
Векторное управление для асинхронного электродвигателя «на пальцах»
В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе β – течет ток в роторе ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x
,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Векторное управление электродвигателем «на пальцах» / НПФ ВЕКТОР corporate blog / Habr
— Что такое векторное управление?— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Управление асинхронным двигателем. Наиболее популярные схемы.

Здравствуйте, дорогие читатели! Сегодня поговорим про управление асинхронным двигателем, а так же рассмотрим три простые схемы, которые применяются наиболее часто.
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.

Асинхронный двигатель с короткозамкнутым ротором
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.

Электромагнитный пускатель
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Управление асинхронным двигателем с помощью одного магнитного пускателя
Схема показана на рисунке.

Управление асинхронным двигателем с помощью магнитного пускателя
При нажатии на кнопку SB2 «Пуск» катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем (N). Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A, B, С, а при включении пускателя KM2 — порядок фаз меняется на С, B, A.
Схема показана на рис. 2.

Управление асинхронным двигателем с помощью двух магнитных пускателей
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1. При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.

Управление асинхронным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B. Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Смотрите также по этой теме:
Короткозамкнутый и фазный ротор. В чем различие?
Асинхронный двигатель. Устройство и принцип работы.
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Принцип работы электродвигателя. Простыми словами о сложном.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Векторное управление
Дмитрий Левкин
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами контролируется величина и угол пространственного вектора [1]. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
- Преимущества векторного управления:
- высокая точность регулирования скорости;
- плавный старт и плавное вращение двигателя во всем диапазоне частот;
- быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
- увеличенный диапазон управления и точность регулирования;
- снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
- К недостаткам векторного управления можно отнести:
- необходимость задания параметров электродвигателя;
- большие колебания скорости при постоянной нагрузке;
- большая вычислительная сложность.

Общая функциональная схема векторного управления
Общая блок-диаграмма высокопроизводительной системы управления скорости бесщеточного двигателя переменного тока показана на рисунке выше. Основой схемы являются контуры контроля магнитного потокосцепления и момента вместе с блоком оценки, который может быть реализован различными способами. При этом внешний контур управления скоростью в значительной степени унифицирован и генерирует управляющие сигналы для регуляторов момента М* и магнитного потокосцепления Ψ* (через блок управления потоком). Скорость двигателя может быть измерена датчиком (скорости / положения) или получена посредством оценщика, позволяющего реализовать бездатчиковое управление.
Классификация методов векторного управления
Начиная с семидесятых годов двадцатого века было предложено множество способов управления моментом. Не все из них нашли широкое применение в промышленности. Поэтому, в данной статье рассматриваются только самые популярные методы управления. Обсуждаемые методы контроля момента представлены для систем управления асинхронными двигателями и синхронными двигателями с постоянными магнитами с синусоидальной обратной ЭДС.
Существующие методы управления моментом могут быть классифицированы различным способом.
- Чаще всего методы управления моментом разделяют на следующие группы:
- линейные (ПИ, ПИД) регуляторы;
- нелинейные (гистерезисные) регуляторы.
| Метод управления | Диапазон регулирования скорости | Погрешность скорости3, % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | ||
|---|---|---|---|---|---|---|---|---|
| Скалярный | 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | ||
| Векторный | Линейный | Полеориентированное управление | >1:2002 | 0 | Высокий | Высокая | Позволяет плавно и быстро управлять основными параметрами двигателя — моментом и скоростью. Для работы данного метода требуется информация о положении ротора. | |
| Прямое управление моментом с ПВМ | >1:2002 | 0 | Высокий | Высокая | Гибридный метод, разработанный для того чтобы объединить преимущества ПОУ и ПУМ. | |||
| Нелинейный | Прямое управление моментом с таблицей включения | >1:2002 | 0 | Высокий | Высокая | Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. | ||
| Прямое самоуправление | >1:2002 | 0 | Высокий | Высокая | Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. | |||
Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Среди векторного управления наиболее широко используются полеориентированное управление (FOC — field oriented control) и прямое управление моментом (DTC — direct torque control).
Линейные регуляторы момента работают вместе с широтно-импульсной модуляцией (ШИМ) напряжения. Регуляторы определяют требуемый вектор напряжения статора усредненный за период дискретизации. Вектор напряжения окончательно синтезируется методом ШИМ, в большинстве случаев используется пространственно векторная модуляция (ПВМ). В отличие от нелинейных схем управления моментом, где сигналы обрабатываются по мгновенным значениям, в линейных схемах контроля момента, линейный регулятор (ПИ) работает с значениями усредненными за период дискретизации. Поэтому частота выборки может быть уменьшена с 40 кГц у нелинейных регуляторов момента до 2-5 кГц в схемах линейных регуляторов момента.
Полеориентированное управление
Полеориентированное управление (ПОУ, англ. field oriented control, FOC) — метод регулирования, который управляет бесщеточным электродвигателем переменного тока (СДПМ, АДКР), как машиной постоянного тока с независимым возбуждением, подразумевая, что поле и момент могут контролироваться отдельно.Полеориентированное управление, предложенное в 1970 году Блашке [3] и Хассе [4] основано на аналогии с механически коммутируемым коллекторным двигателем постоянного тока с независимым возбуждением. В этом двигателе разделены обмотки возбуждения и якоря, потокосцепление контролируется током возбуждения индуктора, а момент независимо управляется регулировкой тока якоря. Таким образом, токи потокосцепления и момента электрически и магнитно разделены.

Общая функциональная схема бездатчикового полеориентированного управления1
С другой стороны бесщеточные электродвигатели переменного тока (АДКР, СДПМ) чаще всего имеют трехфазную обмотку статора, и вектор тока статора Is используется для контроля и потокосцепления и момента. Таким образом, ток возбуждения и ток якоря объединены в вектор тока статора и не могут контролироваться раздельно. Разъединение может быть достигнуто математически — разложением мгновенного значения вектора тока статора Is на две компоненты: продольную составляющую тока статора Isd (создающую поле) и поперечную составляющую тока статора Isq (создающую момент) во вращающейся dq системе координат ориентированной по полю ротора (R-FOC – rotor flux-oriented control) — рисунок выше. Таким образом, управление бесщеточным двигателем переменного тока становится идентичным управлению КДПТ с независимым возбуждением и может быть осуществлено используя инвертер ШИМ с линейным ПИ регулятором и пространственно-векторной модуляцией напряжения.
В полеориентированном управлении момент и поле контролируются косвенно посредством управления составляющими вектора тока статора.
Мгновенные значения токов статора преобразовываются к dq вращающейся системе координат с помощью преобразования Парка αβ/dq, для выполнения которого также требуется информации о положении ротора. Поле контролируется через продольную составляющую тока Isd, в то время как момент контролируется через поперечную составляющую тока Isq. Обратное преобразование Парка (dq/αβ), математический модуль преобразования координат, позволяет вычислить опорные составляющие вектора напряжения Vsα* и Vsβ*.

Формы сигналов на разных этапах преобразования
Для определения положения ротора используется либо датчик положения ротора установленный в электродвигателе либо реализованный в системе управления бездатчиковый алгоритм управления, который вычисляет информацию о положении ротора в режиме реального времени на основании тех данных, которые имеются в системе управления.
Прямое управление моментом с пространственно векторной модуляцией напряжения
Блок-схема прямого управления моментом с пространственно векторной модуляцией с регулировкой момента и потокосцепления с обратной связью работающей в прямоугольной системе координат ориентированной по полю статора представлена на рисунке ниже. Выходы ПИ регуляторов момента и потокосцепления интерпретируются как опорные составляющие напряжения статора Vψ* и VM* в системе координат dq ориентированной по полю статора (англ. stator flux-oriented control, S-FOC). Эти команды (постоянные напряжения) затем преобразуются в неподвижную систему координат αβ, после чего управляющие значения Vsα* и Vsβ* поступают на модуль пространственно векторной модуляции.

Функциональная схема прямого управления моментом с пространственно векторной модуляцией напряжения
Обратите внимание, что данная схема может рассматриваться как упрощенное управление ориентированное по полю статора (S-FOC) без контура управления током или как классическая схема прямого управления моментом с таблицей включения (ПУМ-ТВ, англ. switching table DTC, ST DTC) в которой таблица включения заменена модулятором (ПВМ), а гистерезисный регулятор момента и потока заменены линейными ПИ регуляторами.
В схеме прямого управления моментом с пространственно векторной модуляцией (ПУМ-ПВМ) момент и потокосцепление напрямую управляются в замкнутом контуре, поэтому необходима точная оценка потока и момента двигателя. В отличии от классического алгоритма гистерезисного прямого управления моментом, ПУМ-ПВМ работает на постоянной частоте переключения. Это значительно повышает характеристики системы управления: уменьшает пульсации момента и потока, позволяет уверенно запускать двигатель и работать на низких оборотах. Но при этом снижаются динамические характеристики привода.
Представленная группа регуляторов момента отходит от идеи преобразования координат и управления по аналогии с коллекторным двигателем постоянного тока, являющегося основой для полеориентированного управления. Нелинейные регуляторы предлагают заменить раздельное управление на непрерывное (гистерезисное) управление, которое соответствует идеологии работы (включено-выключено) полупроводниковых устройств инвертора.
В сравнении с полеориентированным управлением схемы прямого управления моментом имеют следующие характеристики:
- Преимущества:
- простая схема управления;
- отсутствуют контуры тока и прямое регулирование тока;
- не требуется преобразование координат;
- отсутствует отдельная модуляция напряжения;
- датчик положения не требуется;
- хорошая динамика.
- Недостатки:
- требуется точная оценка вектора магнитного потокосцепления статора и момента;
- сильные пульсации момента и тока из-за нелинейного (гистерезисного) регулятора и переменной частоты переключения ключей;
- шум с широким спектром из-за переменной частоты переключения.
Прямое управление моментом
Впервые метод прямого управления моментом с таблицей включения был описан Такахаси и Ногучи в статье IEEJ представленной в сентябре 1984 года и позже в статье IEEE опубликованной в сентябре 1986 года [5]. Схема классического метода прямого управления моментом (ПУМ) на много проще, чем у метода управления по полю (ПОУ), так как не требуется преобразования систем координат и измерения положения ротора. Схема метода прямого управления моментом (рисунок ниже) содержит оценщик момента и потокосцепления статора, гистерезисные компараторы момента и потокосцепления, таблицу включения и инвертор.
Принцип метода прямого управления моментом заключается в выборе вектора напряжения для одновременного управления и моментом и потокосцеплением статора. Измеренные токи статора и напряжение инвертора используются для оценки потокосцепления и момента. Оцененные значения потокосцепления статора  и момента
и момента  сравниваются с управляющими сигналами потокосцепления статора ψs* и момента двигателя M* соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора
сравниваются с управляющими сигналами потокосцепления статора ψs* и момента двигателя M* соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора  полученного исходя из его углового положения
полученного исходя из его углового положения  . Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.
. Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.

Классическая схема прямого управления моментом с таблицей включения с датчиком скорости
- Характерные черты схемы ПУМ-ТВ:
- синусоидальные формы потокосцепления и токов статора с коэффициентом гармоник определяемым зоной гистерезиса (зоной нечувствительности) регуляторов потокосцепления и момента;
- отличная динамика момента;
- зоны гистерезиса потокосцепления и момента определяют частоту переключения инвертора, которая изменяется с изменением синхронной скорости и изменением нагрузки [2].
Имеется множество вариаций классической схемы ПУМ-ТВ нацеленых на улучшение пуска, условий перегрузки, работы на очень низких скоростях, уменьшение пульсаций момента, работу на переменной частоте переключения и уменьшение уровня шумов.
Недостатком классического метода прямого управления моментом является наличие высоких пульсаций тока и момента в установившемся состоянии. Проблема устраняется повышением рабочей частоты инвертора выше 40кГц, что увеличивает общую стоимость системы управления [1].
Прямое сомоуправление
Заявка на патент метода прямого самоуправления была подана Депенброком в октябре 1984 года [6]. Блок схема прямого самоуправления показана ниже.
Основываясь на командах потокосцепления статора ψs* и текущих фазовых составляющих ψsA, ψsB и ψsC компараторы потокосцепления генерируют цифровые сигналы dA, dB и dC, которые соответствуют активным состояниям напряжений (V1 – V6). Гистерезисный регулятор момента имеет на выходе сигнал dM, который определяет нулевые состояния. Таким образом, регулятор потокосцепления статора задает отрезок времени активных состояний напряжений, которые перемещают вектор потокосцепления статора по заданной траектории, а регулятор момента определяет отрезок времени нулевых состояний напряжений, которые поддерживают момент электродвигателя в определенном гистерезисом поле допуска.

Схема прямого самоуправления
- Характерными особенностями схемы прямого самоуправления являются:
- несинусоидальные формы потокосцепления и тока статора;
- вектор потокосцепления статора перемещается по шестиугольной траектории;
- нет запаса по напряжению питания, возможности инвертора используются полностью;
- частота переключения инвертора ниже чем у прямого управления моментом с таблицей включения;
- отличная динамика в диапазонах постоянного и ослабленного поля.
Заметьте, что работа метода прямого самоуправления может быть воспроизведена с помощью схемы ПУМ-ТВ при ширине гистерезиса потока 14%.
Библиографический список
7. Асинхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
7.1. Принцип действия асинхронного двигателя
7.2. Статические характеристики асинхронного двигателя
7.3. Управление асинхронными двигателями
7.3.1. Управление трехфазными асинхронными двигателями
7.3.2. Управление двухфазными асинхронными двигателями
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 900 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 900 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 900. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 900 друг к другу в пространстве и времени. Они суммируются, и создается результирующий магнитный поток, имеющий постоянную амплитуду и вращающийся по окружности с частотой w, где w=2p¦, а ¦ — частота сети.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
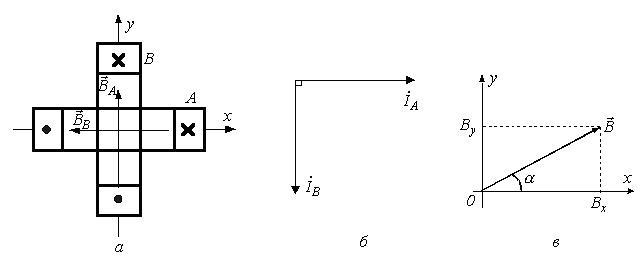
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-900).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:

Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен ,
,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
 , откуда a=wt.
, откуда a=wt.
Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой  , описывая окружность, что соответствует круговому вращающемуся полю.
, описывая окружность, что соответствует круговому вращающемуся полю.
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
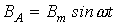 ;
;  ;
;  .
.
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ,
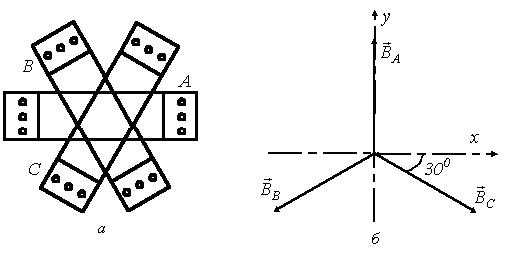
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
Рис. 72. Трехфазный АД с фазным ротором
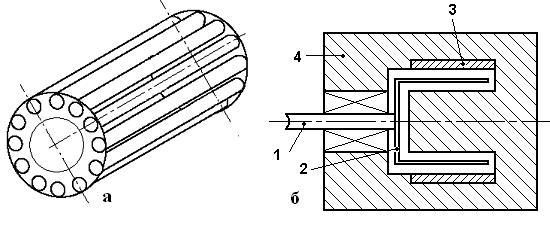
Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
7.2. Статические характеристики асинхронного двигателя
Под действием электромагнитной индукции в обмотках или элементах короткозамкнутого ротора («беличьей клетке») индуктируются вторичные ЭДС и токи частоты ω2, которые взаимодействуют с вращающимся магнитным полем, создается электромагнитный момент M, что приводит к вращению ротора с частотой ω1. Рассмотрим для примера модель двигателя, в которой число пар полюсов p=1.
Частота индуцируемых во вторичной обмотке (роторе) ЭДС и токов ω2 зависит от скольжения S:
 .
.
Эквивалентная схема цепи ротора в рабочем режиме показана на Рис 74.
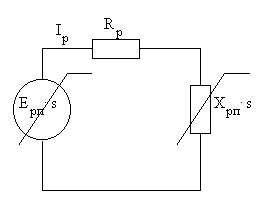
Рис. 74. Схема цепи ротора АД
Она содержит изменяемый источник ЭДС Eрп·S и изменяемое индуктивное сопротивление xр=xрп·S. Они изменяются при изменении скольжения S (частоты вращения), а активное сопротивление Rp не изменяется.
Мы можем привести рабочий режим двигателя к режиму неподвижного ротора и рассматривать асинхронную машину как обычный трансформатор с неподвижными обмотками; в результате преобразования получаем эквивалентную схему. АД, с учетом параметров обмотки статора.
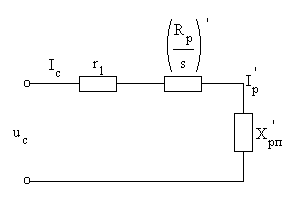
Рис. 75. Эквивалентная электрическая схема АД
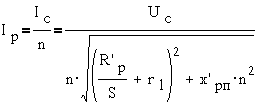
На схеме обозначены:  — приведенные сопротивления, n- коэффициент трансформации, а r1— активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
— приведенные сопротивления, n- коэффициент трансформации, а r1— активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
Выражение для вращающегося момента можем получить из энергетического уравнения M·ω1= M·ω+m1·Ip2·Rp, где m1— количество фаз. Левая часть уравнения — электромагнитная мощность, а правая — механическая плюс электрическая мощности.
Подставляя сюда выражения для тока ротора, получим аналитическое выражение для электромагнитного момента и, если пренебречь активным сопротивлением обмотки статора, получается уравнение Клосса, отражающее зависимость электромагнитного момента от скольжения. Выражение для момента двигателя представлено через параметры критической точки:
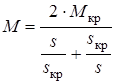 .
.
Скольжение, соответствующее максимальному моменту, называется критическим и обозначается SK или SM.
Критическое скольжение за зависит от соотношение активного и индуктивного сопротивлений ротора. При r1=0 получим  и
и 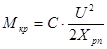 .
.
Вид зависимости электромагнитного момента и тока ротора от скольжения показан на. рис. 76.
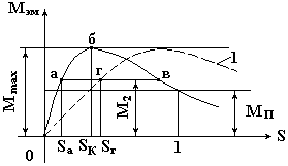
Рис. 76. Зависимость электромагнитного момента АД от скольжения
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2. На рис. 76 имеются две точки, для которых справедливо равенство Мэм = М2; это точки а и в.
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы. Точка б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2больше пускового МП, двигатель при включении не запустится, останется неподвижным. Еще выводы:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений;
- вращающий момент пропорционален квадрату напряжения сети.
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n2 = f (M2). Механическую характеристику получают при условии U — const, w1 — const. На рис. 77 изображена типичная механическая характеристика асинхронного двигателя.
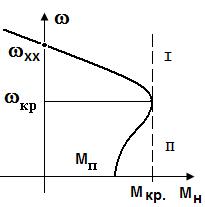
Рис. 77. Механическая характеристика асинхронного двигателя
На механической характеристике АД можно выделить два участка, которые разделены значением Мкр:
- режим устойчивой работы,
- режим неустойчивой работы.
Для каждого двигателя есть свое значение Мкр. При работе двигателя на первом участке Мкр.< Мн<0. и двигатель может развить вращающий момент, компенсирующий момент нагрузки. При работе двигателя на втором участке Мкр.> Мн происходит торможение и двигатель останавливается.
Различают 3 статических режима работы:
- Двигательный. В этом режиме направление вращения ротора и поля совпадают и . wp<w.
- Режим генераторного торможения. В этом режиме направление вращения ротора и поля совпадают, но . wp>w. Это возможно, если момент нагрузки поменяет знак. Двигатель не потребляет, а отдает энергию.
- Режим торможения противовключением. Реализуется, если в обмотке управления изменится фаза на 1800, после этого вращающий момент поменяет знак и будет тормозить ротор.
7.3. Управление асинхронными двигателями
Есть различные способы управления асинхронными двигателями:
- параметрическое управления трехфазными асинхронными двигателями.
- симметричное частотное управление,
- несимметричное амплитудно–фазовое управление,
7.3.1. Управление трехфазными асинхронными двигателями
1. Рассмотрим сначала способы управления трехфазными асинхронными двигателями. Первый способ используется для двигателей с фазным ротором. Критическое скольжение Skr определяется активным сопротивлением ротора Rr. Если Rr изменять, то будет изменяться наклон механической характеристики и соответственно скорость вращения ротора. Рис.78..
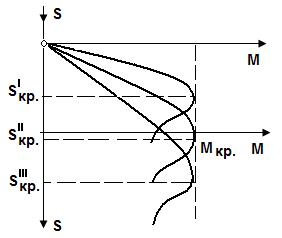
Рис. 78. Механическая характеристика асинхронного двигателя
Такой способ используется при пуске двигателя под нагрузкой, когда желательно, чтобы пусковой момент был максимальным. Для регулирования он применяется редко, т. к. велики тепловые потери в роторной цепи. Другим способом регулирования скорости является изменение напряжения на статоре, для АД вращающий момент изменяется пропорционально квадрату напряжения. При этом изменение напряжения питания мало влияет на частоту вращения ротора на рабочем участке и диапазон управления напряжением весьма ограничен.
2. Плавное регулирование скорости в широких пределах с сохранением достаточной жесткости характеристик возможно только при частотном управлении.. Изменяя частоту вращения поля ω1, можно изменять частоту вращения ротора ω при этом желательно, чтобы. жесткость характеристики не изменялась. Для этого одновременно с частотой, изменяют напряжение питания Uc так, чтобы их отношение оставалось постоянным Uc/w1=const.
Такое управление называется пропорциональным частотным управлением. Вид механических характеристик при пропорциональном управлении показан на рис. 79.
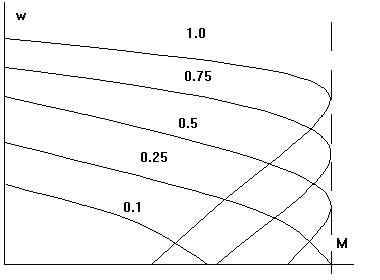
Рис. 79. Частотное управление асинхронным двигателем
При симметричном частотном управлении требуется специальное устройство преобразователь частоты, формирующий на выходе синусоидальный сигнал с изменяемой частотой w. Поле при этом управлении круговое, амплитуды на обмотках равны. Диапазон частот должен быть ограничен, так как при низких частотах падает индуктивное сопротивление обмоток и сильно растет ток, для высоких частот тоже существуют конструктивные и электрические ограничения. Поэтому при частотном управлении на самом деле идет управление по двум параметрам: частоте и амплитуде.
Функциональная схема частотного управления представлена на. на рис. 80. Она состоит из управляемого выпрямителя УВ, преобразующего напряжение переменного тока частотой 50 Гц в напряжение постоянного тока Uп, величина которого может регулироваться устройством управления УУ. Автономный инвертор АИ преобразует напряжение Uп в трехфазное напряжение изменяемой частоты f1. Управляющее устройство, изменяя частоту f1в в зависимости от задания ωз, изменяет также и напряжение Uп так, чтобы их отношение оставалось постоянным. Система управления может иметь обратную связь по скорости вращения через тахогенератор ТГ.
Более совершенным, чем пропорциональное управление, является частотно-токовое управление, при котором контролируется, кроме частоты вращения, ток якоря от датчика, что позволяет оставлять постоянным поток при изменении частоты f1 и нагрузки.
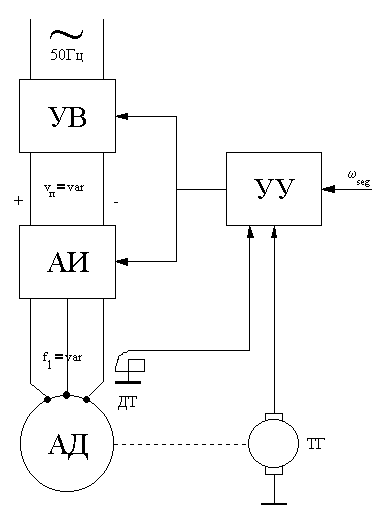
Рис. 80. Функциональная схема частотного управления асинхронным двигателем
7.3.2. Управление двухфазными асинхронными двигателями
В исполнительных приводах малой мощности широко в основном используются управляемые и неуправляемые двухфазные асинхронные двигатели. Эти , двигатели имеют две обмотки: одна включается в сеть непосредственно и называется обмоткой возбуждения (главной). На обмотку управления (вспомогательную), сдвинутую на статоре на90o градусов напряжение подается через фазосдвигающий элемент. Ротор всегда короткозамкнутый.
При таком способе управления есть разные варианты: амплитудное, фазовое и амплитудно–фазовое управление. При этих способах. на второй обмотке можно менять амплитуду напряжения, его фазу или оба параметра одновременно. При этом поле превращается из кругового в эллиптическое. При этом наряду с напряжениями и токами прямой последовательности фаз, создающими двигательный режим, возникает напряжение и токи обратной последовательности, вызывающие торможение. Таким образом, меняя степень асимметрии, можно регулировать скорость двигателя. Рис.81.
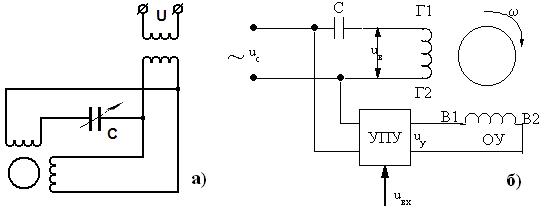
Рис. 81. Конденсаторный и управляемый двухфазные АД
При Uy=0, получим пульсирующее поле и w=0. Наиболее распространенным способом является конденсаторное управление. Чаще всего используется амплитудное несимметричное управление, когда UB=UC, а Uγ=α·Uc, где α меняется от 0 до 1. Можно получить выражения для вращающего момента при амплитудном управлении, аналогичное уравнению Клосса.
При симметрии напряжений, когда α=1, из этого уравнения получим нормальное уравнение выражение для асинхронной машины Так как в двухфазных двигателях SM>1, то при α=0, т.е. при отключении обмотки управления двигатель тормозится, и останавливается при S=1.
Механические и регулировочные характеристики асинхронного двигателя. нелинейны. Их заменяют в рабочей области прямыми:
M = b1U-b2w.
Коэффициенты b1 и b2 определяют по паспортным данным АД. В момент пуска М =Мп, w = 0, поэтому
Мп = b1∙Un и b1 = Мн/Un.
Для номинального режима аналогично получим, учитывая , что PN = MN∙wN,
MN = Мп -b2∙ wN и b2∙ = (Мп -MN)/wN.
Мы получим уравнение линеаризованной механической характеристики :
w = (b1/ b2)∙U—M/ b2.
Механические и регулировочные характеристики асинхронного двигателя показаны на рис. 82.

Рис. 82. Механическая и регулировочная характеристики двухфазного АД
После линеаризации асинхронный двигатель может быть представлен как линейная динамическая система, описываемая следующими уравнениями (bw = b1, bu = b2):


 .
.
Рассмотрим случай, когда сухое трение отсутствует и есть только скоростное трение, то есть МТ = F∙w. Заменив . и проведя преобразования получим:
и проведя преобразования получим:
 .
.
Отсюда выражение для передаточной функции
 , где коэффициент передачи
, где коэффициент передачи  и электромеханическая постоянная времени
и электромеханическая постоянная времени 
Этой передаточной функции соответствует структурная схема и переходный процесс, представленные на рис. 83.
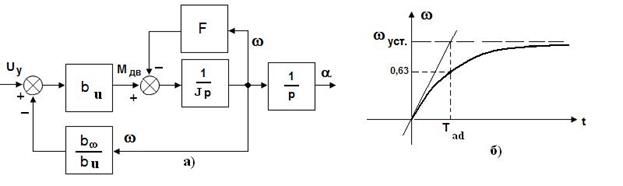
Рис. 83. Структурная схема и переходный процесс АД
Векторное управление асинхронным двигателем | Техпривод
Преобразователь частоты регулирует момент и скорость вращения асинхронного двигателя, используя один из двух основных методов частотного управления — скалярный или векторный. Рассмотрим подробнее особенности этих методов.
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Квадратичная скалярная рабочая характеристика
В некоторых случаях, например, при работе преобразователя на мощные вентиляторы и насосы, используют квадратичную вольт-частотную характеристику с пониженным моментом, что позволяет учесть механику процесса, снизить токи, и, соответственно, потери на низких частотах.
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает. Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
Векторное управление без обратной связи
В этом случае частотный преобразователь вычисляет скорость вращения двигателя по математической модели на основе ранее введенных данных (параметров двигателя) и данных о мгновенных значениях тока и напряжения. Опираясь на полученные расчеты, ПЧ принимает решение об изменении выходного напряжения.
Перед включением векторного бессенсорного режима необходимо тщательно выставить номинальные параметры двигателя: напряжение, ток, частоту, скорость (обороты), мощность, количество полюсов, а также сопротивление обмоток и индуктивные параметры. Если какие-то значения неизвестны, рекомендуется провести автотестирование двигателя на холостом ходу. Некоторые модели векторных преобразователей частоты устанавливают параметры по умолчанию для стандартного двигателя после введения номинальных значений. Также необходимо задать пределы временных и токовых параметров векторного управления.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
Другие полезные материалы:
10 типичных проблем с частотниками
Тонкости настройки преобразователя частоты
Назначение и виды энкодеров
Обзор алгоритмов управления асинхронными электроприводами
Современный асинхронный электропривод реализуется на базе силовой полупроводниковой техники с применением микропроцессорного управления. Его возможности позволяют организовать регулирование выходных координат электропривода в широком диапазоне, с высокой точностью и быстродействием.
Современные преобразователи частоты с микропроцессорным управлением позволяют реализовывать традиционные или создавать новые программные алгоритмы и синтезировать асинхронные электроприводы с широким набором эксплуатационных характеристик.
Цель: Обзор алгоритмов управления асинхронными электроприводами и выбор более подходящего алгоритма для тягового электропривода троллейбусов.
Основным условием для выбора алгоритма управления тяговым электроприводом троллейбуса это поддержание момента на валу двигателя, как при разгоне, так и при торможении. Так как мощность тягового электропривода большая необходимо учитывать тепловые потери. Исходя из этого, рассмотрим и сделаем анализ существующих алгоритмов управления
Векторное управление, ориентированное по роторному потоку, для асинхронного двигателя, питающегося от источника тока
Для создания источника тока, управление элементами инвертора определяются быстрыми местными петлями тока, контролируемыми заранее описанными мгновенными значениями фазовых токов
Двухфазные компоненты статорного тока в установленной системе координат (id*, iq*) полученных из петли управления скоростью (позицией). Они определяют мгновенные заранее описанные значения статорного тока (ia*, ib*, ic*), сравниваемые с реальными, измеренными, значениями статорных токов ia, ib, ic. Управление элементами инвертора (всегда для каждой фазы противоположные состояния) определяются таким образом, чтобы, независимо от каждой фазы, лимитировать частоту переключений, предусматривая гистерезис в процентах от максимального значения заранее описанного тока.
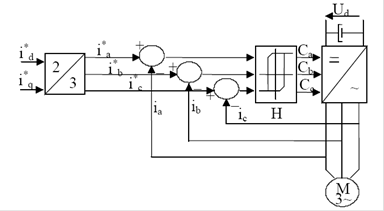
Рис. 1. Принцип широтной модуляции с реакцией по току
Главными преимуществами этой стратегии модуляции являются:
1. Простота реализации;
2. Возможность реализации на аналоговых компараторах;
3. Хорошие динамические характеристики;
4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Описанная стратегия имеет ряд недостатков:
1. Поскольку компараторы каждой фазы независимы, не существует способа генерации нулевого вектора напряжения;
2. На маленьких частотах существует тенденция появления переключений на высокой частоте в результате неправильной работы компаратора.
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
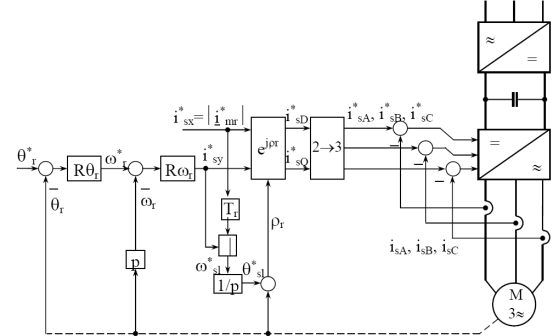
Рис. 2. Система управления позицией ротора косвенным методом
Регулятор позиции Rθr (пропорционального типа) перемещает заданное значение скорости ротора  , которое сравнивается с реальным значением скорости ротора ωr, а у регулятора скорости Rωr в качестве выходного параметра выступает активное значение тока статора i*sy.
, которое сравнивается с реальным значением скорости ротора ωr, а у регулятора скорости Rωr в качестве выходного параметра выступает активное значение тока статора i*sy.
На этой основе вместе с реактивной составляющей тока статора i*sx, рассчитывается частота скольжения. Полученная величина суммируется с позицией ротора и таким образом определяется позиция ρr вектора потока ротора.
Блоки (ejρr) и (2→3) осуществляют трансформацию координат из вращающейся системы в фиксированную, из двухфазных ортогональных значений в трехфазные:
Система управления скоростью (позицией) вращения асинхронного двигателя в непосредственной форме
В случае этого метода управления позиция ротора ρr, необходимая для трансформации координат, получается на основании измеренных значений токов статора, используя модель потока.
В результате получаются два пути управления: моментом (активный ток) и потоком (реактивный ток).
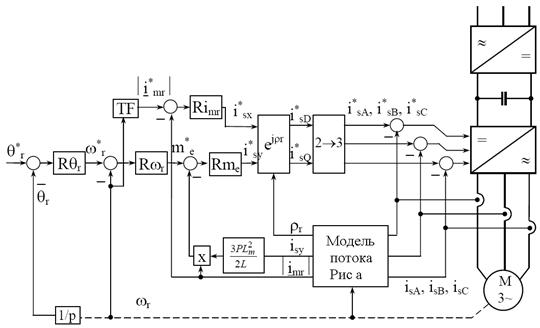
Рис. 3. Система управления позицией асинхронного двигателя прямым методом
В случае управления моментом заданной величиной может быть позиция или скорость ротора. В случае управления позицией её заданная величина θ*r сравнивается с измеренной, полученной в результате интегрирования скорости ротора. Разница между этими двумя параметрами передается регулятору позиции (пропорционального типа). Его выходное значение определяет заданное значение скорости вращения, которое сравнивается с реальной скоростью. Разница между этими двумя параметрами передается регулятору скорости (пропорционально интегрального типа), на выходе которого получается заданное значение электромагнитного момента. Значение момента сравнивается с измеренным параметром (рассчитанным на основании компонентов статорных токов в результате использования модели потока). Регулятор момента передает заданное значение активной составляющей статорного тока в систему потока ротора i*sy.
В случае управления потоком заданное значение тока намагничивания ротора, полученное на выходе трансформатора, сравнивается с измеренным значением, являющимся результатом работы модели потока. Результат сравнения используется регулятором реактивного тока, который в свою очередь передает заданное значение реактивной составляющей статорного тока в систему потока ротора i*sх.
Угол позиции вектора потока ротора, необходимого для трансформации координат (ejρr), получается из модели потока на базе измеренных значений статорных токов и скоростей ротора.
Представленные варианты схем управления применяются как для маленьких, так и для средних мощностей, где могут быть использованы инверторы напряжения с заданными токами. Соответственно, модуляция каждой фазы является результатом сравнения заданных фазных токов, полученных в схеме векторного управления, с измеренными значениями статорных токов. Поэтому, не во всех тяговых электроприводах троллейбусов возможно это использовать, поскольку троллейбусы выпускаются с разными мощностями электродвигателей.
Векторное управление с ориентацией по потоку ротора для асинхронного двигателя, питающегося от инвертора напряжения
В системах с большими и очень большими мощностями, из-за потерь при переключениях, невозможно использовать инверторы напряжения как источник тока, поэтому здесь используются инверторы напряжения как источник напряжения. Эти инверторы являются обобщенным случаем автоматических систем векторного управления с широтной модуляцией. Системы управления передают мгновенные заранее заданные значения фазных напряжений независимо от стратегии модуляции. Управление полупроводниковыми элементами осуществляется в зависимости от типа модуляции.
Считая машину ненасыщенной (постоянные индуктивности), электромагнитный момент асинхронного двигателя определяется компонентами статорных токов в различных системах координат. Так как инверторы напряжения являются источниками напряжения, а контроль моментом осуществляется статорными токами, необходимо осуществлять этот контроль посредством питающих напряжений. Таким образом, для управления моментом необходимо осуществить следующие преобразования: напряжение → ток → момент.
Система управления скоростью (позицией) асинхронного двигателя с заданием токов i*sx, i*sy
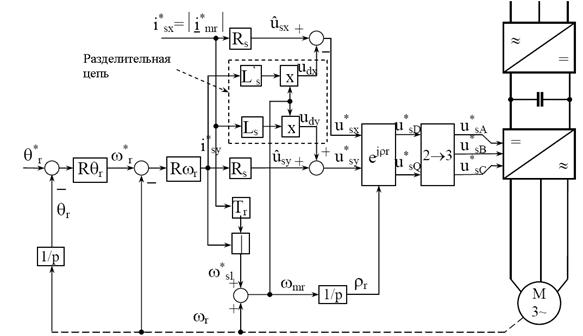
Рис. 4. Система управления позицией асинхронного двигателя с заданием токов i*sx, i*sy
Важен тот факт, что статорное сопротивление Rs, которое участвует в расчете компонентов ûsx, ûsy, не является лишь собственным сопротивлением двигателя, определяемое адекватными измерительными приборами, а эквивалентное сопротивление (большее) статора, включающее также сопротивления полупроводниковых элементов, находящихся в управлении, эквивалентное сопротивление промежуточной цепи, сопротивления проводников и др.
Блоки (ejρr) и (2→3) осуществляют трансформации координат из вращающейся системы координат в фиксированную, соответственно, из двухфазных ортогональных величин в трехфазные, используя в качестве переменных составляющие напряжения.
ЗАКЛЮЧЕНИЕ
В результате проведенного анализа схем видно, что метод, где инвертор выступает в качестве источника тока, позволяет «мягко» управлять как моментом, так и скоростью вращения, что позволяет добиться хороших динамических характеристик.
Другими преимуществами этой стратегии модуляции являются:
— простота реализации системы;
— возможность реализации на аналоговых компараторах;
— нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Однако реализация привода мощностью выше 10 кВт таким методом не является эффективной. Это связанно с тем, что частота переключений силовых элементов составляет порядка 10–20кГц, вследствие чего выделяется большое количество тепла на коллекторе IGBT транзистора. Следовательно он не может использоваться в тяговом электроприводе троллейбусов.
В схемах, где инвертор выступает в качестве источника напряжения, частота переключений может быть ниже 10кГц, в следствии количество тепла, выделяемое на инверторе, в 2 и более раза меньше, чем в предыдущем методе. Также преобразования проще, поскольку мы управляем только частотой и амплитудой напряжения.
Но при данном способе управления изменения параметров двигателя в процессе работы (изменение сопротивления и индуктивности обмоток) не позволяют добиться таких же динамических характеристик, как при управлении инвертором, выступающем в качестве источника тока.
Точность в электроприводе транспортных средств не самое важное: даже если скорость троллейбуса будет изменяться в пределах нескольких километров в час — это не существенно.
Исходя из этого, можно сделать вывод, что данный алгоритм управления походит для тягового электропривода троллейбусов.
Литература:
1. Шрейнер Р. Т. «Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты» Екатеринбург: УРО РАН, 2000
2. Соколовский Г. Г. «Электроприводы переменного тока С частотным регулированием» Москва: ACADEMA, 2006
Основные термины (генерируются автоматически): асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия модуляции.