
Основы применения частотных преобразователей в насосных установках
В данной статье мы попытаемся разобраться с основами применения преобразователей частоты (частотно-регулируемого привода) в насосных установках.
Насосы и насосные установки
Определимся для начала с основными понятиями и принципами.
Насосная установка – это совокупность насосных агрегатов, трубопроводов, запорно-регулирующей арматуры, КИП, устройств управления и защиты.
Насосная установка характеризуется двумя основными параметрами: подача и напор.
Подача – это объем жидкости который способна перекачать насосная станция за единицу времени, измеряется в куб. метр / час.
Напор – это энергия необходимая для подъема жидкости на заданную высоту с преодолением сил трения в трубопроводной арматуре, измеряется в метрах. Напор и давление связаны между собой соотношением:
H=P/(ρg)
где H – напор; P – давление насоса; ρ – плотность жидкости; g – ускорение свободного падения.
- Водопроводные (ВНС) – это насосные станции которые подают воду от водоема до очистных сооружений (ВНС I подъема) и от очистных сооружений в распределительную сеть трубопроводов (ВНС II подъема). Так же существуют промежуточные повысительные насосные станции, в случае когда необходимо создать достаточное давление для поднятия воды на требуемую высоту.
- Канализационные (КНС) – перекачивают сточные воды к месту очистки.
- Теплофикационные – предназначены для подачи горячей воды в системе горячего водоснабжения и отопления.
- Технологические – насосные станции для перекачки различных жидкостей в технологических процессах.
 Главная КНС Нижнего Новгорода
Главная КНС Нижнего НовгородаПо виду рабочей камеры насосы делятся на динамические и объемные, те в свою очередь на лопастные, электромагнитные, трения, крыльчатые, роторные, возвратно-поступательные и другие.
В наше время чаще всего используются лопастные насосы: центробежные и осевые.
В основе работы центробежного насоса лежит действие центробежной силы на перекачиваемую жидкость. При вращении рабочего колеса жидкость приходит во вращение и под действием центробежной силы перемещается от центра колеса на периферию, а далее в напорную трубу.
Жидкость в осевом насосе перемещается вдоль оси насоса за счет воздействия лопастей рабочего колеса и создания разности давления под и над лопастью. По принципу работы он схож с пропеллером самолета или бытовым вентилятором.
Основной характеристикой насоса является зависимость напора от подачи, которая называется напорно-расходной.

Пример напорно-расходной характеристики насоса
В качестве электропривода насосов в основном используются асинхронные двигатели с короткозамкнутым ротором и синхронные двигатели переменного тока. Реже используются асинхронные двигатели с фазным ротором.
В статье мы рассмотрим работу насосных установок на примере центробежных насосов.
Режимы работы
Теперь рассмотрим режимы работы насосных установок и определимся от чего зависит тот или иной режим.
Режим работы насосных установок зависит либо от изменения расхода у потребителей, либо от притока сточной жидкости, в случае с канализационными насосными станциями.
Режимы водопотребления характеризуются временными графиками и бывают суточными, недельными, месячными и т.д.
 Пример суточного графика водопотребления за трое суток
Пример суточного графика водопотребления за трое сутокПодача насосных установок, работающих без промежуточных емкостей, должна быть равна потреблению. При увеличении потребления подачу необходимо увеличивать, при этом также увеличиваются потери напора в трубопроводах. Поэтому следует также увеличивать давление, которое развивают насосные установки. При уменьшении водопотребления следует снизить подачу и давление.
Ранее для регулирования характеристик насосных установок использовалось изменение числа работающих насосов и степени открытия задвижек. Теперь с появлением частотных преобразователей регулируется частота вращения рабочих колес насосов.
При работе с промежуточной (аккумулирующей) емкостью подача насосной установки отличается от потребления. В этом случае, если нет частотных преобразователей, насосные агрегаты включаются, когда уровень воды достиг минимальной отметки, и отключаются, когда уровень достигает верхней заданной отметки, и так далее по циклу.Таких циклов в сутки может быть до 50, а в некоторых случаях и до 100. Такое количество пусков, особенно для двигателей большой мощности, негативно сказывается на состоянии электроприводов.
Изменение характеристик центробежных насосов можно осуществить двумя способами: изменением степени открытия задвижки на напорном трубопроводе и изменением частоты вращения рабочего колеса насоса.
- регулирование задвижкой (дросселирование) – уменьшая степень открытия задвижки, мы уменьшаем подачу насоса, напор перед задвижкой увеличивается, а после задвижки уменьшается из-за потери напора на запорной арматуре. Открывая задвижку, мы увеличиваем подачу, напор который создает насос уменьшается, а напор за задвижкой увеличивается. Этот способ крайне неэкономичный, так как большое количество энергии теряется на сопротивлении запорной арматуры.
 Регулирование задвижкой
Регулирование задвижкой- регулирование изменением частоты вращения насосов – при таком регулировании при снижении частоты вращения, кривая напорно-расходной характеристики насоса перемещается вниз. Подача, напор насоса и напор в трубопроводе одновременно уменьшаются. При увеличении частоты вращения насоса, увеличивается подача и напор насоса, и напор в сети.
 Частотное регулирование
Частотное регулированиеДанный способ регулирования является более экономичным, но требует применения частотных преобразователей.
При регулировании с помощью частотных преобразователей снижение энергопотребления равно потерям, которые обусловлены повышением напоров при работе насосов с постоянной частотой вращения.
Особенности работы насосов при изменении частоты вращения
Регулирование частоты вращения насосов в насосной установке дает возможность оптимально распределить нагрузки между насосами, выровнять их КПД и удерживать в зоне оптимальных КПД их рабочие точки, снизив затраты энергии к минимальным значениям.
При изменении частоты вращения насоса пропорционально изменяются и все его характеристики. Но при низкой частоте вращения порядка 10-15% от номинальной происходит нарушение зависимости между подачей и напором насоса. Его характеристики теперь нельзя представить в виде параболической кривой, а только россыпью точек. Потому диапазон регулирования частоты вращения насоса не должен выходить за предельную нижнюю границу.
Так же при работе насосов с пониженной частотой вращения могут возникнуть такие опасные явления как кавитация и помпаж.
Кавитация – это явление при котором поток жидкости перестает быть сплошным, сопровождающееся образованием пузырьков газов и паров жидкостей. Кавитация опасна дополнительными потерями электроэнергии и разрушением рабочих элементов насоса. Она может возникнуть в случае если существующий напор на всасывающем трубопроводе меньше требуемого. При снижении частоты вращения насоса, также в большую сторону увеличивается требуемое значение напора на всасывающем трубопроводе, что следует учитывать во избежание возникновения кавитации.
Помпаж – может возникнуть в насосах с неустойчивыми (лабильными) напорно-расходными характеристиками при пересечении лабильной характеристики насоса с характеристикой трубопровода в двух точках. В этом случае насос начинает попеременно работать с параметрами двух точек и вся система становится неустойчивой. Происходят гидравлические удары, резкое закрытие обратных клапанов, частое изменение потребляемой мощности и нестационарные режимы работы сети электроснабжения.
При оснащении насосных установок частотно-регулируемым приводом следует не забывать о том, что:
- Помимо экономии электроэнергии необходимо обеспечить нормальный режим работы насосного агрегата;
- Следует анализировать прогнозируемые режимы работы насосов на низкой частоте вращения и учитывать это при создании автоматизированных систем.
Внедрение частотно-регулируемого привода насосных установок весьма эффективно, но требует профессионального подхода.
Частотно-регулируемый электропривод
Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
Схема 1. Частотно-регулируемый привод.
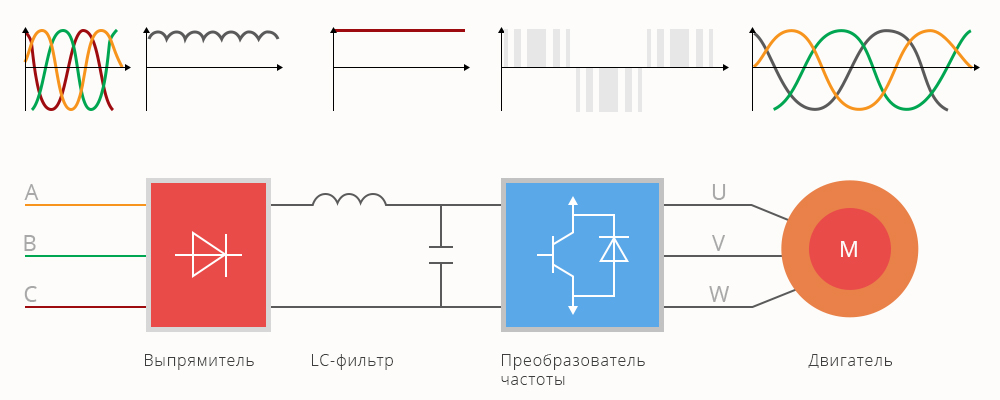
Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.
- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.
- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.
- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.
-
В результате:
- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
Недостатки систем частотного регулируемого привода
- Создают сильные помехи, которые мешают другой электронике функционировать. Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
- Высокая стоимость ЧРП. Однако она окупится через 2-3 года.
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ: различное насосное оборудование, АСУ.
Стройкомплекс: краны, подъемные механизмы.
Транспорт: судовой привод, электротранспорт.
Как выбрать частотный преобразователь
Следует принять во внимание:- Мощность и разновидность асинхронного электродвигателя.
- Диапазон и точность регулировки скорости.
- Необходимость точного поддержания момента и скорости вращения на валу двигателя.
- Соответствие конструкции устройства персональным пожеланиям.
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Чем частотно-регулируемые асинхронные двигатели должны отличаться от общепромышленных?
Чем частотно-регулируемые асинхронные двигатели должны отличаться от общепромышленных?
1) Форма пазов ротора
Вследствие «мягкого» частотного пуска на роторе не требуются глубокие пазы. При проектировании таких двигателей вообще не следует ставить задачу обеспечения кратностей пускового и максимального моментов, поскольку они получаются автоматически в замкнутой системе регулирования.
Управляя частотой и напряжением, можно регулировать не только скорость вращения, но и скольжение, т.е. минимизировать потери в роторе. А векторное управление позволяет поддерживать такую величину реактивной составляющей тока статора, при которой коэффициент мощности и КПД являются наибольшими.
Вообще, если оптимально спроектировать машину для частотного регулирования, возможно получить на 25% большую мощность, чем у обычной того же объема, либо уменьшить объем при той же мощности. Соотношение активных материалов перераспределяется в сторону увеличения проводниковых.
Глубокие пазы в серийном асинхронном двигателе (АД) имеют на 15-25% избыточной площади при работе в установившемся номинальном режиме. Этот резерв в частотно-регулируемом приводе можно использовать для уменьшения активного сопротивления ротора, т.е. и рабочего скольжения, и индуктивного сопротивления рассеяния (для увеличения полезного момента). Более широкие пазы имеют на 15-25% меньшую индуктивного рассеяния.
2) Число пар полюсов
Скорость вращения производственного механизма определяется частотой питания двигателя, количеством его пар полюсов и передаточным числом редуктора. Требуемую скорость вращения можно обеспечить при различных сочетаниях этих трех величин. При поиске оптимального должны учитываться:
- диапазон регулирования частоты и стоимость ПЧ;
- целесообразность использования редуктора и его стоимость;
- стоимость АД и потребляемой энергии за время эксплуатации привода.
Максимальное число полюсов на современных единых сериях асинхронных электродвигателях – 12.
Однако существуют и попытки изготовления АД для частотно-регулируемого привода лифта и рольгангов с 20 парами полюсов. Вероятно, рекордное для АД с короткозамкнутым ротором количество полюсов 32 имеют машины Сафоновского электромашиностроительного завода на мощности 30 и 75 кВт. Только благодаря завышенной массе (1,9 и 2,7 т, соответственно) они обладают приемлемыми энергетическими показателями: cos ф = 0,57-0,65, КПД 84-88%.
3) Номинальное напряжение двигателя
Известно, что если в регулируемом приводе серийный двигатель, без специальных мер ему зачастую не хватает напряжения на выходе преобразователя частоты. Следовательно, с целью упрощения системы логично предположить, что двигатель для комплектного частотного привода может быть рассчитан на нестандартное напряжение основной гармоники на выходе ПЧ.
Оптимальную величину этого напряжения должны рекомендовать специалисты по преобразовательной технике.
4) Синусоидальность напряжения и тока двигателя
Считается, что частотник тем лучше, чем большую синусоидальность напряжения или тока в двигателе он обеспечивает. Это требование опять же следует из характеристик серийных двигателей, в конструкциях которых предусматривается ряд мер, обеспечивающих синусоидальность поля в воздушном зазоре (распределение обмотки по пазам, укорочение ее шага и скос пазов, а в СД еще и профилирование полюсов). А нужно ли все это делать в частотно-регулируемых машинах и обязательна ли для них синусоидальность тока? Исследования дают на это отрицательные ответы.
Это сразу ставит проблему оптимизации обмоток статора частотно-регулируемых двигателей, критерии, проектирования которых должны отличаться от традиционных.
Использование обмоток характеризует коэффициент совместимости, под которым понимается отношение средних плотностей энергии поля в зазоре за период изменения тока при чисто гармонических временных и пространственных функциях и с учетом обоих типов гармоник.
Существуют такие сочетания временных и пространственных кривых, при которых использование обмотки не уступает синусоидальным. Исследования в этом направлении еще далеко не исчерпаны.
5) Охлаждение
Из-за низкой эффективности собственных вентиляторов при работе на малых частотах двигатели должны быть снабжены автономными вентиляторами-наездниками со своим приводом. Это необходимо для охлаждения как активных частей, так и подшипников.
При работе на частотах выше номинальной сам вентилятор-наездник может стать причиной падения крутящего момента двигателя, так как вентиляторная характеристика.
6) Перенапряжения
ШИМ-коммутация современных частотных преобразователей вызывает волновые переходные процессы и импульсные перенапряжения в системе ПЧ-двигатель. Характер процессов и величина перенапряжений зависят от крутизны фронтов питающих импульсов, индуктивных и емкостных параметров системы. Неблагоприятная величина перенапряжений в обмотке статора достигает двойного значения амплитуды поступающих импульсов и даже больше. Для защиты от них надо не только использовать фильтры, но и усиливать изоляцию хотя бы начальных витков обмотки, правильно выбирать длину и конструкцию кабеля между ПЧ и двигателем, заземления.
Высокочастотная коммутация в преобразователях частоты обуславливает появление подшипниковых токов в двигателе, природа, вредные последствия (повышенный износ подшипников) и способы борьбы с которыми еще требуют исследований. Некоторые фирмы уже предлагают использовать в частотно-регулируемых АД подшипники с изолированным внутренним или наружным кольцом, с керамическими шариками и другие меры. Подшипники с диэлектрическим покрытием выпускаются и в России.
7) Подшипники, балансировка ротора
Если двигатель будет работать в зоне очень высоких скоростей вращения, этим условиям должны соответствовать его подшипники, их смазка, уплотнения, а также балансировка ротора.
8) Шумы и вибрации
Вентиляционный шум двигателей имеет две составляющие: аэродинамическую и структурную (от механических вибраций). При регулировании скорости вращения виброакустические показатели, естественно, изменяются, причем в диапазонах низких скоростей превалирует структурная, а высоких – аэродинамическая.
Значения скоростей и величины диапазонов зависят от числа полюсов двигателя. Разработчики и производители в разной мере учитывают рассмотренные выше особенности регулируемых двигателей переменного тока, хотя все допускают использование в частотных приводах обычных серийных машин с понижением их номинальной мощности в среднем на 15%.
9) Термозащита
Если электродвигатель 380/220 подсоединить в ∆ и подключить к 380В, в данном режиме ротор электродвигателя будет перегреваться без специальной адаптации АД под данный режим. Необходима термозащита – на обмотке статора, а также две на подшипники – соответственно, с обеих сторон АД при работе электродвигателя на скоростях выше номинальной.
Примечание: Длинные кабели
- При использовании длинных кабелей для электродвигателей невозможно применение векторного управления (ограничение у Mitsubishi – 30м).
- Также при длинных кабелях необходимо использовать фильтр или дроссель для того, чтобы избежать высоких пиков напряжения на асинхронных двигателях.
Частотно-регулируемые асинхронные двигатели представлены в Каталоге. Сотрудники «НТЦ Приводная Техника» помогут осуществить подбор оборудования специально для решения задач Вашего бизнеса.
Методы управления преобразователем частоты.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существуют следующие основные способа управления:
1. Скалярное
· Скалярное управление U/f;
· Скалярное управление U/f с энкодером;
2. Векторное
· Векторное управление с разомкнутым контуром;
· Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
СКАЛЯРНОЕ РЕГУЛИРОВАНИЕ
Способ управления U/f
Скалярный метод управления асинхронным электродвигателем переменного тока, заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (U/f) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение U/f вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения U/f мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение U/f увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в невозбуждённом состоянии.

Зависимость частоты питания двигателя от времени при скалярном упрравлении

Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
U/f — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/f составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/f определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/f одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
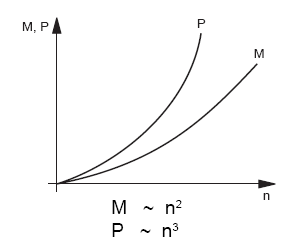
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/f предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Способ управления U/f с энкодером
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Таким образом, если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/f.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/f минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/f. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Когда используется скалярное управлени
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для применений, где нет переменной нагрузки и отсутвуют высокие динамические нагрузки (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
А процесс скалярного регулирования синхронного двигателя с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
· во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
· во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
· также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ
Векторное управление — метод управления бесщеточными электродвигателями переменного тока, который позволяет независимо и практически безынерционно регулировать скорость вращения и момент на валу электродвигателя.
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.

Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания и крутящего момента. Для достижения максимальной производительности, преобразователь частоты должен держать данные вектора разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Преимущества векторного управления:
· высокая точность регулирования скорости;
· плавный старт и плавное вращение двигателя во всем диапазоне частот;
· быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
· увеличенный диапазон управления и точность регулирования;
· снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
К недостаткам векторного управления можно отнести:
· необходимость задания параметров электродвигателя;
· большие колебания скорости при постоянной нагрузке;
· большая вычислительная сложность.
Сравнительная таблица методов управления частотным преобразователем.
|
Метод управления |
Диапазон управления скоростью |
Погрешность скорости3, % |
Время нарастания момента, мс |
Пусковой момент |
Цена |
Описание |
||
|
Скалярный |
1:101 |
5-10 |
Не доступно |
Низкий |
Очень низкая |
Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. |
||
|
Векторный |
Линейный |
Полеориентированное управление |
>1:2002 |
0 |
<1-2 |
Высокий |
Высокая |
Позволяет плавно и быстро управлять основными параметрами двигателя — моментом и скоростью. Для работы данного метода требуется информация о положении ротора. |
|
Прямое управление моментом с ПВМ |
>1:2002 |
0 |
<1-2 |
Высокий |
Высокая |
Гибридный метод, разработанный для того чтобы объединить преимущества http://engineering-solutions.ru/motorcontrol/vector/#foc и http://engineering-solutions.ru/motorcontrol/vector/#dtc. |
||
|
Нелинейный |
Прямое управление моментом с таблицей включения |
>1:2002 |
0 |
<1 |
Высокий |
Высокая |
Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. |
|
|
Прямое самоуправление |
>1:2002 |
0 |
<1-2 |
Высокий |
Высокая |
Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. |
||
Список используемой литературы:
1. Botan Electric. «Как правильно выбрать метод управления преобразователем частоты?»: http://elenergi.ru, 2016
2. Cristian Busca. «Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.»: Aalborg universitet, 2010
3. Bial Akin, «Nishant Garg. Scalar (V/f) control of 3-phase induction motors. Application report. SPRABQ8.- Dallas, USA.»: Texas Instruments
4. Статьи http://engineering-solutions.ru
Для чего необходимо частотное регулирование насосов
Насосные станции представляют собой систему, работающую на переменных нагрузках, возникающих в процессе водопотребления. В зависимости от уровня водопотребления, нагрузки могут значительно падать или возрастать. В этом случае, такое условия как регулирование работы насосов является обязательным, так как пониженные расходы воды могут привести к нарастающему давлению в системе, что может привести к таким последствиям как:
- потеря энергии;
- потеря жидкости на негерметичных стыках;
- повышение расходов на эксплуатацию;
- повышение износа оборудования.
Вследствие этого, вопрос о регулировании стал неотъемлемой частью использования насосов. На сегодняшний день преобразователи частоты стали наиболее приемлемым вариантом из всех когда-либо возникавших, способных за счёт регулирования числа оборотов вала электропривода, регулировать скорость его вращения. Вследствие этого, выполняется обеспечение системы требуемым напором с оптимизацией параметров минимального расхода и оптимальных значений КПД соответственно. Таким образом, данный метод позволяет поддерживать в норме общее давление гидросистемы, уменьшая обороты в момент малых расходов и повышая при увеличении потребления ресурсов, например, воды в коммунальных службах при подаче населению. В целом же, использование частотников не ограничивается на указанных и промышленных насосах. Они вполне смогут обеспечить работу бытовых насосов, используемых для водяных скважин, для насосов фекального типа и прочих, помогая сэкономить как минимум 30% электроэнергии, повышая окупаемость самого преобразователя.
Кроме самих преобразователей, к числу оборудования для выполнения частотного регулирования также можно отнести:
- Трансформаторы силовые, служащие как звено согласования параметров напряжения, между источником питания и инвертора с двигателем;
- Установленные у входа и выхода частотника фильтры;
- Высоковольтные коммуникации и защитные устройства силовых цепей.
Эффективность применения преобразователей для насосов
Суть работы частотного преобразователя основывается на плавном бесступенчатом регулировании скорости вращения вала двигателя, передающего нагрузку на связанные с ним механизмы. Наиболее часто использую преобразователи для однофазных двигателей, применяемых в насосах и работающих по принципу переменного вращающего момента. Кроме того, современные частотные устройства способны не только выполнять функцию управления, но и ряд других задач, в том числе и защитных, влияющих на эффективность работы насосного оборудования:
- защищают насосы и электродвигатели от перегрузок;
- выполняют защиту от перепадов напряжения;
- предотвращают возможность возникновения коротких замыканий;
- предотвращают перегрев двигателя насосного устройства;
- предотвращают возникновение гидроударов в системе;
- одинаково эффективное управление при использовании нескольких насосов;
- максимально облегчают эксплуатацию насосных станций, проведение ремонтных операций, исключая существенные потери в водоснабжении.
Спроектированные на профессиональном уровне, использующие множество функций автоматической диагностики и определения параметров, а так же чётко построенный алгоритм работы, использование устройств для частотного регулирования насосами обрело множество выгодных решений, среди которых:
- Автоматическое включение/отключение насосов и насосных станций по сигналу датчиков давления;
- Автоподдержание давления при меняющемся расходе рабочего вещества;
- Защита от включения насоса при отсутствии воды или закрытой задвижке;
- Даёт возможность перекачивать различные типы жидкостей, в том числе и по температурному значению;
- Выполняет сглаживание пусковых моментов, защищая от воздействия резких гидропотоков;
- Способствует снижению энергозатрат на эксплуатацию систем;
- Снижают потребление электрической энергии при любых допустимых условиях мощностной эксплуатации двигателя;
- Возможность регулировать работу двигателей и, соответственно насосов на расстоянии, благодаря съёмному пульту управления и прочие.
Примеры использования насосов работающих с частотными преобразователями
- Системы насосов подъёма, задачей которых является поддержание в пределах заданного уровня поддерживать давление в системах водоотвода и водоснабжения. При расходе жидкости на низком уровне, частотные устройства переводят насосный двигатель в режим ожидания, проведя предварительно подкачку (нагнетание) давления, после чрезмерного упадка которого он снова запускается.
- Система орошения. Используемые в сельском, садовом и прочих хозяйствах, поддерживают постоянную стабильность подачи воды, при этом, контролируя время и дату запуска с помощью встроенной панели интеллектуального управления. Плавный старт и заполнение труб на низкой скорости позволяют сохранить от разрушения избыточным давлением всю систему полива.
- Система поддержки заданных уровней резервуаров. Используемые для промышленных и прочих целей резервуары сбора воды имеют ограничения, контроль за не превышение которых ложится на систему вправления. Так же, она регулирует чистоту самого насоса, запуская функцию очистки крыльчаток от различных отложений, отягощающих уровень работы устройства.
Конечно же, список сфер и условий использования далеко не полон, что говорит о высокой эффективности и крайней необходимости использования частотного регулирования насосов с помощью преобразователей и прочего комплексного оборудования в различных сферах деятельности человека, как бытового, так и промышленного, производственного и прочего характера.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
грамотный подход к выбору необходимого оборудования / Статьи и обзоры / Элек.ру
Во всем мире, в том числе и в нашей стране, на сегодняшний день является актуальной задача преобразования электрической энергии в механическую. Для этой задачи используются различные электроприводы, позволяющие управлять работой синхронных и асинхронных двигателей, которые в свою очередь приводят в движение необходимый механизм, будь то насос или конвейер. Для решения этих задач может применяться разное оборудование — в основном это частотно-регулируемый привод и устройство плавного пуска. В этой статье будут рассмотрены основные принципы работы этого оборудования, а также рекомендации по выбору нужных приборов для решения производственных задач.
Начнем с терминологии.
Частотно-регулируемый привод (ЧРП, частотный преобразователь, ПЧ) это устройство для управления синхронным и асинхронным двигателем, состоящее из двух основных функциональных модулей:
- Выпрямитель (моста постоянного тока) — преобразует переменный ток промышленной частоты и амплитуды в постоянный.
- Инвертор — осуществляет преобразование постоянного тока в переменный нужной частоты и амплитуды.
В результате двигатель сохраняет номинальный момент на валу и движется с необходимой скоростью.
Устройство плавного пуска (УПП) — устройство для плавного безударного пуска с ограничением пускового тока, длительной работы в номинальном режиме и торможения высоковольтных асинхронных электродвигателей.
Итак, остановимся подробнее на выборе устройств.
Выбор частотно-регулируемого привода
При выборе модели ЧРП необходимо обратить внимание на следующие моменты.

— Мощность преобразователя.
Чем шире мощностной ряд, тем больше механизмов, которыми можно будет управлять с помощью данного ЧРП. Сохраняется тип подключения, опциональные компоненты. На выходе — большое число задач, решаемых работой одного прибора.
— Входное напряжение.
В России качество многих сетей на сегодняшний день оставляет желать лучшего. Потому характеристика входного напряжения часто бывает величиной нестабильной. Данная проблема частично решается посредством установки дросселей на входе преобразователя. Однако, чем заявленный диапазон входного напряжения ЧРП шире, тем лучше.
— Режимы управления ЧРП.
Существуют различные способы управления ПЧ. Наиболее распространенные: программируемый логический контроллер, компьютер, встроенная панель или выносной пульт, а также напрямую через клеммы управления.
— Методы управления.
Преобразователи частоты могут работать в скалярном и векторном режимах.Скалярный режим более простой, но при этом имеет свое преимущество: возможность управления более мощными электродвигателями при сохранении тех же силовых элементов в цепи. Применяется чаще всего при работе с насосами, вентиляторами и конвейерами. Векторный режим в отличие от скалярного обеспечивает управление магнитным потоком ротора. При выборе такого управления, возможно работать с двигателем как в обычном режиме, так и в режимах с повышенной точностью задания скорости или момента на валу.
— Диапазон регулирования частоты. Нижний предел указывает на диапазон регулирования скорости электродвигателя. Верхний предел является значимой величиной при работе с двигателями высокой номинальной частоты до 800 Гц.
Это основные параметры, на которые необходимо обращать внимание при выборе ЧРП. Разумеется, здесь представлены не все характеристики ПЧ. В любом случае, если нет уверенности в правильности сделанного выбора, лучше обратиться к специалистам. Квалифицированные специалисты Корпорации Триол всегда рады Вашему звонку или письму.
Выбор устройства плавного пуска
Принцип работы УПП основан на ограничении напряжения сети на нагрузке при помощи симисторов или тиристоров, включенных встречно-параллельно. Исходя их этого, регулируются ток и напряжение на двигателе. УПП предназначается для разгона и останова асинхронного двигателя, имеющего высокий пусковой момент. При выборе УПП необходимо остановиться на следующих свойствах.

— Шунтирование.
После запуска двигателя с нагрузкой устройство желательно вывести из силовой цепи по двум причинам:
1. УПП необходимо подготовить к последующей работе, соответственно прибору нужно дать остыть после пуска;
2. Минимизируются потери из-за падения напряжения на симисторах. Этого можно достичь, соединяя пофазно вход и выход УПП шунтирующим контактором. Однако тепловые потери на силовых ключах намного меньше потерь на УПП в режиме пуска даже при длительном протекании силового тока. Поэтому некоторые УПП производятся и без шунтирующего контактора.
— Управление.
По элементной базе разделяют на аналоговые и цифровые УПП.
— Фазность.
По числу ключей в фазах УПП делятся на неполнофазные (имеющие ключи в 1…2 фазах) и полнофазные (имеющие ключи во всех фазах). Полнофазные УПП обеспечивают симметричное распределение токов по фазам.
— Контроль величины тока.
Чаще всего УПП, не имеющие функции контроля тока, повышают за определенное время напряжение на двигателе от начального до номинального значения. Если же стоит задача ограничения тока, без данной функции не обойтись. В случаях, когда наблюдается ограниченная мощность сети, существует вероятность аварии из-за превышения предельно допустимого тока. УПП, имеющие данную функцию, способны обеспечить плавное нарастание тока в начале процесса пуска.
— Торможение.
При подаче на электродвигатель постоянного тока происходит его интенсивное торможение. Функция УПП подачи тока на обмотку чаще всего применяется в системах, которые могут двигаться сами собой при отсутствии тормоза, — подъемники, фуникулеры.
— Защита.
УПП имеет ряд защит двигателя и механизма. В этот комплекс входят: защита от перекоса фаз, изменения чередования фаз, перегрева радиаторов УПП, защита от перегрузки и неисправностей силовой цепи, слишком маленького тока, от снижения частоты. Но стоит оберегать прибор от короткого замыкания в цепи нагрузки, в противном случае УПП может выйти из строя. Однако при правильном монтаже короткое замыкание — процесс не мгновенный, и прибор, скорее всего, просто отключится при снижении сопротивления нагрузки. Но, прежде чем снова запускать его в работу, необходимо устранить причину, приведшую к короткому замыканию.
На сегодняшний день различные отрасли российской промышленности применяют электропривод переменного тока для решения своих задач: водоснабжение, энергетика, атомная, оборонная промышленности, нефтегазовая отрасль, автоматизированное производство, крановое и лифтовое производство, вентиляция, кондиционирование. Помимо перечисленных характеристик, у преобразователя частоты и устройства плавного пуска, также важны и другие параметры: номинальные мощность и ток двигателя, напряжение питания, число пусков в час, длительность пуска/останова, пусковой ток.
Преобразователи частоты и устройства плавного пуска с фирменным логотипом «Триол» работают и на северных заснеженных просторах, и в Волгоградских степях, и в Сибири, и на жарком черноморском побережье. Перечислить все машины и механизмы, в приводах которых установлено оборудование «Триол», представляется вообще весьма затруднительным. Вот лишь небольшая часть из всего многообразия:
мельницы, дробилки, грануляторы, экструдеры, массажеры, волчки, куттеры, гомогенизаторы, жом-прессы, этикетировочные аппараты, укупорочные машины и много чего еще специфического. Сюда же следует добавить и привычные слуху насосы, вентиляторы, транспортеры, конвейеры, технологические линии.
В любой точке России Корпорация «Триол» предоставляет качественное сервисное обслуживание и практические консультации по вопросам внедрения и использования продукции. Услуги сервисной поддержки представлены 9 сервисными центрами, расположенными в разных регионах страны для обеспечения максимальной логистики и оперативного реагирования на возможные проблемы, возникшие у наших клиентов.
Источник: Андрей Степанов, Корпорация «Триол»
Основные способы управления частотным электроприводом
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Содержание:
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.

В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Способ управления U/F
Управление вольт-на-герц, наиболее часто называемое как U/F, пожалуй, самый простой способ регулирования. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода (но рекомендовано). Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/F довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.

Модель с постоянным моментом вращения имеет постоянный вращающий момент во всем диапазоне скоростей при одинаковом соотношении U/F. Модель с переменным соотношением вращающего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
U/F — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/F без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/F.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/F составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/F определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/F одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/F предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.

Способ управления U/F с энкодером
Если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/F.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/F. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.

Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.

Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания (Id) и крутящего момента (Iq).
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания (Id) и крутящего момента (Iq). Для достижения максимальной производительности, преобразователь частоты должен держать Id и Iq разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.

В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
