
Частотное регулирование скорости асинхронного двигателя схема
Автор admin На чтение 10 мин Просмотров 5 Опубликовано Обновлено
Содержание
- Частотный регулятор скорости для асинхронного двигателя
- Устройство и принцип работы частотного регулятора
- Структура частотного регулятора
- Состав частотных преобразователей
- Однофазные преобразователи частоты
- Регулирование скорости асинхронного двигателя
Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Асинхронный двигатель – самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
- Механическим способом. Для этого вал подключают к редукторам, муфтам и другим устройствам.
- Путем изменения числа пар полюсов, величины или частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Наиболее перспективный метод регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
Устройство и принцип работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя.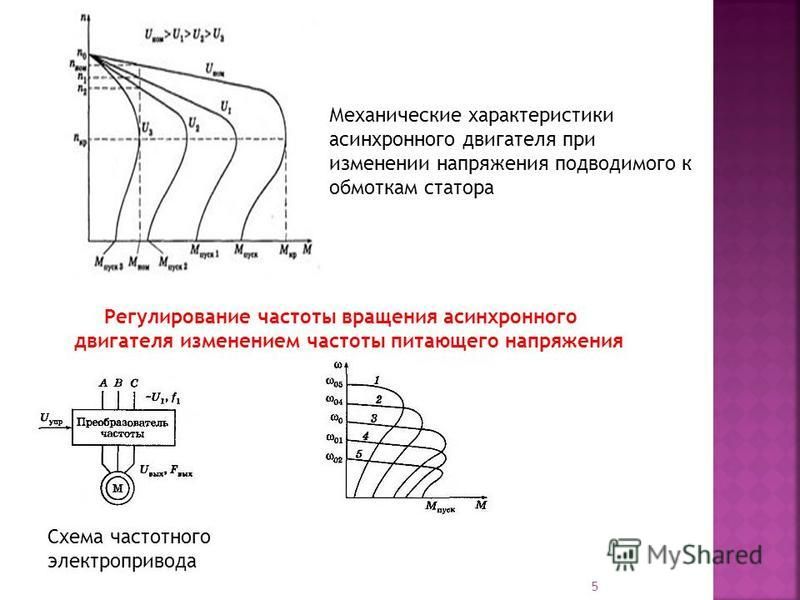 Прямые ПЧ требуют сложной схемы управления.
Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Кроме выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК, другими частотными преобразователями.
- Встроенная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, изменения настроек, а также другие данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает снижение реактивной высокочастотной составляющей, снижающей качество электроэнергии и отрицательно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие элементы.
Кроме аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Кроме базовых составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.
При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.
Таким образом, управление однофазными и трехфазными асинхронными электродвигателями путем изменения частоты значительно превосходит метод регулирования величины напряжения, механические способы.
Источник
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.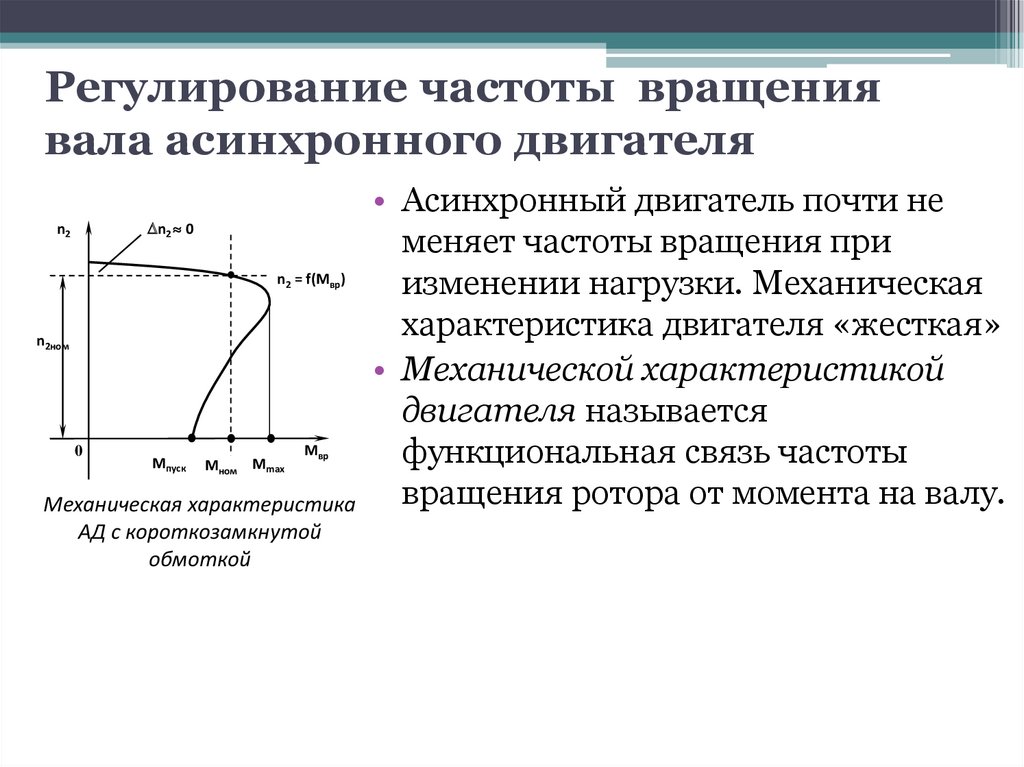
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.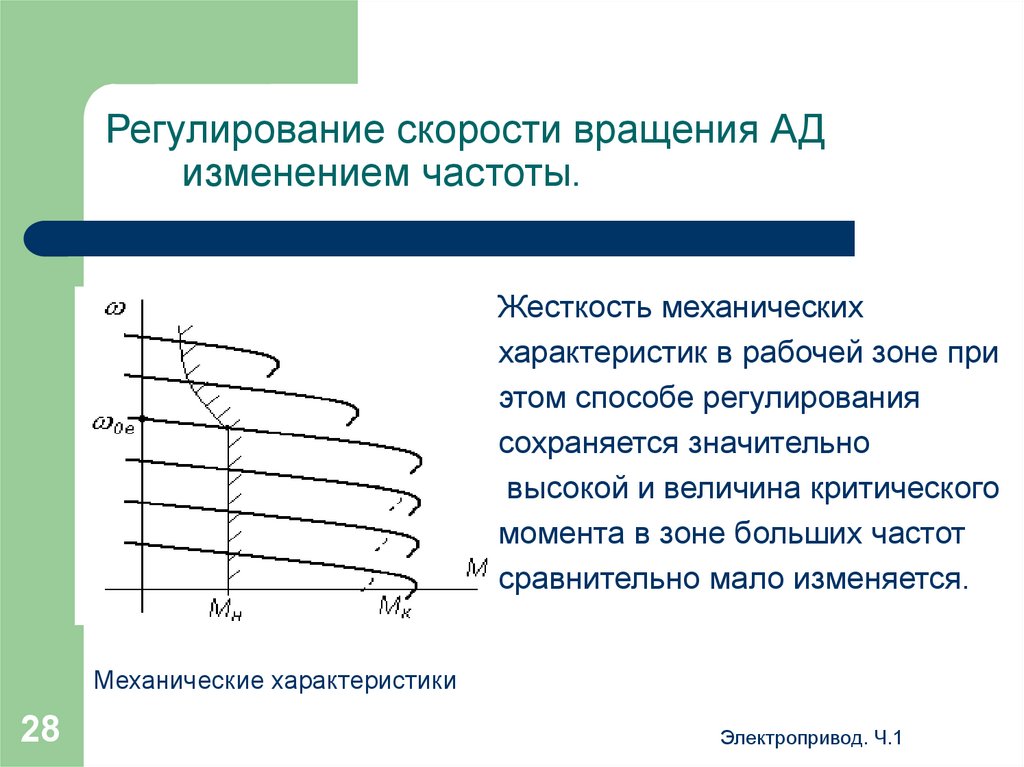
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.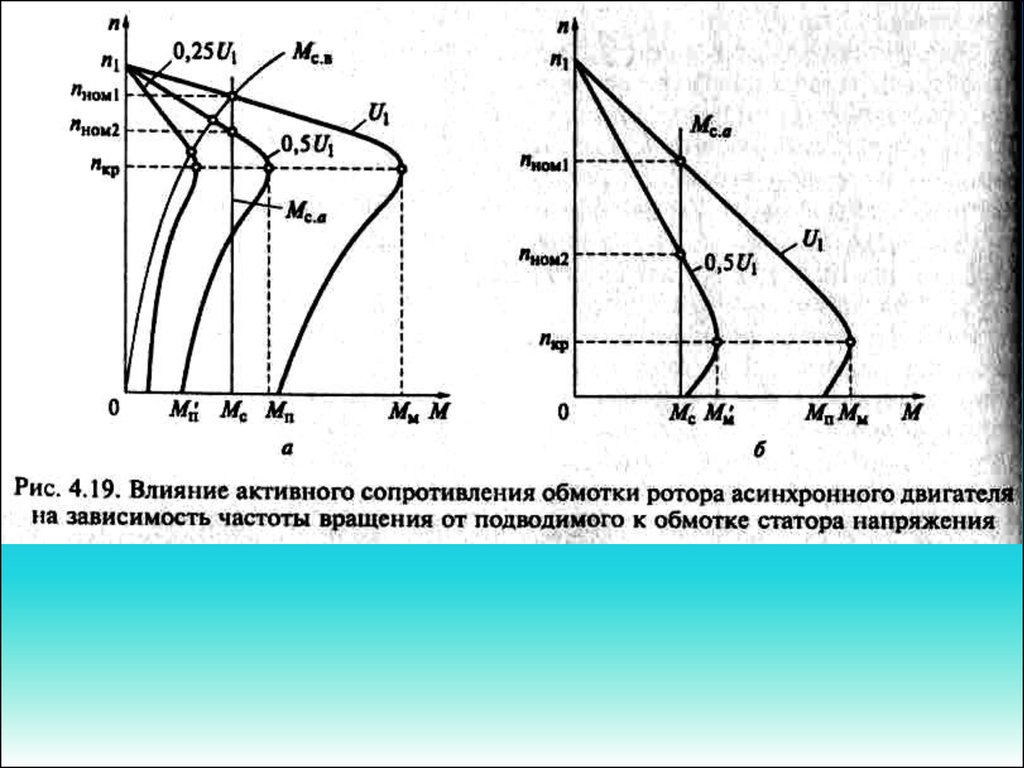
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.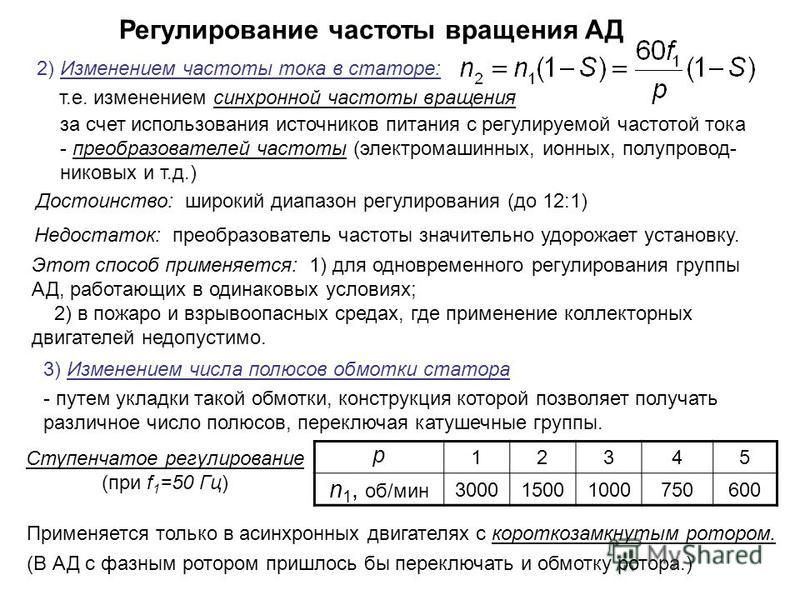
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1.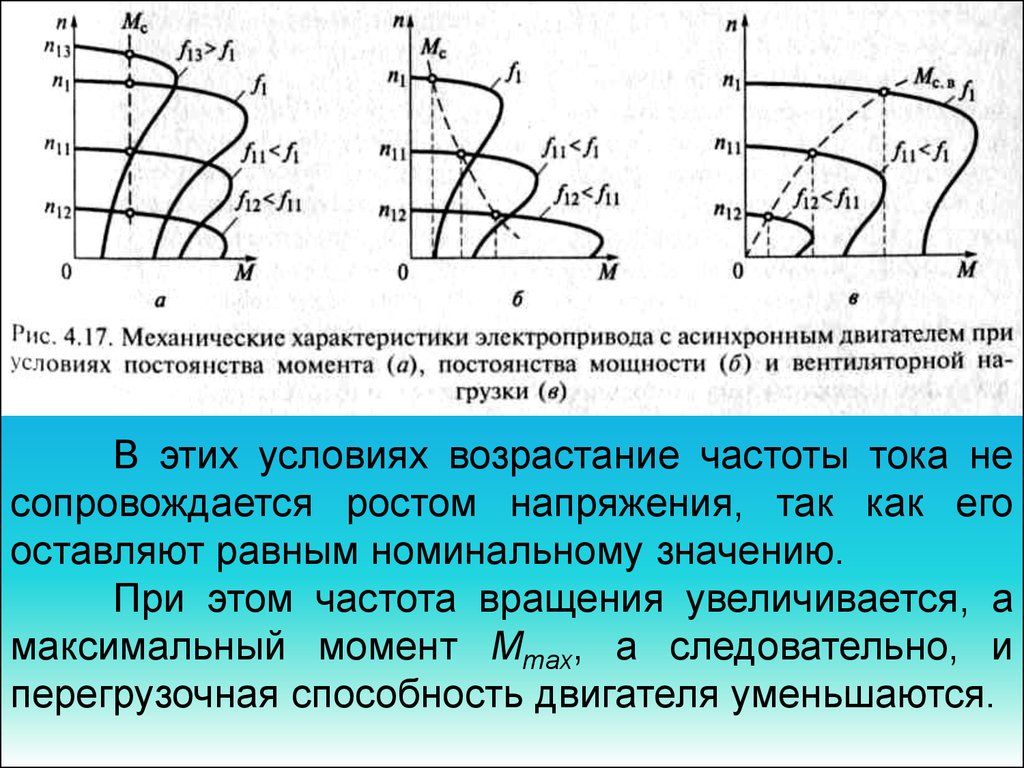 Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов.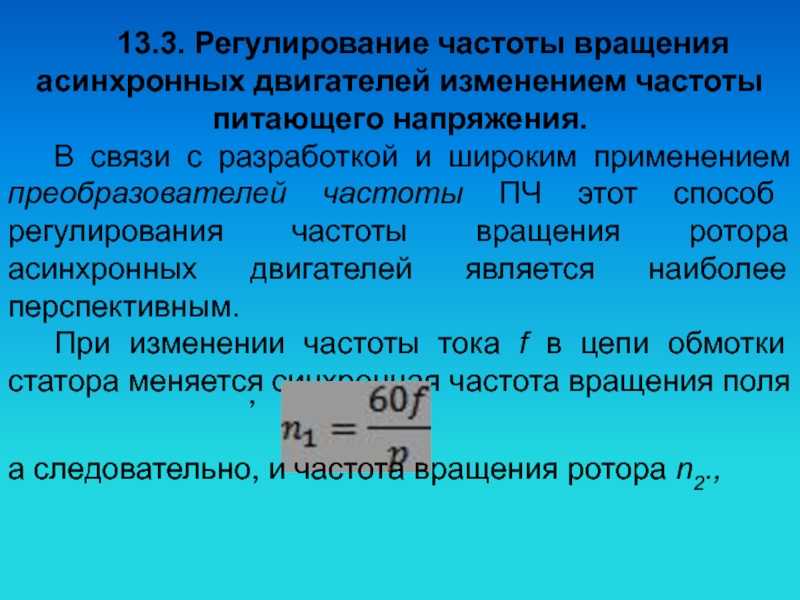 В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Источник
Регулирование скорости асинхронного электродвигателя путем изменения частоты питающей сети
Наиболее экономичным способом регулирования скорости вращения асинхронных электрических машин с короткозамкнутым ротором является изменение частоты питающего напряжения последних. При изменении частоты также будут меняться и параметры асинхронной машины. Для обеспечения необходимых значений пускового и критического моментов, а также коэффициента мощности и коэффициента полезного действия КПД, необходимо с изменением частоты соответствующим образом изменять и напряжение, подводимое к зажимам электродвигателя.
При изменении частоты также будут меняться и параметры асинхронной машины. Для обеспечения необходимых значений пускового и критического моментов, а также коэффициента мощности и коэффициента полезного действия КПД, необходимо с изменением частоты соответствующим образом изменять и напряжение, подводимое к зажимам электродвигателя.
Общие закономерности регулирования скорости асинхронных машин путем изменения частоты питающей сети были исследованы академиком М.П. Костенко еще в 1925 году.
Основное соотношение, связывающее изменение частоты и напряжения, в зависимости от характера статического момента механизма может быть выведено из общих соотношений, представляемых эквивалентной схемой замещения. При постоянной частоте питающей сети критический момент асинхронного электродвигателя будет равен:
Где: m1 – количество фаз в обмотке статора; r1 и x1 – активное и индуктивное сопротивление статорной обмотки; х2/ — индуктивное сопротивление роторной обмотки, приведенной к первичной обмотке; f – частота питающей сети.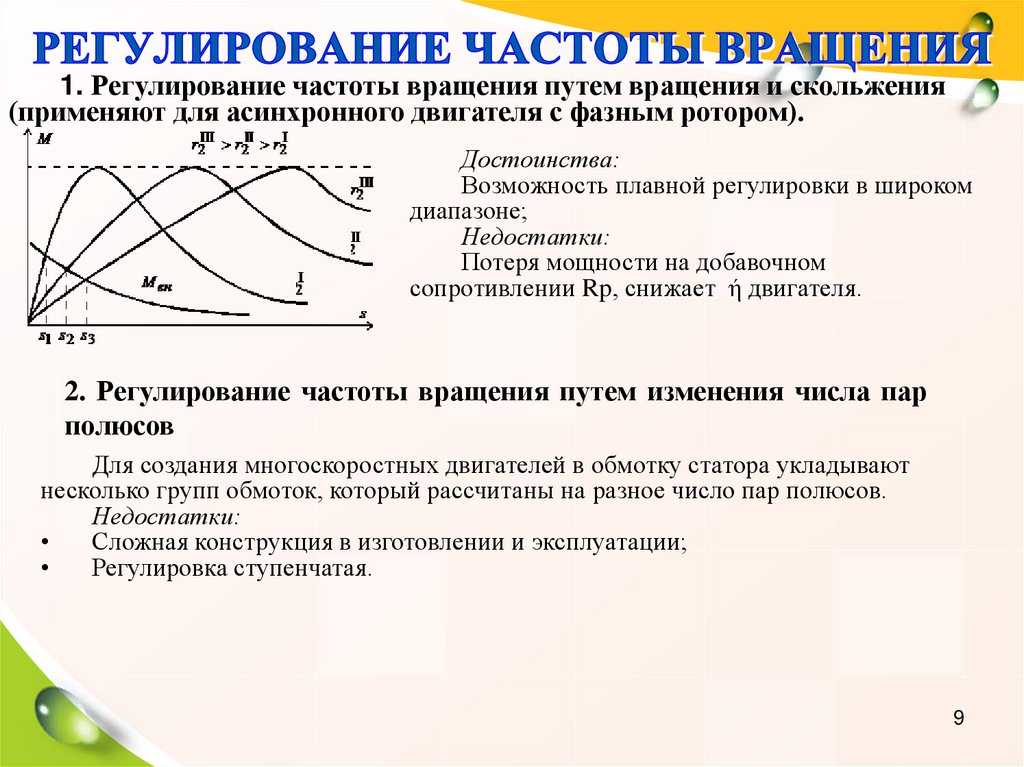
Если пренебречь активным сопротивлением статорной обмотки, выражение (1) примет вид:
Индуктивные сопротивления x1 и х2/ зависят от частоты питающей сети. Поэтому при переменной частоте предыдущее выражение должно быть записано как:
Для сохранения неизменной перегрузочной способности машины отношение критических моментов при любых скоростях должно быть равно отношению соответствующих статических моментов:
Где Мс1 и Мс2 – статические моменты, соответствующие скорости электрической машины при частотах f1 и f2; U1 и U2 – напряжения, подводимые к двигателю при тех же частотах.
Полученная формула (4) показывает, что оптимальный закон изменения напряжения при частотном регулировании определяется характером изменения статического момента в зависимости от частоты. В таблице ниже сопоставлены значения моментов, мощностей и напряжений при различных характерах зависимости статического момента от скорости.
Анализ, проведенный академиком М.П. Костенко на базе упрощенной круговой диаграммы, показал, что при соблюдении условия (4) будет иметь место постоянство cosφ, а КПД электрической машины будет функцией частоты и не зависит от нагрузки. Для всех видов зависимости момента от скорости: Мс ≡ 1/f, Мс = const, Mc ≡ f и Mc ≡ f2. КПД двигателя при каждой заданной скорости будет примерно одинаков.
Для выявления поведения асинхронного электродвигателя при регулировании частоты питающего напряжения в случаях различной зависимости статического момента от скорости необходимо установить характер изменения пускового и критического моментов.
В основу рассмотрения легла эквивалентная схема асинхронной машины с намагничивающим контуром, вынесенным на зажимы машины. Влияние насыщения не учитывается. За исходные данные принимаем параметры машины при номинальном напряжении и частоте fном = 50 Гц. В качестве независимой переменной (определяющего параметра) удобно принять частоту, выраженную в относительных единицах:
Напряжение, приложенное к зажимам электрической машины, будет функцией частоты и одновременно, будет зависеть от характера изменения статического момента, и в общем случае будет иметь вид:
Показатель степени α зависит от желаемого характера Мдв и функции скорости. При построении механической характеристики асинхронной машины при любой f можно использовать общее выражение:
При построении механической характеристики асинхронной машины при любой f можно использовать общее выражение:
Индуктивное сопротивление обмоток можно выразить при f = 50 Гц, а именно:
Где х1н и х2н/ — индуктивные сопротивления статора и ротора, приведенные к обмотке статора, при f = 50 Гц.
После введения относительных единиц выражение примет вид:
Где φ – частота в относительных единицах; α – коэффициент, определяемый характером зависимости момента от скорости электрической машины.
В (8) при переходе к относительным единицам U2 превращается в U2нφ2α, однако за счет f, входящей в выражение синхронной скорости ω0 = 2πfнφ, показатель степени у
φ становится 2α — 1.
Величина критического момента станет равна:
В случае пренебрежения активным сопротивлением статорной обмотки:
Выражение (10) может быть представлено как:
Где Мкн – критический момент электрической машины при номинальном напряжении и f.
Критическое скольжение при переменной частоте:
В ряде случаев удобно воспользоваться выражением механической характеристики, содержащим значение критического момента:
Если пренебречь сопротивлением активным обмотки статора уравнение механической характеристики примет вид:
Подставляя в упрощенное выражение механической характеристики значения Мк и sк без учета r1 получим расчетную формулу:
На рисунке ниже приведены механические характеристики асинхронного электродвигателя для трех различных частот в относительных единицах для случая изменения f по закону (U/f) = const или α = 1.
Сравнение характеристик показывает, что критическое скольжение возрастает с понижением частоты. Это связано с изменением соотношения активного и индуктивного сопротивления. При уменьшении f критический момент в двигательном режиме уменьшается. Выражение для пускового момента равно:
Пусковой момент при небольших изменениях частоты несколько увеличивается, а затем, при дальнейшем уменьшении f, достигает максимума, а дальше падает. Понижение М, наблюдаемое при низких f, вызывается относительным увеличением активного сопротивления, а также уменьшением магнитного потока, влияние которого не учитывают приведенные выше формулы. Уменьшение потока обуславливается падением напряжения в обмотке статора и является функцией нагрузки электродвигателя. Уменьшение магнитного потока может быть устранено с помощью увеличения отношения U/f при малых значениях частоты. Увеличение отношения U/f в размере, необходимом для поддержания номинального значения магнитного потока при нагрузке, приведет к тому, что при малых нагрузках машина окажется перевозбужденной и, следовательно, возрастет намагничивающий ток.
Понижение М, наблюдаемое при низких f, вызывается относительным увеличением активного сопротивления, а также уменьшением магнитного потока, влияние которого не учитывают приведенные выше формулы. Уменьшение потока обуславливается падением напряжения в обмотке статора и является функцией нагрузки электродвигателя. Уменьшение магнитного потока может быть устранено с помощью увеличения отношения U/f при малых значениях частоты. Увеличение отношения U/f в размере, необходимом для поддержания номинального значения магнитного потока при нагрузке, приведет к тому, что при малых нагрузках машина окажется перевозбужденной и, следовательно, возрастет намагничивающий ток.
Механическая характеристика асинхронного двигателя для случая α = 1/2 , то есть при изменении напряжения по закону показаны ниже:
Регулирование скорости асинхронных короткозамкнутых машин в настоящее время применяется для самого широкого спектра рабочих механизмов. В высоко оборотистых электроприводах, где скорость вращения вала равна или превышает 3000 об/мин, применение коллекторных электромашин крайне нежелательно. Здесь больше подходит частотно-регулируемый асинхронный электропривод. Часто данный способ регулирования применяется при необходимости одновременного изменения скорости по одному закону нескольких рабочих органов машины, приводимых в движение отдельными электродвигателями. Примерами таких установок могут послужить электроприводы центрифуг вискозной промышленности, применяемые для получения вискозного волокна, рогулечных прядильных машин текстильной промышленности, роликовых транспортеров прокатных цехов металлургических заводов, служащих для транспортировки как горячего, так и холодного металла в процессе прокатки. Во всех перечисленных случаях каждый отдельный элемент рабочей машины (отдельная центрифуга, рогулька прядильной машины, ролик транспортера и так далее) приводятся в движение отдельным асинхронным двигателем мощностью от нескольких десятков ватт, до киловатт, и целая группа подобных двигателей может питаться от одного преобразователя с регулируемой частотой.
Здесь больше подходит частотно-регулируемый асинхронный электропривод. Часто данный способ регулирования применяется при необходимости одновременного изменения скорости по одному закону нескольких рабочих органов машины, приводимых в движение отдельными электродвигателями. Примерами таких установок могут послужить электроприводы центрифуг вискозной промышленности, применяемые для получения вискозного волокна, рогулечных прядильных машин текстильной промышленности, роликовых транспортеров прокатных цехов металлургических заводов, служащих для транспортировки как горячего, так и холодного металла в процессе прокатки. Во всех перечисленных случаях каждый отдельный элемент рабочей машины (отдельная центрифуга, рогулька прядильной машины, ролик транспортера и так далее) приводятся в движение отдельным асинхронным двигателем мощностью от нескольких десятков ватт, до киловатт, и целая группа подобных двигателей может питаться от одного преобразователя с регулируемой частотой.
В качестве источника регулируемых асинхронных электродвигателей могут быть использованы следующие типы преобразователей частоты:
- Синхронный генератор, вращающийся с переменной частотой.

- Асинхронный преобразователь частоты.
- Преобразователь типа Леблана.
- Коллекторные генераторы переменного тока с возбуждением со статора.
- Полупроводниковые преобразователи частоты.
В таблице ниже представлены сопоставления технических показателей каждого типа перечисленных преобразователей:
Таблица выше показывает, что все системы машинных преобразователей, за исключением преобразователя Леблана, состоят из значительного количества электрических машин и обладают невысоким общим коэффициентом полезного действия и высокой первоначальной стоимостью. Преобразователь частоты Леблана свободен от указанных недостатков, однако, несовершенство коммутации ограничило возможности его широкого использования в недалеком прошлом. Современная электроника вывела на первое место полупроводниковые преобразователи частоты равных которым пока нет, и которые используются практически во всех частотно-регулируемых электроприводах.
Технология двигателей и регуляторов скорости
За последние 150 лет разработка электродвигателей шла урывками. Изначально все электродвигатели использовали постоянный ток (DC). Но с появлением переменного тока (AC) и в разгар «битвы токов» между гигантами промышленного развития Джорджем Вестингаузом и Томасом Эдисоном Никола Тесла представил свой асинхронный двигатель, новую конструкцию, которая преобразовывала мощность переменного электрического тока в крутящий момент. .
Изначально все электродвигатели использовали постоянный ток (DC). Но с появлением переменного тока (AC) и в разгар «битвы токов» между гигантами промышленного развития Джорджем Вестингаузом и Томасом Эдисоном Никола Тесла представил свой асинхронный двигатель, новую конструкцию, которая преобразовывала мощность переменного электрического тока в крутящий момент. .
Это изменило правила игры. Помимо того, что он помог Westinghouse выиграть битву с токами, он был относительно прост в изготовлении, эффективен и, что особенно важно, не нуждался в контактных кольцах или щетках для передачи электрического тока на вал. Эти детали были ахиллесовой пятой двигателей постоянного тока и двигателей переменного тока с контактными кольцами и требовали регулярного обслуживания для их замены по мере износа.
Вместо этого вихревые токи и связанное с ними магнитное поле индуцировались в пакете стальных пластин, прикрепленных к валу, благодаря новой схеме распределенной обмотки, встроенной в статор, с использованием вращающегося магнитного поля, создаваемого переменным током. Магнитное поле статора взаимодействовало с наведенным магнитным полем ротора, вращая его почти с той же скоростью, но не совсем с той же скоростью. Создан асинхронный двигатель переменного тока. Сочетание высокого пускового крутящего момента и низких эксплуатационных расходов позволило быстро адаптировать его для приложений, которые ранее были областью пара, воды, ремней/шкивов и лошадиных сил. Реактивный двигатель, использующий магниты, встроенные в ротор, также был изобретен в 19 веке.век. Ему мешал низкий КПД при прямом питании от сети переменного тока. Это изменится в конце 20 века.
Магнитное поле статора взаимодействовало с наведенным магнитным полем ротора, вращая его почти с той же скоростью, но не совсем с той же скоростью. Создан асинхронный двигатель переменного тока. Сочетание высокого пускового крутящего момента и низких эксплуатационных расходов позволило быстро адаптировать его для приложений, которые ранее были областью пара, воды, ремней/шкивов и лошадиных сил. Реактивный двигатель, использующий магниты, встроенные в ротор, также был изобретен в 19 веке.век. Ему мешал низкий КПД при прямом питании от сети переменного тока. Это изменится в конце 20 века.
1970-е и 1980-е
Прошло почти столетие, и асинхронный двигатель, универсальный в своем применении в насосах, вентиляторах, воздуходувках, станках, смесителях и других устройствах, воспринимался как должное. Производители усовершенствовали методы производства, чтобы снизить затраты, иногда за счет эффективности. Единственным его постоянным недостатком было то, что он работал со скоростью, определяемой количеством магнитных полюсов в обмотке и частотой переменного тока. Эту скорость нельзя было изменить, кроме как путем создания сложной обмотки статора с двумя и четырьмя или четырьмя и шестью полюсами, встроенными в нее.
Эту скорость нельзя было изменить, кроме как путем создания сложной обмотки статора с двумя и четырьмя или четырьмя и шестью полюсами, встроенными в нее.
Некоторые пользователи предприятий преодолели эту проблему, используя вихретоковые и гидродинамические муфты, установленные между двигателем и приводимой машиной, чтобы регулировать выходную скорость вниз и вверх в соответствии с непосредственными требованиями. Однако эти муфты были дорогими и громоздкими. На насосах они добавили размер, сложность и дополнительное обслуживание. Ремни и шкивы разного диаметра можно использовать для постоянной работы насоса с разной скоростью — выше или ниже скорости двигателя — в зависимости от непрерывного применения.
Приводы с регулируемой скоростью
Изобретение и массовое производство электронных приводов с регулируемой скоростью (ЧРП) началось в 1960-х и 1970-х годах. Промышленные пионеры разработали несколько методов преобразования сетевого электропитания с его постоянной частотой (50 или 60 герц [Гц], в зависимости от географии) в переменную частоту на выходе, в результате чего асинхронный двигатель с регулируемой скоростью приводит в движение насос или вентилятор. При наличии подходящей системы управления скорость установки можно регулировать в соответствии с переменной нагрузкой.
При наличии подходящей системы управления скорость установки можно регулировать в соответствии с переменной нагрузкой.
Первое поколение частотно-регулируемых приводов было дорогим, большим и ненадежным. Они регулярно спотыкались, чтобы защитить себя. В ответ операторы часто требовали, чтобы на случай отказа была спроектирована система байпаса ЧРП к двигателю. Это делало их еще более дорогими, громоздкими и сложными. Тридцать лет спустя частотно-регулируемые приводы стали меньше по размеру, доступны по цене и надежны. Уменьшение размера позволило их децентрализовать и установить локально.
OEM-производители насосов сделали шаг вперед в 1990-х годов и интегрировали их в свои продукты, а с тех пор добавили самонастраивающиеся интеллектуальные контроллеры скорости и возможность подключения к Интернету. Это упрощает проектирование и установку гидравлических систем, а также обеспечивает более надежные результаты. Возможности контроллеров насосов часто включают в себя точное измерение расхода и напора, создаваемого насосом, — информацию, которая может помочь повысить эффективность процесса. Преимущество этих улучшений также заключалось в удалении байпасов, которые стали излишними, так же как пусковая ручка стала для автомобилей и автомобилей после появления электрических самозапускающих устройств.
Преимущество этих улучшений также заключалось в удалении байпасов, которые стали излишними, так же как пусковая ручка стала для автомобилей и автомобилей после появления электрических самозапускающих устройств.
Потенциальные побочные эффекты частотно-регулируемых приводов, такие как гармонические помехи в сети электроснабжения и электрические токи, генерируемые асинхронными двигателями и проходящие через подшипники их валов, во многих отраслях до сих пор полностью не изучены, что приводит к чрезмерному проектированию и нерациональному расходованию материалов. и деньги.
Двигатели Начиная с 1980-х годов
Переход на более эффективные двигатели начался в 1980-х годах. Используя более активные материалы и более жесткие производственные допуски, их продукты с более высокой эффективностью создали новый рынок и побудили регулирующие органы создать стандарты, которые отличали бы новое от старого. Сегодняшние рейтинги Национальной ассоциации производителей электрооборудования (NEMA) и Международного рейтинга эффективности (IE) являются результатом этой инициативы. Но улучшения, выходящие за рамки IE3 и NEMA Premium, требовали технологии двигателя, которая не требовала бы индукции токов в роторе для создания магнитного поля ротора. Эра двигателей с постоянными магнитами не за горами. Вопрос был в том, в каком направлении она пойдет?
Но улучшения, выходящие за рамки IE3 и NEMA Premium, требовали технологии двигателя, которая не требовала бы индукции токов в роторе для создания магнитного поля ротора. Эра двигателей с постоянными магнитами не за горами. Вопрос был в том, в каком направлении она пойдет?
Двигатели с постоянными магнитами — для поверхностного и внутреннего монтажа
В роторах двигателей, оснащенных постоянными магнитами, обмотка статора больше не должна расходовать энергию, индуцирующую в ней магнетизм. Но как лучше всего расположить магниты внутри или на роторе? Как следует из их названий, двигатели с поверхностными постоянными магнитами (SPM) имеют магниты на поверхности ротора, а двигатели с внутренними постоянными магнитами (IPM) имеют встроенные внутри ротора формы, соответствующие применению привода.
Двигатели SPM обеспечивают хороший пусковой момент, но расположение магнитов создает противо-ЭДС в статоре на скорости, снижая эффективность. Двигатели SPM ограничены по скорости из-за механического ограничения крепления магнитов к валу.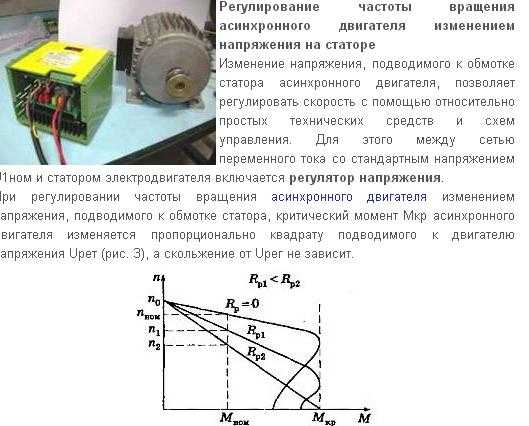 Однако это не относится к низкой скорости центробежных насосов по сравнению с теми, которые требуются для автомобильных применений.
Однако это не относится к низкой скорости центробежных насосов по сравнению с теми, которые требуются для автомобильных применений.
Двигатель IPM, встроенный в ротор, позволяет оптимально сконфигурировать форму магнитов, чтобы линии магнитного потока уменьшали противо-ЭДС на высоких скоростях. Кроме того, механические ограничения скорости не применяются, как для SPM.
Реактивные двигатели — синхронные реактивные двигатели
Реактивный двигатель имеет пустые пазы специальной формы в роторе. Если поле статора правильно выровнено по пазам, ротор будет вращаться в состоянии низкого сопротивления, создавая момент сопротивления. Этот тип двигателя недорог, надежен, создает высокий крутящий момент и устойчив к перебоям в подаче питания и перегрузкам. Недостатком является то, что он имеет высокую пульсацию крутящего момента: колебания крутящего момента возникают, когда магниты реагируют с обмотками статора под определенными углами во время вращения.
Реактивные двигатели — вентильные реактивные двигатели
Этот тип двигателя недорог, эффективен, надежен, создает высокий крутящий момент и устойчив к перебоям в питании и перегрузкам. Недостатком является то, что он также имеет высокие пульсации крутящего момента и производит больше шума и вибрации.
Двигатель SYN RM IPM
При размещении PM в пазах синхронного реактивного двигателя получается двигатель IPM Syn RM. Он не создает противоЭДС, когда на скорости ротор выровнен с полем статора под одним углом, а при запуске — под другим углом, что создает высокий крутящий момент. Еще одним преимуществом является то, что вал двигателя работает без нагрева, что увеличивает срок службы подшипников. Двигатель SYN RM IPM использует как реактивный момент, так и магнитный момент, управляя их взаимодополняющими свойствами, чтобы обеспечить высокий крутящий момент при запуске с высокой эффективностью и плавной работой на скорости.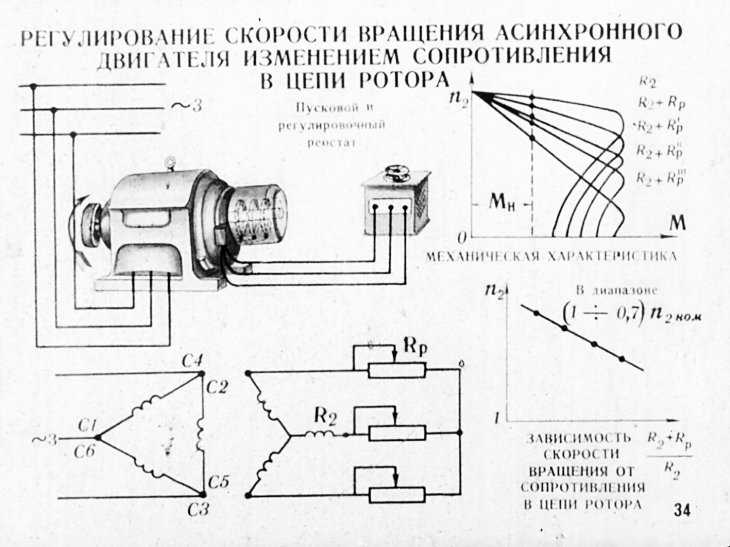 Кроме того, улучшается коэффициент мощности. Кроме того, для этого типа требуется меньше магнитного материала, чем для обычного двигателя IPM.
Кроме того, улучшается коэффициент мощности. Кроме того, для этого типа требуется меньше магнитного материала, чем для обычного двигателя IPM.
Регулирование частоты асинхронного двигателя
Регулирование частоты асинхронного двигателя – Синхронная скорость, поэтому скорость двигателя можно регулировать, изменяя частоту питания. Напряжение, индуцируемое в статоре, пропорционально произведению частоты питания и потока в воздушном зазоре. Если пренебречь падением напряжения в статоре, напряжение на клеммах можно считать пропорциональным произведению частоты и магнитного потока.
Любое снижение частоты питания без изменения напряжения на клеммах вызывает увеличение потока в воздушном зазоре. Асинхронные двигатели предназначены для работы в точке перегиба характеристики намагничивания, чтобы в полной мере использовать магнитный материал. Следовательно, увеличение потока приведет к насыщению двигателя. Это приведет к увеличению тока намагничивания, искажению линейного тока и напряжения, увеличению потерь в сердечнике и медных потерях статора, а также к возникновению высокочастотного акустического шума.
, где K — константа, а L s и L′ r — соответственно индуктивности статора и ротора относительно статора. Положительный знак соответствует двигательному режиму, отрицательный — тормозному режиму.
Когда частота не мала, (R s /f) ≪ 2π(L s + L′ r ) и, следовательно, из (6.69)
Уравнение (6.70) предполагает, что при (V/f), двигатель развивает постоянный максимальный крутящий момент, за исключением низких скоростей (или частот).
Когда либо V достигает насыщения, либо достигает номинального значения при базовой скорости, его нельзя увеличивать с частотой. Следовательно, при скорости выше базовой частота изменяется при постоянном значении V. Согласно уравнению (6.70), при постоянном V максимальный крутящий момент уменьшается с увеличением частоты (или скорости).
Согласно уравнению (6.70), при постоянном V максимальный крутящий момент уменьшается с увеличением частоты (или скорости).
Таким образом, изменение напряжения на клеммах в зависимости от частоты показано на рис. 6.33(a). V поддерживается постоянным выше базовой скорости. Ниже базовой скорости отношение (V/f) поддерживается постоянным, за исключением низких частот, где отношение (V/f) увеличивается для поддержания постоянного максимального крутящего момента. Соответствующие кривые крутящего момента показаны на рис. 6.33(b) как для моторного режима, так и для режима торможения. Кривые показывают, что управление скоростью и операция торможения доступны от скорости, близкой к нулевой, до скорости, превышающей синхронную.
Заданный крутящий момент достигается при более низком токе, когда работа на любой частоте ограничена между синхронной скоростью и точкой максимального крутящего момента, как для двигателя, так и для торможения. Следовательно, работа двигателя для каждой частоты ограничена между синхронной скоростью и точкой максимального крутящего момента, как показано сплошными линиями на рис. 6.33(b).
6.33(b).
Регулятор частоты асинхронного двигателя обеспечивает хорошие рабочие и переходные характеристики благодаря следующим характеристикам:
- Управление скоростью и торможение доступны от нулевой скорости до скорости выше базовой.
- Во время переходных процессов (пуск, торможение и реверсирование скорости) работа может выполняться при максимальном крутящем моменте с уменьшенным током, обеспечивающим хорошие динамические характеристики.
- Потери в меди низкие, а КПД и коэффициент мощности высокие, поскольку работа ограничена между синхронной скоростью и точкой максимального крутящего момента на всех частотах.
- Падение скорости от холостого хода до полной нагрузки небольшое.
Наиболее важным преимуществом частотно-регулируемого привода асинхронного двигателя является то, что он позволяет получить привод с регулируемой скоростью с вышеупомянутыми хорошими рабочими и переходными характеристиками от асинхронного двигателя с короткозамкнутым ротором. Двигатель с короткозамкнутым ротором имеет ряд преимуществ перед двигателем постоянного тока. Он дешевый, прочный, надежный и долговечный. Благодаря отсутствию коллектора и щеток он практически не требует обслуживания, может эксплуатироваться во взрывоопасной и загрязненной среде, может быть рассчитан на более высокие скорости, напряжение и мощность. Он также имеет меньшую инерцию, объем и вес. Хотя стоимость двигателя с короткозамкнутым ротором намного ниже по сравнению со стоимостью двигателя постоянного тока того же номинала, общая стоимость приводов с асинхронным двигателем с регулируемой частотой в целом выше. Но из-за преимуществ, перечисленных выше, приводы с асинхронными двигателями с переменной частотой предпочтительнее приводов с двигателями постоянного тока для большинства применений. В специальных применениях, требующих необслуживаемой эксплуатации, таких как подземные и подводные установки, а также во взрывоопасных и загрязненных средах, таких как шахты и химическая промышленность, приводы с асинхронными двигателями с регулируемой частотой являются естественным выбором.
Двигатель с короткозамкнутым ротором имеет ряд преимуществ перед двигателем постоянного тока. Он дешевый, прочный, надежный и долговечный. Благодаря отсутствию коллектора и щеток он практически не требует обслуживания, может эксплуатироваться во взрывоопасной и загрязненной среде, может быть рассчитан на более высокие скорости, напряжение и мощность. Он также имеет меньшую инерцию, объем и вес. Хотя стоимость двигателя с короткозамкнутым ротором намного ниже по сравнению со стоимостью двигателя постоянного тока того же номинала, общая стоимость приводов с асинхронным двигателем с регулируемой частотой в целом выше. Но из-за преимуществ, перечисленных выше, приводы с асинхронными двигателями с переменной частотой предпочтительнее приводов с двигателями постоянного тока для большинства применений. В специальных применениях, требующих необслуживаемой эксплуатации, таких как подземные и подводные установки, а также во взрывоопасных и загрязненных средах, таких как шахты и химическая промышленность, приводы с асинхронными двигателями с регулируемой частотой являются естественным выбором.
Блок-схема схемы частотно-регулируемого привода асинхронного двигателя показана на рис. 6.34. Двигатель питается от источника переменного напряжения переменной частоты (VFVS). V* и f* — команды напряжения и частоты для VFVS. Блок управления потоком выдает команду напряжения V* для VFVS, чтобы поддерживать взаимосвязь рис. 6.33(a) между V* и f*. Опорная частота f* изменяется на скорость управления. Цепь задержки введена между f* и fr, так что даже когда ft изменяется на большую величину, f* будет изменяться только медленно, так что скорость двигателя может отслеживать изменения ft, тем самым ограничивая работу двигателя для каждой частоты между синхронной скоростью и точка максимального крутящего момента. VFVS может быть инвертором источника напряжения или циклопреобразователем.
Контроль скорости скольжения:
Пусть V и f обозначают номинальное напряжение и частоту машины. Когда двигатель работает на скорости ниже базовой при постоянном управлении (V/f), для частоты kf напряжение на клеммах будет равно кВ, где k — коэффициент, такой, что 0 ≤ k ≤ 1. Таким образом, поскольку частота изменяется от 0 до f, k изменяется от 0 до 1, а напряжение изменяется от 0 до В.
Подставляя напряжение кВ и частоту kf и пренебрегая падением сопротивления статора, из уравнений (6.4) и (6.10)
В уравнениях. (6.71) и (6.72) если (ks) поддерживать постоянным при изменении k, то ток ротора I′ r и крутящий момент T останутся постоянными. Так как скольжение мало, то I′ r будет в фазе с напряжением. Так как поток постоянный I m также будет постоянным. Теперь
Таким образом, если двигатель работает при постоянном значении ks при изменении частоты, то двигатель будет работать при постоянном токе и крутящем моменте. Давайте рассмотрим значение кс.
Давайте рассмотрим значение кс.
На частоте kf
Примечание ω st – скорость скольжения, представляющая собой разность скорости вращающегося поля kω мс и скорости ротора ω м . Это также падение скорости двигателя по сравнению со скоростью без нагрузки, когда машина загружена.
Приведенное выше обсуждение показывает. что для любого значения T падение скорости двигателя по сравнению с его скоростью без нагрузки (kω мс ) одинаково для всех частот. Следовательно, характеристики крутящего момента скорости машины для 0 < s < s м — примерно параллельные кривые.
Работа машины с постоянной скоростью скольжения также подразумевает работу с постоянной частотой ротора, как показано ниже
, где f r и ω r — частота ротора в Гц и рад/сек соответственно.
Для s < s m , (R′ r /sk) >> (X s + X′ r ), отсюда из уравнений. (6.72) и (6.73)
(6.72) и (6.73)
Ур. (6.76) предполагает, что при s < s м кривые скорости и крутящего момента представляют собой почти прямые линии. Поскольку они также параллельны, кривые скорость-момент представляют собой приблизительно параллельные прямые линии для s < s м .
Согласно приведенному выше обсуждению, для скорости скольжения ток и крутящий момент двигателя имеют одинаковые значения на всех частотах. Таким образом, током и крутящим моментом двигателя можно управлять, контролируя скорость скольжения. Кроме того, ток двигателя можно ограничить безопасным пределом, ограничив скорость скольжения. Это поведение используется в управлении скоростью с обратной связью для ограничения тока в допустимых пределах.
Теперь рассмотрим работу на скорости выше базовой. Как указывалось ранее, машина работает при постоянном напряжении V. Теперь
Поскольку частота выше номинальной k > 1. Поскольку работа снова ограничена между синхронной скоростью и максимальным крутящим моментом, скольжение имеет небольшое значение, следовательно,
Таким образом, для скоростей, превышающих базовую скорость, при данном I′ r и, следовательно, приблизительно при заданном I s скорость скольжения ω sl линейно увеличивается с k (или частотой). Это поведение используется в управлении скоростью с обратной связью для ограничения тока в пределах допустимого значения выше базовой скорости.
Это поведение используется в управлении скоростью с обратной связью для ограничения тока в пределах допустимого значения выше базовой скорости.
Поскольку проскальзывание мало, I′ r находится в фазе с V. Если пренебречь потерями в меди машины, развиваемая мощность P м определяется как
Следовательно, P м постоянна для данного I’ r и, следовательно, для данного I s . Таким образом, привод работает в режиме постоянной мощности.
Ограничения крутящего момента и мощности, а также режимы работы:Изменения крутящего момента и мощности для заданного тока статора и для частот ниже и выше номинальной частоты показаны точками на рис. 6.35. Когда ток статора имеет максимально допустимое значение, они представляют максимальный крутящий момент и мощность двигателя при частотно-регулируемом приводе асинхронного двигателя.
Изменение максимального крутящего момента и мощности в зависимости от частоты показано на рис. 6.36. Изменение скорости скольжения ω sl с частотой также показаны на этом рисунке.
6.36. Изменение скорости скольжения ω sl с частотой также показаны на этом рисунке.
Как видно на рис. 6.35 и 6.36 двигатель имеет постоянный максимальный крутящий момент от нуля до базовой скорости ω 