
Урок №2 Виды нагрузок в системе электропривода
Похожие презентации:
Урок №3 Энергетический баланс для механической части электропривода
Экзамен по дисциплинам «Электропривод»
Курс лекций. Электрический привод
Переходные процессы в электроприводе
Электрический привод
Электропривод и его функциональная схема. Введение в дисциплину
Электропривод в современных технологиях
Классификация специальных электрических машин
Асинхронные двигатели
Теория тяги. Пособие по подготовке машинистов электропоездов метрополитена
1. Электропривод
Проверка домашнего задания урока № 11. Определение электропривода и его структурная схема
2. Электропривод
Урок № 2Тема: Виды нагрузок в системе
электропривода
3. Электропривод
Виды нагрузок в системе электроприводаПлан
1. Механические характеристики производственных
механизмов.
2. Механические характеристики электродвигателей.

3. Приведение статических моментов и моментов
инерции к одному валу.
4. Решение задач.
5. Домашнее задание.
4. Электропривод
1. Механические характеристики производственных механизмовЗависимость между приведенными к валу двигателя скоростью и моментом
сопротивления механизмов = f (Мс) называют механической
характеристикой производственного механизма.
Различные производственные механизмы обладают различными механическими характеристиками. Однако, множество механических характеристик
рабочих машин можно получить соотношением (формулой Бланка):
М с М о (М с,ном М о )( / ном ) х
Приведенная формула позволяет классифицировать механические характеристики производственных механизмов на четыре группы.
1. Не зависящая от скорости механическая характеристика. При этом х = 0 и момент сопротивления не зависит от скорости.
Такой характеристикой обладают: подъемные
краны, лебедки, лифты, поршневые насосы, конвейеры ленточные, механизмы подач станков.

5. Электропривод
1. Механические характеристики производственных механизмов2. Линейно — возрастающая механическая характеристика. В этом случае
х = 1 и момент сопротивления линейно зависит от скорости – увеличивается
при ее возрастании.
Такай характеристикой обладает установка с генератором постоянного
тока независимого возбуждения при постоянном сопротивлении.
3. Нелинейно – возрастающая механическая характеристика. Для такой
характеристики х = 2, момент сопротивления зависит от квадрата скорости. Она еще называется
вентиляторной. Ею обладают центробежные вентиляторы и центробежные насосы.
4. Нелинейно – спадающая механическая характеристика. Х = -1 – момент сопротивления изменяется обратно – пропорционально скорости, а
мощность, потребляемая механизмом, остается
постоянной. Такой характеристикой обладают главные привода токарных, фрезерных, сверл. станков.
6. Электропривод
2. Механические характеристики электродвигателейМеханической характеристикой электродвигателя называется зависимость
его угловой скорости от момента на валу = f (М).
Различают механические характеристики электродвигателя естественные
и искусственные. У каждого электродвигателя естественная характеристика
только одна, которая соответствует номинальному напряжению при отсутствии
внешних резисторов в цепях его обмоток. Искусственных механических характеристик у электродвигателя множество.
Естественные характеристики электродвигателя следующие:
1 – синхронный двигатель,
2 – двигатель постоянного тока независимого
возбуждения,
3 – асинхронный двигатель,
4 – двигатель постоянного тока с последовательным возбуждением.
7. Электропривод
2. Механические характеристики электродвигателейПочти все электродвигатели обладают тем свойством, что их механические
характеристики имеют спадающий вид.
Основные отличия в характеристиках заключаются в степени изменения
скорости с изменением момента и характеризуются жесткостью.
Жесткость характеристики ( )– это отношение разности моментов, развиваемых электродвигателем к соответствующей разности угловых скоростей
= (М2 – М1) / ( 2 — 1) = М / .
 На рабочих участках механические
На рабочих участках механическиехарактеристики двигателей имеют отрицательную
жесткость ( < 0).
Линейные механические характеристики обладают
постоянной жесткостью.
В случае нелинейности характеристик их жесткость
не постоянна и определяется в каждой точке как производная момента по угловой скорости
= dМ / d .
8. Электропривод
2. Механические характеристики электродвигателейПонятие жесткости применяется и к механическим характеристика производственных механизмов с = dМс / d .
Механические характеристики двигателей подразделяются на четыре группы:
1. Абсолютно жесткая характеристика ( = ) – синхронный двигатель.
2. Жесткая механическая характеристика ( ) – двигатель постоянного
тока независимого возбуждения и асинхронные двигатели на рабочем
участке механической характеристики.
3. Мягкая механическая характеристика ( 0) –
двигатель постоянного тока последовательного
возбуждения.
4. Абсолютно мягкая характеристика ( = 0) – асинхронные двигатели при критическом скольжении.

9. Электропривод
3. Приведение статических моментов и моментов инерции к одному валуВ большинстве случаев электродвигатель приводит в действие рабочий
механизм через систему передач, отдельные элементы которой движутся с
разными скоростями.
Механическая часть электропривода может представлять собой сложную
кинематическую схему.
Совокупность всех элементов, которые участвуют в движении
электропривода, называют кинематической схемой.
10. Электропривод
3. Приведение статических моментов и моментов инерции к одному валуКаждый из элементов кинематической схемы обладает упругостью, т.е.
может деформироваться под нагрузкой, в соединительных элементах есть
воздушные зазоры. Если учитывать все эти факторы, то расчетная схема
механической части привода будет представлена многомассовой механической
системой с упругими связями и зазорами, расчет динамики которой
представляет большие трудности и возможен только посредством ЭВМ.

В практических случаях, не требующих большой точности, можно
пренебречь зазорами и упругостью и принять механические связи абсолютно
жесткими. При таком допущении движение одного элемента дает полную
информацию о движении всех элементов (т.к. передаточные числа известны).
Обычно в качестве элемента, на котором рассматривают движение всего
привода, принимают вал двигателя.
Тогда расчетную схему механической части привода
можно представить одним обобщенным жестким механическим звеном.
11. Электропривод
3. Приведение статических моментов и моментов инерции к одному валуНа приведенных схемах момент инерции эквивалентной массы
z2
J2
2
J J Д J1 2 m i
z1
i
RБ
i
Электромагнитный момент двигателя – М.
Суммарный, приведенный к валу двигателя момент сопротивления
(статический момент), включающий все механические потери в системе, в том
числе механические потери в двигателе
Мс = Мс.рм /(i• п), Мс = Fио• / п, где i = i1•i2•i3 – передаточное число сист.

= 1• 2• 3 – КПД системы.
12. Электропривод
3. Приведение статических моментов и моментов инерции к одному валуПри спуске груза его уменьшающаяся энергия передается к двигателю,
частично расходуясь на преодоление потерь в кинематической схеме. В силу
этого к двигателю поступает меньшее количество энергии и формулы для
расчета момента сопротивления принимают следующий вид:
Мс = Fио• • — для случая, когда задано усилие, развиваемое исполнительным органом,
Мс = Мио• / i – при вращательном движении.
Приведенный момент сопротивления Мс также называют статическим
моментом или моментом нагрузки.
Момент двигателя М и момент сопротивления Мс могут иметь как
положительные, так и отрицательные знаки
М Мс = J•d / dt.
Правило, по которому определяются эти знаки, следующее: если
направление действия момента совпадает с направлением скорости, то такой
момент считается положительным и наоборот. Левая часть уравнения в теории
электропривода получила название динамического момента Мдин = М – Мс.

13. Электропривод
4. Решение задачЗадача
Исходные данные:
момент инерции двигателя
Jд = 0,1 кг•м*2;
момент инерции муфты 3 и шестерни 5
J1 = 0,02 кг•м*2;
момент инерции шестерни 6, муфты 7 и барабана 8
J2 = 2,0 кг•м*2;
масса груза
m = 1000 кг;
радиус барабана лебедки
RБ = 0,15 м;
число зубцов шестерен z1 = 14, z2 = 86;
р = 0,97;
КПД барабана лебедки Б = 0,96.
КПД редуктора
14. Электропривод
4. Решение задачТребуется:
Определить приведенные к валу электродвигателя момент инерции J и
момент сопротивления Мс для приведенной схемы.
Операции приведения выполнить для случая подъема груза.
Решение.
1. Определяем передаточное число редуктора
i = z2/z1 = 86/14 = 6,14.
2. Определяем радиус приведения кинематической схемы
= RБ/ i = 0,15/6,14 = 0,025 м.
3. Определяем приведенный момент инерции
J = Jд + J1 + J2/ i*2 + m *2 = 0,1 + 0,02 + 2/6,14*2 + 1000•0,025*2 = 0,8 кг•м*2.
4. Определяем момент сопротивления, приведенный к валу двигателя
Мс = m•g• /( р• Б) = 1000•9,81•0,025/(0,97•0,96) = 263 Н•м.
15. Электропривод
5. Домашнее заданиеЛ1, с. 14 – 21
Задача
Для рассмотренной задачи определить J и Мс в случае спуска груза,
приняв те же значения параметров и КПД кинематической схемы.
English Русский Правила
4. Типовые статические нагрузки электропривода. Активные и реактивные силы и моменты нагрузки
Механическая характеристика исполнительного механизма – зависимость Мс=f(ω).
Активными
,
и
направлен вниз, независимо от направления
вращения вала двигателя. Величина МС не
зависит от скорости Рисунок 2.1 перемещения
груза.
Величина МС не
зависит от скорости Рисунок 2.1 перемещения
груза.
Реактивными силами и моментами называются силы и моменты сопротивления движению, возникающие как реакция на активный движущий момент, развиваемый двигателем. Реактивные силы и моменты зависят от скорости и подразделяются на силы и моменты сухого трения, вязкого трения и силы, и моменты вентиляторного типа.
Силы и моменты сухого трения (рисунок 2.2) неизменны по модулю, но скачком меняют свой знак при изменении знака скорости: . Они характерны для станочных приводов подачи, вентилей, дросселей и т.д. На рисунке 2.3 изображен нагрузочный момент вязкого трения, характеризующийся линейной (или близкой к ней) зависимостью величины от скорости —
Зависимость
нагрузочного момента от угловой скорости
вентилятора, центробежного насоса,
центрифуги имеет вид, показанный на
рисунке 2.4, называется вентиляторным и
описывается формулой ,
где n = 1,5…2. 5.
5.
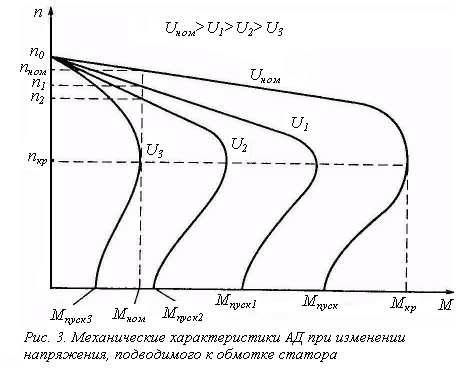
Механическая характеристика электродвигателя – зависимость М=f(ω). Из курса «Электрические машины» знаем, что механические характеристики ЭД (рисунок 5) могут быть абсолютно жесткими (1- синхронный ЭД), жесткими (3 – двигатель постоянного тока независимого возбуждения и 2 – асинхронный двигатель на рабочем участке) и мягкими (4 — двигатель постоянного тока последовательного возбуждения). Абсолютной жесткостью характеристики называется отношение приращения момента к приращению скорости
.
5. Приведение моментов статической нагрузки к валу двигателя
В
системе действуют два момента: момент,
развиваемый двигателем МД,
и момент статической нагрузки МС,
в который входят момент, создаваемый
рабочим органом механизма, и моменты
трения. Эти моменты характеризуются
величиной и направлением действия. Если
МД и
МС действуют
в направлении движения, их называют движущими,
если их знаки противоположны знаку
скорости, моменты называют тормозящими. В соответствии с принципом Деламбера,
совместное действие МД и
МС определит
величину и знак динамического момента ,
определяющего ускорение системы. Таким
образом, уравнение движения системы в
общем случае имеет вид
В соответствии с принципом Деламбера,
совместное действие МД и
МС определит
величину и знак динамического момента ,
определяющего ускорение системы. Таким
образом, уравнение движения системы в
общем случае имеет вид
.
Проведем простейший анализ уравнения (1) для двигательного режима работы ЭП, когда
.
При МД > МС dω/dt > 0 и имеет место режим ускорения привода, при МД < МС dω/dt < 0 и имеет место режим замедления привода, а при МД = МС динамический момент и ускорение равны нулю. Первые два режима называют переходными, а последний – установившимся (стационарным).
6. Приведение моментов инерции к валу двигателя
При приведении моментов статической нагрузки исходим из равенства мощности в реальной и приведенной схемах:
, Откуда .
При возвратно – поступательном движении
, и
Суммарный приведенный к валу двигателя момент сопротивления
 При вращательном движении
При вращательном движенииПри возвратно – поступательном движении
; , где;.
Суммарный приведенный к валу двигателя момент инерции
7. Естественные электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения
8. Построение естественных электромеханических и механических характеристик двигателей постоянного тока независимого возбуждения
9. Искусственные электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения при изменении сопротивления цепи якоря
10. Искусственные электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения при изменении напряжения якоря.
11.
Искусственные электромеханические и
механические характеристики двигателей
постоянного тока независимого возбуждения
при изменении магнитного потока.
12. Режимы торможения двигателей постоянного тока независимого возбуждения. Электродинамическое торможение.
13. Режимы торможения двигателей постоянного тока независимого возбуждения. Торможение противовключением.
14. Режимы торможения двигателей постоянного тока независимого возбуждения. Рекуперативное торможение.
Электромеханические и электромагнитные процессы в ДПТ НВ (рисунок 1) описываются уравнениями электрического равновесия (Кирхгофа) цепей якоря и обмотки возбуждения, а также уравнением электромагнитного момента:
Из совместного решения системы уравнений получаем уравнение электромеханической характеристики ω = f(I)
и уравнение механической характеристики ω = f(M)
В установившемся режиме работы привода
, и уравнения приобретают вид
Характеристики,
построенные при номинальных значениях
напряжения и потока и Rдоб =0,
называются естественными,
при UЯ ≠UН,
Ф≠ФН или
Rдоб ≠0
– искусственными электромеханическими
или механическими характеристиками.
Используя введенные значения жесткости характеристик
;
можно записать следующие выражения для электромеханических и механических характеристик:
; ;
Режимы работы привода, приведенные на рисунке 2, поясняются ниже.
В двигательном режиме
работы (рисунок 2.9) ЭД потребляет энергию
из электрической сети и передает на вал
механическую энергию. В режиме противовключения (рисунок
2.10) ЭД потребляет энергию, накопленную
механизмом, и рассеивает в элементах
двигателя и добавочных сопротивлениях.
При Rдоб ≠0 получаем искусственные реостатные электромеханичеcкие характеристики. Увеличение в (2.4, 2.5) RЯΣ приводит к уменьшению величины тока короткого замыкания (IК=UН/RЯΣ) при неизменной скорости холостого хода ω0=UН/kФН (рисунок 3.1). При неизменном магнитном потоке Ф=ФН, механические характеристики будут аналогичны эл.механическим.
Магнитный
поток машины можно изменять только в
сторону уменьшения. При этом скорость
холостого хода ω0=UН/kФН возрастает
при неизменном значении тока короткого
замыкания I К=UН/RЯΣ (рисунок
3.2 – электромеханическая характеристика
при Ф — var). Момент короткого замыкания
МК=kФIК при
Ф — var снижается. Механическая характеристика
изображена на рисунке 3.3.
Механическая характеристика
изображена на рисунке 3.3.
Напряжение, подаваемое на якорь машины, можно изменять только в сторону уменьшения от номинального значения. При этом пропорционально напряжению снижаются и скорость холостого хода ω0=UН/kФН , и значение тока короткого замыкания IК=UН/RЯΣ (рисунок 3.4 – электромеханическая характеристика при U — var). Момент машины М=kФI при Ф-const пропорционален току якоря и механическая характеристика имеет аналогичный вид.
В соответствии с рассмотренными режимами работы электропривода, следует выделить следующие
a) рекуперативное торможение (с отдачей энергии в сеть)
Направление
действия электромагнитного момента
электрической машины определяется
направлением тока якоря ДПТ и магнитного
потока (1. 1 в лекции №1). В соответствии
с 1.1, ток якоря
1 в лекции №1). В соответствии
с 1.1, ток якоря
,
и его знак зависит от соотношения ЭДС якоря и питающего напряжения. При
момент положителен и машина работает в двигательном режиме. При — холостой ход, и примашина работает в генераторном режиме (режим рекуперации мощности в сеть). Для обеспечения рекуперативного торможения необходимо, чтобы частота вращения вала ω была больше скорости холостого хода при данной схеме включения и параметрах питания двигателя. На рисунке 3.5 представлены механические характеристики ДПТ НВ грузоподъемного механизма, работающего в режиме рекуперативного торможения;
б) Электродинамическое торможение
На рисунке 3.6 представлена схема электродинамического торможения ДПТ НВ. Якорь двигателя отключен от сети и замкнут на дополнительное тормозное сопротивление RТ, обмотка возбуждения подключена к источнику питания. При этом ток якоря меняет знак на обратный
.
Взаимодействуя с потоком возбуждения, ток якоря образует момент, направленный против скорости вращения якоря двигателя. Уравнения электромеханической и механической характеристик принимают вид
; .
Механическая характеристика в режиме динамического торможения (рисунок 3.7) проходит через начало координат. По мере снижения скорости тормозной момент уменьшается, и в случаях необходимости повысить его величину при сниженных скоростях прибегают к двух- или даже трехступенчатому торможению, уменьшая ступенями сопротивление якорной цепи двигателя по мере снижения его скорости;
C) торможение противовключением
В
режиме противовключения изменяет знак
скорость двигателя при сохранении знака
момента или знак момента двигателя при
сохранении знака скорости. Первый случай
имеет место при воздействии активного
момента статической нагрузки, превышающего
момент короткого замыкания на данной
характеристике (рисунки 3. 7, 3.8).
7, 3.8).
В результате изменения знака скорости ЭДС двигателя будет совпадать с приложенным напряжением, и ток в якоре определится, как
.
Этот режим используется в подъемных установках для спуска груза с малыми скоростями («силовой спуск»).
Режим противовключения чаще используется для остановки или изменения направления вращения двигателя путем перемены полярности напряжения, подводимого к якорю (рисунки 3.9, 3.10). При этом ток якоря изменит направление на обратное, изменится соответственно и знак момента двигателя, который будет направлен, до остановки двигателя, в сторону, противоположную скорости:
.
[решено] Кривая нагрузки для типа нагрузки вентилятора (ω — скорость)
Этот вопрос ранее задавался в
MPSC Assistant Engineer EE Mains 2019 — Paper 1
View all MPSC AE Papers >
- T ∝ ω
- T ∝ ω 2
- T ∝ ω 3
- Ничего из вышеперечисленного
Вариант 2: T ∝ ω 2
Бесплатно
MPSC AE CE Mains 2019 Official (документ 1)
3,3 тыс. пользователей
пользователей
100 вопросов
200 марок
120 минут
Большинство промышленных нагрузок можно разделить на следующие 4 основные категории:
- Нагрузка с постоянным крутящим моментом
- Крутящий момент, пропорциональный скорости (нагрузка генераторного типа)
- Крутящий момент, пропорциональный квадрату скорости (нагрузка типа вентилятора)
- Крутящий момент обратно пропорционален скорости (нагрузка постоянной мощности)
Нагрузка с постоянным крутящим моментом:
- Генераторы постоянного тока с независимым возбуждением, подключенные к нагрузке с постоянным сопротивлением, вихретоковые тормоза имеют характеристики скорость-момент, определяемые T = кВт
Крутящий момент, пропорциональный квадрату скорости (нагрузка вентиляторного типа):
- Кривая крутящего момента нагрузки представляет собой график, показывающий требуемый крутящий момент по оси Y в зависимости от скорости по оси X .

- Требуемый крутящий момент нагрузки от нулевой скорости до полной скорости.
- Зависит от приложения/нагрузки и зависит от типа нагрузки.
- Нагрузка, такая как центробежные насосы и вентиляторы, имеет квадратичную кривую крутящего момента скорости, где крутящий момент изменяется в квадрате, умноженном на скорость.
Крутящий момент обратно пропорционален скорости:
- Мощность нагрузки остается постоянной при этом типе нагрузки
- Пенообразователь, сверлильный станок, фрезерный станок, намотчик сталелитейного завода и электрическая тяговая нагрузка имеют этот тип характеристики крутящий момент-скорость.
Нагрузка волочения металла:
- Волочение металла — это производственный процесс, при котором объемная деформация металлических изделий используется для уменьшения площади их поперечного сечения.
- Объемная деформация означает массивные изменения формы, и была произведена значительная деформация.

Поделиться в WhatsApp
Последние обновления MPSC AE
Последнее обновление: 13 апреля 2023 г.
MPSC AE Result Out for Electrical (Advt. 089/2022)! Ранее расписание интервью для Advt. 064/2022. Собеседование было запланировано на период с 17 по 21 апреля и с 25 по 28 апреля 2023 года. Комиссия по государственной службе Махараштры (MPSC) выпустила уведомление о наборе MPSC AE. Всего была открыта 151 вакансия по гражданским, механическим и электрическим дисциплинам. Процесс подачи заявок начался 3 октября 2022 года, и кандидаты могли подавать заявки до 23 октября 2022 года. Процесс отбора проходит в 3 этапа: предварительный, основной и собеседование. Предварительный экзамен состоялся 17 декабря 2022 года. Кандидаты, прошедшие отбор на предварительных экзаменах, имеют право участвовать в основных. Окончательный список избранных будет опубликован после интервью.
Размер двигателя является плохим индикатором использования мощности вентилятора
Слишком часто при сравнении туннельных вентиляторов люди в первую очередь обращают внимание на размер двигателя. Считается, что чем меньше размер двигателя, тем меньше вентилятор. будет стоить эксплуатация.
Хотя в целом это правда, дело в том, что не все двигатели данного размера будут потреблять одинаковое количество энергии. Например, на рисунке 1 показан диапазон мощности, потребляемой 158 различными 48-дюймовыми вентиляторами, протестированными лабораторией BESS. Хотя все вентиляторы были оснащены двигателем мощностью в одну лошадиную силу (HP), мощность, потребляемая вентиляторами, варьировалась от 700 Вт до чуть менее 1300 Вт!
Рисунок 1. Мощность, потребляемая различными 48-дюймовыми вентиляторами с двигателями мощностью 1 л.с. помечен как «1 HP». По определению, один HP равен 746 Вт мощности.
Двигатель мощностью 1 л.с. предназначен для подачи на вал двигателя мощности не менее 746 Вт.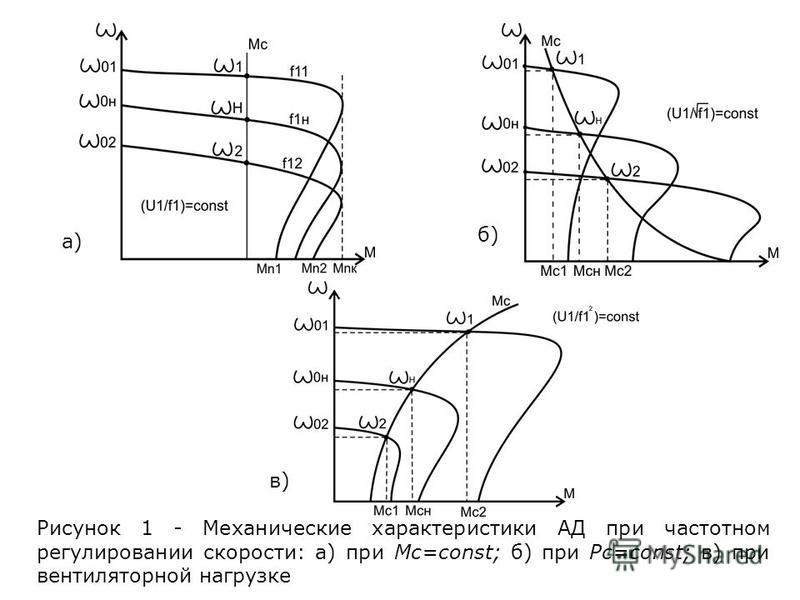 Если двигатель не подключен к нагрузке, он, очевидно, не будет выполнять никакой работы, но все равно будет потреблять небольшое количество энергии. Если он подключен к лопасти вентилятора, требующей мощности 746 Вт, он будет обеспечивать эту мощность. Если ему требуется меньше или больше, он попытается доставить это количество. Таким образом, мощность, потребляемая двигателем мощностью 1 л.с., больше зависит от того, как он загружен, чем от того, на что он способен.
Если двигатель не подключен к нагрузке, он, очевидно, не будет выполнять никакой работы, но все равно будет потреблять небольшое количество энергии. Если он подключен к лопасти вентилятора, требующей мощности 746 Вт, он будет обеспечивать эту мощность. Если ему требуется меньше или больше, он попытается доставить это количество. Таким образом, мощность, потребляемая двигателем мощностью 1 л.с., больше зависит от того, как он загружен, чем от того, на что он способен.
Если для вращения винта определенного 48-дюймового вентилятора со скоростью, скажем, 400 об/мин требуется 900 ватт энергии, двигатель «попытается» выдать 900 ватт мощности, независимо от размера двигателя.
Если двигатель вентилятора способен обеспечить только 746 Вт мощности (1 л.с.) для привода винта, он будет перегреваться из-за перегрузки. Но если двигатель способен обеспечить мощность 1492 Вт (2 л.с.), он может легко обеспечить мощность 900 Вт, не беспокоясь о перегреве.
Количество энергии, которое он будет использовать, определяется не столько мощностью, которую двигатель способен обеспечить, сколько работой/мощностью, необходимой для вращения винта вентилятора с заданной скоростью. На самом деле он ничем не отличается от двигателя автомобиля. Сколько бензина использует двигатель автомобиля, больше зависит от того, насколько двигатель загружен (т.е. как быстро движется автомобиль), чем от его размера/рабочего объема.
На самом деле он ничем не отличается от двигателя автомобиля. Сколько бензина использует двигатель автомобиля, больше зависит от того, насколько двигатель загружен (т.е. как быстро движется автомобиль), чем от его размера/рабочего объема.
Рис. 2. Энергопотребление вентилятора в зависимости от скорости вентилятора
На Рис. 2 показано энергопотребление конкретного 52-дюймового вентилятора с двигателем мощностью 2 л.с. в зависимости от скорости вращения винта. Мощность, необходимая для вращения лопастей вентилятора, может изменяться почти на 100 % в зависимости от скорости вращения лопастей вентилятора. Увеличение реквизита с 540 до 593 об/мин, увеличение всего на девять процентов, увеличивает мощность, используемую двигателем вентилятора, с 1046 до 1365 Вт, то есть на 31 процент. Увеличьте его до 650 об/мин (увеличение на 20%), и энергопотребление увеличится почти вдвое! Опять же … не размер двигателя определяет, сколько энергии потребляет вентилятор, а то, сколько работы требуется от него.
Другим фактором, определяющим энергопотребление двигателя вентилятора, является КПД двигателя. Электрические двигатели не на 100 процентов эффективны, то есть вам нужно подавать более 746 ватт электроэнергии на двигатель вентилятора, чтобы получить 746 ватт полезной мощности от двигателя для привода винта вентилятора.
В двигателе возникают потери мощности, связанные с электрическим сопротивлением в обмотках двигателя, трением в подшипниках и т. д. Эти потери проявляются в виде теплоты.
КПД двигателя вентилятора обычно составляет от 74 до 86 процентов при полной нагрузке, что означает, что примерно 20 процентов мощности, потребляемой двигателем вентилятора, используется для производства тепла, а не для вращения лопастей вентилятора. Просто принимая во внимание КПД двигателя, чтобы получить 746 Вт полезной мощности от типичного двигателя вентилятора мощностью 1 л.с., вы должны вложить в двигатель вентилятора от 867 до 1008 Вт мощности.
Рис. 3. Паспортная табличка двигателя вентилятора мощностью 1 л. с.
с.
Третий фактор — эксплуатационный фактор двигателя. Сервис-фактор двигателя — это, по сути, мера того, насколько двигатель может быть перегружен, не опасаясь повреждения. Например, двигатель с эксплуатационным коэффициентом 1,2 означает, что двигатель можно перегрузить на 20 %, не опасаясь его повреждения. Таким образом, двигатель мощностью 1 л.с. с эксплуатационным коэффициентом 1,2 способен обеспечить мощность 895 Вт для привода вентилятора, а не 746 Вт. Для всех практических целей это двигатель мощностью 1,2 л.с. Вентиляторы на рис. 1, которые потребляют более 1100 Вт мощности, обычно имеют коэффициент мощности более 1,0.
На рис. 3 показана заводская табличка двигателя вентилятора. Хотя это двигатель мощностью 1 л.с. с эксплуатационным коэффициентом 1,3, его можно нагружать, если это был двигатель мощностью 1,3 л.с.
Важно отметить, что при полной нагрузке он может производить больше энергии для привода вентилятора, чем двигатель мощностью 1 л. мотор. Важно иметь в виду, что если вы заменили двигатель вентилятора с коэффициентом эксплуатации 1,3 на коэффициент эксплуатации 1,0, велика вероятность того, что двигатель перегреется и отключится.
Рис. 4. Описание испытанного вентилятора
Еще один фактор, влияющий на энергопотребление двигателя вентилятора, заключается в том, что вентиляторы рассчитаны на подачу указанной мощности в наихудших условиях, т. е. при высоких температурах, низкой скорости воздуха над двигателем и т. д. Когда при работе в более нормальных условиях энергопотребление обычно ниже. Насколько ниже, будет зависеть от того, как именно был спроектирован двигатель вентилятора.
Как видите, существует множество факторов, в конечном итоге определяющих количество энергии, которое будет потреблять вентилятор с двигателем мощностью 1 л.с.
Хотя паспортная табличка двигателя может дать некоторое представление об энергопотреблении, единственный способ фактически определить количество энергии, которое будет потреблять вентилятор, — это испытательные лаборатории вентиляторов, такие как лаборатории BESS в Университете Иллинойса (www.bess.uiuc). .edu).
Данные испытаний вентилятора будут включать в себя широкий спектр информации о вентиляторе (рис. 4), а также объем воздуха, который вентилятор перемещает, а также рейтинг энергоэффективности (куб. футов в минуту/ватт) при различном статическом давлении (рис. 5). Чтобы определить энергопотребление конкретного вентилятора, просто разделите количество воздуха, перемещаемого вентилятором (например, куб.
4), а также объем воздуха, который вентилятор перемещает, а также рейтинг энергоэффективности (куб. футов в минуту/ватт) при различном статическом давлении (рис. 5). Чтобы определить энергопотребление конкретного вентилятора, просто разделите количество воздуха, перемещаемого вентилятором (например, куб.
Рис. 5. Результаты тестирования производительности вентилятора.
Например, по результатам испытаний производительности вентилятора, показанным на рис. 4, 54-дюймовый вентилятор с двигателем мощностью 1 л.с. будет перемещать 24 500 куб. 24 500 куб. футов в минуту на 21,4 куб.
Но… дело в том, что с точки зрения энергоэффективности количество энергии, потребляемой вентилятором, на самом деле не является хорошей мерой его общей энергоэффективности. Дело не в том, сколько энергии потребляет вентилятор, а в том, сколько энергии требуется для перемещения кубического фута воздуха.
Например, это не обязательно является проблемой, если вентилятор A потребляет на 20 % больше энергии, чем вентилятор B, если он перемещает как минимум на 20 % больше воздуха.