Категория: Управление устройствами В настоящее время практически 60 % всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей. Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но в то же самое время подключать их к однофазной сети и управлять частотой вращения достаточно сложно. Заманчива перспектива, увеличения номинальной частоты вращения двигателя, в двое и более раз или использование малогабаритных двигателей рассчитанных на частоту питающей сети 400-1000 Гц и имеющие меньшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы. Предлагаемая система управления работает от однофазной сети 220вольт и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе. Существует также более перспективный, Широтно Импульсный Метод (ШИМ, PWM — англ.) использующий управление с обратными связями и без них. С частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15-27% по сравнению с питающей сетью т.е. до 354-390 вольт. Схема, изображённая на рисугке выше, состоит из управляющего устройства D2, применен микроконтроллер PIC16F628-20/P работающий на частоте 20 мГц, кнопок управления Пуск (SA1), Стоп (SA2), кнопки увеличения и уменьшения частоты соответственно SA3.SA4. Двоично-семисегментного дешифратора D1, светодиодных матриц HG1,HG2. Узла торможения VT9,VT10,K1. В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы INTERNATIONAL RECTIFIER имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП транзисторы IRF740. Цепь перегрузки состоит из датчика тока R10 делителя напряжения R7-R9 позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6-C3 которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 вольт по входу ITRP (D4). После срабатывания защиты на выходе FAULT (открытый коллектор) появляется логический ноль, зажигается светодиод HL1, и закрываются все силовые ключи. Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, вклюценным в цепь затвора, диодов в обратном направлении. Двигатель необходимо включить по схеме звезды. Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости СЮ, емкость С11 предотвращает всплески, которые будут возникать при коммутациях на паразитных индуктивностях схемы. А также маломощного трансформатора Т1, стабилизатора напряжения 15 вольт D5 для питания схемы драйвера, и стабилизатора напряжения 5 вольт D3 для питания микроконтроллера и схемы индикации. При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT транзисторы типа IRGBC20KD2-S, IRGBC30KD2-S при этом диоды VD7-VD10, VD15.VD16 следует выпаять. Конденсатор С11 должен быть типа К78-2 на 600-1000 Вольт. Вместо VD1-VD6 желательно применить сверх быстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2-4,7 микрофарад, которые должны быть рассчитаны на напряжение 50 вольт. Трансформатор Т1 мощностью 0,5-2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом диаметром 0,2 и должна выдавать 19-20 вольт. HEX формат программы находится в табл. 1. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора. Программа выполнена таким образом что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 секунды, эта константа находится в ячейках 0207 и 0158 таблицы. Если необходимо увеличить скорость нарастания в два раза то вместо кодов 3005 необходимо записать 300А. HEX данные: |
| Поделитесь с друзьями ссылкой на схему: |

 Данная микросхема имеет систему защиты по току которая в случае перегрузки выключает все ключи а также предотвращает одновременное открывание верхних и нижних транзисторов и тем самым предотвращает протекание сквозных токов.
Данная микросхема имеет систему защиты по току которая в случае перегрузки выключает все ключи а также предотвращает одновременное открывание верхних и нижних транзисторов и тем самым предотвращает протекание сквозных токов.
 Печатная плата выполнена на одностороннем стеклотекстолите, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1.HG2, кнопки SA1-SA4 установлены со стороны дорожек.
Печатная плата выполнена на одностороннем стеклотекстолите, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1.HG2, кнопки SA1-SA4 установлены со стороны дорожек.Управление трехфазным двигателем в однофазной сети (PS11036, IRPT2060A, IR2130)
В области силовых приборов “законодателями» являются фирмы INTERNATIONAL RECTIFIER — сокращенно IR и MITSUBISHI Electric — сокращенно ME, а также INFENION Technologies — IT.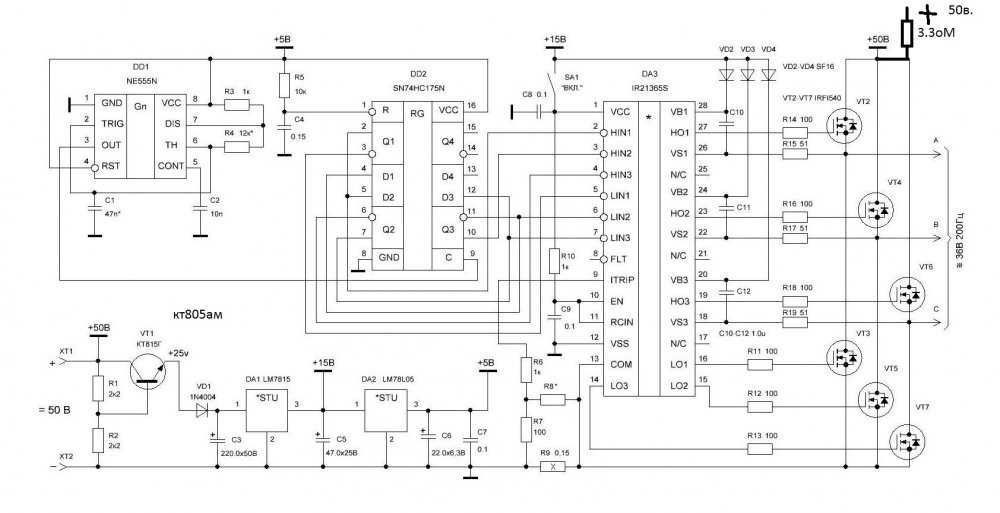
Я привожу наименование фирм-изготовителей для того, чтобы пользователи могли ориентироваться при выборе элементов. Так как, в основном, только эти фирмы занимаются разработкой элементной базы для силовых приводов.
Данная статья поможет многим радиолюбителям применить современные силовые электронные приборы для управления 3-х фазными электродвигателями в однофазной сети.
Схема
На рис. 1 приведена схема электрическая принципиальная электронного привода электродвигателя. Устройство работает следующим образом.
Рис. 1. Схема управления трехфазными двигателями с помощью силовой электроники в однофазной сети.
Задающий генератор DD1 серии NE555 вырабатывает импульсы частотой 360 Гц, поступающие на вывод 9 DD2 (счетный вход) 55БТМ8 (аналог 74175N — четыре D-триггера). В микросхеме используются три D-тригг*ра в качестве схемы, сдвига.
То есть, с их прямых и инверсных выходов выходит трехфазное напряжение управления частотой 60 Гц, которое подается на соответствующие входы микросхемы DA3 IR2130S.
Чтобы электронный привод работал на различных частотах, нужно резистор R2 номиналом 100 кОм заменить на цепочку из постоянного 62 кОм и переменного 56 кОм резисторов.
Микросхема DA3 IR2130S представляет собой шестиканальный высоковольтный драйвер (схема управления) управления выходными ключами фирмы IR. При нажатии на кнопку S1 “Пуск» драйвер управляет как верхними ключами, так и нижними.
Транзисторы VТ1, VТ2, VТ3 — верхние ключи, соответственно VТ4, VТ5, VТ6 — нижние ключи. Питание схемы осуществляется таким образом.
Трансформатор Т1 понижает напряжение сети до 18 В, которое выпрямляется мостом VDS2 и фильтруется конденсаторами С3, С6. Выпрямленное напряжение поступает на стабилизатор DA2 7815.
С выхода DA2 напряжение +15 В служит для питания микросхемы DA3 IR2130. Напряжение +15 В понижается стабилизатором DA1 7805 (КРЕН5) до 5 В, необходимого для питания микросхем DD1, DD2.
Рис. 2. Схема генератора на микросхеме.
Рис. 3. Установка дополнительного резистора.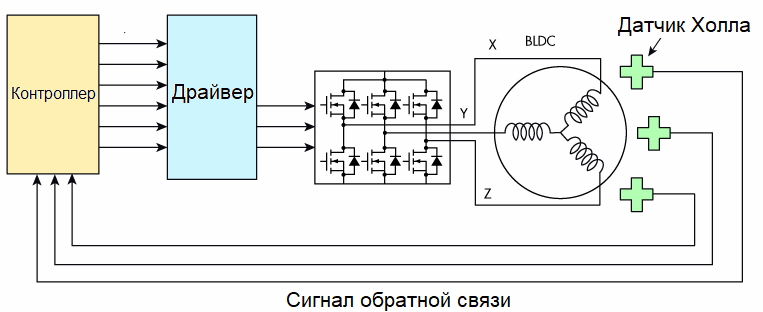
Рис. 4. Схема драйвера.
Внимание! Минусовой провод на схеме показан как “общЕго ни в коем случае нельзя соединять с корпусом прибора. Он должен быть надежно изолирован от корпуса. Сам корпус привода и электродвигатель должны быть надежно заземлены.
При работе с устройством надо соблюдать осторожность, чтобы избежать поражения электрическим током!
Детали
Мост VDS1 должен быть рассчитан на прямой ток 20…25 А и обратное напряжение 400 В. Данные параметры зависят от мощности используемого двигателя. Я рассчитывал на мощность 1.5…2 кВт.
Подходящим является мост КВРС2504 — Іпр. = 25 А и LJo6p. = 400 В. Примененный мост можно, конечно, заменить отечественными мощными диодами, установив их на радиатор, но опять же габариты схемы увеличатся.
Мост VDS2 рассчитан на Uo6p. = 400 В и Іпр.=1 А, например, КЦ405. Диоды VD1, VD2, VD3 должны быть быстродействующими, с ІІобр. не менее 400 В, например, 11DF4 или 10DF6.
Резисторы R6, R8, R10, R12, R13, R14 номиналом 100 Ом, R7, R9. R11 — номиналом 47 Ом. Защитные диоды VD4….VD9 — быстродействующие, с ІІобр. не менее 400 В и выдерживающие прямой импульсный ток более 30 А, например, MUR680.
R11 — номиналом 47 Ом. Защитные диоды VD4….VD9 — быстродействующие, с ІІобр. не менее 400 В и выдерживающие прямой импульсный ток более 30 А, например, MUR680.
Но можно обойтись и без защитных диодов — для этого нужно применить выходные ключи VТ1 …VТб с защитными диодами, встроенными в корпуса транзисторов.
Особое внимание следует обратить на выходные ключи VТ1 ….VТ6 — это транзисторы технологии IGBT — по входу полевой транзистор, т.е. затвор, а по выходу коллектор и эмиттер — это в первом приближении.
То есть IGBT — это смесь полевой и биполярной технологии. Такие транзисторы производят фирмы Infineon: BUP311D, BUP313D, Harris: HGTh30N40C1D, IR: IRG8C30D, IRGBC2GD с защитными (обратны* ми) диодами.
Рис, 5. Схема силового привода с использованием модуля фирмы MITSUBISHI SEMICONDUCTOR PS11036.
Все резисторы на схеме мощностью 0,25 Вт, кроме R15 — проволочный (падение напряжения на кем должно быть не более 0,5 В). Суммарная емкость конденсаторов после выпрямления сетевого напряжения должна быть около 1000 мкФ при нагрузке 2 кВт и более.
На схеме указаны номиналы С7 и С8 по 330 мкФ для случая нагрузки 1,5 кВт. Конденсаторы C10, С11, С12 номиналом 0,1 мкФ обязательно должны быть с малыми диэлектрическими потерями и термостабильными, рассчитанными на напряжение 50 В.
Трансформатор Т1 — мощностью не более 10 Вт. Если возникли трудности с приобретением DD1 NE555, ее можно заменить мультивибратором, собрав на отечественной 555-й серии.
Схема такого генератора показана на рис. 2. Тактовая частота будет определяться формулой:
F = 1/2C1R1,
где:
- С1. Фарад
- R, Ом.
Такой генератор будет работать в диапазоне 45 Гц … 25 кГц. Если такой широкий диапазон генерирования не нужен, то вместо переменного резистора R1 номиналом в 510 Ом нужно установить цепочку из резистора номиналом 100 Ом и 470 Ом (рис.
3). Выходные ключи VТ1….VТ6 обязательно надо установить на теплоотвод через электроизоляционные теплопроводные прокладки (подойдет слюда от больших конденсаторов), иначе у конструктора возникнут трудности с теплоотводом и электроизоляцией.
Фирма JR об этом позаботилась и разработала силовые модули в широком ассортименте. В частности для однофазной сети были разработаны модули типов IRPT2060A на мощность нагрузки 2,2 кВт и IRPT2064A на мощность нагрузки 1,5 кВт (рис. 4).
В модуле, кроме силовых ключей, еще установлены силовой мост, токоизмерительные шунты (выводы IS1, IS2 и IS3, IS4) для IRPT2060A номиналом по 25 мОм (для IRPT2064A — номиналом по 45 мОм), терморезистор (выводы RT1 и RT2), имеющий значение 50 кОм ±5% при температуре модуля 25°С и 3,1 кОм при температуре 100°С для обоих модулей. В модуле еще установлен ключ (выводы BR и N). Он такой же мощный, как и шесть ключей, и предназначен для аварийного отключения модуля.
Я не стал с ним экспериментировать. Все ключи изолированы от корпуса модуля так, что отпадает проблема надежной теплоизоляции, хотя и в этом случае она не помешает при длительной работе модуля.
На рис. 5 приведена схема силового привода с использованием модуля фирмы MITSUBISHI SEMICONDUCTOR PS11036 мощностью 2,2 кВт. Эта схема самая простая в управлении.
Эта схема самая простая в управлении.
Правда, модули такого типа для однофазной сети я не смог найти. Но ведь можно включит и таким образом, как показано на схеме. Вывод FO — выход сигнала об аварии.
Вывод Vamp — напряжение, усиленное в 10 раз с токового резистора нагрузки. Диапазон изменения напряжения на выходе Vamp составляет 0…5 В.
К нему можно подключить, например, вольтметр и измерять косвенно ток в нагрузке. Еще хочу напомнить, что на схеме минусовый провод показан как общий, но его ни в коем случае нельзя соединять с корпусом устройства.
В. Хрипченко. пос. Октябрьский Белгородской обл. РМ-07-17.
3-фазный драйвер бесщеточного двигателя — TMC6300 — ROB-21220
Этот продукт имеет ограничения на доставку, поэтому он может иметь ограниченные варианты доставки или не может быть отправлен в следующие страны:
- Дом
- Категории продуктов
- Спарккс
- 3-фазный бесщеточный двигатель — TMC6300
Нет в наличии РОБ-21220 Аппаратное обеспечение с открытым исходным кодом
$ 19,95
Наличие на складе
Примечание:
В настоящее время у нас нет оценки того, когда этот продукт снова появится на складе. Уведомить меня
Уведомить меня
Примечание: Если этот товар доступен для заказа, его цена может быть изменена в любое время; Кроме того, мы не можем гарантировать сроки доставки или наличия.
Избранное Любимый 4
Список желаний
Нет в наличии РОБ-21220 Аппаратное обеспечение с открытым исходным кодом
$ 19,95
Примечание:
В настоящее время у нас нет оценки того, когда этот продукт снова появится на складе. Уведомить меня
Примечание: Если этот товар доступен для заказа, его цена может быть изменена в любое время; Кроме того, мы не можем гарантировать сроки доставки или наличия.
- Описание
- Функции
- Документы
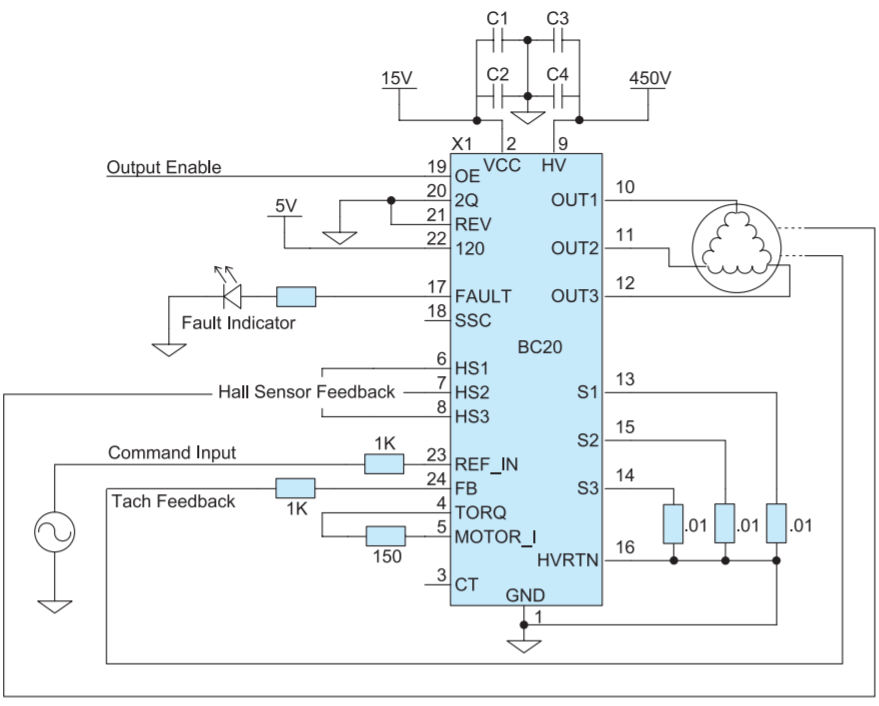
TMC6300 от Trinamic — это мощный, но простой в использовании драйвер трехфазного бесщеточного двигателя постоянного тока (BLDC). Отдельные элементы управления высокой и низкой стороны обеспечивают невероятное управление током до 2 А. Драйвер защищен от перегрева и короткого замыкания с помощью диагностического выходного контакта для индикации системных проблем. При рабочем напряжении до 2 В TMC6300 подходит для устройств с батарейным питанием.
Отдельные элементы управления высокой и низкой стороны обеспечивают невероятное управление током до 2 А. Драйвер защищен от перегрева и короткого замыкания с помощью диагностического выходного контакта для индикации системных проблем. При рабочем напряжении до 2 В TMC6300 подходит для устройств с батарейным питанием.
Мы разработали инновационную двустороннюю четырехслойную разделительную доску, максимально упрощающую подключение. Плата монтируется светодиодами и этикетками вверх, микросхемой вниз. Это позволяет получить доступ к термопрокладке на плате, если требуется охлаждение.
Управление трехфазными двигателями постоянного тока не является тривиальной задачей. Для этой платы требуется шесть сигналов ШИМ для полного управления одним двигателем. Мы обнаружили, что библиотека Arduino Simple Field Oriented Control очень хороша. Пример разомкнутого контура в сочетании с шестиканальным методом ШИМ и на каждый вывод ШИМ на Arduino Uno позволяет этой плате работать. Обратите внимание на пары контактов ШИМ, которые необходимо использовать.
Обратите внимание на пары контактов ШИМ, которые необходимо использовать.
Эта плата была разработана для управления нашим трехфазным бесколлекторным двигателем стабилизатора карданного подвеса, но может использоваться с любым трехфазным двигателем до 2 А.
Экспериментальный продукт: Продукты SparkX быстро производятся, чтобы предоставить вам самые передовые технологии по мере их появления. Эти продукты протестированы, но не имеют никаких гарантий. Техническая поддержка в режиме реального времени недоступна для продуктов SparkX. Зайдите на наш форум, чтобы получить поддержку или задать вопрос.
- Микросхема драйвера: TMC6300
- Входное напряжение: 2-11 В
- Максимальный ток: 2 А
- Рабочий ток: 7 мА
- Ток в режиме ожидания: 30 нА
- Защита: отключение при перегреве, отключение при коротком замыкании
- Комментарии 0
- Отзывы 0
Пока нет отзывов.
Блок управления двигателем Документация
Основное содержание
Страница, которую вы искали, не существует. Используйте окно поиска или просмотрите темы ниже, чтобы найти нужную страницу.
Разработка и реализация управления двигателем алгоритмы
- Примечания к выпуску
- Документация в формате PDF
- Примечания к выпуску
- Документация в формате PDF
Motor Control Blockset™ содержит блоки Simulink ® и справочные примеры для разработки и развертывания двигателя.
алгоритмы управления в виде оптимизированного кода C и HDL на целевых микроконтроллерах, ПЛИС или
системы на кристалле (SoC). Создавайте алгоритмы управления двигателем с Кларком и Парком
преобразование, максимальный крутящий момент на ампер (MTPA), шестиступенчатая коммутация и справочная таблица
(LUT) блоки управления ослаблением поля. Вы можете обрабатывать сигналы от энкодеров,
датчики Холла и резольверы с блоками сенсорных декодеров или реализуют бессенсорные
управление с блоками оценки для вычисления положения и скорости ротора. Блоки
сгенерировать код, который можно использовать в рабочих процессах с использованием MISRA C™ и ISO ® 26262 стандарты функциональной безопасности.
Вы можете обрабатывать сигналы от энкодеров,
датчики Холла и резольверы с блоками сенсорных декодеров или реализуют бессенсорные
управление с блоками оценки для вычисления положения и скорости ротора. Блоки
сгенерировать код, который можно использовать в рабочих процессах с использованием MISRA C™ и ISO ® 26262 стандарты функциональной безопасности.
Справочные примеры, включенные в набор блоков управления двигателем, помогут вам понять, как разрабатывать, настраивать и проверять управление двигателем
алгоритмы с использованием настольного моделирования и моделирования в реальном времени. Примеры включают алгоритмы для
управление двигателем с обратной связью для асинхронных двигателей, вентильных реактивных двигателей (SRM),
синхронные двигатели, такие как бесщеточные двигатели постоянного тока (BLDC), а также для поверхностного и внутреннего монтажа.
синхронные двигатели с постоянными магнитами (СДПМ). Вы можете повторно использовать одни и те же алгоритмы для
генерировать готовый к производству, компактный и отслеживаемый код с фиксированной или плавающей запятой. Ты
также можно использовать справочные примеры для реализации алгоритмов управления двигателем
аппаратные комплекты, поддерживаемые набором блоков.
Вы можете повторно использовать одни и те же алгоритмы для
генерировать готовый к производству, компактный и отслеживаемый код с фиксированной или плавающей запятой. Ты
также можно использовать справочные примеры для реализации алгоритмов управления двигателем
аппаратные комплекты, поддерживаемые набором блоков.
Изучить основы блока управления двигателем
Примеры устройств и систем для приложений управления двигателем
Вычислить смещения для положения, тока и напряжения
Вычислить предполагаемые параметры двигателя и создать модель объекта
Создать алгоритм контроллера для системы управления двигателем
Развертывание и проверка системы управления двигателем
Решение проблем, связанных с нестандартным оборудованием
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в командном окне MATLAB.
Веб-браузеры не поддерживают команды MATLAB.