
Преобразователь частоты INVT GD200A-7R5G-2(F) | INVT
(495) 663-663-5многоканальный для Москвы и МО
Заказать звонок(800) 600-49-09бесплатный для всех регионов РФ
График работы: Пн — Пт с 9:00 до 18:00
ГлавнаяКаталогЧастотные преобразователи7,5 кВтПреобразователь частоты INVT GD200A-7R5G-2(F)
По запросу
| категория: | 7,5 кВт, 220 В |
| серия: | Частотные преобразователи 7,5 кВт |
| ном. мощность (G)*: | 7,5 кВт |
| выходной ток (G)*: | 30 А |
| входное напряжение: | 3АС 220 В |
| выходное напряжение: | 3АС 220 В |
| степень защиты: | IP20 |
* G/P — (G) — постоянный крутящий момент, (Р) — насосно-вентиляторная нагрузка
Гарантия на товарПреобразователи частоты Goodrive200A (GD 200A) – бюджетная модификация GD200. Эффективный, универсальный инвертор с векторным и скалярным режимом управления, встроенным ЭМС фильтром, созданный под основные потребности потребителей, эксплуатирующих преобразователи частоты.
Подробное описание
Преобразователь частоты GD200А обеспечивает «бездатчиковое» векторное управление нагрузкой в разомкнутой системе и скалярное V/f управление. По сравнению со своим аналогом GD200, GD200A имеет более эффективную систему охлаждения (изменена конструкция воздуховодов), значительно улучшенное аппаратное и программное обеспечение. Уменьшено время срабатывания защиты от короткого замыкания нагрузки. Поддерживает общую шину постоянного тока, имеет дополнительно функции управления насосами. Отличается высокими эксплуатационными характеристиками и стабильностью работы, многофункциональностью и простотой обслуживания.
Области применения:
- Воздушные компрессоры и масляные насосы
- Экструдеры, термопласт автоматы, дробильное оборудование и шредеры
- Транспортеры и конвейерные линии
- Системы тепло и водоснабжения, вентиляторы и насосы
Технические характеристики
Питание | Входное напряжение | 3-фазное ~400 В (+15%) |
Входная частота | 47…63 Гц | |
Выход | Выходное напряжение | 3-фазное ~0…U вход. |
Выходная частота | 0…400 Гц | |
Функции преобразователя частоты | Режим управления нагрузкой | U/F |
SVC | ||
Тип нагрузки | Асинхронный двигатель | |
Перегрузочная способность | Тип G (постоянный момент на валу): 160% — 1 мин. 180% — 10 сек. 200% — 1 сек. Тип Р (переменный момент на валу): 120% — 1 мин. | |
Задание частоты | Цифровое, аналоговое, с панели управления, фиксированные скорости, задание ПИД, по интерфейсу RS485 | |
Автоматическая регулировка напряжения (AVR) | Поддержание выходного напряжения на заданном уровне независимо от колебаний питающей сети | |
Отслеживание скорости | Перезапуск двигателя после потери напряжения | |
Защиты | Более 30 защит. | |
Внешние подключения
| Дискретные входы, в том числе импульсные | 8 цифровых входа управления 1 импульсный высокочастотный вход HDI макс. 50 кГц |
Дискретные выходы, в том числе релейные | 1 цифровой транзисторный выход Y1 (50 мА / =30 В) 1 импульсный высокочастотный выход HDO макс. 50 кГц 2 релейных выхода (NO и NC, 3A~250 В / 1 А =30 В) | |
Аналоговые входы | 2 аналоговых входа AI2 многофункциональный 0…10 В / 4…20 мА AI3 по напряжению -10 В…+10 В | |
AI1 встроенный потенциометр Панель управления ПЧ | ||
Аналоговые выходы | 2 аналоговых выхода АО1 многофункциональный 0…10 В / 4…20 мА АО2 многофункциональный 0…10 В / 4…20 мА | |
Интерфейс RS-485 | 2-х проводной, изолированный, протокол Modbus RTU / ASCII | |
Дополнительная информация | Встроенные источники питания | 24 В / 150 мА (дискретные входы / выходы) |
10 В / 50 мА (аналоговые входы / выходы) | ||
Тормозной ключ | Встроенный для моделей мощностью до 30 кВт включительно | |
ЭМС фильтр | Встроенный — класс С3 | |
Панель управления | Несъемная для моделей мощностью < 15 кВт Съемная для моделей мощностью > 18,5 кВт | |
Условия эксплуатации | -10…+500С, (рекомендуемая до +400С) Влажность < 90%, без образования конденсата | |
Условия хранения | -40…+600С | |
| Степень защиты | IP20 |
 Превышение по току, перенапряжение, низкое напряжение, перегрузка и т.д.
Превышение по току, перенапряжение, низкое напряжение, перегрузка и т.д.Примеры применения
1. Поддержание заданного давления GD200A
Поддержание заданного давления GD200A
2. 2-х скоростной режим GD200А с реверсом
Схемы подключения
Документация и ПО
ПО для ПК для настройки и контроля работы частотных преобразователей INVT
3D-модели GD200A
Руководство по эксплуатации GD200AКаталог GD20/GD200AЧертеж GD200AКаталог продукцииINVTДекларация соответствия на частотные преобразователи INVTСертификат дистрибьютора INVT
Похожие предложения
В наличии
Преобразователь частоты INVT GD300L-7R5G-2(F)В наличии
Преобразователь частоты INVT GD20-7R5G-S2(F)В наличии
Преобразователь частоты INVT GD20-7R5G-2В наличии
Преобразователь частоты INVT GD20-7R5G-4В наличии
Преобразователь частоты INVT GD200A-7R5G/011P-S24В наличии
Преобразователь частоты INVT GD350-7R5G-2В наличии
Преобразователь частоты INVT GD300L-7R5G-4
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
Гарантийные обязательства:
1. Стандартный срок гарантии составляет 36 месяцев со дня выдачи Оборудования Покупателю.
Стандартный срок гарантии составляет 36 месяцев со дня выдачи Оборудования Покупателю.
2. В случае если в течение гарантийного срока вышеупомянутое Оборудование выйдет из строя не по вине Покупателя, поставщик обязуется произвести ремонт или замену дефектного Оборудования без дополнительной оплаты.
3. Гарантийный ремонт и обслуживание производятся в течение 5-ти рабочих дней после предъявления настоящего гарантийного талона, при наличии необходимых запчастей в сервисном центре Продавца Оборудования. Если Продавец не может произвести своевременный ремонт из-за отсутствия необходимых запчастей, то в течение 2-х рабочих дней после сдачи Оборудования Продавец обязан уведомить об этом Покупателя путем отправки ему электронного письма с указанием причины невозможности своевременного ремонта(замены) и указать сроки ремонта. Гарантийный срок продлевается на время проведения ремонта.
С более подробной информацией о гарантийных обязательствах Вы можете ознакомиться, пройдя по ссылке
Как число пар полюсов асинхронного двигателя
Содержание
- 1 Общие ведомости
- 2 Полюса
- 3 Регулировка скорости работы мотора
- 3.
 1 Группирование соединений
1 Группирование соединений - 3.2 Условное сравнение схем
- 3.
- 4 Определение точного количества
- 4.1 3000 оборотов
- 4.2 1,5 тысячи вращений
- 4.3 1000 вращений
- 4.4 750 об/мин
- 4.5 500 оборотов
- 5 Вывод
Определение числа пар полюсов в асинхронном электродвигателе активно реализуется, независимо от среды использования силовых агрегатов. Это помогает определять точное количество операций, для которых используется мотор и контролировать его ресурс. Обо всех особенностях мы напишем далее.
Асинхронный двигатель с экранированными полюсами
Асинхронный силовой агрегат представляет собой устройство, основное назначение которого – преобразовывать электрическую энергию в механическую, которая и приводит в движение рабочие компоненты оборудования. При этом, частота оборотов статорного магнитного поля по умолчанию больше аналогичного показателя ротора. Интенсивность вращения вала такого силового агрегата напрямую определяется количеством полюсов медной намотки. Данный показатель является одним из важнейших, определяющих функционирование мотора. Далее в статье мы расскажем об определении точного числа точек у моторов с асинхронным вращением ротора и статора.
Данный показатель является одним из важнейших, определяющих функционирование мотора. Далее в статье мы расскажем об определении точного числа точек у моторов с асинхронным вращением ротора и статора.
По сути, количество полюсов – это всегда четное число (из-за этого и проводится подсчет именно пар точек, а не отдельных элементов). В современных асинхронных электродвигателях реализуется два типа обмотки:
- сосредоточенная;
- распределенная.
Концентрированная обмотка подходит для бесщеточных двигателей. Вы можете легко изменить количество антиподов, изменив соединение катушек. Статор с шестью обмотками допускает два ключевых типа подсоединения. Один имеет месть на двух сторонах, второй – на четырех или восьми. Однако менять количество полюсов готового двигателя на четыре или восемь неразумно. Распределенная обмотка, которая часто используется для обеспечения 12 точек статора с девятью пазами, подходит для асинхронных двигателей.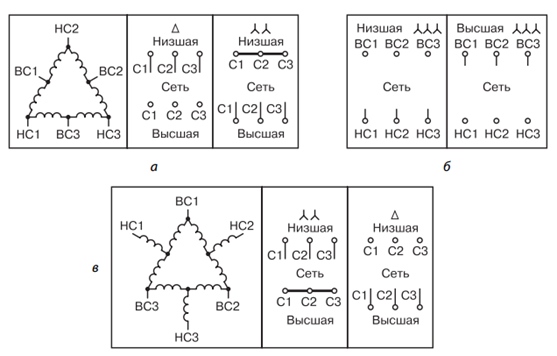 В таком случае количество подбирается еще до начала запуска намотки мотора.
В таком случае количество подбирается еще до начала запуска намотки мотора.
Хотя небольшие двигатели обычно имеют четыре антипода, двухполюсные двигатели также используются для высокоскоростных приложений, требующих 50 или 60 оборотов в секунду. До того, как были введены бесщеточные двигатели, когда-то использовалась методика изменения количества полюсов в асинхронных силовых агрегатах с короткозамкнутыми якорями. Основа метода предполагает изменение типа соединения сложных обмоток, которые нельзя классифицировать как распределенную катушку или концентрированную обмотку. Данный способ был попыткой разрешить работу на двух разных скоростях путем изменения синхронной скорости. Модели моторов витками такой разновидностью называют моторами с расщепленными сторонами.
ПолюсаСтатор электродвигателя имеет сразу несколько пар катушек (р), которые подключаются к сетевому напряжению с определенным показателем частоты (f). В статоре создается намагниченное поле, которое в процессе работы вращается синхронно.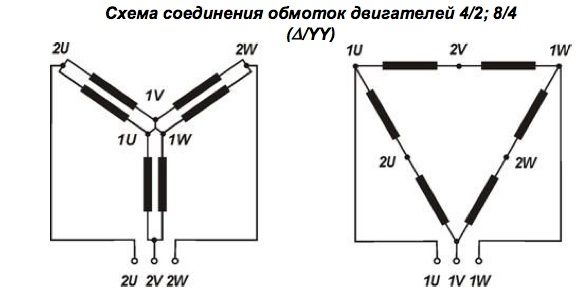 Его рабочая скорость полностью соответствует частоте сети питания и рассчитывается по формуле ns = 60ф/п.
Его рабочая скорость полностью соответствует частоте сети питания и рассчитывается по формуле ns = 60ф/п.
Это поле магнитного действия, вызывает напряжение в обойме ротора (которая представляет собой спрессованные листы, на которые нанесена медная или алюминиевая обмотка). Сгенерированный ток и поток магнитов вызывают вращения якоря. Если же ротор вращается с синхронной скоростью, он не будет вращаться по отношению поля, имеющего место в статоре. В якоре не будет индуцироваться напряжение, и сила, вращающая ротор, уменьшится.
Поэтому вал асинхронных двигателей всегда вращается с асинхронной скоростью относительно оперативности статорного МП. Отличия между этими скоростными данными называются скольжением, которое обычно варьируется в диапазоне от 3 до 5%.
Разница по сравнению с синхронной скоростью напрямую зависит от типа конструкции мотора, его эффективности. Далее мы все эти пункты рассмотрим подробнее.
Асинхронный двигатель с экранированными полюсами схема
Регулировка скорости работы мотораМногие задаются вопросом: — Для чего необходимо обладать информацией о количестве пар полюсов? Первое, что отличается удобством выполнения при помощи этих данных – это регулирование скорости вращений в асинхронном двигателе.
В современных производственных отраслях применяется довольно широкий перечень промышленного оборудования, выполняющего определенные задачи. При этом, нет необходимости обеспечивать плавность регулировки скорости оборотов, достаточно обладать ограниченным перечнем скоростей (только самых важных, чаще всего используемых). К такого типа агрегатам относятся станки в металлообрабатывающей и деревообрабатывающей отраслях, лебедки в добывающих скважинах, центробежных разделителях и др.
Лимитированное число рабочих скоростей оборотов с легкостью обеспечивается многоскоростными моторами короткозамкнутой конструкции (с экранированными полюсами). Здесь могут иметь место сразу две модификации такого оборудования:
- с одной статорной обмоткой, которая поддерживает функцию переключения, для реализации сразу разных пар полюсов;
- с несколькими намотками стационарного компонента, которые располагаются в одних и тех же пазах.
Взаимодействие роторной МДС со статорным элементом, реализуется только в ситуациях полного соблюдения равенства в количествах обмоточных пар этих двух компонентов. Именно поэтому, меняя количество полюсных пар на статоре, нужно обязательно поменять их и в роторе.
Именно поэтому, меняя количество полюсных пар на статоре, нужно обязательно поменять их и в роторе.
Если же имеет место асинхронный агрегат с якорем фазного типа, то для того, чтобы выполнить данное условие, необходимо иметь в наличии вспомогательных колец контактов. Эта особенность способствует увеличению внешних габаритов конструкции и, следственно стоимость.
Якорь короткозамкнутого регулирования с намоткой типа «беличья клетка» имеет в арсенале возможность автоматического генерирования набора пар, который будет равным такому же перечню, но уже со статорной движущей силой. Это качество обусловливает применение якорей коротких замкнутых в асинхронных моторах, работающих со многими скоростями.
Многоскоростные силовые агрегаты сразу с большим количеством катушек на статоре, уступают моделям с единой намоткой. Это выражается в бюджетном и технологическом плане. Устройства с множеством катушек слабо используют статорную обмотку, демонстрируют нерациональное использование пазов.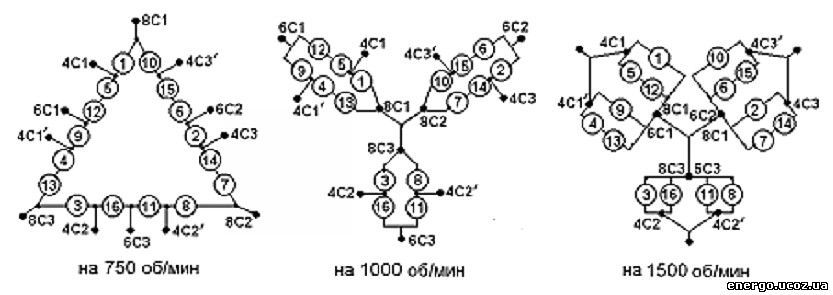 Коэффициент полезного действия и cos ϕ на порядок ниже оптимальных показателей.
Коэффициент полезного действия и cos ϕ на порядок ниже оптимальных показателей.
Эта важная особенность обусловливает то, что все чаще в производственной отрасли применяются электрические двигатели многоскоростного действия на 1 обмотку. Это выгодно, ведь агрегаты поддерживают переключение сразу на разный объем пар.
По сути, посредством переключения направленности движения токов в сфере намоток, параллельно меняют и способ работы с магнитодвижущими силами в середине статорной расточки. В результате получится измененная скорость оборотов МДС и, исходя из этого – непосредственно потока. Чаще всего применяется переключение в пропорции 1 к 2. Из этого следует, что намотки каждой из фаз создаются в форме двух сфер. Смена направления движения токов в какой-то из них дает возможность получать требуемое изменение объема полюсности вдвое.
Для большей информативности, давайте приведем пример таких действий на двигателе, который переключается на 8 точек и 4.
Асинхронный двигатель намотка
Для более простого восприятия, мы взяли изображение намотки всего одной фазы, конструкция которой включает две секции.
Если реализовывать поочередное подсоединение секций – при подключении окончания первой (1К) со стартом другой (2Н), то в результате у нас будет 4 пары точек иле же просто 8 полюсов. Когда провести замену направленности перемещения тока в другой области на обратную, тогда количество полюсов, которые генерируются намоткой, уменьшится вдвое. Какие-либо вариации тока в среде 2Н можно провести посредством разрывания перемычки между секциями 1К и 2К. Число сгенерированных полюсов станет в 2 раза меньше, что информативно продемонстрировано на изображении Б.
Такая смена числа полюсов получается в результате изменения направленности электрического тока в секции №2, посредством применения слаженного запуска с первой. Это указано на изображении В. Здесь, также, как и в ранее описанной ситуации, намотка создает 4 полюса, что полностью отвечает вдвое большим показателям оборотов электрического агрегата.
Когда мы осуществляем сопоставление двух намоток в многоскоростных машинах, стоит преимущественно использовать те схемы, которые обеспечивают в процессе работы требуемый характер зависимостей показателей. К последним относятся момент, допустимый по нагреву от скорости. Схемы кроме всего прочего должны иметь самое малое количество выводов и контактных элементов.
К последним относятся момент, допустимый по нагреву от скорости. Схемы кроме всего прочего должны иметь самое малое количество выводов и контактных элементов.
Опять таки для лучшего удобства, давайте введем критерий, с помощью которого можно будет легко и просто относить обмоточные соединения к определенной группе. Момент, который развивает электромотор с короткозамкнутым якорем рассчитывается по такой формуле:
Формула момента
Условные обозначения:
- p – точное число полюсных пар в статорной намотке;
- N2 – точное количество стержней катушки якоря при реализации типа «беличья клетка»;
- I2 – уровень тока роторного стержня;
- Ψ2 – угол сдвигания тока векторного типа, по отношению к электродвижущей силе ротора;
- Ф – поток магнитного действия одной полюсной пары.
Исходя из условий нагревания ротора (если пренебрегаются условия вентилирования), ток (I2), работая с несколькими парами полюсов, должен всегда находиться на одном уровне. Косинус угла Ψ2 от холостого хода и до номинального момента должен быть максимально приближенным к показателю 1.
Косинус угла Ψ2 от холостого хода и до номинального момента должен быть максимально приближенным к показателю 1.
При тщательном соблюдении всех этих условий момент машины выражается таким равенством:
М = с1*Фр. (1)
Показатель С1 в свою очередь выражается другой понятной формулой:
Формула С1
Справедливости ради укажем формулу расчета электромагнитного момента, который измеряется в джоулях. (2)
Электромагнитный момент в джоулях
Приравняв два уравнения (1) и (2) мы получим такое значение Р, которое будет равняться 314 С1Ф.
Показатель мощности электромагнетизма силового агрегата при любом объеме полюсных обмотки статора, вычисляется при помощи соотношения напряжения элемента по фазам к количеству витков, которые находятся в фазной намотке и соединены последовательным способом.
Применяя данную особенность, можно с высокой долей точности проанализировать все описанные ранее методы переключения количества пар у полюсов. Давайте же посмотрим на изображения, в которых отображаются все ключевые случаи переключений с большого количества полюсных пар на меньшие. В нашей примерной ситуации это 8 полюсов на четыре.
Давайте же посмотрим на изображения, в которых отображаются все ключевые случаи переключений с большого количества полюсных пар на меньшие. В нашей примерной ситуации это 8 полюсов на четыре.
Схемы переключения секций обмотки статора 8 и 4
Как можно видеть на схеме из рисунка А – все две секции являются обтекаемыми токами, движущимися в одном направлении. Все они полностью соответствуют высокому числу пар полюсов. В правой схеме (на рисунке Б) мы имеем встречное направление токов, благодаря чему можно судить о меньшем количестве пар полюсных пар.
Во всех этих случаях количество подключенных последовательным способом витков на обмотках 1 фазы остается на стабильном уровне. К ним дополнительно прилагается фазное напряжение, также на стабильно одинаковом уровне.
Исходя из всего вышеперечисленного, соотношение показателей мощностей в обоих случаях равняется 1, что указывает на работу со стабильным значением мощности (схематически – Р = константа). В этой ситуации для того, чтобы сохранить мощность на постоянном уровне, при изменении скорости на увеличенную вдвое, необходимо изменить показатель момента в обратной направленности его скорости.
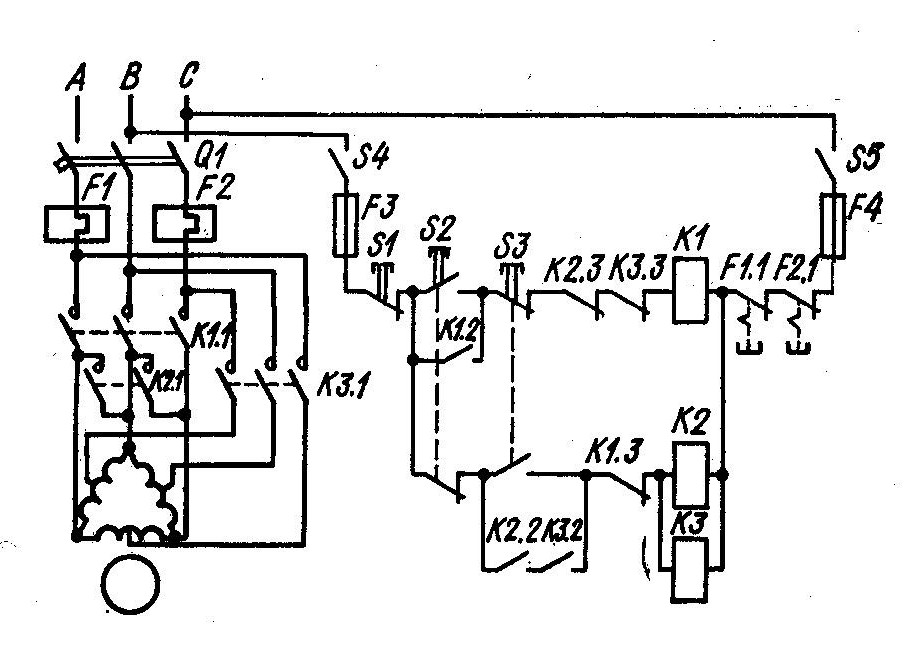
Схематическое изображение переключения полюсов статорных катушек в пропорции 1:2
Принципиальная схема переключения полюсов обмотки статора в соотношении 1 к 2
Как можно видеть на графиках, подключение параллельного типа обмоточных секций позволяет изменять направление подачи тока в каждой из реализованных сфер. Данное значение отвечает за уменьшение числа пар. Вместе с этим, намотка создает сразу 2 звезды симметричного расположения, которые включаются на линейное напряжение. Применяя этот критерий, можно заметить, что когда осуществляется переход на увеличенную скорость оборотов, значение мощности увеличивается вдвое:
Значение мощности увеличивается вдвое
Данные показатели полностью соответствуют утверждению М = константа.
Условное сравнение схемЕсли проводит сравнительный анализ всех вышеописанных схем по отношению к требуемому количеству выходов и контактных элементов на управленческий аппарат, можно заметить несколько особенностей:
- при подключении при помощи принципиальной схемы, необходимо иметь как минимум 9 выводов и 12 контактов;
- схема переключения при подсоединениях секций, дает возможность уменьшать число выходов до шести, а контактных деталей до восьми.

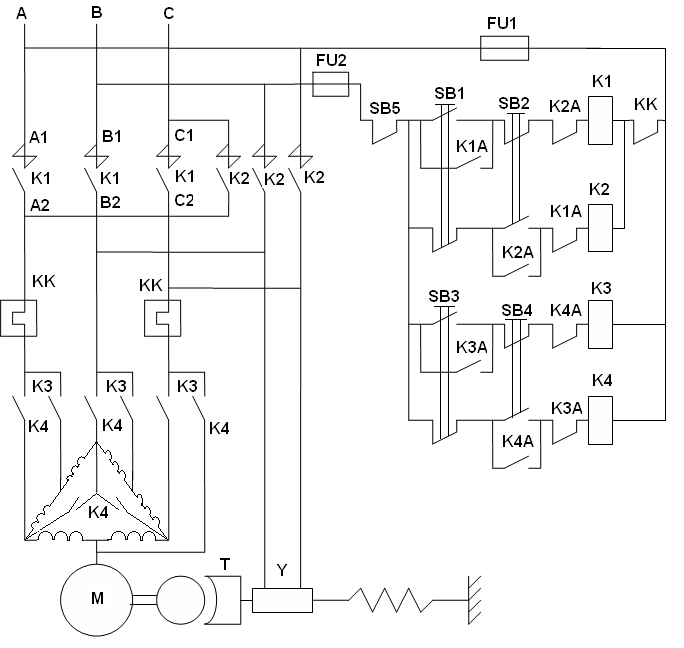
Принципиальная схема переключения полюсов обмотки
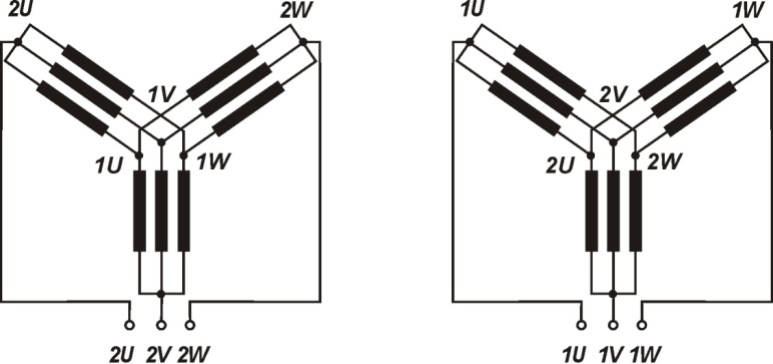
Представленные схемы указывают, что на 2-х скоростях соединения намоток были использованы «звезды» параллельного или последовательного типа. Если возникает необходимость внести изменения в напряжение, которое поступает на однофазную намотку, следует использовать сопряжение катушек с применением схемы обыкновенного или сдвоенного треугольника. В отдельных ситуациях можно даже комбинировать способы звезда – треугольник. При выборе последнего варианта все 3 секции намоток создают треугольник, а остальные 3 — соединяются с вершинами фигуры, создавая «лучи» типа «звезда».
Такие соединения активно применяются в приводах разнотипного оборудования, например, в прочных режущих станках. Также нередко модели используются в ситуациях, когда есть необходимость осуществить поочередное подключение треугольной схемой на 2 звезды, применяя параллельную компоновку.
Когда машина функционирует на малых вращениях, 2 секции каждой отдельной фазы, подключенные последовательным способом, создают линии треугольника, на углы которого осуществляется бесперебойная подача питания.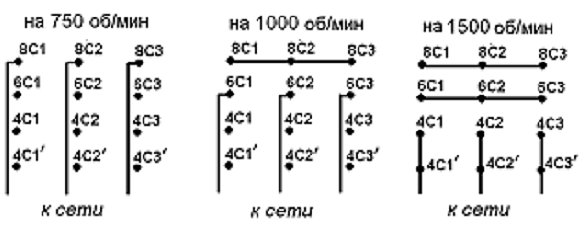 В таком случае все сферы фазовой намотки окружаются током с одинаковыми показателями, что полностью совмещается с большим количеством пар.
В таком случае все сферы фазовой намотки окружаются током с одинаковыми показателями, что полностью совмещается с большим количеством пар.
С целью получения больших скоростных значений верха треугольника, который получился путем обмотки фаз, необходимо замкнуть коротко, а кабели подачи питания перенести в усредненные точки подключения обмоточных секций для каждой отдельной фазы. Исходя из этого, будут иметь место 2 звезды, подключенные параллельно.
Перед тем, как начать своими руками изготавливать обмотки, стоит знать, что процесс создания многоскоростных однообмоточных решений на порядок сложнее, чем двухобмоточных. То, сколько полюсов необходимо реализовывать в моторе, определяет скорость и интенсивность вращения вала силового агрегата и, как следствие – его общую продуктивность.
Определение точного количестваВыше мы уже описали, как проводить регулировку скоростных показателей, используя число пар полюсов двигателя. А как самостоятельно определить точное количество данных пар?
Скорость оборотов мотора асинхронного типа в большинстве ситуаций интерпретируется как угловая частота оборотов его ротора. Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Трехфазные силовые агрегаты поддерживают возможность электропитания и от сетей с одной рабочей фазой, но для реализации такой идеи нужно подсоединить конденсатор. Осуществить это стоит не просто, а одновременно одной или нескольким его намоткам, ориентируясь на уровень напряжения сети питания. Принципиально на конструкцию двигателя это не повлияет.
Если в процессе работы ротор, находясь под нагрузкой за 1 минуту вращается 2760 раз, то его угловая частота будет равняться 289 радиан в секунду. Рассчитать это довольно просто:
2760 * 2пи/60рад.
Получившийся показатель является более техническим, неудобным для восприятия рядовым пользователем. Именно поэтому, рабочие показатели мотора указывают просто и понятно — в оборотах за одну минуту.
Уровень слаженной скорости такого мотора (без учета такого важного значения, как скольжение) равняется 3000 вращений. Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Далее мы рассмотрим о другом методе определения уровня скорости оборотов условного трехфазного агрегата, проведя визуальный осмотр статора. Оценивая внешний вид стационарной детали, расположение медных намоток и точное число пазов, возможно с легкость точно определить количество оборотов мотора. Особенно такая возможность полезна, если в наличии нет такого измерительного устройства, как тахометр.
3000 оборотовВ современной электронике указывается, что каждая определенная модель электродвигателя исходя из типа своей конструкции, имеет 1 – 4 пары полюсов.
Минимальный показатель – 1 пара, и, как следует — 2 полюса. На картинке видно, что статор включает по 2 намотки, которые по отдельности вложены в свой отдельный паз и поочередно подключена на всех фазах.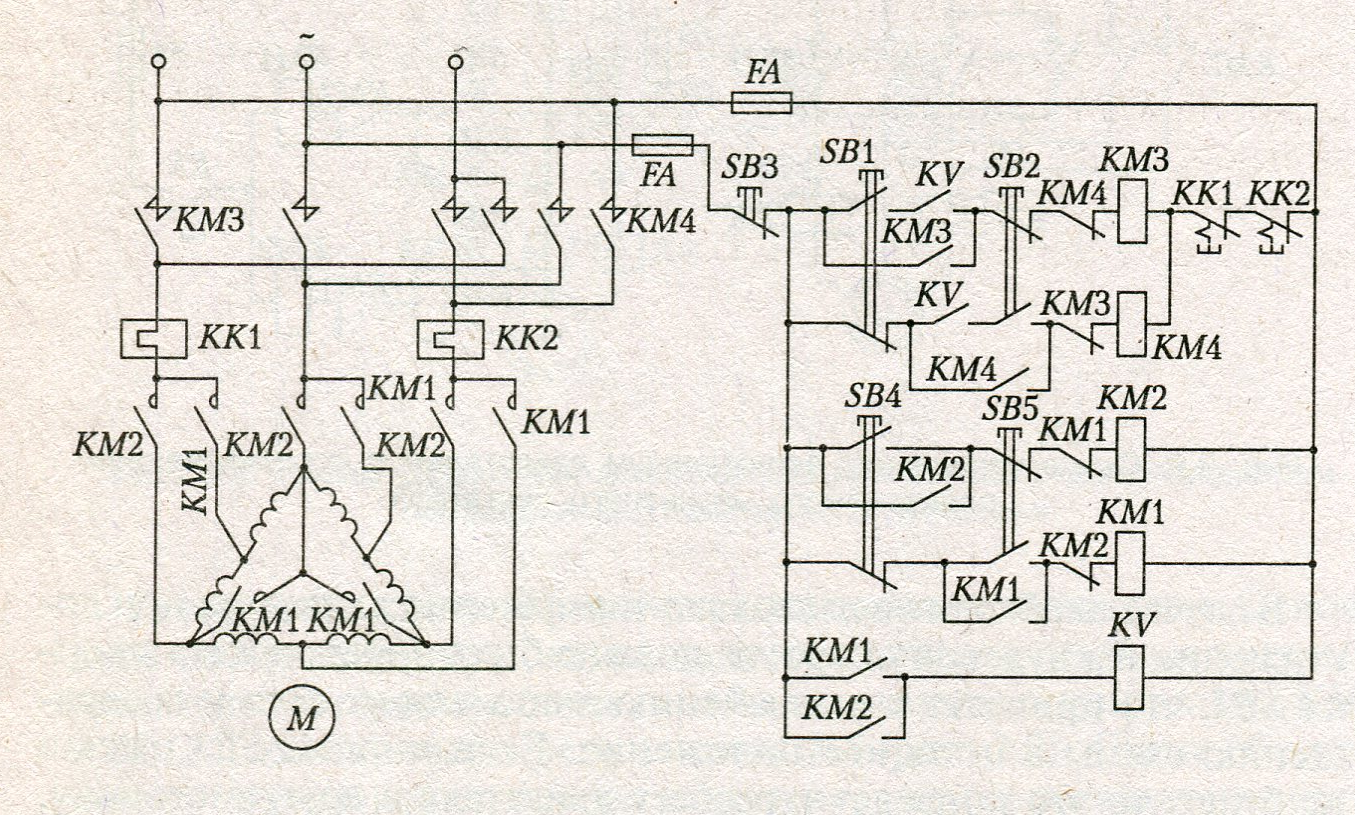 Для каждой пары обмоток все они располагаются друг напротив друга. Они и образовывают по отдельной паре на стационарном элементе двигателя (статоре).
Для каждой пары обмоток все они располагаются друг напротив друга. Они и образовывают по отдельной паре на стационарном элементе двигателя (статоре).
3000 оборотов в минуту схема
Единая фаза для большей наглядности красная, вторая – зеленого цвета, а третья – черная. Все они устроены конструктивно одинаково. Питание данных намоток осуществляется последовательно, исходя из чего, за 1 удар (из 50 максимально возможных) магнитная череда совершит одно вращение по кругу (следовательно на 360˚). 1 оборот совершается за 1/50 долю секунды, а исходя из этого – 50 вращений осуществится за 1 сек. А 50 умножить на 60 и выйдет 3000 об./мин, о чем уже писали ранее.
Нетрудно догадаться, что для точного подсчета количества синхронных вращений силовго агрегата, достаточно подсчитать пары полюсов мотора. Это осуществляется достаточно просто – открыванием крышки и оценкой статора.
В целом, сумму статорных пазов необходимо поделить на разъемы, которые относятся к каждой отдельной секции намотки одной из выбранных фаз. Если в результате расчетов получается 2, тогда двигатель включает 2 полюса, то есть число пар – одна. Исходя из этого, частота синхронных вращений составляет 3 тысячи за 1 минуту, но, учитывая скольжение, этот показатель становится 2910 об/мин. Самая простая модификация имеет 12 пазов, для каждой катушки по шесть разъемов. Таких намоток также 6 – по 2 на каждую отдельную из имеющихся тех фаз.
Если в результате расчетов получается 2, тогда двигатель включает 2 полюса, то есть число пар – одна. Исходя из этого, частота синхронных вращений составляет 3 тысячи за 1 минуту, но, учитывая скольжение, этот показатель становится 2910 об/мин. Самая простая модификация имеет 12 пазов, для каждой катушки по шесть разъемов. Таких намоток также 6 – по 2 на каждую отдельную из имеющихся тех фаз.
Необходимо в процессе реализации также учитывать, что точное число катушек в единой группе для каждой пары не во всех ситуациях должно равняться единице, допустимые значения также 2 и 3. Для простоты восприятия мы указали именно этот, наипростейший вариант.
Рассмотрим же более простые вариации с меньшими мощностями, которые также активно применяются.
1,5 тысячи вращенийКак показывает практика, для достижения показателей скорости в 1500 оборотов за 1 минуту, необходимо увеличить в 2 раза число полюсов у статора. Это реализуется с целью, чтобы обеспечить за 1 удар из пяти десятков, поток магнитов произвел всего половину оборота, то есть на угол 180˚.
Первое, что реализовывают – это обеспечивают по 4 секции намоток. Исходя из этого, если одна медная катушка располагается на 1/25 от всех пазов, то можно уверенно говорить, что имеется дело с мотором на две пары полюсов. Образовываются такие пары при помощи 4-х катушек на каждую фазу.
Есть еще одна распространенная ситуация, при которой 6 разъемов и 24 принимают одну намотку (12 из 48), что также свидетельствует о том, что силовой агрегат имеет 1500 оборотов за 1 минуту. А если учитывать S – скольжение, то реальный уровень будет 1350 об/мин.
1000 вращенийЧтобы имела место этот уровень частоты вращений, нужно, чтобы все фазы по отдельности образовывали готовые 3 пары точек. То есть, за один удар на 50 Герц поток должен развернуться на 120˚ и далее повернуть якорь аналогичным образом.
Представим ситуацию, при которой мы имеем допустимое количество катушек – 18, которые при этом смонтированы на статоре и каждая отдельная эта деталь занимает 1/6 от общего числа всех пазов. Если число разъемов составляет 24, то каждая намотка занимает всего 4 из общего количества. Учитывая скольжение, можно утверждать, что оборотов за 60 сек. будет 935.
Если число разъемов составляет 24, то каждая намотка занимает всего 4 из общего количества. Учитывая скольжение, можно утверждать, что оборотов за 60 сек. будет 935.
Для того, чтобы получить показатель синхронной мощности на этом уровне, нужно одновременное формирование тремя статорными фазами четырех пар передвигающихся полюсов. Это означает, что каждая фаза включает 8 катушек, размещаемых напротив, итого – 8 полюсов.
Если конструкция включает 48 разъемов, тогда придется размещать по намотке на отдельный паз. Это – ключевой параметр мотора с рабочими вращениями 750 за минуту, а при учете скольжения – 730.
500 оборотовЧтобы получить силовой агрегат асинхронного типа с самым малым показателем мощности в 500 об/мин. С этой целью нужно иметь 6 полюсных пар, всего 12 катушек на 1 фазу. Это обеспечивает поворот магнитного потока на угол 60˚. Если конструкция статора включает 36 разъемов, на каждую намотку полагается 4 паза. Именно эти признаки напрямую указывают на асинхронный мотор с 500 вращениями за минуту.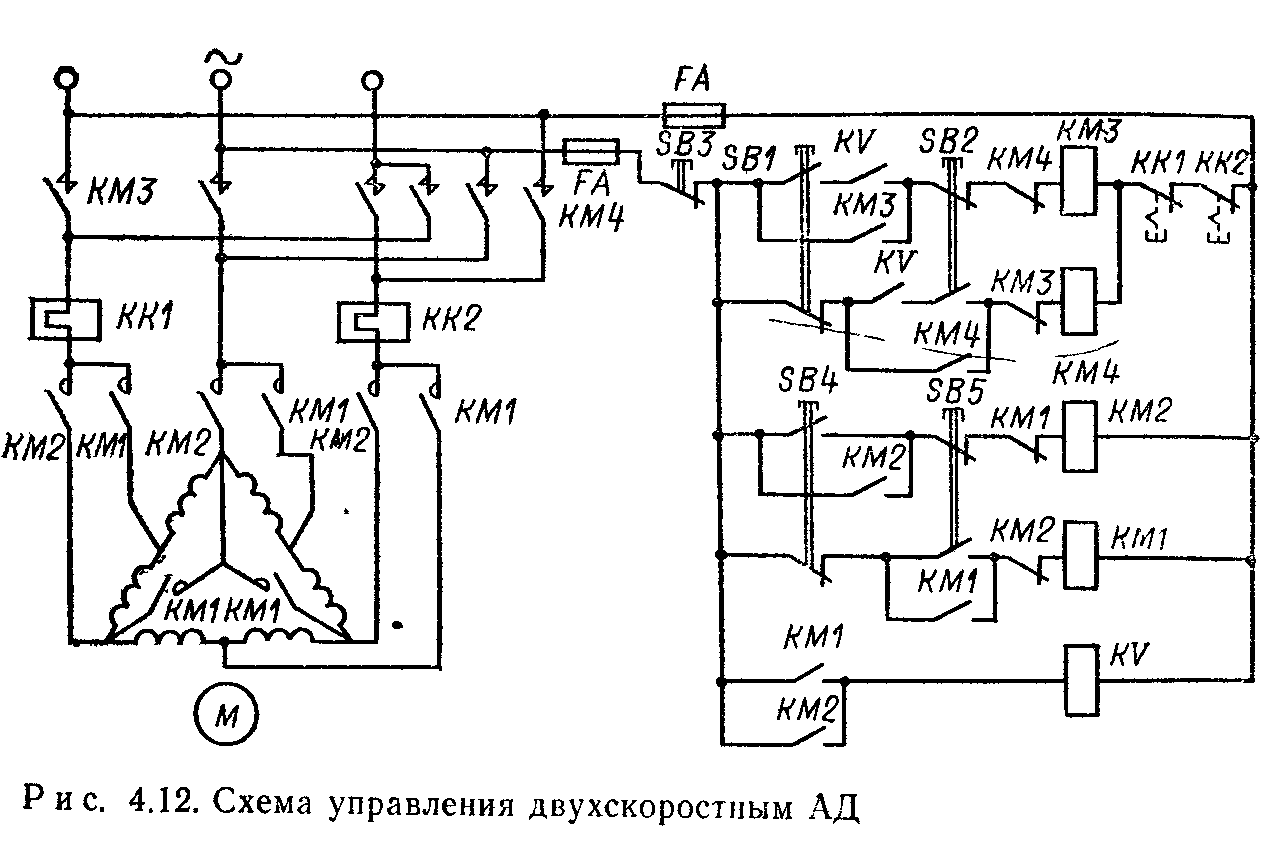 С учетом проскальзывания показатель составляет 480 об./мин. – реальное значение вращения.
С учетом проскальзывания показатель составляет 480 об./мин. – реальное значение вращения.
Порядок синхронных частот для силовых агрегатов асинхронного действия устанавливается и регулируется ГОСТом 10683-73. Согласно ему, количество оборотов мотора классифицируется на вышеописанные значения. Полюса напрямую определяют эту величину, поэтому, выбор машины стоит осуществлять, ориентируясь на точки управляющего прибора.
Китайский производитель подъемных двигателей, двигатель серии Y, поставщик электродвигателей
Дом Производители/Поставщики
Подробнее
Список продуктов
Выбранные поставщики, которые могут вам понравиться
Двигатель постоянного тока 230 В для соковыжималки с большим крутящим моментом
Свяжитесь сейчас
Электрический бесщеточный двигатель постоянного тока 24 В для массажного кресла
Свяжитесь сейчас
Бесщеточный двигатель 24 В для электрического массажного кресла
Свяжитесь сейчас
Бесщеточный двигатель Ec для электроприборов
Свяжитесь сейчас
Бесщеточный двигатель для электродвигателя вентилятора
Свяжитесь сейчас
Бесщеточный двигатель для электродвигателя вентилятора
Свяжитесь сейчас
Высокопроизводительный вертикальный многоступенчатый центробежный электрический насос Оборудование для очистки воды Водяной насос Система очистки воды Мотор
Свяжитесь сейчас
3000 кг автоматических раздвижных ворот с электроприводом двери
Свяжитесь сейчас
Jj-Pkm-C02 Электродвигатель открывания ворот с электроприводом
Свяжитесь сейчас
Автоматический привод для открывания раздвижных ворот Электрический двигатель для раздвижных ворот
Рекомендуемый продукт
Свяжитесь сейчас
ZD Leader 60 мм-104 мм с высоким крутящим моментом и низкими оборотами 6 Вт 15 Вт 25 Вт 30 Вт 40 Вт 60 Вт 90 Вт 120 Вт 150 Вт-300 Вт 12 В 24 В 48 В 90 В 110-220 В щеточный электрический двигатель постоянного тока
Рекомендуемый продукт
Свяжитесь сейчас
ZD 60 мм 80 мм 90 мм 104 мм 24 В 48 В 110 В 220 В 15 Вт-750 Вт Высокопроизводительный электрический бесщеточный двигатель постоянного тока BLDC с регулятором скорости
Рекомендуемый продукт
Свяжитесь сейчас
ZD 60 мм 80 мм 90 мм 104 мм 24 В 48 В 110 В 220 В 15 Вт-750 Вт Высокопроизводительный электрический бесщеточный двигатель постоянного тока BLDC с регулятором скорости
Рекомендуемый продукт
Свяжитесь прямо сейчас
Расчет электрических частот и модели неисправностей двигателей переменного тока.
 Часть 1
Часть 1Диагностика неисправностей асинхронных двигателей, которые, вероятно, являются наиболее распространенными приводами, используемыми в промышленном оборудовании, играет важную роль в снижении катастрофических отказов и производственных потерь тоннажа.
Обнаружение возможных дефектов обычно не является сложной задачей, однако очень важным шагом в выявлении электрических проблем на двигателях переменного тока является проверка того, что вибрация на самом деле имеет электрическую природу, а не механическую проблему, такую как дисбаланс или несоосность.
Эти «электрические» проблемы можно разделить на проблемы, связанные с ротором или статором, и их легко отличить по их индивидуальным характеристикам вибрации.
Типичными проблемами ротора могут быть трещины или поломки стержней ротора или эксцентриситет ротора, в то время как типичными проблемами статора являются, например, эксцентриситет статора, короткое замыкание пластин или ослабление соединений.
Прежде чем рассматривать дефекты двигателей переменного тока, необходимо понять, какие частоты чаще всего генерируются электрическими двигателями и как они рассчитываются.
Давайте посмотрим глубже.
Поскольку магнитное поле индуцируется ротором через воздушный зазор, часть энергии всегда будет теряться, и ротор просто не успевает за скоростью вращающегося магнитного поля. В результате этого асинхронные двигатели всегда будут иметь частоту скольжения, которая представляет собой разницу между скоростью вращающегося магнитного поля и фактической скоростью вращения ротора.
Например, скорость вращения магнитного поля в 2-полюсном двигателе точно равна частоте сети переменного тока (50 Гц) или 3000 циклов в минуту. Если бы ротор вращался со скоростью 2975 об/мин, частота скольжения составит 25 имп/мин. Точно так же с 4-полюсным двигателем магнитное поле вращается ровно с половиной частоты сети переменного тока или 1500 импульсов в минуту. Следовательно, если бы 4-полюсный двигатель действительно работал со скоростью 1480 об/мин, частота скольжения составила бы 20 циклов в минуту.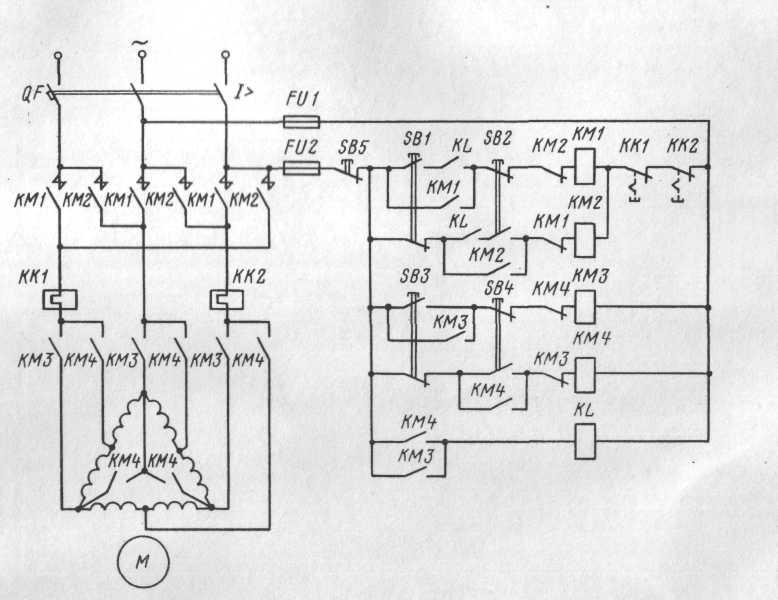
Зная частоту скольжения, можно рассчитать частоту прохода полюса (F P или PPF), которая часто наблюдается при электрических неисправностях.
В завершение, однако, для расчета потребуется еще одна информация F P … количество полюсов.
Где мы можем найти эту информацию? Как его рассчитать?
Для определения количества полюсов должна быть как минимум информация с паспортной таблички двигателя. Затем, если доступно, скорость вращения двигателя считывается и округляется до ближайших 100, например:
2975 об/мин >> 3000 об/мин,
1480 об/мин >> 1500 об/мин.
С такими круглыми числами количество полюсов (P) можно легко рассчитать, используя уравнение для синхронной скорости (Ns).
Если синхронная скорость 3000 об/мин, количество полюсов будет равно 2. Подробно:
N S = 2x F L / P >> P = 2x F L / N S
Количество полюсов = 2x 3000 имп/мин / 3000 имп/мин = 2.
Аналогично, если двигатель 4-полюсный, то синхронная скорость будет 1500 об/мин и т. д. число полюсов, умноженное на частоту скольжения. Используя предыдущий пример, 2-полюсный двигатель, работающий при 2975 об/мин будут иметь частоту скольжения 25 циклов в минуту, а частота прохождения полюса будет составлять 50 циклов в минуту (25 циклов в минуту x 2 полюса = 50 циклов в минуту). Точно так же 4-полюсный двигатель, работающий со скоростью 1480 об/мин, будет иметь частоту скольжения 20 имп/мин и частоту переключения полюсов 80 имп/мин (20 имп/мин x 4 полюса = 80 имп/мин).
Кроме того, наиболее распространенными частотами, указывающими на электрические проблемы в двигателях переменного тока, являются частота сети и удвоенная частота сети (2x F L ). В Европе большинство линейных частот составляют 50 Гц или 3000 имп/мин. Например, в Северной Америке частота линии обычно составляет 60 Гц или 3600 циклов в минуту. Затем аналогично 2x F L в Европе будет 100 Гц или 6000 зн/мин, а в Северной Америке – 120 Гц или 7200 зн/мин.
Со всеми этими подробностями о том, как рассчитываются электрические частоты, анализируются различные неисправности двигателей переменного тока.
Перед любым спектральным анализом необходимо убедиться, что данные всегда собираются надлежащим образом.
Исходя из опыта, при проверке двигателя на наличие возможных электрических проблем рекомендуется, чтобы двигатель работал под нагрузкой, чтобы обеспечить магнитную напряженность поля. Общепринятой практикой является то, что двигатель должен работать не менее чем на 75 % от его максимальной номинальной нагрузки. Если двигатель работает полностью сам по себе, то есть не приводит в действие другие компоненты (редуктор, насос и т. д.), он обычно не имеет достаточной напряженности магнитного поля, чтобы выявить потенциально серьезные электрические проблемы.
Более того, некоторые проблемы с электричеством могут не проявляться при первом запуске, когда двигатель работает в холодном состоянии. Такие проблемы, как треснутые или сломанные стержни ротора или ослабленные соединения, могут проявиться только после того, как двигатель достиг своей рабочей температуры и произошло тепловое расширение.
Очень важно также знать, что точное определение конкретных электрических проблем не всегда возможно с помощью самой вибрации. Могут потребоваться другие электрические и физические испытания, такие как MCE, однако давайте сосредоточимся только на вибрациях и неисправностях, которые можно обнаружить с их помощью.
И последнее, но не менее важное, принимая во внимание предыдущие примеры и все написанное о наиболее распространенных частотах, создаваемых электродвигателями, в обычной программе мониторинга состояния разрешение спектра должно быть достаточно высоким, чтобы разделить эти частоты. Всякий раз, когда необходимо провести анализ асинхронного двигателя, рекомендуется собирать дополнительный спектр с использованием частотного диапазона 12 000 имп/мин с разрешением не менее 3200 строк (при наличии рекомендуется 6400 строк). Эта настройка даст разрешение 3,75 имп/мин/линию, что позволит разделить и четко различить механические и электрические частоты вибрации.
Подводя итог, можно сказать, что картины неисправностей состоят из общих частот, создаваемых электродвигателями, и могут быть разделены на проблемы, связанные со статором или ротором.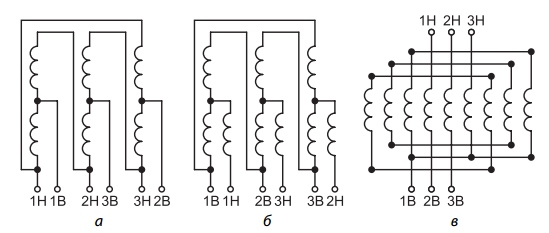
Эти электрические проблемы отличаются своими индивидуальными вибрационными характеристиками и подлежат анализу.
Наиболее типичными видами неисправностей двигателей переменного тока являются:
Эксцентриситет статора, короткое замыкание пластин и незакрепленное железо- Высокие амплитуды при 2x F L (удвоенная частота сети),
- Очень направленная вибрация из-за неравномерного стационарного воздушного зазора,
примечание : для асинхронных двигателей дифференциальный воздушный зазор не должен превышать 5%,
- Эксцентриситет статора может быть связан с мягкой опорой,
- Закороченные пластины статора могут вызвать неравномерный локальный нагрев, который увеличивается со временем работы,
- Расшатывание железа происходит из-за слабости или ослабления опоры статора.
- Боковые полосы, расположенные на частоте прохождения полюса (F P ) выше и ниже 2x F L ,
- Анализ часто требует «масштабирования» спектра для разделения 2x F L и гармоники скорости вращения,
- Частота прохождения полюса появляется на низкой частоте,
- Распространенные значения частоты прохождения полюса находятся в диапазоне приблизительно от 20 до 120 циклов в минуту (см.
