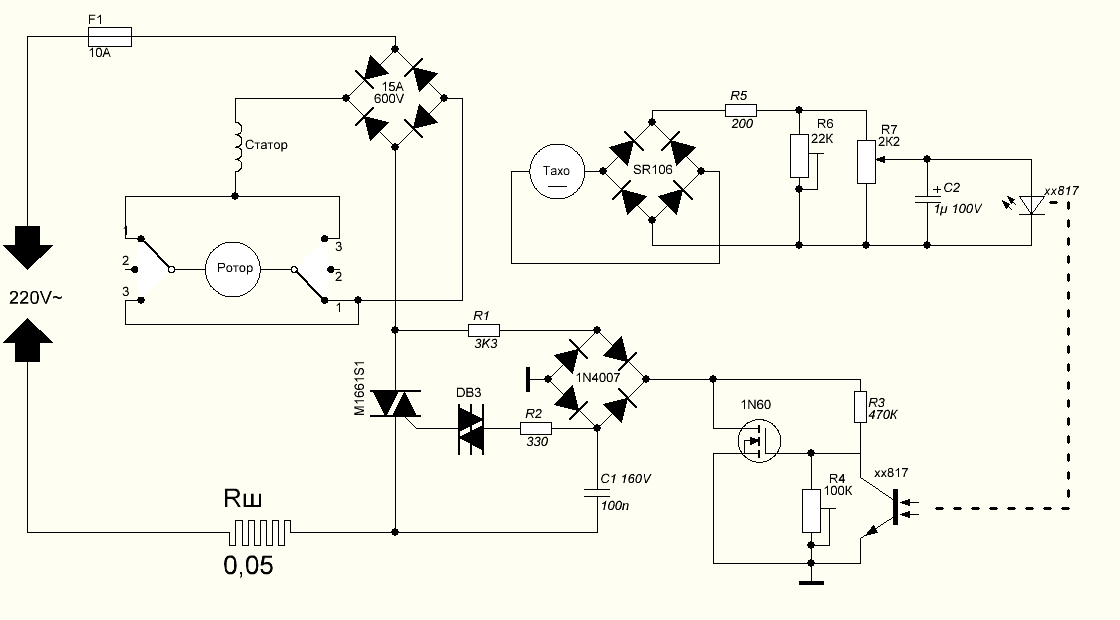
Регулирование скорости вращения коллекторного двигателя постоянного тока
Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться. На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
Регулирование оборотов двигателя постоянного тока методом ШИМ
Главные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Изменение скорости вращения ротора
Регулятор оборотов коллекторного двигателя подает на щетки импульсы. Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
T=1/F,
где F — это частота. В нашем случае частота равна 10 Гц, тогда:
T=1/10=0,1 с,
то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды.
Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле:
S=T/t,
где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
S=0,1/0,05=2.
Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле:
D=1/S,
где S — полученная ранее скважность. Выполняем подсчет:
D=1/2=0,5.
Вычисляем проценты:
0,5*100=50%.
Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения. В нашем случае периоды подачи и отсутствия напряжения равны, но если нужно получить повышенное количество оборотов ротора, длину импульса t нужно увеличивать. Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна:
Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна:
t=T-25%=0,1–25%=0,075 с,
то есть 75% времени периода следования импульсов нужно подавать ток.
Найдем скважность:
S=0,1/0,075=1,33.
Теперь вычислим коэффициент заполнения:
D=1/1,33=0,75*100=75%.
Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность.
Способы торможения двигателя
Если используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
При этом существует 2 основных режима работы:
- Режим непрерывного тока. Ток в якоре хотя и уменьшается во время паузы, но все же продолжает протекать в прежнем направлении.
- Режим прерывистого тока. Ток в якоре течет только во время действия импульса, на паузе напряжение равняется нулю.
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения.
Виды преобразователей
Широтно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
- Тиристорные. Дополняются схемами с параллельной и последовательной искусственной коммутацией.
- С запираемыми тиристорами. Схема работы мало отличима от транзисторных.

- Транзисторные. Характеризуются низкой инерционностью и минимальным внутренним сопротивлением.
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности.
Так же по теме ШИМ регулирования предлагаем статью «Регулирование скорости вращения коллекторного двигателя постоянного тока»
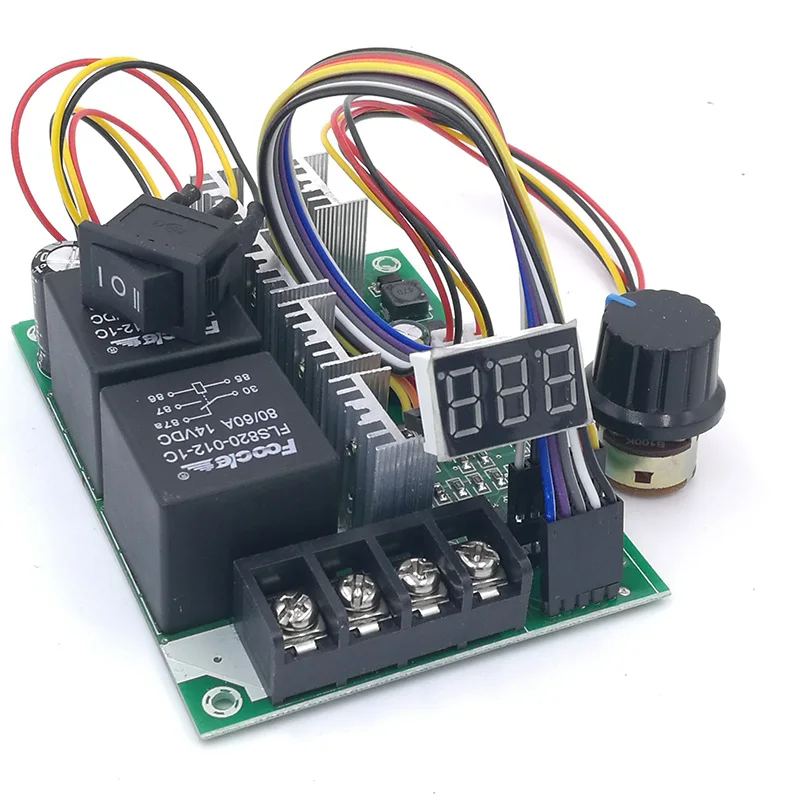
Блок управления коллекторными двигателями BMD
Контроллер коллекторного двигателя BMD
Контроллер коллекторного двигателя BMD
| Напряжение питания Uпит, В | 12…24 |
|---|---|
| Максимальный ток двигателя, А | 12 |
| Защита от короткого замыкания, А | 30 |
| Защита двигателя от перегрузки, А | 16 |
| Максимальное напряжение на двигателе | 0,98 Uпит |
| Диапазон регулировки скорости двигателя | в 10-20 раз, (в зависимости от модели двигателя) |
Скачать описание
Заказать
Снят с производства
Описание блоков управления коллекторным двигателем постоянного тока BMD
Контроллеры BMD разработаны для управления работой коллекторных двигателей постоянного тока с напряжением питания до 24В. Блок управляет скоростью и направлением вращения мотор-редуктора постоянного тока с номинальным током до 12А.
Контроллеры серии BMD сняты с производства, взамен поставляются контроллеры BMD-20DIN.
Блок управляет скоростью и направлением вращения мотор-редуктора постоянного тока с номинальным током до 12А.
Контроллеры серии BMD сняты с производства, взамен поставляются контроллеры BMD-20DIN.
Предусмотрен аналоговый задатчик скорости — внешний сигналом (0…+5)В или встроенный потенциометр. Запуск двигателя осуществляется по заднему фронту управляюшего сигнала START/STOP, реверс выполняется по изменению уровня управляющего сигнала DIR.
Управление скоростью:
- аналоговым сигналом
- напряжение: 0 — 5В;
- сопротивление: 720 Ом;
- встроенным потенциометром
Управление направлением
Направление вращения в момент запуска зависит от полярности подключения двигателя к блоку. В ходе работы направление вращения меняется сигналом «Направление» — типа сухой контакт.
Управление коллекторным двигателем постоянного тока с электромагнитным тормозом.
Габаритные размеры блоков управления коллекторным двигателем постоянного тока BMD
Задать вопрос
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Что такое коммутатор? — Советы по управлению движением
Вы здесь: Главная / Двигатели / Двигатели постоянного тока / Что такое коммутатор?
Даниэль Коллинз Оставить комментарий
Принцип работы двигателя постоянного тока основан на взаимодействии между магнитным полем вращающегося якоря и магнитным полем неподвижного статора. Поскольку северный полюс якоря притягивается к южному полюсу статора (и наоборот), на якорь действует сила, заставляющая его вращаться. Коммутация — это процесс переключения поля в обмотках якоря для создания постоянного крутящего момента в одном направлении, а коммутатор — это устройство, соединенное с якорем, которое обеспечивает такое переключение тока.
Поскольку северный полюс якоря притягивается к южному полюсу статора (и наоборот), на якорь действует сила, заставляющая его вращаться. Коммутация — это процесс переключения поля в обмотках якоря для создания постоянного крутящего момента в одном направлении, а коммутатор — это устройство, соединенное с якорем, которое обеспечивает такое переключение тока.
Изображение предоставлено: Государственный университет Джорджии
Основная цель коммутации — обеспечить, чтобы крутящий момент, действующий на якорь, всегда был в одном направлении. Напряжение, создаваемое в якоре, носит переменный характер, а коммутатор преобразует его в постоянный ток. Проще говоря, коммутатор включает и выключает катушки, чтобы контролировать, в каком направлении указывают электромагнитные поля. С одной стороны катушки электричество всегда должно течь «от себя», а с другой стороны электричество всегда должно течь «навстречу». Это гарантирует, что крутящий момент всегда создается в одном и том же направлении. В противном случае катушка повернется на 180 градусов в одну сторону, а затем изменит направление.
Проще говоря, коммутатор включает и выключает катушки, чтобы контролировать, в каком направлении указывают электромагнитные поля. С одной стороны катушки электричество всегда должно течь «от себя», а с другой стороны электричество всегда должно течь «навстречу». Это гарантирует, что крутящий момент всегда создается в одном и том же направлении. В противном случае катушка повернется на 180 градусов в одну сторону, а затем изменит направление.
Отличное визуальное представление того, как ток переключается из-за положения катушек и щеток, см. в этой статье Университета Юты.
Сам коммутатор представляет собой разъемное кольцо, обычно изготовленное из меди, причем каждый сегмент кольца прикреплен к каждому концу катушки якоря. Если якорь имеет несколько катушек, коммутатор также будет иметь несколько сегментов — по одному на каждый конец каждой катушки. Подпружиненные щетки расположены с каждой стороны коммутатора и соприкасаются с коммутатором при его вращении, снабжая сегменты коммутатора и соответствующие катушки якоря напряжением.
Когда щетки проходят через зазоры в коммутаторе, подаваемый электрический заряд переключает сегменты коммутатора, что меняет электрическую полярность катушек якоря. Это переключение полярности в катушках поддерживает вращение якоря в одном направлении. Напряжение между щетками колеблется по амплитуде между нулем и максимальным значением, но всегда сохраняет одну и ту же полярность.
Как упоминалось ранее, коммутатор состоит из сегментов, которые изолированы друг от друга. Когда щетки переходят от одного сегмента к другому, наступает момент, когда щетки соприкасаются с обоими сегментами одновременно. Это называется нейтральной плоскостью, и в этой точке индуцированное напряжение равно нулю. В противном случае щетки замкнули бы концы катушки вместе и вызвали искрение из-за высокого напряжения.
Термин «щетки» был придуман на заре двигателей постоянного тока, когда они были сделаны из жил медной проволоки.
Важно отметить, что приведенное выше обсуждение относится к традиционным коллекторным двигателям постоянного тока, которые коммутируются механически. Бесщеточные двигатели постоянного тока также требуют коммутации, но для бесщеточных конструкций коммутация осуществляется электронным способом с помощью энкодера или датчиков Холла, которые отслеживают положение ротора, чтобы определить, когда и как подавать питание на катушки.
Автор изображения: Groschopp, Inc. Что такое коммутация? Чтобы создать движение в трехфазном линейном двигателе, должно быть переключение между фазами для подачи питания на соответствующие обмотки. Процесс переключения между фазами называется коммутацией. Чтобы создать желаемое движение, контроллер должен определить, какая фаза должна быть включена. Самый популярный метод определения того, где находится силовая установка в пределах магнитного поля, — это датчик на эффекте Холла. Для понимания процесса коммутации может помочь круговая диаграмма. Ток, протекающий через катушку, имеет форму синуса. Компонент Y стрелки на круговой диаграмме ниже определяет величину этого тока. Когда стрелка делает полный оборот, величина соответствует синусоидальному закону. Токи сдвинуты по фазе на 120 градусов, что показано тремя стрелками, расположенными на одинаковом расстоянии друг от друга на 360 градусов. Существует несколько способов определения положения (электромагнитных) катушек над магнитной дорожкой (или ротором). Преимущества и риски Простой способ «выровнять» ток через катушки с постоянными магнитами — использовать датчик Холла. Датчики Холла могут быть аналоговыми или цифровыми. Аналоговые датчики Холла точно измеряют магнитное поле. Сигнал будет сильнее, если центр находится над полюсом магнита. Магнит-фи05++++++++++++++++++++++++++++++++++++++++++++++++++ +++++++++++++++++++++++++поле равно нулю при измерении между двумя противоположными полюсами. Цифровые датчики Холла измеряют только положительный (северный) или отрицательный (южный) полюс магнита. Они показывают цифровое значение, означающее «1» или «0». Когда цифровой датчик Холла находится над полюсом своего типа (северным или южным), он подает сигнал. Процесс коммутации в синхронном двигателе представляет собой переключение между фазами. Можно переключаться между фазами таким образом, чтобы обмотка поочередно притягивала и отталкивала постоянные магниты для создания желаемого движения по закону Лоренца. Все двигатели Tecnotion Iron Core, Ironless и Torque представляют собой трехфазные синхронизированные двигатели. При переменном токе направление магнитного поля в катушках меняется на противоположное. Взаимодействие этого магнитного поля с дорожкой постоянного магнита (или ротором) создает движение. Подводя итог тому, что необходимо для эффективного перемещения линейного или моментного двигателя: коммутация фаз тока и опционально датчик Холла. 3 фазы тока необходимо постоянно контролировать, чтобы генерировать движение. Что такое коммутация? | Технические документы Tecnotion
 Если детализация и точность энкодера (линейки) не требуются, для измерения положения катушки можно использовать аналоговый датчик Холла. Для коммутации тока используются цифровые датчики Холла.
Если детализация и точность энкодера (линейки) не требуются, для измерения положения катушки можно использовать аналоговый датчик Холла. Для коммутации тока используются цифровые датчики Холла.