Управление скоростью вращения двигателем постоянного тока
В прошлом в тяговых системах для управления двигателями постоянного тока использовались контроллеры с мпульсным управлением и разомкнутым контуром регулирования. В настоящее время в тяговых системах в основном используются только асинхронные двигатели. В системах малой мощности, и особенно в сервосистемах, часто встречается импульсное управление с замкнутым контуром регулирования. Наибольшее распространение получили двигатели постоянного тока с постоянными магнитами. Встречаются также и моторы с независимым возбуждением, но в данной статье будут рассмотрены только двигатели с постоянными магнитами.
Поиск данных по Вашему запросу:
Управление скоростью вращения двигателем постоянного тока
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов двигателя постоянного тока на ШИМ контроллереСодержание:
- Двигатель постоянного тока, L293D и Arduino
- Вы точно человек?
- FAQ по электродвигателям
- Плавная регулировка оборотов электродвигателя 220в переменного тока
- Способы управления электродвигателями
- Регулирование скорости вращения коллекторного двигателя постоянного тока
- Вы точно человек?
- Решение задач по ТОЭ, ОТЦ, Высшей математике, Физике, Программированию…
- Главное меню
Двигатель постоянного тока, L293D и Arduino
В статье рассмотрен пример управления направлением и скоростью вращения ротора небольшого двигателя постоянного тока с использованием Arduino и чипом для драйвера двигателя LD. Для управления скоростью вращения мотора в проекте используется потенциометр. Для изменения направления вращения используется кнопка. Перед тем как подключать Arduino для управления мотором, стоит поэксперрментировать с чипом LD. Как минимум, это даст вам понимание того, как именно он работает.
В данном случаем мы можем использовать Arduino исключительно для подачи питания 5 В на мотор. Наша задача — отследить, в какую сторону вращается ротор мотора. Можете слегка зажать вал пальцами, и вы почувствуете направление вращения или прикрепить на вал какую-то метку например, кусок бумажки.
После первой проверки, подключите контакты, которые идут от 5V питания и от Gnd земля наоборот.
Схема подключения соответствует приведенной на рисунке ниже. Они подключаются к контакту 5V или к контакту GND с использованием фиолетового, желтого и оранжевого коннектора.
Как показано на рисунке выше, мотор должен вращаться в определенном направлении, давайте назовем это направлением A. Контакт Enable все включает и выключает. Это очень полезно при использовании ШИМ контактов для управления скоростью мотора. Переподключите Pin 1 к 5V, чтобы двигатель вновь начал вращаться.
Теперь попробуйте переподключить In1 pin 2, желтый. Вместо 5V подключите его к GND. Если вы подключите In1 обратно к 5V и в результате In1 и In2 будут подключены к 5V, мотор опять-таки перестанет двигаться. После того как мы разобрались с непосредственным управлением двигателя с помощью контактов и микросхемы LD , можно передавать все управление на плату Arduino.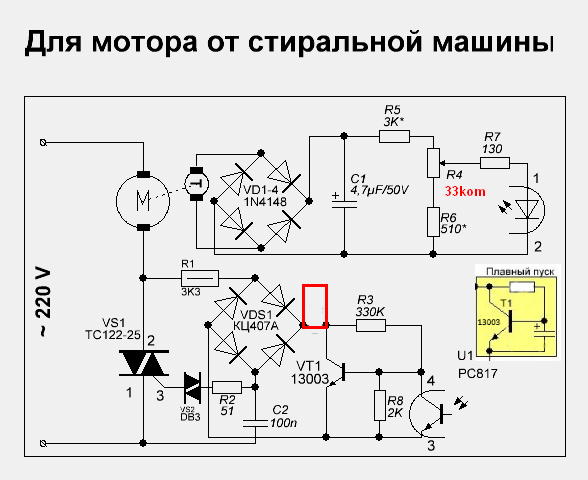
Микроконтроллер в данном случае будет управлять контактами Enable, In1 и In2. Внимательно соберите схему на основании рисунка, который приведен ниже. Если вы перепутаете контакты, очень вероятно, что работать ничего не будет. Скорость определяется с помощью деления аналоговых значений потенциометра на 4. Мы делим именно на 4, так как аналоговые значения с контакта потенциометра будут в диапазоне между 0 и А на выход для управления двигателем должны подаваться аналоговые значения в диапазоне между 0 и Если кнопка нажата, мотор будет двигаться вперед, если не нажата — в противоположном направлении.
Так что если кнопка нажата, значение равно False, в другом случае значение равно True. Сначала скорость устанавливается с использованием analogWrite на контакт enable. Контакт enable на драйвере L просто включает-выключает мотор в зависимости от настроек пинов in1 и in2 на чипе L Для управления направлением вращения мотора, пины in1 и in2 должны иметь противоположные значения.
Это значит, что оно всегда будет противоположно значению, которое генерится на Arduino для in1. LD — очень полезный чип. Основное его достоинство — возможность управления двумя двигателями одновременно. В нашем примере мы используем только половину его возможностей для управления один двигателем постоянного тока.
LD — очень полезный чип. Основное его достоинство — возможность управления двумя двигателями одновременно. В нашем примере мы используем только половину его возможностей для управления один двигателем постоянного тока.
Большинство контактов с правой стороны чипа смотрите рисунок ниже предназначены для одновременного управления вторым двигателем. Вам также понадобятся еще три контакта для управления. Оба этих контакта мы подключаем к пину 5V на Arduino 5V. Если же вы используете более мощные моторы и моторы, которые требуют для питания большее напряжение, надо обеспечить отдельную подачу питания для мотора.
При этом пин 8 подключается к позитивному контакту источника питания, а земля второго источника питания — к земле на Arduino. Соответственно, чип LD можно использовать и для управления шаговыми двигателями. Подробная инструкция. Вы можете изменить скетч таким образом, чтобы управлять мотором без использования потенциометра или кнопки-переключателя.
Можно начать с медленного вращения ротора двигателя в заданном направлении, постепенно увеличивать скорость, уменьшать ее и после обеспечить вращение в противоположном направлении. Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Всегда рады конструктивному сотрудничеству. Со всеми вопросами, пожеланиями и предложениями обращайтесь на почту a. Двигатель постоянного тока, LD и Arduino В статье рассмотрен пример управления направлением и скоростью вращения ротора небольшого двигателя постоянного тока с использованием Arduino и чипом для драйвера двигателя LD.
Вы точно человек?
В связи с развитием полупроводниковой техники все шире применяется импульсное управление исполнительным двигателем. Суть его заключается в том, что частоту вращения двигателя регулируют не величиной постоянно подводимого напряжения, а длительностью питания двигателя номинальным напряжением. Одна из возможных схем импульсного управления приведена на рис. Там же рис. В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель, ток якоря увеличивается, двигатель развивает положительный момент и частота вращения возрастает; когда электронный ключ закрыт, ток под действием запаса электромагнитной энергии продолжает протекать в том же направлении но через обратный диод. При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.
При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.
Стабилизация скорости вращения АД по сигналу энкодера . Управление скоростью коллекторных двигателей постоянного тока (ДПТ). Управление энергией общей шины постоянного тока .
FAQ по электродвигателям
Если посылка не пришла в указанный срок или ее качество не соответствует заявленному мы вернем вам полную стоимость товара. Наши специалисты на связи 24 часа. Приветливые менеджеры ответят на все ваши вопросы, помогут открыть спор и разобраться с оплатой. Мы всегда на стороне покупателя, вы можете вернуть товар или деньги в случаях: 1. Не соответствует описанию 2. Ненадлежащего качества 3. Не приехал. Главная Электроника Аксессуары и запчасти Другое. Описание товара. Комплект поставки: 1 контроллер скорости постоянного тока DC Примечание.
Плавная регулировка оборотов электродвигателя 220в переменного тока
Какие электродвигатели применяются чаще всего? Какие способы управления электродвигателями используются? Как прозвонить электродвигатель и определить его сопротивление? Как определить мощность электродвигателя? Как увеличить или уменьшить обороты электродвигателя?
Содержание [ Показать ] 1. Двигатель постоянного тока 2.
Двигатель постоянного тока 2.
Способы управления электродвигателями
Разработке подлежат следующие вопросы: обоснование выбора типа двигателя и преобразователя, а также его функциональной схемы, расчет и выбор преобразователя и всех элементов силовой цепи, выбор устройств управления и защиты, статический расчет системы, составление структурной схемы, синтез регуляторов по заданным требованиям к динамике системы, обеспечение отсутствия автоколебаний на субгармониках, разработка принципиальной схемы и описание работы схемы и отдельных блоков управления. Данные для расчета системы стабилизации скорости электропривода постоянного тока. Нагрузочная диаграмма и тахограмма электропривода. Расчет мощности и выбор электродвигателя. Расчет силовой части преобразователя. Анализ и синтез линеаризованных структур.
Регулирование скорости вращения коллекторного двигателя постоянного тока
Нажимая на кнопку «Отправить», Вы соглашаетесь на обработку персональных данных. Электропривод, построенный на основе двигателей постоянного тока используются в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности. Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока. Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме.
Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока. Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме.
Без двигателей постоянного тока невозможно представить многие виды для управления скоростью и направлением вращения двигателя с рабочим.
Вы точно человек?
Управление скоростью вращения двигателем постоянного тока
Этот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока , состоит из постоянного магнита на индукторе статоре , одного электромагнита с явно выраженными полюсами на якоре двухзубцового якоря с явно выраженными полюсами и с одной обмоткой , щёточноколлекторного узла с двумя пластинами ламелями и двумя щётками. В первом приближении магнитное поле полюсов статора равномерное однородное. В этом случае крутящий момент равен:.
В первом приближении магнитное поле полюсов статора равномерное однородное. В этом случае крутящий момент равен:.
Решение задач по ТОЭ, ОТЦ, Высшей математике, Физике, Программированию…
ВИДЕО ПО ТЕМЕ: Регулятор оборотов электродвигателя 220ВВойти через. На AliExpress мы предлагаем тысячи разновидностей продукции всех брендов и спецификаций, на любой вкус и размер. Если вы хотите купить 20a pwm регулятор скорости вращения двигателя постоянного тока и подобные товары, мы предлагаем вам позиций на выбор, среди которых вы обязательно найдете варианты на свой вкус. Если конкретные характеристики говорят вам больше, чем непонятные названия, возможно, следующая информация — для вас: по всему объему продукции, найденной по вашему запросу «20a pwm регулятор скорости вращения двигателя постоянного тока», Применение может варьироваться в весьма широком диапазоне, есть Другое , Коммутируемый виртуальный канал , JIW, и каких только еще нет.
Войти через.
Главное меню
Авторам Контакты Партнеры Реклама. Электродвигатели постоянного тока широко применяются в промышленности, на транспорте и в других областях. Какое изобретение двух-трех последних веков вы бы выделили как судьбоносное, главное, на котором базируется всё наше современное техническое благополучие? Возможно, пальму первенства стоит отдать паровой машине. Многие вещи, о которых люди мечтали на протяжении тысячелетий, почти мгновенно воплотились в жизнь после того, как был совершен принципиальный шаг — изобретено сердце для механизмов, двигатель, мотор. Другое дело, что двигатели дают неприятные побочные эффекты — повышают температуру, загрязняют воздух ядовитыми газами, шумят. Однако мы остановим внимание на наиболее экологичной, а значит, и актуальной сегодня разновидности — электродвигателях.
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения. Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель — электрическая машина электромеханический преобразователь , в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком году, установив возможность вращения проводника в магнитном поле.
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель — электрическая машина электромеханический преобразователь , в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком году, установив возможность вращения проводника в магнитном поле.
Как уменьшить скорость вращения двигателя постоянного тока
Содержание
- Регулирование скорости двигателей постоянного тока
- Регулирование частоты вращения электродвигателей
- Подписка на рассылку
- Методы регулирования частоты вращения электродвигателя
- Частотное регулирование
- Регулирование изменением числа пар полюсов
- Изменение питающего напряжения
- Добавочное сопротивление в цепи ротора
- Асинхронный вентильный каскад
- Изменение напряжения питания якоря
- Введение добавочного резистора в цепь якоря
- Регулирование скорости оборотов двигателя постоянного тока
- Методы регулировки
- Заключение
- Как уменьшить частоту вращения электродвигателя
- Простейший вариант
- В цепи якоря
- Для низкого напряжения
- От сети
- Коллекторные машины
- Двухфазный двигатель
- Обычные асинхронники
- Измерения
- Электрика своими руками
- Немного теории об устройстве и области применения коллекторных электродвигателей
- Электродвигатели постоянного тока с параллельным возбуждением
- Электродвигатели постоянного тока с последовательным возбуждением
- Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Электродвигатели коллекторные переменного тока
- Регуляторы оборотов электродвигателя
- Видео
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
Рис.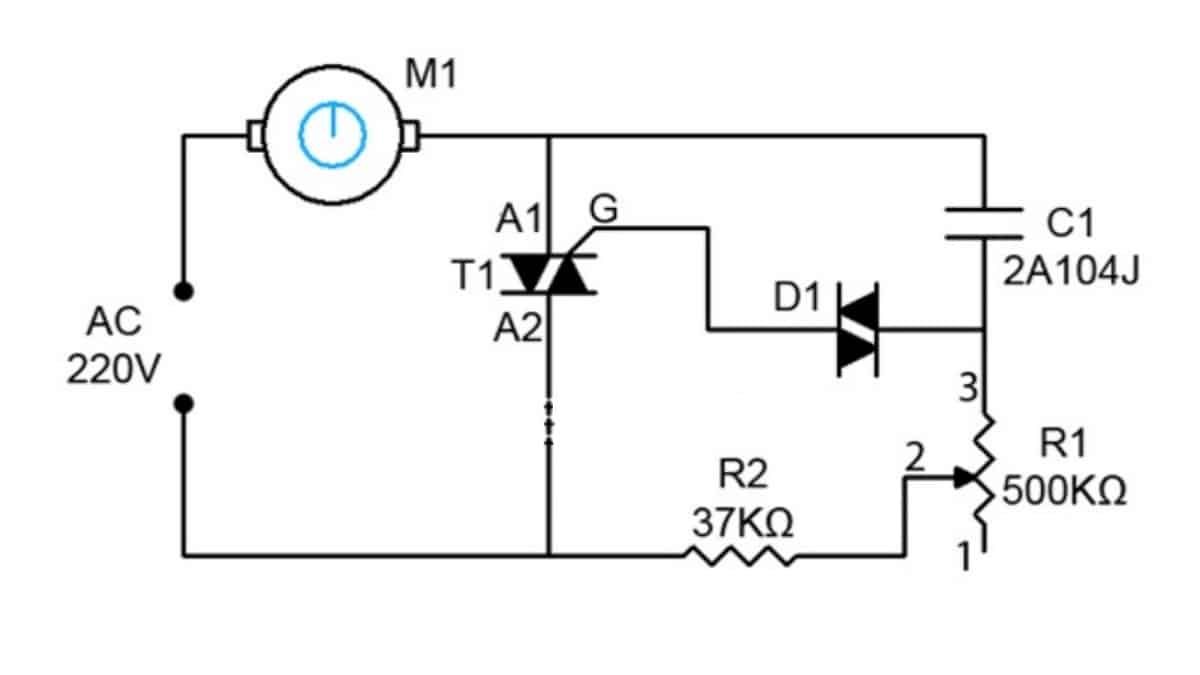 1. Схема включения двигателя постоянного тока независимого возбуждения
1. Схема включения двигателя постоянного тока независимого возбуждения
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости.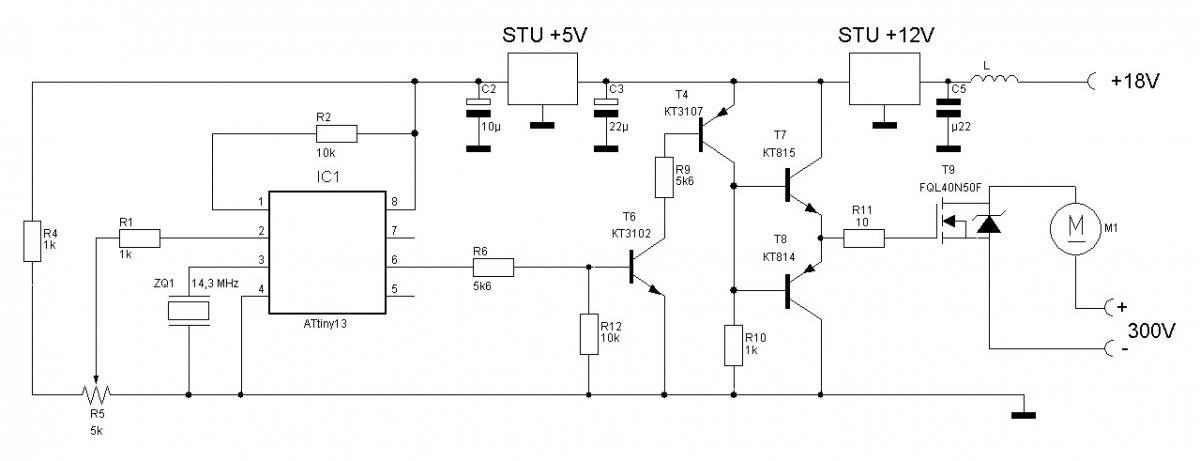 Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Источник
Регулирование частоты вращения электродвигателей
Подписка на рассылку
Порядка 70 % потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.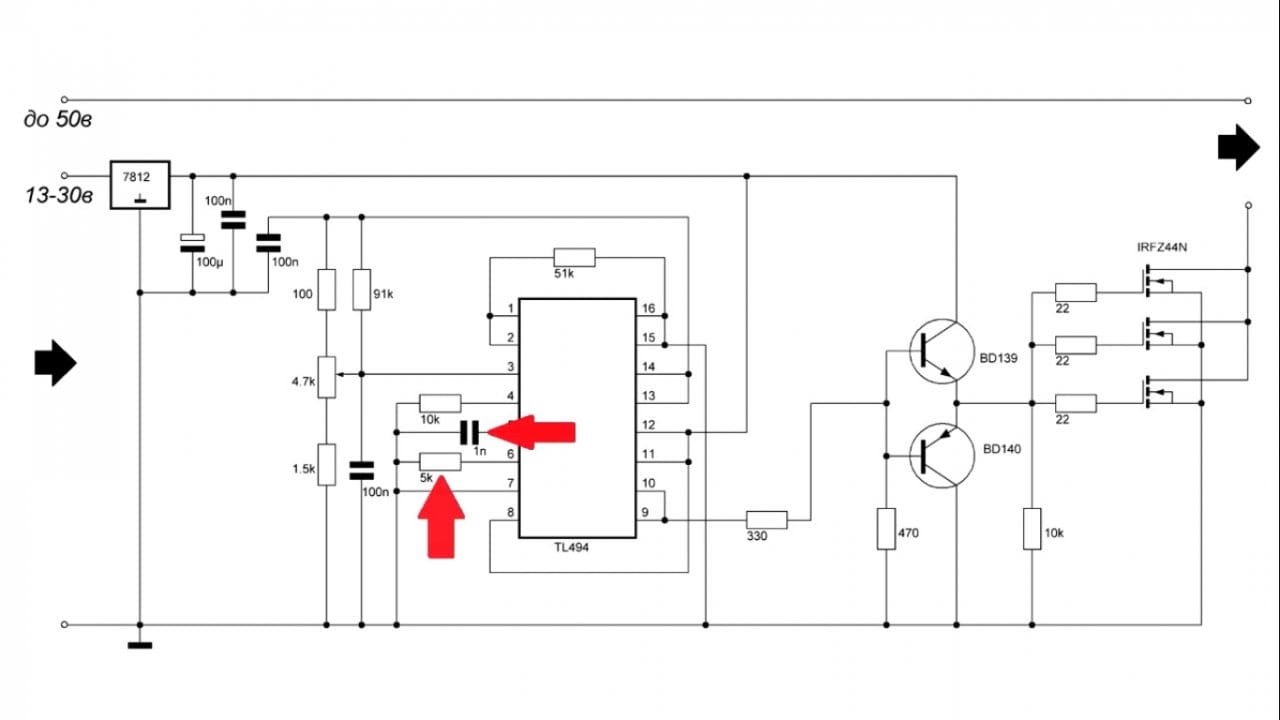
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
Изменяемые параметры для ДПТ:
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ.
Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором).
Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
Регулирование изменением числа пар полюсов
Применение: т. к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки.
Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
Недостатки:
Изменение питающего напряжения
Применение: асинхронные двигатели.
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором.
При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
Недостатки:
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Достоинства:
Недостатки:
Изменение напряжения питания якоря
Применение: любые ДПТ.
Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
Недостатки:
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
Недостатки:
Источник
Регулирование скорости оборотов двигателя постоянного тока
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.
Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.
Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.
Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.
Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически.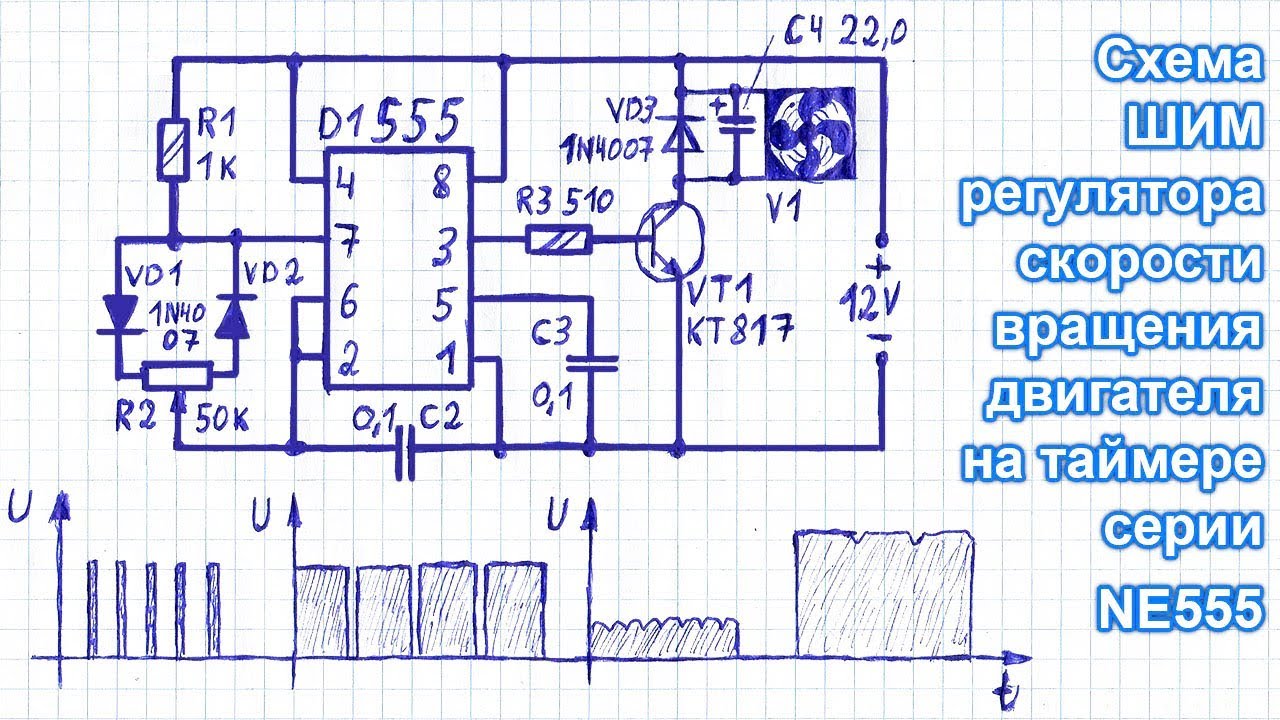 Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Источник
Как уменьшить частоту вращения электродвигателя
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины.
Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Поэтому говорить нужно о каждом случае отдельно.
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убратькрутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания.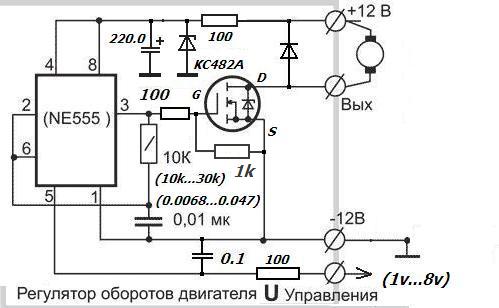 Для этой цели также есть свои решения.
Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.
Электрика своими руками
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях.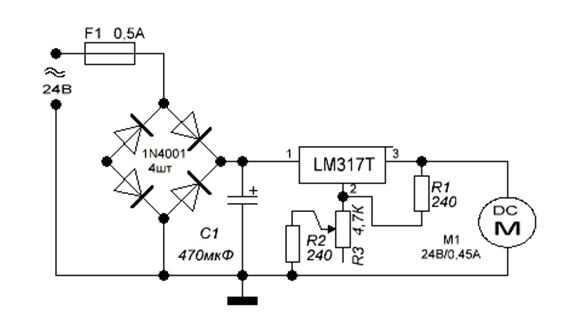 В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
И так, задача понизить частоту,
Двигатель, 2,2 кВт, 380В, 2850 об/мин, звезда. наружу выходят три провода.
Разобрал, изменил подключение на треугольник, подключил на одну фазу. Работает.
Но, желательно было бы понизить обороты, раза в два, тысячи до полторы.
Номинальной мощности мне все равно много, ее падение в два раза не парит ни сколько.
На сколько мне известно, частоту можно изменить основными четырьмя способами:
Изменить напряжение (тут боюсь, 110В его не вытянут)
Редуктор (очень замудренно и сильно увеличивает занимаемую площать)
Изменить кол-во полюсов (внутри только три полюса, подключением обмоток не прокатит)
Изменить частоту питающей сети (само собой, частотники, это дорого)
Об этом лекции можно не копипастить, поиском пользоваться умею.
Смысл в другом. А что, если питание пропустить через диод?
То есть, на одном полюсе урезать частоту?
Были ли у кого-то подобные эксперименты?
Источник
Видео
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
В двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах). Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
- Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки.
 Двигатели постоянного тока имеют высокий пусковой момент.
Двигатели постоянного тока имеют высокий пусковой момент. - Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ)Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555.![]() Вот схема этой цепи:
Вот схема этой цепи:
Выход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении. Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого мы можем использовать схему H-Bridge. Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Принцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-моста:
Конфигурация транзистора H-моста. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D-управление двумя двигателями постоянного токаL293D Описание контактов
| L293D Контакт | Описание | 1 (Включить 1-2) | Управляет левой частью привода |
| 2 (Вход-1) | Контакт входа сигнала |
| 3 (Выход-1) 900 72 | Подключается к одной из клемм двигателя |
| 4 и 5 | Заземление |
| 6 (Выход-2) | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала |
| 8 (Vcc2) | 90 067 Напряжение питания двигателя: должно быть больше 4,5 В|
| 9 (Enable3-4) | Управляет правой частью привода |
| 10 (Вход-3) | Сигнальный входной контакт 90 072 |
| 11 (Выход-3) | Подключается к одной из клемм двигателя |
| 12 и 13 | Заземление |
| 14 (Выход-4) | Подключается к одной из клемм двигателя |
| Контакт входа сигнала | |
| 16 Vss | Источник питания |
Надеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы..jpg.63a87bad5c013386e4fbb043922c184b.jpg)
Регуляторы постоянного тока — Bodine Electric
Перейти к основному содержаниюИмя * Адрес электронной почты * Компания Почтовый индекс *
Продукт Предмет * Сообщение *
Главная > Продукция > Блоки управления постоянного тока
Регуляторы скорости Bodine PMDC преобразуют сетевую мощность переменного тока в необходимый выходной постоянный ток, необходимый для привода двигателей постоянного тока и мотор-редукторов. Мы предлагаем фильтрованные и нефильтрованные силиконовые управляемые выпрямители (SCR) и фильтрованные регуляторы скорости постоянного тока с широтно-импульсной модуляцией (ШИМ). Нефильтрованные регуляторы SCR FPM типа Bodine — это простой и экономичный выбор для регулирования скорости. Они работают от сети 115 В переменного тока и доступны как в виде шасси, так и в закрытом исполнении. Доступны модели SCR без фильтра UPM, которые принимают входное напряжение 115/230 В переменного тока (50/60 Гц), а также 115 В переменного тока (50/60 Гц).