Исследовательская статья
Внедрение асинхронной машины с двойным питанием в электромобиль
Energy Procedia, том 36, 2013 г., стр. 1076-1084
Данная работа направлена на изучение и контроль трансмиссии электромобиля основанная на асинхронной машине с двойной подачей (DFIM), силовая структура этой машины и применяемая стратегия управления позволяют работать в широком диапазоне изменения скорости для обоих приложений: двигателя и рекуперации. Поэтому мощность машины может достигать удвоенной номинальной мощности. После моделирования различных частей трансмиссии выполняется численное моделирование в MATLAB/Simulink.
Результаты показывают хорошие характеристики векторного управления и структуры мощности, подаваемой на DFIM.Исследовательская статья
Диагностика штанговых насосов на основе генерирующих динамометрических карт
Journal of Process Control, Volume 77, 2019, стр. 76-88 полученные от штанговых насосов, которые являются важным доказательством для мониторинга рабочих состояний в современной нефтяной технике. В последнее время для удовлетворения реальных потребностей нефтяных месторождений методы компьютерной диагностики становятся полезными измерениями, помогающими инженерам контролировать скважины. Тем не менее, как собрать различные виды данных о неисправностях в скважине, всегда является загадкой для применения компьютерных методов, поскольку скважина практически не испытывает многих типов неисправных рабочих состояний. Типичным решением этой проблемы является создание альбома, содержащего ДК, собранные из разных лунок, но этот подход не учитывает различия свойств между лунками, которые могут повлиять на точность диагностики.
Чтобы решить эту сложную проблему, в данной статье предлагается новый подход к созданию ДС, основанный на анализе механизма штангового насоса (ШШН) в нормальном и нескольких аварийных сценариях. Этот метод может использовать продуктивные параметры и правила эксплуатации скважины для расчета DC в различных рабочих состояниях на основе анализа динамического механизма. Впоследствии, в соответствии с данными поддержки генерации ДК, Скрытые марковские модели в рамках специально разработанной структуры используются для построения отношений между ДК и рабочими состояниями. Наконец, предлагаемый метод проверяется экспериментально с помощью продуктивных параметров многих скважин, отобранных на нефтяном месторождении, а затем в сравнительных исследованиях используются некоторые традиционные методы. Полученные результаты демонстрируют эффективность предлагаемого метода диагностики рабочего состояния штанговых насосов.Исследовательская статья
Молекулярное клонирование, прокариотическая экспрессия, очистка, структурные исследования и функциональные последствия белка теплового шока 70 (Hsp70) из
Rutilus frisii kutumInternational Journal of Biological Macromolecules, Volume 108, pp 2.
798-807Был идентифицирован, клонирован, экспрессирован, очищен и выявлен его функциональные характеристики. Трехмерная структура Hsp70 из Rutilus kutum был сконструирован с использованием кристаллической структуры E. coli Hsp70 в качестве матрицы с идентичностью последовательности 47%. Анализ активности АТФазы in vitro через 60 минут. Гидролиз АТФ очищенного рекомбинантного Hsp70 (8 мкМ) был улучшен за счет связывания с денатурированной термически люциферазой (3 мкМ) примерно в 2,5 раза по сравнению со связыванием одного Hsp70. На основании результатов было обнаружено, что очищенный шаперон Hsp70 был способен значительно подавлять индуцированную нагреванием агрегацию люциферазы за счет связывания с кошапероном DnaJ (5 мкМ) более чем на 70% через 10 минут при 42 °C. Кроме того, комплекс Hsp70 DnaJ улучшал рефолдинг люциферазы, подвергшейся тепловому шоку, почти на 40% после 60 минут при 25 °C. Был сделан вывод, что белок Hsp70 из Rutilus frisii kutum играет критическую роль в предотвращении индуцированной нагреванием агрегации люциферазы, и рефолдинг денатурированной нагреванием люциферазы строго зависел от активности Hsp70, таким образом, этот белок потенциально может быть использован для улучшения функциональных свойств люциферазы в различных Приложения.
Исследовательская статья
Развертываемые механизмы, сконструированные путем соединения ортогональных звеньев Брикара, 8R или 10R одноконтурных звеньев с использованием S-образных шарниров
Механизм и теория машин, том 120, 2018, стр. 178-191
В этой статье предлагается новый метод построения семейства многоконтурных развертываемых механизмов с чрезмерными ограничениями путем соединения ортогональных одноконтурных связей с использованием сферических (С) суставы. Ортогональное одноконтурное соединение относится к соединению с четным числом идентичных звеньев с ортогональными вращающимися (R) осями шарнира и без смещения. Получаются два типа многоконтурных механизмов, в том числе параллельные механизмы (PM) и механизмы с петлевой связью (LCM) путем соединения ортогональной рычажной связи Брикара, 8R или 10R рычажных платформ. Механизмы, построенные с помощью ортогональных связей Брикара, имеют только одну степень свободы (DOF). Рассчитан объем ПМ, что свидетельствует о высоком соотношении диаметра в походном и развернутом положении механизмов без учета помех звена.
Механизмы, разработанные с использованием ортогональных звеньев 8R или 10R, имеют несколько режимов движения и могут переключаться между различными режимами через особые положения. Наконец, метод был распространен на PM и LCM, состоящие из петель, оси двух соседних R суставов не перпендикулярны друг другу.Исследовательская статья
Решающее влияние воды и сорастворителя на фармацевтические характеристики Liqui-Pellet
Advanced Powder Technology, Volume 31, Issue 5, 2020, pp. быть пероральной лекарственной формой следующего поколения. В отличие от своего предшественника, жидкого твердого состава, он имеет высокую коммерческую целесообразность. Liqui-Pellet использует систему Liqui-Mass, позволяющую преодолеть некоторые из критических недостатков технологии жидких твердых тел, которые сохранялись более двух десятилетий. Эти недостатки включают плохую текучесть, плохую прессуемость и невозможность введения больших доз без того, чтобы продукт был слишком тяжелым и громоздким для проглатывания.
Исследование является продолжением предыдущей работы над Liqui-Pellet. Чтобы сделать эту новую систему пероральной доставки коммерческим продуктом, целесообразно дополнительно понять параметры, влияющие на скорость высвобождения лекарственного средства. Двумя основными параметрами, влияющими на исследуемую скорость растворения, являются содержание воды и жидкого носителя (Tween 80). Установлено, что снижение содержания воды (с 8,62 мл до 4,76 мл, что составляет 1,9мл/0,95 мл на 20 г API и вспомогательных веществ) и увеличение концентрации Tween 80 (с 28 % масс./масс. до 32 или 36 % масс./масс.) в напроксене Liqui-Pellet приводит к увеличению скорости высвобождения лекарственного средства; однако существует предел того, сколько воды и Tween 80 можно использовать. За пределами этого предела состав не сможет производить Liqui-Pellet из-за агломерации. Предел диапазона содержания грануляционной жидкости и жидкого носителя зависит друг от друга. В успешной рецептуре, в которой формируются Liqui-Pellets, превосходные свойства текучести, устойчивость к ломкости и узкое распределение по размерам делают его идеальным для коммерческого производства. СЭМ Liqui-Pellet показывает гладкую поверхность, которая идеально подходит для нанесения покрытия. Твердофазный анализ с помощью XRPD и DSC показал ожидаемую пониженную кристалличность лекарственного средства.
- ☆
Первоначальная версия этого документа не была представлена ни на одном заседании МФБ. Он был рекомендован к публикации в исправленном виде помощником редактора Х. А. Спангом III.
Copyright © 1975 Опубликовано Elsevier Ltd.0002 Quick filters
File type
All file typesPDFZIP
Latest update
All dates
Served country/regionWorldwideAfricaAsiaEuropeNorth AmericaOceaniaSouth AmericaAfghanistanAlbaniaAlgeriaAndorraAngolaAntigua and BarbudaArgentinaArmeniaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBhutanBoliviaBosnia and HerzegovinaBotswanaBrazilBruneiBulgariaBurkinaBurma (Myanmar)BurundiCambodiaCameroonCanadaCape VerdeCentral African RepublicChadChileChinaColombiaComorosCosta RicaCroatiaCyprusCzech RepublicDemocratic Republic of CongoDenmarkDjiboutiDominicaDominican RepublicEast TimorEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFijiFinlandFranceGabonGambiaGeorgiaGermanyGhanaGreeceGrenadaGuatemalaGuineaGuinea-BissauGuyanaHaitiHondurasHungaryIcelandIndiaIndonesiaIraqIrelandIsraelItalyIvory ПобережьеЯмайкаЯпонияИорданияКазахстанКенияКирибатиКувейтКыргызстанЛаосЛатвияЛесотоЛиберияЛивияЛихтенштейнЛит uaniaLuxembourgMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMauritaniaMauritiusMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMoroccoMozambiqueNamibiaNauruNepalNetherlandsNew ZealandNicaraguaNigerNigeriaNorwayOmanPakistanPalauPanamaPapua New GuineaParaguayPeruPhilippinesPolandPortugalQatarRomaniaRussian FederationRwandaSaint Kitts and NevisSaint LuciaSaint Vincent and the GrenadinesSamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth KoreaSpainSri LankaSurinameSwazilandSwedenSwitzerlandTaiwanTajikistanTanzaniaThailandTogoTongaTrinidad and TobagoTunisiaTurkeyTurkmenistanTuvaluUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUruguayUzbekistanVanuatuVatican CityVenezuelaVietnamYemenZambiaZimbabwe
Show only products supplied by ST
Please enter your desired search query and search again
Quick filters
Served country/regionWorldwideAfricaAsiaEuropeNorth AmericaOceaniaSouth AmericaAfghanistanAlbaniaAlgeriaAndorraAngolaAntigua and BarbudaArgentinaArmeniaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBhutanBoliviaBosnia and HerzegovinaBotswanaBrazilBruneiBulgariaBurkinaBurma (Myanmar)BurundiCambodiaCameroonCanadaCape VerdeCentral African RepublicChadChileChinaColombiaComorosCosta RicaCroatiaCyprusCzech RepublicDemocratic Republic of CongoDenmarkDjiboutiDominicaDominican RepublicEast TimorEcuadorEgyptEl SalvadorEquatorial ГвинеяЭритреяЭстонияЭфиопияФиджиФинляндияФранцияГабонГамбияГрузияГерманияГанаГрецияГренадаГватемалаГвинеяГвинея-БисауГайанаГаитиГондурасВенгрияИсландияИндияИндонезияИракИрландияИзраильИталияБерег Слоновой КостиЯмайкаЯпонияИорданияКазахстанКенияКирибатиКувейтКыргызстанЛаосЛаосЛатвия yaLiechtensteinLithuaniaLuxembourgMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMauritaniaMauritiusMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMoroccoMozambiqueNamibiaNauruNepalNetherlandsNew ZealandNicaraguaNigerNigeriaNorwayOmanPakistanPalauPanamaPapua New GuineaParaguayPeruPhilippinesPolandPortugalQatarRomaniaRussian FederationRwandaSaint Kitts and NevisSaint LuciaSaint Vincent and the GrenadinesSamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth KoreaSpainSri LankaSurinameSwazilandSwedenSwitzerlandTaiwanTajikistanTanzaniaThailandTogoTongaTrinidad and TobagoTunisiaTurkeyTurkmenistanTuvaluUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUruguayUzbekistanVanuatuVatican CityVenezuelaVietnamYemenZambiaZimbabwe
Показать только продукты, поставляемые ST
Однофазный асинхронный двигатель переменного тока — это бесщеточный двигатель с одной катушкой статора.
Наши продукты и решения
ST предлагает современные надежные устройства, такие как симисторы, тиристоры и переключатели переменного тока, а также микроконтроллеры, позволяющие регулировать скорость двигателя различными способами, в зависимости от стоимости и требований к производительности конечного продукта. заявление.
Однофазные двигатели переменного тока, основные сведения
Однофазный двигатель с обмоткой является простейшим типом двигателя переменного тока , но для него требуется пусковой механизм. Это приводит к трем основным типам однофазных асинхронных двигателей: с расщепленными полюсами , с расщепленной фазой и конденсаторные двигатели .
Пуск двигателя может быть обеспечен за счет конструкции статора с двумя обмотками, основной и вспомогательной катушкой. Подключение конденсатора последовательно с вспомогательной обмоткой означает, что ток, протекающий через обе катушки, не совпадает по фазе.
Именно эта разность фаз создает крутящий момент для запуска вращения.Электролитический пусковой конденсатор используется для достижения наилучших фазовых углов между пусковой и основной обмотками и отключается от пусковой цепи, когда скорость двигателя достигает примерно 75% от полной нагрузки. Он предназначен для кратковременной работы , и его использование дольше, чем необходимо, может вызвать проблемы, поэтому необходим точный контроль .
Основные типы Асинхронные двигатели с экранированными полюсамиВ двигателе с экранированными полюсами используется с короткозамкнутым ротором и обычно составляет от 1/20 до 1/6 лошадиных сил для небольших двигателей. Он имеет дополнительные обмотки в каждом углу статора, называемые теневыми обмотками. Они не связаны, но генерируют ток из индуцированного поля. Это подавляет поле, создавая низкий крутящий момент, чтобы заставить двигатель двигаться.
Двухфазные асинхронные двигатели
Двухфазные асинхронные двигатели имеют две обмотки , рабочую обмотку и вторичную пусковую обмотку, и обычно имеют мощность до 1/3 л.
с. для привода лопастей потолочного вентилятора, баков стиральных машин , двигатели вентиляторов для нефтяных печей и небольшие насосы.Пусковая обмотка с более высокой мощностью заставляет двигатель двигаться со скоростью от 75 до 80% от его скорости, а затем центробежный переключатель используется для переключения на менее мощную рабочую обмотку для экономии энергии.
Прочие соображения
Однофазные двигатели переменного тока чрезвычайно распространены во всех сферах жизни. Подавляющее большинство двигателей, питаемых от бытовой сети или сети легкой промышленности, являются однофазными. Одним из ключевых моментов является правильное определение размера двигателя для приложения . Если двигатель не создает достаточного крутящего момента для конструкции, он всегда будет работать на максимуме, создавая большую нагрузку на компоненты и выделяя слишком много тепла. Точно так же, если двигатель слишком большой, он не будет работать эффективно и будет тратить энергию.
Однако однофазные источники питания можно использовать для создания трехфазного источника питания переменной частоты для привода трехфазного асинхронного двигателя.
Привод однофазного асинхронного двигателя также может отображать пульсации крутящего момента , которые представляют собой регулярное изменение выходного крутящего момента, а разница между максимальным и минимальным значением часто выражается в процентах, чтобы подчеркнуть управляемость двигателя.
Обнаружение неисправностей в однофазных асинхронных двигателях обычно требуются датчики , так как недостаточно информации для реализации более сложных алгоритмов без датчиков.
All resources
Expand all categories
Application Notes (5 of 6)
Resource title Version Latest update PDF AN4607 Basics on the структура тиристора (SCR) и его применение
2,0 13 сентября 2018 13 сентября 2018
AN4607 Основы на Thyristor (SCR) и его применение 2,0903
12 сент. 2022 г. 12 сент. 2022 г.
AN5789 Рассмотрение схемы начальной загрузки для драйверов затворов 1.0
PDF AN4363 Как выбрать Triac, ACS или ACST, подходящий для вашего приложения
2.1 15 января 2019 г. 15 января 2019 г. 2.1
PDF AN3168 Non-insulated SCR / Triac control circuits
1.2 13 Sep 2018 13 Sep 2018
AN3168 Non-insulated SCR / Triac control circuits 1.2
PDF AN5765 STSPIN32F0x low voltage brushless motor controller layout guidelines
1. 012 Sep 2022 12 Sep 2022
AN5765 STSPIN32F0x low voltage brushless motor controller layout guidelines 1.0
PDF AN303 Тиристоры и симисторы: ток фиксации
3,4 16 января 2019 г. 16 Jan 2019
AN303 Thyristors and TRIACs: latching current 3.4
Load more
Flyers (1)
Resource title Version Latest update PDF Триаки серии T: защита от помех и коммутация для устройств переменного тока
3. 018 декабря 2017 г. 18 декабря 2017 г.
Triacs T TRIACS: иммунитет и коммутация, обусловленные приборами AC 3,0
Нагрузка больше
Все аппаратные инструменты. техническое описание и примечания по применению
Лучшие результаты (6)
Часть Модель ECAD Производитель Описание Даташит Скачать Купить Часть 3P4J(0)-Z-E2-AZ Ренесас Электроникс Корпорейшн Тиристоры CR3PM-12G-AS#B00 Ренесас Электроникс Корпорейшн Тиристоры org/Product»>
CR3PM-12G-AK#B00 Ренесас Электроникс Корпорейшн Тиристоры CR8PM-12A#P01 Ренесас Электроникс Корпорейшн Тиристоры CR3PM-12G-AT#B00 Ренесас Электроникс Корпорейшн Тиристоры 5P4J-ЗК-Э2-АЗ Ренесас Электроникс Корпорейшн 906:40 Тиристоры тиристор%20привод%203%20фаза%20пост.
тока%20двигатель%20скорость%20управление Листы данных Context SearchЛист данных по каталогу MFG и тип ПДФ Теги документов 2002 — Триак to220
Реферат: Тиристор симистор 400в 16а симистор 25а 600в симистор 600в 25а симистор 400в 25а симистор 3а 600в симистор 10а 400в тиристор 3а 600в тиристор к220
Текст: Нет доступного текста файла
ОригиналPDF ET013 ET015 ET020 SLA0201 STA203A STA221A TF321M TF321M-А TF321S TF341M Симистор до220 Тиристор симистор 400в 16а СИМИСТОР 25а 600В симистор 600в 25а симистор 400в 25а Симистор 3а 600в симистор 10а 400в тиристор 3а 600в Тиристор до220 2008 — Анод затвора тиристора
Реферат: 3-фазная схема запуска тиристора, быстрые тиристорные схемы управления затвором на 200 А
Текст: Нет доступного текста файла
ОригиналPDF 108мм ПГ408 тиристор с анодным затвором Трехфазная схема зажигания тиристора схемы управления затвором на быстродействующем тиристоре 200А 3-фазный тиристорный привод постоянного тока pgh25016am 600A тиристор SCR демпфер ДЛЯ ТРЕХФАЗНОГО МОСТОВОГО ВЫПРЯМИТЕЛЯ цепь зажигания тиристора Цепь управления тиристорным затвором на 200А 6 схема драйвера тиристора org/Product»>
2011 — Анод затвора тиристора
Резюме: нет абстрактного текста
Текст: Нет доступного текста файла
ОригиналPDF 5×1014 1×107 УВАЖАЕМЫЙ0000112) тиристор с анодным затвором 1999 — Тиристор 470 А
Резюме: тиристорный эквивалент 1k 4-контактный резисторный массив Тиристор T 25 тиристор направляющий тиристор конденсатор 23 мкФ MITSUBISHI GATE ARRAY PULSE тиристор SA04
Текст: Нет доступного текста файла
ОригиналPDF АСА100) Тиристор 470 А тиристорный эквивалент 1k 4-контактный массив резисторов Тиристор Т 25 руководство по тиристору тиристор конденсатор 23 мкФ МАССИВ ВОРОТ MITSUBISHI ИМПУЛЬСНЫЙ тиристор СА04 906:40 ГТО тиристор
Реферат: 40A GTO тиристор GTO тиристор драйвер тиристор инвертор схема THYRISTOR GTO GTO тиристор Примечания по применению gto Gate Drive схема vvvf управление скоростью 3-фазного асинхронного двигателя GTO привод затвора Теория, конструкция и применение снабберных цепей
Текст: Нет доступного текста файла
ОригиналPDF org/Product»>
1998 — тиристор лтт
Реферат: SIEMENS THYRISTOR Тиристоры Siemens Тиристор EUPEC LTT Преобразователь постоянного тока в переменный с помощью тиристора РАЗРЫВНОЙ ДИОД Плата управления тиристором Защита тиристора абстрактный срок службы тиристора Преобразователь переменного тока в постоянный с помощью тиристора
Текст: Нет доступного текста файла
ОригиналPDF D-
тиристор лтт СИМЕНС ТИРИСТОР Тиристоры Сименс Тиристор EUPEC LTT преобразователь постоянного тока в переменный на тиристоре ОБРЫВНОЙ ДИОД тиристор платы управления тиристорная защита реферат срок службы тиристора преобразователь переменного тока в постоянный на тиристоре 906:40фгт313
Реферат: транзистор fgt313 SLA4052 RG-2A диод SLA5222 fgt412 RBV-3006 FMN-1106S SLA5096 диод ry2a
Текст: Нет доступного текста файла
ОригиналPDF 2SA1186 2SC4024 2SA1215 2SC4131 2SA1216 2SC4138 100 В переменного тока 2SA1294 2SC4140 фгт313 транзистор фгт313 SLA4052 Диод РГ-2А SLA5222 фгт412 РБВ-3006 ФМН-1106С SLA5096 диод ry2a org/Product»>
2015 — МОП-управляемый тиристор
Аннотация: срок службы тиристора
Текст: Нет доступного текста файла
ОригиналPDF 2001 — ТР250-180У
Реферат: TS600-170 «Power over LAN» TR250-145 REBD TS250-130-RA TSL250-080
Текст: Нет доступного текста файла
ОригиналPDF 2002 — микросхема драйвера scr для трехфазного выпрямителя
Реферат: ОПТОПАРА тиристорный драйвер затвора тиристора ic SCR TRIGGER PULSE схема ОПТОПАРА для тиристорного затвора однофазный полумостовой управляемый выпрямитель scr Оптопара с тиристором SCR IC управления фазой SCR TRIGGER PULSE драйвер scr для выпрямителя 3 фазы 6 выход
Текст: Нет доступного текста файла
ОригиналPDF org/Product»>
тиристор tt 500 n 16
Реферат: тиристорный выпрямитель с фазовым управлением тиристорный т 500 н 1800 однофазный тиристорный управляемый выпрямитель тиристорный тт 121 трехфазный мостовой полностью управляемый выпрямитель тиристорный т 500 н 18 ЭКОНОПАК диод w3 b6 диод
Текст: Нет доступного текста файла
ОригиналPDF 2004 — Драйвер ворот scr ic
Резюме: микросхема драйвера scr для выпрямителя 3-фазная микросхема драйвера для тиристора ОПТОПАРА для тиристорного затвора трехфазного тиристорного моста, управляющая микросхемой SCR ТРИГГЕРНАЯ ИМПУЛЬСНАЯ схема ОПТОПАРА, запускающая тиристор scr ОПТОПАРА, тиристорная схема управления тиристором
Текст: Нет доступного текста файла
ОригиналPDF 1998 — 3-фазный мостовой полностью управляемый выпрямитель
Резюме: tt 60 n 16 kof пресс-пакет igbt однофазный полностью управляемый выпрямитель тиристор управления ic с измерением тока прерыватель постоянного тока с помощью тиристора трехфазный выпрямитель тиристорный мост спецификация обратной проводимости тиристор асимметричный тиристор тиристор tt 121
Текст: Нет доступного текста файла
ОригиналPDF org/Product»>
2003 — EUPEC tt 162 n 16
Реферат: тиристор tt 162 n тиристорный модуль большой мощности bsm 25 gp 120 igbt модуль bsm 100 gb 60 dl ДИСК ТИРИСТОРНЫЙ диод EUPEC tt 105 N 16 тиристорный тиристорный модуль IGBT FZ
Текст: Нет доступного текста файла
ОригиналPDF кука-2003-вдыхание EUPEC тт 162 н 16 тиристор тт 162 н тиристор большой мощности модуль бсм 25 гп 120 igbt модуль bsm 100 гб 60 дл ДИСКОВЫЙ ТИРИСТОР диод ЭУПЭК тт 105 Н 16 тиристор большой мощности IGBT-модуль ФЗ 906:40 2001 — ТИРИСТОР
Резюме: применение тиристора тиристор 10A тиристор примечания по применению примечания по применению тиристор DATASHEET тиристор высокой мощности тиристор eupec с фазовым управлением
Текст: Нет доступного текста файла
ОригиналPDF 119мм 05ИТСМ ТИРИСТОР применение тиристора тиристор 10А примечания по применению тиристора заметки по применению тиристор ТЕХНИЧЕСКОЕ ОПИСАНИЕ фазовый контроль тиристор большой мощности тиристор управления фазой Eupec 906:40 org/Product»>
тиристор тт 162 н
Реферат: быстродействующий тиристор 1000В тиристор tt 162 n 16 IGBT модуль FZ 400 тиристор td 162 n тиристор TT 162 Тиристор КОНФИГУРАЦИЯ ВЫВОДОВ тиристор tt 500 n 16 THYRISTOR H 1500 тиристор 162
Текст: Нет доступного текста файла
ОригиналPDF Метод испытания тиристоров eupec
Реферат: СИМЕНС ТИРИСТОРЫ ВПТ СИМЕНС ТИРИСТОРЫ тиристор для HVDC для 500кВ ИМПУЛЬСНЫЙ тиристор автомобильный тиристор Тиристор ВНПТ LTT тиристорный преобразователь проектирование цепи зажигания Схемы применения тиристоров
Текст: Нет доступного текста файла
ОригиналPDF D-81541 D-59581 D- - метод тестирования тиристоров eupec SIEMENS hvdc ТИРИСТОРЫ СИМЕНС ТИРИСТОР тиристор для HVDC на 500кВ ИМПУЛЬСНЫЙ тиристор автомобильный тиристор ОВПТ тиристор лтт тиристорный преобразователь, проектирующий схему зажигания Схемы применения тиристоров
org/Product»>
2001 — ТР250-180У
Реферат: Тиристор SiBar ТСЛ250-080 ТСВ250-130 «Питание по локальной сети» ТР600-150-РА ТР600-150 ТР250-145 ТР250-120 ГР-974
Текст: Нет доступного текста файла
ОригиналPDF Тиристор обратной проводимости
Реферат: CRD5CM Тиристор to220 Тиристор-регулятор CRD5C Тиристор обратной проводимости Gate Turn-off Тиристор to220
Текст: Нет доступного текста файла
ОригиналPDF 2010 — Ренесас О-220 Тиристор обратной проводимости CRD5CM Тиристор до220 тиристорный регулятор CRD5C тиристор с обратной проводимостью Запорный тиристор to220 906:40 2002 — Тиристор EUPEC
Реферат: Тиристор EUPEC LTT тиристор ltt все типы тиристоров и схема Infineon процесс рассеивания мощности LTT тиристор тиристор срок службы тиристор использование энергосистемы 6-дюймовый тиристор для HVDC ВЫСОКОГО НАПРЯЖЕНИЯ ТИРИСТОРА
Текст: Нет доступного текста файла
ОригиналPDF D-59581 D-81541 Тиристор EUPEC Тиристор EUPEC LTT тиристор лтт все типы тиристоров и схемы Процесс распространения мощности Infineon LTT тиристор срок службы тиристора тиристорное использование энергосистемы 6-дюймовый тиристор для HVDC ВЫСОКОВОЛЬТНЫЙ ТИРИСТОР 906:40 org/Product»>
тиристор tt 162 n 12
Реферат: тиристор тт 162 н тиристор ТТ 46 н тиристор ТТ 162 асимметричный тиристор тиристор тт 25 тиристор ТД 25 н дд 55 н 14 силовой блок тиристор тт 105 н 16 силовой блок тт 162
Текст: Нет доступного текста файла
ОригиналPDF кука-2006-де-вдыхание тиристор тт 162 н 12 тиристор тт 162 н тиристор ТТ 46 Н тиристор ТТ 162 несимметричный тиристор тиристор тт 25 тиристор ТД 25 Н силовой блок дд 55 н 14 тиристор тт 105 н 16 силовой блок тт 162 906:40 Westcode тиристор
Реферат: WESTCODE TB 1KHZ тиристор R216Ch22FJO тиристор T 95 F 700 SM12CXC190 тиристор 910 тиристор h 250 tb 16 westcode диоды S встречно-параллельный тиристор
Текст: Нет доступного текста файла
OCR-сканированиеPDF 151JL Тиристор Весткод WESTCODE ТБ тиристор 1 кГц Р216Ч22ФЖО тиристор Т 95 Ф 700 СМ12СХС190 тиристор 910 тиристор h 250 tb 16 весткод диоды S Антипараллельный тиристор 906:40 org/Product»>
ОПТОПАРА тиристорная
Реферат: тиристорный контактор тиристор с использованием схемы пересечения нуля автомобильный тиристор все типы тиристоров и приложений Оптопара с тиристором модуль переключения тиристоров с пересечением нуля код тиристора BR6000T br6000
Текст: Нет доступного текста файла
ОригиналPDF МЭК60439-1/2/3: D-81617 105/В3 ОПТОПАРА тиристорная тиристорный контактор тиристор с использованием схемы пересечения нуля автомобильный тиристор все типы тиристоров и приложения Оптопара с тиристором Модуль коммутационных тиристоров с переходом через нуль код тиристора BR6000T 6000 рублей 906:40 однофазный мостовой полностью управляемый выпрямитель
Резюме: EUPEC DD 105 N 16 L однофазный полностью управляемый выпрямитель 3-фазная схема выпрямителя тиристорный
Текст: Нет доступного текста файла
ОригиналPDF org/Product»>
1999 — тиристор Т10
Резюме: нет абстрактного текста
Текст: Нет доступного текста файла
ОригиналPDF 120 мА 180 мА тиристор Т10 Предыдущий 1 2 3 … 23 24 25 Следующая
Сравнительный анализ производительности тиристора и IGBT на основе мягких стартеров на основе тиристора и IGBT
Содержание таблицы
признание
Abscract
Список рисунок
Список таблиц
ГЛАВА 1
Введение
1.1 ПРОИЗВОДСТВО ПРОИЗВОДСТВОГЛАВА 1
Введение
1.1.0926 1.2 Обзор литературы
Цели
МетодологияГлава 2
ТЕОРЕТИЧЕСКАЯ ОСНОВА
2.1 Асинхронный двигатель
2.1.1 Принцип работы
2.2 Пуск асинхронного двигателя
2.2.1 Пускатель по схеме «треугольник 2» 90 Пускатель 90 9026
2.2.26 .3 Метод пуска автотрансформатора
2.2.4 Стартер сопротивления ротора
2. 2.5 Твердотельный пуск
2.3 Устройства плавного пуска
2.3 Устройства силовой электроники
2.3.1 Тиристор
2.3.1 Биполярный транзистор с изолированным затвором (IGBT)
2.4 Контроллеры напряжения переменного тока (регулятор переменного тока)
2.4.1 Управление фазой тиристора
2.5 Устройство плавного пуска с нагрузкой R-L
2.6 Параметр производительности
2.7 Трехфазное устройство плавного пуска
2.8 Цепи зажигания
2.8.1 Использование линейного сигнала
2.8.2 Использование управление косинусом:
2.9 Основы Matlab/Simulink
2.9.1 Matlab
2.9.2 Simulink
2.9.3 Списки используемых блоков
2.9.4 Характеристики тиристоров
2.9.5 Характеристики IGBTГлава 3
0926 3.1 Тиристор с нагрузкой R-L
3.2 Модель Simulink IGBT с RL Load
3.3 Сравнительная производительность
3.4 Модель Simulink трехфазного индукционного двигателя с ThyristorЗаключение и рекомендация
Будущие улучшения
.
in dieser Leseprobe nicht enthaltenСПИСОК РИСУНКОВ
Рис. 2.1: Типовой асинхронный двигатель переменного тока с расщепленной фазой
Рис. 2.2: Эквивалентная схема трехфазного асинхронного двигателя
Рис. 2.3: Блок-схема устройства плавного пуска
Рис. 2.4: Структура на физическом и электронном уровне и условное обозначение
Рис. 2.5: ВАХ тиристора
Рис. 2.6: Статические характеристики IGBT
Рис. 2.7: Регулятор напряжения переменного тока
Рис. 2.8: Однофазный двухполупериодный регулятор напряжения переменного тока с нагрузкой RL
Рис. 2.9: Требования к управляющему сигналу
Рис. 2.10: Формы напряжения питания, тока нагрузки, напряжения и напряжения на выходе0003
Рис. 2.11: Блок-схема трехфазного устройства плавного пуска асинхронного двигателя
Рис. 2.12: Блок-схема цепи зажигания
Рис. 2.13: Основная идея схемы рампы.
Рис. 2.14: Блок-схема косинусоидальной схемы генератора импульсов
Рис.
2.15: Форма волны напряжения и тока нагрузки для нагрузки RL с тиристоромРис. 2.16: Характеристики входного и выходного напряжения с IGBT
Рис. RL Load
Рис. 3.2: Косинусоидальная схема запуска тиристора и IGBT
Рис. 3.4: Импульсы зажигания тиристора и IGBT для α=450 .
Рис. 3.5: Выходное напряжение и ток тиристора для α=450.
Рис. 3.6: Входное напряжение, выходное напряжение и ток R-L нагрузки с тиристором α=450.
Рис. 3.7: Модель Simulink IGBT с нагрузкой RL
Рис. 3.8: Выходное напряжение и ток IGBT для α=450.
Рис. 3.9: Входное напряжение, выходное напряжение и ток R-L нагрузки с IGBT α=450.
Рис. 3.10: Сравнение THD тиристора и IGBT для различных углов открытия
Рис. 3.11: Сравнительная столбчатая диаграмма коэффициента мощности тиристора и IGBT для различных углов открытия
СПИСОК ТАБЛИЦ
Таблица 2.1: Таблицы блоков, использованных в моделировании
Таблица 3.1: Данные наблюдений THD и PF для IGBT и тиристоров
БЛАГОДАРНОСТЬ
Мы хотели бы выразить нашу глубокую благодарность нашему руководителю проекта Эр.
Дурга Прасад Оли. Его ценные советы, предложения, наставления и совместный надзор были одним из очень мотивирующих факторов для уточнения и формирования нашего проекта. Надзор и поддержка, которые он оказал, действительно помогли нам в продвижении и плавности нашего проекта. Сотрудничество очень ценится.Мы выражаем особую благодарность электрическому отделу и всему его персоналу за создание хороших условий и активное сотрудничество в реализации этого проекта. Мы также хотели бы поблагодарить нашего начальника отдела Ер. Прадип Прасад Сах и DHOD, Er. Дурга Прасад Оли за его совместные усилия по предоставлению нам хорошо оборудованной лаборатории и сложного оборудования. Без их помощи и поддержки наш проект столкнулся бы со многими трудностями.
И последнее, но не менее важное: мы хотели бы поблагодарить всех наших коллег, друзей, старших за то, что они щедро посвятили свое время и мудрые идеи, чтобы помочь нам с проектом.
РЕФЕРАТ
В этом проекте оцениваются характеристики привода с расщепленной фазой и трехфазного асинхронного двигателя для плавного пуска.
Предварительно систематически исследуются и сравниваются характеристики привода асинхронного двигателя с питанием от переменного напряжения для двух различных типов устройств плавного пуска; один на основе IGBT, а другой на тиристоре. Новизна работы заключается в разработке простых и гибких моделей для имитационного моделирования.В этом проекте исследуется влияние параметров машины и устройства плавного пуска на динамику запуска асинхронной машины. Ситуации могут воспроизводить реальные ситуации, возникающие на практике, например, изменение начального напряжения Vi, изменение времени пуска и значения нагрузки. В этом проекте мы исследовали взаимосвязь между полным гармоническим искажением и коэффициентом мощности IGBT и устройства плавного пуска на основе тиристора. Используя уже заданную характеристику угла огня, также оценивалось влияние начального напряжения.
Обсуждение этих результатов и выводы относительно почти оптимальных типов профилей очерчены на основе профиля напряжения и тока, подаваемого на асинхронный двигатель, времени пуска и искажения тока при изменении угла зажигания.
Глава 1 ВВЕДЕНИЕ
1.1 Предыстория проекта
С развитием сектора электроэнергетики использование электроэнергии увеличивается в различных секторах, включая промышленность и бытовые применения. Электроприводы на основе асинхронных двигателей являются наиболее широко используемыми электромеханическими системами в современной промышленности. Благодаря своей надежности, прочности, простой механической конструкции, простоте обслуживания и относительно низкой стоимости асинхронные двигатели привлекательны для использования в электрических транспортных системах нового поколения, таких как автомобили, автобусы и поезда. Из всего многообразия потребителей электроэнергии в промышленности одним из самых крупных является, без сомнения, асинхронная машина, работающая как двигатель. Помимо классического назначения асинхронной машины в качестве двигателя, в последнее время эта машина все чаще используется в качестве генератора в цепочке преобразования энергии ветра или микрогидроэнергии в электричество.
Асинхронный двигатель потребляет большой ток во время запуска и может вызвать повреждение обмоток при запуске от прямого источника питания. Для снижения пускового тока используется наиболее надежный и экономичный способ пуска в промышленном применении.
Прямые пуски асинхронных машин от сети имеют много недостатков. Пульсации крутящего момента часто велики и изменяются от положительных до отрицательных значений. Эти переходные процессы крутящего момента на валу двигателя передаются на нагрузку, что приводит к механическому износу подшипников двигателя и нагрузочных муфт. Поэтому правильное управление пусковыми токами и крутящими моментами асинхронных машин во многих случаях имеет большое значение. Кроме того, результирующие пусковые токи высоки, особенно во время первых нескольких циклов пускового переходного процесса. Эти высокие токи выдерживают двигатель и система питания, вызывая нагрев обмоток машин.
Для снижения пускового тока наиболее надежным и экономичным методом пуска в промышленности является использование устройства плавного пуска, которое снижает напряжение во время пуска и, следовательно, уменьшает пусковой ток.
Различные устройства силовой электроники, такие как SCR, IGBT, MOSFET, используются с различными технологиями плавного пуска, и здесь мы сравниваем производительность устройств плавного пуска на основе тиристоров и IGBT.
1.2 Обзор литературы
Основные идеи этого проекта были взяты из книги «Силовая электроника» Хасан М. Рашид . Как пояснили Ахмед Рияз, Атиф Икбал, Шейх Мойноддин, СК. Мойн Ахмед, Хайтам Абу-Руб в Международном журнале инженерии, науки и технологий, том 1, № 1, 2009 г.
Основная идея устройства плавного пуска асинхронного двигателя взята из книги «Учебник электротехники» Б.Л. Терея и А.К. Терея.
Различные параметры системы и производительности могут быть проанализированы на основе диссертации, представленной Чиа-Чоу Йе на тему «Отказоустойчивая работа асинхронного двигателя».
Цели
— Сравнительный анализ характеристик устройств плавного пуска асинхронных двигателей на основе тиристоров и IGBT на основе коэффициента гармоник (THD) и коэффициента мощности (PF)
Методология
— Теоретическое исследование асинхронных двигателей, устройств силовой электроники, регуляторов напряжения и программное обеспечение MATLAB.
— Проектирование схемы запуска в MATLAB simulink.
— Реализация схемы зажигания для тиристора и IGBT.
— Проверка осциллограмм выходного напряжения и тока при различном угле зажигания с нагрузкой R-L.
— Анализ полного гармонического искажения (THD) и коэффициента мощности для устройств плавного пуска на основе тиристоров и IGBT для нагрузки R-L.
— Внедрение схемы зажигания для трехфазного тока и анализ производительности устройства силовой электроники, что является хорошим выводом из вышеизложенного.Глава 2 ТЕОРЕТИЧЕСКАЯ ОСНОВА
2.1 Асинхронный двигатель
Асинхронный или асинхронный двигатель представляет собой тип двигателя переменного тока, в котором питание подается на ротор посредством электромагнитной индукции, а не через коллектор или токосъемные кольца, как в других типах двигателей. . Эти двигатели широко используются в промышленных приводах, особенно многофазные асинхронные двигатели, поскольку они прочны и не имеют щеток.
Однофазные версии используются в небольших бытовых приборах. Их скорость определяется частотой питающего тока, поэтому они наиболее широко используются в приложениях с постоянной скоростью, хотя версии с переменной скоростью, использующие приводы с переменной частотой, становятся все более распространенными.ABBILDUNG в Dieser Leseprobe Nicht Entalten
Рис. 2.1: Типичная фазовая фаза Индукционный двигатель AC
Abbildung в Dieser Leseprobe nicht entaltenfig 2.2: эквивалентный цепь трехфазного индукционного моторного мотор
2.1.1.1.1.11111111111111111111111111111111. и синхронных двигателей статор питается переменным током (многофазным током в больших машинах) и предназначен для создания вращающегося магнитного поля, которое вращается в такт колебаниям переменного тока. В синхронном двигателе ротор вращается с той же скоростью, что и поле статора. Напротив, в асинхронном двигателе ротор вращается с меньшей скоростью, чем поле статора. Поэтому магнитное поле через ротор меняется (вращается).
Ротор имеет обмотки в виде замкнутых проволочных витков. Вращающийся магнитный поток индуцирует токи в обмотках ротора, подобно трансформатору. Эти токи, в свою очередь, создают магнитные поля в роторе, которые взаимодействуют (толкаются) с полем статора. По закону Ленца направление создаваемого магнитного поля будет таким, чтобы противодействовать изменению тока через обмотки. Причиной индуцированного тока в роторе является вращающееся магнитное поле статора, поэтому, чтобы противостоять этому ротору, этот ротор начнет вращаться в направлении вращающегося магнитного поля статора, пытаясь сделать относительную скорость между ротором и вращающимся магнитным полем статора равным нулю. Чтобы индуцировались эти токи, скорость физического ротора должна быть ниже, чем скорость вращающегося магнитного поля статора (Abbildung in dieser Leseprobe nicht enthalten), иначе магнитное поле не двигалось бы относительно проводников ротора, и никакие токи не протекали бы. быть индуцированным. Когда скорость ротора падает ниже синхронной скорости, скорость вращения магнитного поля в роторе увеличивается, индуцируя больший ток в обмотках и создавая больший крутящий момент. Отношение между скоростью вращения магнитного поля с точки зрения ротора (скоростью скольжения) и скоростью вращения вращающегося поля статора называется «9».0364 скольжение ». Под нагрузкой скорость падает, а скольжение увеличивается настолько, чтобы создать достаточный крутящий момент для поворота нагрузки. По этой причине асинхронные двигатели иногда называют асинхронными двигателями. Асинхронный двигатель можно использовать в качестве асинхронного генератора, или его можно развернуть, чтобы сформировать линейный асинхронный двигатель, который может непосредственно генерировать линейное движение2.2 Пуск асинхронного двигателя
Однофазный асинхронный двигатель не запускается самостоятельно, поэтому необходимо предусмотреть пусковую цепь и связанную с ней пусковые обмотки, обеспечивающие начальное вращение в однофазном асинхронном двигателе.Нормально работающие обмотки в таком двигателе могут вызывать вращение ротора в любом направлении, поэтому пусковая цепь определяет рабочее направление.
Для небольшого однофазного двигателя с экранированными полюсами мощностью несколько ватт пуск осуществляется экранированным полюсом с витком медного провода вокруг части полюса. Ток, индуцируемый в этом витке, отстает от тока питания, создавая магнитное поле с задержкой вокруг заштрихованной части поверхности полюса. Это придает достаточный вращательный характер для запуска двигателя. Эти двигатели обычно используются в таких приложениях, как настольные вентиляторы и проигрыватели, поскольку пусковой момент очень низкий, а низкий КПД не вызывает возражений.
Многофазный асинхронный двигатель запускается самостоятельно и создает крутящий момент даже в состоянии покоя. Четыре метода запуска асинхронного двигателя: прямой пуск, реактор, автотрансформатор и звезда-треугольник. В отличие от двигателя с фазным ротором, цепь ротора недоступна, и невозможно ввести дополнительное сопротивление для пуска или управления скоростью.
2.2.1 Пускатель прямого пуска
Пускатель прямого пуска включает питание непосредственно на контакты двигателя.
Поскольку пусковой ток асинхронного двигателя может в 6-8 раз превышать рабочий ток, пускатель DOL обычно используется только для двигателей с номинальной мощностью менее 5 кВт.2.2.2 Пускатель звезда-треугольник
Это наиболее распространенная форма пускателя, используемая для трехфазных асинхронных двигателей. Он обеспечивает эффективное снижение пускового тока за счет первоначального соединения обмоток статора в звезду, что эффективно включает любые две фазы последовательно через источник питания. Пуск по схеме «звезда» снижает не только пусковой ток двигателя, но и пусковой момент. Достигнув определенной рабочей скорости, двухпозиционный переключатель меняет расположение обмотки со звезды на треугольник, после чего достигается полный рабочий крутящий момент. Такое расположение означает, что концы всех обмоток статора должны быть выведены за пределы корпуса двигателя.
2.2.3 Метод пуска с автотрансформатором
Этот метод пуска снижает пусковой ток за счет снижения напряжения при пуске.
Он может давать меньшие пусковые токи, чем схемы звезда-треугольник, но с соответствующей потерей крутящего момента. Он используется не так часто, как другие методы пуска, но имеет то преимущество, что между пускателем и двигателем требуется всего три соединительных провода.2.2.4 Стартер сопротивления ротора
Если необходимо запустить трехфазный асинхронный двигатель под нагрузкой, то обычно выбирается машина с фазным ротором. Такая машина позволяет подключить внешнее сопротивление к ротору машины через контактные кольца и щетки. При запуске сопротивление ротора установлено на максимум, но снижается по мере увеличения скорости, пока, в конце концов, оно не упадет до нуля, и машина будет работать, как если бы это была машина с ротором в клетке.
2.2.5 Полупроводниковый пуск
Полупроводниковый пускатель двигателя — это устройство, используемое с электродвигателями переменного тока для временного снижения нагрузки и крутящего момента в силовой передаче двигателя во время запуска.
Он состоит из устройств силовой электроники для снижения напряжения при запуске. Это снижает механическую нагрузку на двигатель и вал, а также электродинамические нагрузки на подключенные силовые кабели и электрическую распределительную сеть, продлевая срок службы системы.2.3 Устройства плавного пуска
Устройства плавного пуска, использующие кремниевые выпрямители (SCR), в настоящее время широко используются в промышленности. Этот метод пуска по существу позволяет контролировать напряжения, подаваемые на асинхронный двигатель, и, следовательно, управлять его крутящим моментом и ускорением машины во время ее пускового переходного процесса.
Электрические устройства плавного пуска могут использовать полупроводниковые устройства для управления протеканием тока и, следовательно, напряжением, подаваемым на двигатель. Они могут быть соединены последовательно с линейным напряжением, подаваемым на двигатель, или могут быть соединены внутри контура треугольника (Δ) двигателя, соединенного треугольником, контролируя напряжение, подаваемое на каждую обмотку.
Твердотельные устройства плавного пуска могут управлять одной или несколькими фазами напряжения, подаваемого на асинхронный двигатель, при этом наилучшие результаты достигаются при трехфазном управлении. Обычно напряжение регулируется реверсивно-параллельно включенными кремниевыми выпрямителями (тиристорами), но в некоторых случаях при трехфазном управлении управляющими элементами могут быть реверсивно-параллельно включенные тринистор и диод.Устройства плавного пуска переключателя, управляемые всеми тремя фазами, могут использовать пуск или отключение посредством управления напряжением, током или крутящим моментом. При управлении напряжением достигается плавный пуск, но при этом не возникает реакции тока или крутящего момента. Появление устройств плавного пуска привело к качественному увеличению пускового, остановочного или тормозного дела асинхронных двигателей с короткозамкнутым ротором. Эти устройства бесполезны при пуске асинхронных двигателей с фазным ротором.
Пуск с пониженным напряжением требуется, когда пуск с полным напряжением создает нежелательные помехи в линии распределительной системы или когда требуется снижение механических нагрузок на коробки передач или системы ременного привода.
Следует отметить, что при пусковом моменте крутящий момент будет уменьшаться пропорционально квадратному проценту приложенного напряжения (т. е. 50 % напряжения дает 25 % крутящего момента = 0,50 в квадрате). Это явление также происходит обратным образом, когда напряжение увеличивается.
Существует три основных причины для применения пониженного напряжения к двигателям:
1. Уменьшить механические рывки при пуске и останове
2. Ограничение пускового тока при пуске при полном напряжении
3. Уменьшить последствия скачков давления и гидроудары в насосных системах.Электронное устройство плавного пуска также известно как полупроводниковое устройство плавного пуска с пониженным напряжением. Использование полупроводникового пуска с пониженным напряжением может обеспечить плавный бесступенчатый метод ускорения и плавного замедления асинхронного двигателя с короткозамкнутым ротором. Этот тип метода пуска при правильном применении может обеспечить эффективное и надежное средство плавного пуска и остановки двигателя и нагрузки.
Использование полупроводникового пуска с пониженным напряжением в большинстве случаев будет работать более эффективно, чем возбуждение, вихретоковые приводы и муфты. Возможности плавного разгона и торможения этих типов пускателей снижают пусковые токи в двигателе, устраняя переходные удары нагрузки и уменьшая пульсации напряжения в системе распределения. Электронное устройство плавного пуска имеет и другие преимущества, связанные с технологическим аспектом. Вот некоторые из них:— Прецизионный плавный пуск
— Функция быстрого пуска
— Плавный останов
— Пуск с ограничением тока (диапазон — от 1,5 x FLC до 4,5 X FLC)
— Уменьшение размеров генератора/трансформатора
— Индикация начала рампы (полное напряжение)
— Возможность использования с контактором BYPASS
— Энергосбережение при частичных нагрузках
— Улучшение коэффициента мощности двигателя при частичных нагрузках
— Снижение реактивной составляющей KVAR при частичных нагрузках
— Снижает пиковые импульсы, выбросы на стороне питания во время процесса запуска двигателя —
— Снижение износа электрических и механических компонентов
— Снижение затрат на техническое обслуживание
— Срок службы двигателя увеличивается благодаря более низкой рабочей температуре двигателя
— Использование с двигателями с контактными кольцами с одноступенчатым сопротивлением в ротореУстройство плавного пуска состоит из тиристор или IGBT, соединенный друг с другом, и схема запуска регулируют выходное напряжение, которое подается на асинхронный двигатель или другую нагрузку, уменьшая ток при запуске.
У устройства плавного пуска более плавная кривая тока, чем при прямом пуске, а также характеристики крутящего момента и скорости. Устройство плавного пуска обеспечивает переменное выходное напряжение, но частота выходного напряжения является фиксированной, и, кроме того, высокое содержание гармоник, особенно в диапазоне низкого напряжения.Abbildung in dieser Leseprobe nicht enthalten
Рис. 2.3: Блок-схема устройства плавного пуска
Устройство плавного пуска питается от постоянного источника питания переменного тока. Блок управления зажиганием устройства плавного пуска генерирует триггерные импульсы в определенное время, которое определяется переменным углом, а выходной сигнал устройства плавного пуска представляет собой переменную форму напряжения, которая может изменяться при изменении угла запуска блока управления зажиганием.
2.3 Устройства силовой электроники
2.3.1 Тиристор
Выпрямитель с кремниевым управлением (или выпрямитель с полупроводниковым управлением) представляет собой четырехслойное твердотельное устройство управления током.
Название «кремниевый управляемый выпрямитель» или SCR является торговой маркой General Electric для типа тиристора. SCR был разработан группой инженеров-энергетиков под руководством Роберта Н. Холла и коммерциализирован Фрэнком В. «Биллом» Гуцвиллером в 1957 году.Это устройство обычно используется в коммутационных устройствах. В нормальном выключенном состоянии устройство ограничивает ток до тока утечки. Когда напряжение затвор-катод превышает определенный порог, устройство «включается» и проводит ток. Устройство останется во включенном состоянии даже после отключения тока затвора, пока ток через устройство остается выше тока удержания. Как только ток упадет ниже тока удержания на соответствующий период времени, устройство выключится. Если затвор импульсный и ток через устройство ниже тока удержания, устройство останется в выключенном состоянии.
Если приложенное напряжение увеличивается достаточно быстро, емкостная связь может индуцировать достаточный заряд в затворе, чтобы перевести устройство во включенное состояние; это называется «запуск dv/dt».
Обычно это предотвращается путем ограничения скорости нарастания напряжения на устройстве, возможно, с помощью снаббера. «Запуск dv/dt» может не переключать тиристоры на полную проводимость быстро, а частично срабатывание тиристоров может рассеивать больше энергии, чем обычно, что может повредить устройство.Тиристоры также могут срабатывать при повышении прямого напряжения выше их номинального напряжения пробоя (также называемого перенапряжением пробоя), но опять же, это не приводит к быстрому переключению всего устройства в проводящее состояние и поэтому может быть вредным, поэтому этот режим работы также обычно избегают. Кроме того, фактическое напряжение пробоя может быть значительно выше номинального напряжения пробоя, поэтому точная точка срабатывания будет варьироваться от устройства к устройству.
Тиристоры имеют три состояния:
1. Режим блокировки в обратном направлении — напряжение подается в направлении, которое было бы заблокировано диодом
2. Режим блокировки в прямом направлении — напряжение подается в направлении, которое привело бы к открытию диода, но тиристор еще не переведен в проводимость
3. Режим прямой проводимости — тиристор включен в проводимость и будет оставаться в проводящем состоянии до тех пор, пока прямой ток не упадет ниже порогового значения, известного как «ток удержания»Abbildung in dieser Leseprobe nicht enthalten
Рис. 2.4: Структура на физическом и электронном уровне и обозначение )
Биполярный транзистор с изолированным затвором или IGBT представляет собой силовой полупроводниковый прибор с тремя выводами, используемый в основном в качестве электронного переключателя, а в более новых устройствах он отличается сочетанием высокой эффективности и быстрого переключения.
БТИЗ сочетает в себе простые характеристики управления затвором полевых МОП-транзисторов с высокой токовой способностью и низким напряжением насыщения биполярных транзисторов за счет комбинации полевого транзистора с изолированным затвором в качестве управляющего входа и биполярного силового транзистора в качестве переключателя.
одно устройство. БТИЗ используются в приложениях средней и высокой мощности, таких как импульсные источники питания, управление тяговыми двигателями и индукционный нагрев. Большие модули IGBT обычно состоят из множества устройств, подключенных параллельно, и могут иметь очень большие токи, порядка сотен ампер, с блокирующим напряжением 6000 В, что соответствует сотням киловатт.Abbildung in dieser Leseprobe nicht enthalten
Напряжение коллектор-эмиттер (В)
Рис. 2.6: Статические характеристики IGBT
среднеквадратичное значение переменного напряжения, приложенного к цепи нагрузки путем введения тиристоров между нагрузкой и источником постоянного напряжения переменного тока. Среднеквадратичное значение переменного напряжения, подаваемого на цепь нагрузки, регулируется путем управления углом срабатывания тиристоров в цепях регулятора напряжения переменного тока.
Вкратце, контроллер напряжения переменного тока представляет собой тип тиристорного преобразователя мощности, который используется для преобразования входного источника переменного тока с фиксированной частотой и фиксированным напряжением в переменное выходное напряжение переменного тока.
Среднеквадратичное значение выходного напряжения переменного тока и поток мощности переменного тока на нагрузку регулируются путем изменения (регулировки) угла срабатывания «а».Abbildung in dieser Leseprobe nicht enthalten
Рис. 2.7: Регулятор напряжения переменного тока
2.4.1 Управление фазой тиристора
При управлении фазой тиристоры используются в качестве переключателей для подключения цепи нагрузки к входному источнику переменного тока в течение части каждого входного цикла. То есть напряжение питания переменного тока прерывается с помощью тиристоров в течение части каждого входного цикла.
Тиристорный переключатель включается на часть каждого полупериода, так что входное напряжение питания появляется на нагрузке, а затем выключается на оставшуюся часть входного полупериода, чтобы отключить питание переменного тока от нагрузки.
Управляя фазовым углом или углом запуска «a» (угол задержки), можно управлять среднеквадратичным значением выходного напряжения на нагрузке.
Угол задержки запуска ‘a’ определяется как фазовый угол (значение wt), при котором тиристор включается и начинает протекать ток нагрузки. Тиристорные регуляторы напряжения переменного тока используют коммутацию сети переменного тока или коммутацию фазы переменного тока. Тиристоры в контроллерах напряжения переменного тока коммутируются от сети (коммутируются по фазе), так как на вход подается переменный ток. Когда входное переменное напряжение меняется на противоположное и становится отрицательным во время отрицательного полупериода, ток, протекающий через проводящий тиристор, уменьшается и падает до нуля. Таким образом, открытый тиристор естественным образом отключается, когда ток устройства падает до нуля.
Управление фазой Относительно недорогие тиристоры преобразовательного класса Обычно используются тиристоры с более низкой скоростью переключения, чем быстродействующие инверторные тиристоры.
Для приложений с частотой до 400 Гц, если имеются симисторы, соответствующие номинальным значениям напряжения и тока для конкретного приложения, чаще используются симисторы.
Благодаря коммутации сети переменного тока или естественной коммутации нет необходимости в дополнительных коммутационных схемах или компонентах, а схемы для контроллеров напряжения переменного тока очень просты.
Из-за характера выходных сигналов анализ и получение выражений для рабочих параметров непросты, особенно для фазоуправляемых регуляторов напряжения переменного тока с нагрузкой RL. Но, тем не менее, большинство практических нагрузок относится к типу RL, и, следовательно, при анализе и проектировании цепей регулятора напряжения переменного тока следует учитывать нагрузку RL.
2.5 Устройство плавного пуска с нагрузкой R-L
В этом разделе мы обсудим работу и характеристики однофазного двухполупериодного регулятора напряжения переменного тока с нагрузкой RL. На практике большинство нагрузок относится к типу RL. Например, если мы рассмотрим однофазный двухполупериодный регулятор напряжения переменного тока, управляющий скоростью однофазного асинхронного двигателя переменного тока, нагрузка, которая представляет собой обмотку асинхронного двигателя, является нагрузкой типа RL, где R представляет собой сопротивление обмотки двигателя, а L представляет собой индуктивность обмотки двигателя.
Однофазная двухполупериодная схема регулятора напряжения переменного тока (двунаправленный регулятор) с нагрузкой RL с использованием двух тиристоров Abbildung in dieser Leseprobe nicht enthalten и Abbildung in dieser Leseprobe nicht enthalten SCR), соединенных параллельно, показано на рисунке ниже. Вместо двух тиристоров можно использовать один симистор для реализации двухполупериодного контроллера переменного тока, если доступен подходящий Traic для желаемого среднеквадратичного значения тока нагрузки и номинальных среднеквадратичных значений выходного напряжения.
Abbildung in dieser Leseprobe nicht enthalten
Рис. 2.8: Однофазный двухполупериодный регулятор напряжения переменного тока с нагрузкой RL
Тиристор Abbildung в dieser Leseprobe nicht enthalten смещен в прямом направлении во время положительного полупериода входного питания. Предположим, что Abbildung в dieser Leseprobe nicht enthalten запускается в Abbildung в dieser Leseprobe nicht enthalten путем подачи подходящего импульса запуска на Abbildung в dieser Leseprobe nicht enthalten во время положительного полупериода входного питания.
Выходное напряжение на нагрузке соответствует входному напряжению питания, когда Abbildung in dieser Leseprobe nicht enthalten включен. Ток нагрузки Abbildung in dieser Leseprobe nicht enthalten проходит через тиристор Abbildung в dieser Leseprobe nicht enthalten и через нагрузку в направлении вниз. Этот импульс тока нагрузки, протекающий через Abbildung в dieser Leseprobe nicht enthalten, можно рассматривать как положительный импульс тока. Из-за индуктивности в нагрузке ток нагрузки Abbildung in dieser Leseprobe nicht enthalten, протекающий через Abbildung in dieser Leseprobe nicht enthalten, не упадет до нуля на Abbildung in dieser Leseprobe nicht enthalten, когда входное напряжение питания начнет становиться отрицательным.Тиристор Abbildung в dieser Leseprobe nicht enthalten будет продолжать проводить ток нагрузки до тех пор, пока вся индуктивная энергия, хранящаяся в дросселе нагрузки L, не будет полностью использована и ток нагрузки через Abbildung в dieser Leseprobe nicht enthalten не упадет до нуля в Abbildung в dieser Leseprobe nicht enthalten, где Abbildung в dieser Leseprobe nicht enthalten обозначает угол затухания (значение Abbildung в dieser Leseprobe nicht enthalten), при котором ток нагрузки падает до нуля.
Угол погасания Abbildung в dieser Leseprobe nicht enthalten измеряется от точки начала положительного полупериода входного питания до точки, где ток нагрузки падает до нуля.Abbildung in Dieser Leseprobe nicht entalten
Рис. 2.9: Требования к стробированию сигналов
Abbildung в дизерном лайнеперобе Nicht entalten
Рис. 2.10 получить окончательное выражение для тока индуктивной нагрузки однофазного двухполупериодного регулятора напряжения переменного тока с нагрузкой RL как
Abbildung in dieser Leseprobe nicht enthalten ; Где Abbildung in dieser Leseprobe nicht enthalten.
Выходное напряжение определяется по формуле
Abbildung in dieser Leseprobe nicht enthalten
2.6 Параметр производительности
2.6.1 Полное гармоническое искажение (THD) и коэффициент мощности (PF)
Гармоники – это токи или напряжения с целыми частотами кратны основной частоте электросети, равной 50 или 60 Гц (50 Гц для европейской мощности и 60 Гц для американской).
Одной из основных проблем качества электроэнергии является содержание гармоник. Существует несколько способов указания количества гармонического содержания. Наиболее широко используемой мерой является полное гармоническое искажение (THD). В статических преобразователях используются различные методы переключения для уменьшения содержания гармоник на выходе.Измерение и контроль параметров качества энергосистем переменного тока требует проведения ряда расчетов, среди которых можно учитывать суммарные гармонические искажения (THD) напряжения и тока. Этот расчет выполняется с выборками контролируемых сигналов при частоте выборки, равной степени, кратной двум частотам волн. Выборки преобразуются в цифровые значения с помощью аналого-цифровых преобразователей с конечным числом битов. Численные алгоритмы, применяемые к этим цифровым значениям, вносят некоторые ошибки в окончательные результаты из-за количества битов, используемых в вычислениях.
Математически,
ABBILDUNG в Dieser Leseprobe nicht entalten
2,7 Трехфазный мягкий стартер
Abbildung в дизерной лазовой энтуалере Enduction
Рис.
нагрузка на машину, что приводит к увеличению затрат на обслуживание и повышенному износу. Высокие токи и пики тока приводят к высоким фиксированным затратам, взимаемым энергоснабжающими компаниями (расчет пикового тока), а также к увеличению нагрузки на сеть и генератор.Устройство плавного пуска постоянно контролирует подачу напряжения на трехфазный двигатель во время фазы запуска. Таким образом, двигатель адаптируется к характеристике нагрузки машины. Механическое рабочее оборудование плавно ускоряется. Это положительно влияет на срок службы, рабочие характеристики и рабочие процессы.
Схема привода трехфазного асинхронного двигателя показана на рис. 2.11, силовые ключи могут быть тиристорными или IGBT. Трехфазные синусоидальные напряжения используются в качестве входных, которые электрически разделены на 1200 и подаются на привод асинхронного двигателя через силовые переключатели для управления пусковым током включения, а также для управления скоростью. Цепь зажигания используется для управления напряжением и, следовательно, током, подаваемым на асинхронный двигатель.
2.8 Цепи зажигания
Abbildung in dieser Leseprobe nicht enthalten
Рис. 2.12: Блок-схема цепи запуска
На рисунке с помощью однолинейной схемы показаны основные блоки, необходимые для генерации импульсов запуска для любой схемы. . Преобразователь организован от переменного тока. сила. Поскольку пусковые импульсы должны быть синхронизированы с переменным током. питание, переменный ток питание также идет на блоки изоляции и синхронизации . Изоляция важна, поскольку в схеме управления используются устройства с очень низким энергопотреблением, такие как различные микросхемы, логические элементы и т. д. Блок логической схемы использует несколько логических элементов для реализации конкретной схемы запуска. Силы импульса, полученного от логических элементов, может быть недостаточно для управления затвором тиристора, поэтому на заключительном этапе используется усиление импульса вместе с развязкой.
Разнообразие доступных схем запуска, но в основном две наиболее часто используемые схемы управления, а именно, использующие линейный сигнал и использующий косинусоидальный сигнал.
2.8.1 Использование линейного сигнала
В этой схеме линейный сигнал генерируется синхронно с переменным током. поставлять. Vs с использованием двух компараторов и примерной схемы генератора линейного изменения с использованием транзистора и конденсаторов, как описано на рис. 2.13
Abbildung in dieser Leseprobe nicht enthalten
Рис. 2.13: Основная идея схемы линейного изменения.
2.8.2 Использование косинусного управления:
В этой схеме напряжение питания Vs сначала преобразуется в косинусоидальную волну, а затем полученное таким образом сравнивается с опорным постоянным током. напряжение (Vref). Поэтому прямоугольные импульсы будут генерироваться на выходной клемме и поступать на компаратор. Этот сигнал синхронизирован с импульсом и отложен от перехода источника через ноль на угол α. Очевидно, значение α можно варьировать в диапазоне 00≤ α ≤ 1800.
Выходной сигнал комп-1 будет прямоугольным, и он переходит в состояние высокого уровня с момента, когда Vr становится больше значения косинусоидального напряжения.
Однако ширина импульса будет изменяться при изменении Vr. Нашей первой целью будет сделать ширину импульса равной 1800. Это достигается следующим образом. Выход Комп-1 подается на блок моно-1. На выходе моно-1 будет импульс небольшой ширины на положительном фронте входной прямоугольной волны. Таким образом, на выходе моно-1 будут небольшие импульсы, разделенные на 3600.Аналогично обрабатывается напряжение Vb0, т.е. оно преобразуется в косинусоидальную волну, затем сравнивается с той же переменной d.c. с помощью компаратора-2 выходной сигнал КОМП-2 будет прямоугольным и будет сдвинут на 1800 относительно выходного прямоугольного импульса КОМП-1. Это связано с тем, что Vb0 отстает от Va0 на 1800. Выход COMP-2 теперь подается на блок mono-2. На выходе моно-2 будет импульс небольшой ширины на положительном фронте входной прямоугольной волны. Таким образом, на выходе МОНО-2 будут небольшие импульсы, разделенные на 3600. Важно знать, что формы импульсов фиксированной ширины на выходе моно-1 и моно-2 сдвинуты на 1800, как показано на рис.