
Правда о пяти мифах частотно-регулируемого привода / Статьи и обзоры / Элек.ру
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.

Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя с фазами 3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов (IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.
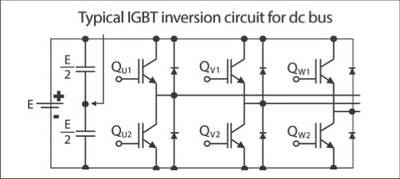
Рис. 2. Схема инвертора с
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.
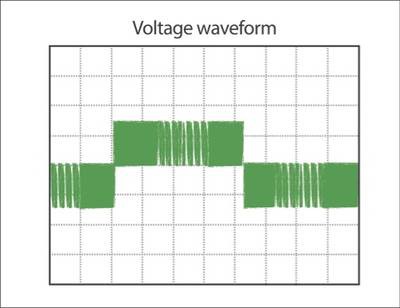
Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента, когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).
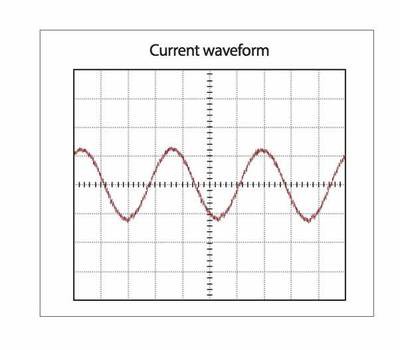
Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются прежними.
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).

Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.
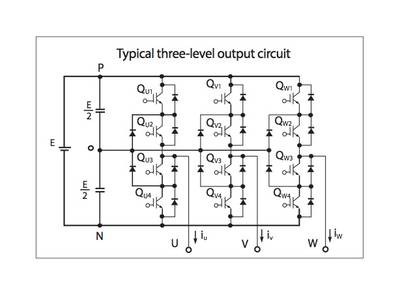
Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую сеть.
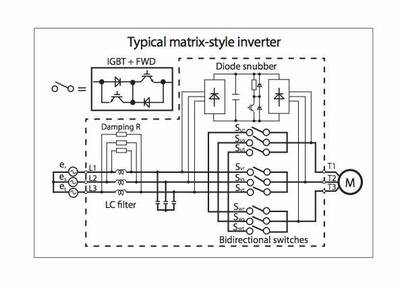
Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Миф № 3: Частотный преобразователь компенсирует коэффициентом мощности.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
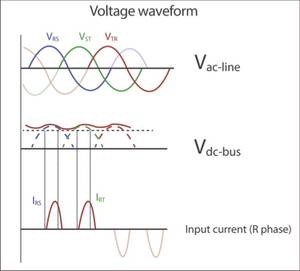
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:
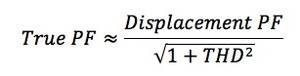
где THD = суммарное гармоническое искажение
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так, например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).

Рис. 9. График зависимости напряжения от частоты
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).
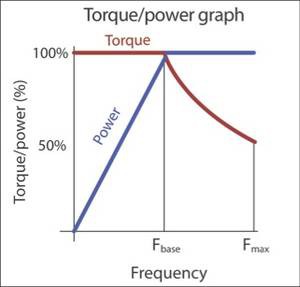
Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность, а не ток, который следует учитывать:
Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который, как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у ООО «КоСПа».
Или в соответствующем разделе преобразователя YASKAWA.
Оригинал статьи: www.yaskawa.com.
Источник: Chastotnik.pro, Пол Эйвери, Yaskawa America Inc.
Правда о пяти мифах частотно регулируемого привода.
Знание принципов работы частотно регулируемого привода (ЧРП) может упростить процесс выбора преобразователя частоты.
Автор: Пол Эйвери, Yaskawa America Inc.
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.

Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя с фазами 3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов (IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.

Рис. 2. Схема инвертора с IGBT транзисторами.
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.

Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента, когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).

Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются прежними.
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).

Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.

Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую сеть.

Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Миф № 3: Частотный преобразователь компенсирует коэффициентом мощности.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).

Рис. 7. Форма сигналов после выпрямителя
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:

где THD = суммарное гармоническое искажение
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так, например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).

Рис. 9. График зависимости напряжения от частоты.
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).

Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты.
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность, а не ток, который следует учитывать:

Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который, как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у нашего партнера — ООО «КоСПа»
Или в соответствующем разделе преобразователя YASKAWA
Оригинал статьи: https://www.yaskawa.com/about-us/media-center/industry-articles-display?articleId=2167778
27.07.2017
Теория и практика удаленного управления частотно-регулируемым приводом
Преобразователи частоты для асинхронных двигателей, инверторы для асинхронных двигателей, частотно-регулируемые приводы (ЧРП) — все это названия устройств, предназначенных для плавного управления скоростью вращения асинхронного электродвигателя за счет преобразования входного напряжения (220 или 380 Вольт) в импульсное выходное с заданной частотой (от 0 до 300…600 Гц).
Частотные преобразователи обеспечивают плавный пуск и торможение электродвигателя, позволяют менять направление вращения. Важными преимуществами применения ЧРП являются экономия электроэнергии в случае переменной нагрузки электродвигателя, использование встроенного ПИД-регулятора ЧРП и возможность удаленной диагностики и управления по промышленной сети, о чем и пойдет речь ниже.
Большинство частотных преобразователей имеют встроенный интерфейс передачи данных RS485 с протоколом Modbus, на других ЧРП существует возможность установки карты расширения с указанным интерфейсом. При работе с ЧРП по промышленной сети возможно использовать две реализации протокола Modbus — ASCII и RTU.
Вариант RTU обеспечивает более высокую скорость передачи данных и чаще применяется для соединения с ЧРП. Сеть строится на основе модели клиент-сервер или ведущий-ведомый. Ведущий отправляет запросы и может быть только один в сети, ведомые устройства обрабатывают свои запросы и посылают в сеть ответ на запрос. Количество ведомых устройств в сети может достигать 31. Каждый ведомый имеет свой уникальный адрес, ведущий же не адресуется. Скорости передачи данных варьируются от 62,5 Кбит/с до 10 Мбит/с, а длина сегмента сети может составлять до 1200 метров.
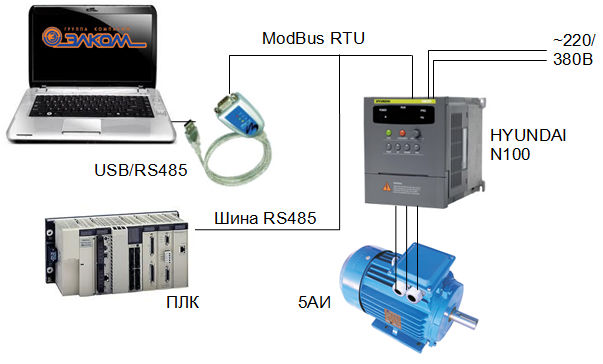
Рис.1. Управление частотным преобразователем электродвигателя по промышленной сети RS485 Modbus RTU
Частотный преобразователь может быть только ведомым устройством, ведущим же, чаще всего выступает программируемый логический контроллер (ПЛК) или персональный компьютер (ПК). Некоторые ЧРП поддерживают возможность широковещательной команды, позволяющей ведущему устройству обращаться ко всем ведомым в сети. Часто скорость передачи данных в конкретном ЧРП фиксирована и составляет 9600 бит/с, количество бит данных – 8, без контроля четности. Эти настройки являются стандартными для большинства устройств.
Кадр запроса ведущего представляет собой набор данных, включающий в себя адрес ЧПР, код функции Modbus, адреса регистров, к которым идет обращение, данные и в конце 2 байта контрольной суммы, рассчитывающейся по алгоритму CRC-16 (для Modbus RTU). Частотный преобразователь с указанным адресом получает и обрабатывает запрос, формирует кадр ответа и отправляет обратно ведущему устройству сети. Кадр ответа содержит адрес ответившего устройства, номер функции Modbus, набор данных и контрольную сумму кадра.
Из набора стандартных функций протокола Modbus, зачастую ЧРП предоставляет возможность использования функций: 8(08H) — контроль связи, 3(03H) — чтение значений нескольких регистров хранения, 6(06H) — запись значения в один регистр хранения или 16(10H) — запись значений в несколько регистров хранения. Максимальное чтение или запись значений регистров единовременно по функциям 3(03H) и 16(10H) составляет 16 регистров хранения.
В случае управления и диагностики частотно-регулируемым приводом от ПЛК выгоднее использовать передачу сигналов по шине RS485, нежели дискретными и аналоговыми сигналами. Построение связи нескольких ЧРП с ПЛК позволяет существенно сэкономить как на проводах и кабелях, ведь для передачи данных по промышленной сети используется витая пара, так и на аппаратных ресурсах ПЛК — нет необходимости в дополнительных аналоговых и дискретных входах/выходах.
Стандартными настройками ЧРП в таком случае является изменение параметров источников частоты и пуска на последовательный интерфейс, установка адреса в сети, скорости передачи данных и параметров кадра. ПЛК посылает команды установки частоты, пуска, реверса, останова. Могут быть изменены настройки параметров ускорения и замедления и т.д. ПЛК производит мониторинг выходной частоты, сообщений об ошибках. При использовании контроллера в системах с необходимостью поддержания заданной частоты вращения асинхронного электродвигателя обычно ПИД-регулирование осуществляется силами контроллера, который посылает запрос ЧРП по сети на изменение частоты.
При работе с частотно-регулируемым приводом по сети RS485 от ПК, задача часто сводятся к диагностике ЧРП, мониторинге выходных параметров, считывании и изменении настроек частотного преобразователя. Удобство заключается в удаленном изменении параметров ПИД-регулирования, настроек, отвечающих за параметры мотора, считывании последних ошибок, мониторинге потребляемой мощности, выходной частоты, напряжения, тока, количества моточасов и прочее.
Для подключения ЧРП к ПК по сети RS485 требуется преобразователь интерфейсов RS485/USB или RS485/RS232(при наличии COM порта с интерфейсом RS232 на вашем ПК). При использовании преобразователя интерфейсов, подключаемого к порту USB, необходимо установить драйвер виртуального COM порта в операционной системе.
Управление и диагностика ЧРП с персонального компьютера требует наличия специального программного обеспечения. Часто для опроса преобразователя частоты с ПК используют OPC-сервера. При работе с ОРС-сервером необходимо указать адреса регистров для опроса с ПК, период опроса, необходимо знать размерность получаемых значений параметров.
Инженерами одной торговой компании были созданы программные продукты для удобства пользователей управлять, осуществлять мониторинг, настройку и считывание параметров частотно-регулируемых приводов HYUNDAI и ESQ. Программы работают под операционной системой Windows с установленной платформой. NET Framework 4. Программы не требуют установки, имеют русскоязычный интерфейс, размер исполнительного файла — несколько сотен Кбайт.
Назначение программного обеспечения серии MB (например, для частотного преобразователя HYUNDAI N700E программный продукт MB-n700E.exe) — конфигурирование основных настроек ЧРП, управление приводом в различных режимах работы, мониторинг основных параметров работающего ЧРП, считывание всех параметров, запись их в файл и изменение необходимых настроек.
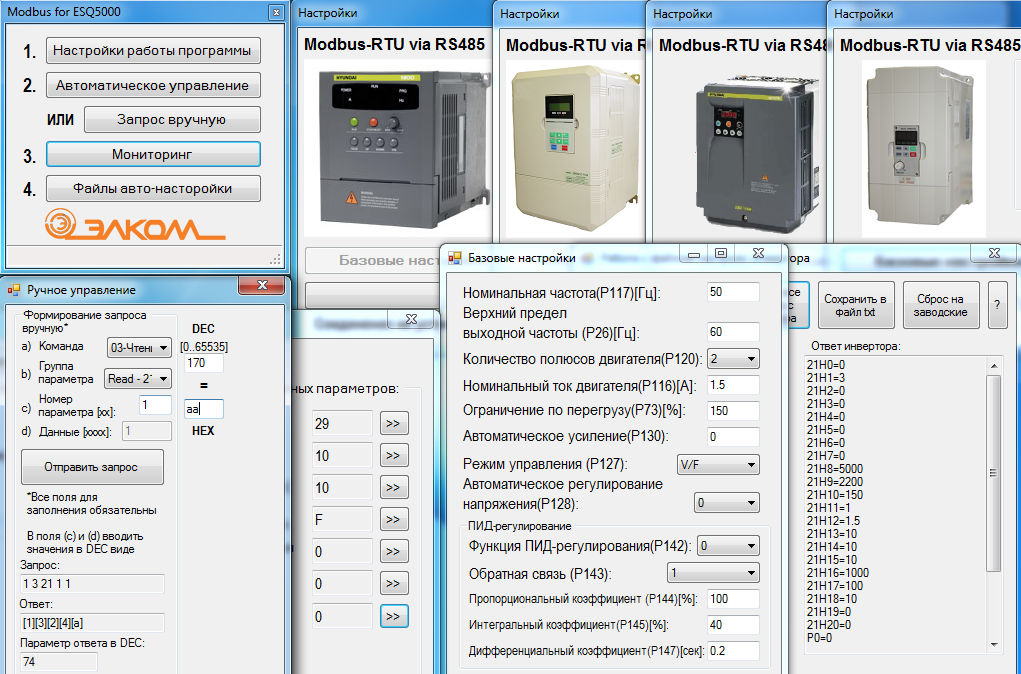
Рис. 2. Программное обеспечение MB «Элком»
Программный продукт ElcTestMBrtu.exe предназначен для автоматического поиска подключенного частотного преобразователя к ПК. Программа перебирает все возможные настройки соединения автоматически, кроме этого позволяет пользователю в ручном режиме конфигурировать параметры связи и отправлять запросы ЧРП. Поддерживаемые функции Modbus — 3, 6, 8, 16. Формат ввода данных — десятичный.
Программы управления и диагностики частотно-регулируемых приводов HYUNDAI и ESQ с руководствами по использованию доступны для свободного скачивания на сайте компании.
При необходимости программы могут быть доработаны под конкретные нужды заказчика. Программы загружаются на сайт по мере разработки, дополнения и усовершенствования.
Технический специалист ООО «Элком» Жиров Михаил
Частотно регулируемый привод
01.06.2017
Тематика: Полезная информацияОбщие сведения
Частотно регулируемым приводом (ЧРП) называют агрегат, осуществляющий бесступенчатое регулирование скорости вращения ротора электродвигателя, путем изменения частоты питающего напряжения. ЧРП включает в себя электродвигатель и преобразователь частоты (ПЧ).
Частотный электропривод используется во многих сферах нашей жизни. Управление электродвигателями, построенное на этом принципе, лежит в основе самых разнообразных устройств, начиная с бытовой техники (стиральные машины, пылесосы), заканчивая крупными технологическими комплексами различных отраслей промышленности.
Компания Овердрайв-Электро предлагает частотоно регулируемые приводы ABB со склада в Минске:
Устройство и принцип действия
Принцип, на основе которого функционирует частотный привод, использует базовое свойство вращающихся электрических машин, выраженное зависимостью параметров электромагнитного поля статора от частоты напряжения. Так, угловая скорость электромагнитного поля статора асинхронного двигателя выражается формулой:
ω0 = 2πf1/р,
где f1 — частота напряжения питания, р – число пар полюсов обмотки статора. Следовательно, осуществляя изменение частоты подаваемого напряжения, можно плавно регулировать угловую скорость вращающегося поля статора, а значит и частоту вращения ротора двигателя.
Структурная схема, представленная на рис.1 показывает, как устроен преобразователь частоты (ПЧ), работающий в составе ЧРЭП (ЧРЭП — частотно регулируемый электропривод).
Рис. 1. Схема частотного регулирования
Переменное сетевое напряжение Ucпромышленной частоты fc выпрямляется диодным мостом (В) и после LC – фильтра, сглаживающего пульсации, поступает на вход инвертора (И), который является ключевым узлом всего привода.
Простой Г – образный LC – фильтр представляет собой комбинацию индуктивности (дросселя) и ёмкости (конденсатора), которые включены соответственно последовательно и параллельно нагрузке выпрямителя. Выпрямленное напряжение, кроме постоянной составляющей, содержит также переменную, имеющую вид однонаправленных пульсаций с некоторой амплитудой. Наличие высокочастотных составляющих, обусловленных пульсациями, негативно сказывается на работе электроники, поэтому частотно регулируемые электроприводы (ЧРЭП), как правило, оборудуются фильтрами подобного рода. Работает фильтр следующим образом. Индуктивность, включенная последовательно с нагрузкой, беспрепятственно пропускает постоянную составляющую тока, оказывая ей лишь незначительное активное сопротивление проводов катушки. Переменная же составляющая тока испытывает индуктивное сопротивление дросселя. При этом, в полупериод нарастания тока, дроссель индуцирует ЭДС противоположного направления. В это время происходит намагничивание сердечника, то есть накопление энергии. В этот же полупериод происходит заряд конденсатора фильтра. В полупериоде спада тока, запасенная дросселем энергия высвобождается, препятствуя его уменьшению, а конденсатор разряжается на нагрузку, также поддерживая величину тока. В результате этого происходит значительное сглаживание переменной составляющей.
Инвертор формирует на выходе переменное напряжение с изменяемой частотой и амплитудой. Основу схемы инвертора составляют силовые электронные ключи, функции которых выполняют транзисторы, изготовленные по IGBT – технологии. Для управления ключами используется принцип широтно–импульсной модуляции (ШИМ). Управляющие сигналы формирует система импульсно – фазового управления.
Процесс регулирования привода может осуществляться либо вручную, путем установки задания оператором, либо в автоматическом режиме.
Эффективность применения ЧРП в различных областях
Экономический эффект от применения частотного регулирования хорошо иллюстрируется на примере насосных станций городской системы водоснабжения. Работа данных систем характеризуется необходимостью поддержания определенного давления в водоводе, которое функционально связано с изменяющимся во времени потреблением воды. До появления систем управления, использующих частотный привод, регулирование давления осуществлялось количеством одновременно находящихся в работе насосных агрегатов, а также положением задвижек, то есть, дросселированием.
На рисунке 2 представлен график сравнительного потребления мощности при использовании дросселирования и частотного регулирования.
Рисунок 2. Потребление мощности при использовании дросселирования и частотного регулирования.
Точка пересечения графиков, в которой значения мощности и потока достигают 100%, соответствует полностью открытой задвижке (при регулировании дросселированием) и работе агрегата на полную мощность (при частотном регулировании). В этом режиме применение ЧРП не приносит экономического эффекта. Но при дросселировании, когда задвижка открыта лишь частично, потребляемая электродвигателем мощность в несколько раз больше, чем в варианте с применением частотного регулирования и полностью открытой задвижкой. При этом, разница в потреблении тем больше, чем меньше требуемая производительность агрегата. Это обусловливает существенную экономию электрической энергии при внедрении ЧРП, так как режим ограничения подачи имеет большой удельный вес в графике работы насосов (например, в ночное время при практическом отсутствии потребления).
В некоторых случаях, необходимость плавного регулирования угловой скорости валов механизмов диктуется самой технологией. Например, мощность котлов и энергоблоков тепловых станций регулируется плавным изменением производительности механизмов подачи топлива. На ГРЭС и ТЭЦ, работающих на угле, последний, перед подачей в топку котла, измельчается в мельницах до пылевидного состояния. Подачу угольной пыли в топку выполняет ППЛ (питатель пыли лопастный). Привод этого механизма традиционно осуществляется двигателем постоянного тока с регулируемыми оборотами. Регулирование производится посредством тиристорного блока управления. Электродвигатели постоянного тока имеют целый ряд эксплуатационных недостатков. Они дороги, щеточный механизм этих электрических машин подвержен быстрому износу, весьма чувствителен к загрязнениям и нуждается в периодической регулировке и чистке.
Кроме применения двигателей постоянного тока, функция бесступенчатого регулирования реализуется с помощью механических вариаторов, например, в крупных станочных приводах. Применение механических коробок передач всегда сопровождается существенными потерями, к тому же, такие системы обладают ограниченным диапазоном регулирования.
Использование частотного привода, укомплектованного асинхронным двигателем, имеющим короткозамкнутый ротор, позволяет избавиться от перечисленных недостатков двигателей постоянного тока и механических систем регулирования. Следует особо подчеркнуть, что наибольшую выгоду приносит применение именно электродвигателей с короткозамкнутым ротором. Эти машины наиболее дешевы, конструктивно просты, не имеют щеточного аппарата и могут быть приспособлены для работы в самых тяжелых условиях.
Внедрение систем управления, использующих частотно регулируемый привод, является инновационным мероприятием и, как правило, быстро окупается.
Для консультации или заказа частотно регулируемых приводов воспользуйтесь формой обратной связи на странице контактов.
Частотный привод. Применение, назначение, преимущества ЧРП
Регулируемый электропривод предназначен для управления двигателем путем контроля параметров. Скорость прямо пропорциональна частоте. Поэтому, варьируя частотой, можно поддерживать скорость вращения вала мотора, заданную согласно технологии. Пошаговое описание рабочего процесса для частотно-регулируемого привода (ЧРП) выглядит примерно так.
- Шаг первый. Преобразование диодным силовым выпрямителем одно- или трехфазного входного тока в постоянный.
- Шаг второй. Контроль преобразователем частоты за крутящим моментом и скоростью вращения вала электродвигателя.
- Шаг третий. Управление выходным напряжением, поддерживание постоянного соотношения U/f.
Устройство, выполняющее на выходе системы обратную функцию генерации постоянного тока в переменный, именуется инвертором. Избавление от пульсаций на шине достигается путем добавления дросселя и конденсатора фильтра.
Как выбрать частотно-регулируемый электропривод
Преобладающее число частотных преобразователей изготавливаются со встроенным фильтром электромагнитной совместимости (ЭМС).
Различаются такие виды управления, как скалярное, бездатчиковое и датчиковое векторное, и др. Согласно заданным приоритетам в принятии управленческих решений, приводы выбираются по:
Если ЧРП предназначен для асинхронного двигателя с большим сроком эксплуатации, то рекомендуется выбирать частотный преобразователь с завышенным током на выходе.С помощью современных преобразователей частоты возможно управление с пульта, по интерфейсу или комбинированным методом.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, в том числе насосов и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначенные для приема и преобразования энергии, защиты электрооборудования от токов КЗ, перегрузки) позволяют:
- плавно запускать двигатель, а, следовательно, уменьшать его износ;
- останавливать, поддерживать частоту вращения вала двигателя.
Комплектные ЧРП шкафного исполнения до 1кВ выполняют те же задачи по отношению к двигателям с мощностью 0,55 – 800 кВт. Привод нормально работает, когда напряжение в электросети находится в пределах от -15% до +10%. При безостановочной работе снижение мощности наступает, если напряжение составляет 85%-65%. Общий коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется посредством автоматического включение резерва (АВР).
Преимущества использования
С точки зрения оптимизации и потенциальные преимущества предоставляют возможность:
- регулировать процесс с высокой точностью;
- удалённо диагностировать привод;
- учитывать моточасы;
- следить за неисправностью и старением механизмов;
- повышать ресурс машин;
- значительно снижать акустический шум электродвигателя.
Заключение
Что такое ЧРП? Это мотор-контроллер, который управляет электродвигателем за счет регулировки частоты входной сети, и одновременно защищает агрегат от различных неисправностей (токовой перегрузки, токов КЗ).
Электрические приводы (выполняющие три функции, связанные со скоростью, управлением и торможением) являются незаменимым устройством для работы электродвигателей и других вращающихся машин. Системы активно применяются во многих сферах производства: в нефтегазовой отрасли, атомной энергетике, деревообработке и др.
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.

Частотный преобразователь небольшой мощности

Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.


Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ — широтно-импульсная модуляция
- ПВМ — пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).

Схема двухуровневого инвертора напряжения

Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.

Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, «High-Performance Motor Drives», IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.

Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.

Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.

Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.

Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.

Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.

Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.

Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.

Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).

Схема непрямого матричного преобразователя

Схема разреженного матричного преобразователя
Библиографический список
Типы электродвигателей и их применение
 Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. По сути, существует три типа электродвигателей: электродвигатели переменного тока (синхронные и асинхронные электродвигатели), электродвигатели постоянного тока (щеточные и бесщеточные) и электродвигатели специального назначения.
Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. По сути, существует три типа электродвигателей: электродвигатели переменного тока (синхронные и асинхронные электродвигатели), электродвигатели постоянного тока (щеточные и бесщеточные) и электродвигатели специального назначения.
Каков принцип работы электродвигателя?
- Когда проводник с током расположен во внешнем магнитном поле, перпендикулярном проводнику, на проводник действует сила, перпендикулярная ему самому и внешнему магнитному полю.
- Правило правой руки для силы, действующей на проводник, может использоваться для определения направления силы, действующей на проводник: если большой палец правой руки указывает в направлении тока в проводнике, а пальцы силы на проводнике кондуктор направлен наружу от ладони правой руки.
- Аналоговые электросчетчики (т. Е. Гальванометр, амперметр, вольтметр) работают по принципу двигателя. Электродвигатели — важное применение принципа двигателя.
Конструкция 
Электродвигатель состоит из постоянного внешнего полевого магнита (статора) и спирального токопроводящего амперметра (ротора), который может свободно вращаться внутри полевого магнита. Щетки и коммутатор (сконструированные по-разному, если на якорь подается переменный или постоянный ток) подключаются к якорю к внешнему источнику напряжения. Скорость вращения двигателя зависит от силы тока, протекающего через него, количества катушек на якоре, силы магнитного поля, проницаемости якоря и механической нагрузки, связанной с валом.
Типы двигателей
В целом электродвигатели подразделяются на два типа (двигатели переменного тока и двигатели постоянного тока).
Сейчас!
Узнаем подробно о подтипах двигателей переменного и постоянного тока.
Типы двигателей переменного тока
Синхронные двигатели
Есть два типа синхронных двигателей.
- Обычный
- Super
Асинхронные двигатели
Асинхронные двигатели
Коллекторные двигатели
- Серия
- Компенсированный
- Индукционный
- Отталкивание
- Отталкивание
- Отталкивание
Классификация по виду тока
Классификация по скорости работы
- Постоянная скорость.
- Переменная скорость.
- Регулируемая скорость.
Классификация на основе конструктивных особенностей
- Открытая
- Закрытая
- Полузакрытая
- Вентилируемая
- Трубная вентилируемая
- Заклепочная рама-проушина и т. Д.
Типы двигателей постоянного тока Типы:
- Двигатели с постоянным магнитом
- Щеточный двигатель постоянного тока
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой
- Составной двигатель постоянного тока
- Совокупный составной
- Дифференциальный составной
- Двигатель постоянного тока
- с постоянным магнитом С автономным возбуждением
- Бесщеточный двигатель постоянного тока
- Двигатели постоянного тока без сердечника или без сердечника
- Двигатели постоянного тока с печатным якорем или блинчиком
- Универсальные двигатели
Двигатель постоянного тока 
В общем, двигатели постоянного тока наиболее желательны в двух ситуациях.Первый — это когда единственная доступная энергия — это постоянный ток, который встречается в автомобилях и небольших устройствах с батарейным питанием. Другой — когда кривую крутящего момента-скорости нужно тщательно подправить. По мере развития технологий и управления двигателями переменного тока этот аспект становится менее важным, но исторически двигатель постоянного тока легко настраивался, что делало его подходящим для сервоприводов и тяговых устройств. С относительной скоростью высокого тока и низкого напряжения. Разновидностями стандартного двигателя постоянного тока являются силовой и бесщеточный двигатель постоянного тока, который представляет собой очень сложное устройство по сравнению со стандартным двигателем.Двигатели постоянного тока используются в приложениях, требующих управления скоростью или положением, и когда требуется высокий пусковой момент, поскольку двигатели переменного тока испытывают трудности в этой области.
Смотрите также:
Двигатели с постоянным магнитом (PM)
- Двигатель с постоянным магнитом (PM) отличается от двигателя постоянного тока с полем обмотки в одном отношении: двигатель с постоянным магнитом получает свое поле от постоянного магнит, тогда как в двигателе постоянного тока с возбужденным полем поле создается, когда ток возбуждения протекает через катушки возбуждения.
- В двигателе с возбужденным полем магнитный поток остается постоянным только до тех пор, пока постоянным остается ток возбуждения. Но в отличие от этого в двигателе с постоянными магнитами поток всегда постоянный.
- Мощность, производимая любым двигателем, определяется по формуле:

Где P ° = выходная мощность (в л.с.)
T = крутящий момент (в фунтах — фут)
N rt = ротор скорость (в об / мин)
- Таким образом, выходная мощность пропорциональна произведению крутящего момента и скорости.
Двигатели с постоянными магнитами можно разделить на 3 типа:
- Обычный двигатель с постоянными магнитами
- Двигатель с подвижной катушкой
- Бесщеточный двигатель постоянного тока
Обычный двигатель с постоянными магнитами
Обычные электродвигатели с постоянными магнитами включают роторный узел с полюсными постоянными магнитами прикреплен к ступице ротора и заключен в немагнитную металлическую втулку. Традиционные узлы ротора включают немагнитный материал, такой как, например, пластик, между каждым из постоянных магнитов, чтобы поддерживать желаемую ориентацию постоянных магнитов на ступице ротора.Посадка с натягом между металлической втулкой и постоянными магнитами плотно прилегает к ротору.
Ротор с подвижной катушкой
Двигатель с подвижной катушкой (MCM), хотя и является двигателем с постоянными магнитами, отличается от обычного первичного двигателя с постоянными магнитами якорем. MCM является результатом инженерного требования, чтобы двигатели имели высокий крутящий момент, низкую инерцию ротора и низкую электрическую постоянную времени. Эти требования выполняются в MCM.
Моментный двигатель
Можно предположить, что все двигатели создают крутящий момент.Следовательно, все двигатели можно назвать моментными двигателями. Однако моментный двигатель отличается от других двигателей постоянного тока тем, что он должен работать в течение длительных периодов времени в условиях остановки или низкой скорости. Не все двигатели постоянного тока предназначены для этой операции. Низкое cemf означает, что будет протекать большой ток якоря. Большинство обычных двигателей постоянного тока не предназначены для рассеивания тепла, создаваемого этим большим током. Но моментные двигатели предназначены для работы на низкой скорости или в условиях остановки в течение длительных периодов времени и используются в таких приложениях, как намотка или ленточные накопители.В намоточных устройствах натяжение часто регулируется моментным двигателем.
Шаговый двигатель
- Шаговый двигатель — это действительно цифровой двигатель.
- После того, как ротор сделает шаг, он останавливается, пока не получит импульс.
- Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические движения.
- Вал или шпиндель шагового двигателя вращается с дискретными шагами при подаче на него электрических командных импульсов в правильной последовательности.
- Вращение двигателя напрямую связано с этими приложенными входными импульсами.
- Последовательность подаваемых импульсов напрямую зависит от направления вращения валов двигателя. Скорость вращения валов двигателя зависит от частоты входных импульсов, а длина вращения напрямую связана с количеством подаваемых входных импульсов.
Связанные темы
.производителей электродвигателей | Поставщики электродвигателей
Список производителей электродвигателей
Применения
Электродвигатели переменного и постоянного тока имеют одно общее применение — приводное оборудование. В этом контексте техника может быть чем угодно, от грузовика до электрической зубной щетки.
Электродвигатели приводят в действие продукцию в бесчисленных отраслях промышленности, включая электронику, строительство, товары для дома и офиса, бытовую технику (двигатели смесителей, двигатели холодильников и т. Д.)), автомобилестроение, транспорт и промышленное производство. Самые большие электродвигатели используются для таких применений, как сжатие трубопроводов, движение судов и гидроаккумулирование, в то время как самые маленькие электродвигатели могут поместиться в электрических часах.
История
Электродвигатели появились в 1740-х годах, когда шотландский монах по имени Эндрю Гордон создал первое электростатическое устройство. Примерно 60 лет спустя, в 1820 году, французский физик Андре-Мари Ампер обнаружил, как можно создать механическую силу, облегчая взаимодействие между двумя проводниками с током.Он записал этот принцип, который позже стал известен как закон силы Ампера. От его имени мы также получили базовую единицу измерения электрического тока в системе СИ — ампер или ампер.
Через год после того, как Ампер открыл закон силы Ампера, британский ученый Майкл Фарадей успешно провел эксперименты, демонстрирующие этот принцип. Сначала он окунул провод в ртуть и прикрепил к нему постоянный магнит. Затем он пропустил ток через провод. Когда ток двигался по проволоке, проволока вращалась вокруг магнита.Это доказало, что ток создает круговое магнитное поле вокруг провода. В 1822 году человек по имени Питер Барлоу провел аналогичный, но обновленный эксперимент. Во время своего эксперимента он окунул кончики звездообразного колеса (колеса Барлоу) в ртуть, когда оно вращалось. Его результаты его эксперимента перекликались с результатами Фарадея.

Бесщеточный двигатель постоянного тока — решения для электродвигателей
Подобные эксперименты установили определенные принципы, такие как электромагнитная индукция, которые позже ученые и инженеры могли использовать в качестве отправной точки.Например, в 1827 году венгерский священник и ученый Аньош Йедлик построил первый узнаваемый электродвигатель — он содержал ротор, статор и коммутатор. Несколько лет спустя он построил модель автомобиля, которая работала от электродвигателя. В 1832 году британский ученый Уильям Стерджен построил первый электродвигатель постоянного тока. В 1834 году американский кузнец Томас Дэвенпорт изобрел электродвигатель с батарейным питанием, с помощью которого он приводил в движение гусеничные малолитражки. Спустя три года после этого Давенпорт и его жена Эмили запатентовали конструкцию первого электродвигателя, который можно было использовать в коммерческих целях.В 1840 году он использовал свой электродвигатель для привода станков и печатного станка, чтобы напечатать собственную газету по механике. Это была первая газета, печатавшаяся на электроэнергии. Изобретения Давенпорта были гениальными, но, поскольку батареи еще не были экономически жизнеспособными, он в конечном итоге обанкротился.
Примерно в то же время немецкий физик и инженер Мориц фон Якоби создал вращающийся электродвигатель, с помощью которого он мог приводить в движение небольшую электрическую лодку через реку.В 1871 году бельгийский инженер-электрик Зеноб Грамм построил первый двигатель постоянного тока, который приносил хоть какие-то деньги. В 1887 году Никола Тесла изобрел двигатель переменного тока, продукт, который использует переменный ток и не требует коммутатора. Примерно в то же время, в 1886 году, американец Фрэнк Дж. Спраг изобрел первый неискрящий двигатель постоянного тока, который мог продолжать двигаться с одинаковой скоростью независимо от нагрузки. Между 1887 и 1888 годами Спраг изобрел электрические тележки, которые инженеры впервые применили в Ричмонде, штат Вирджиния.В 1892 году он изобрел электрический лифт и спроектировал L-систему Чикаго, более формально известную как Южная эстакада.
В 20 веке электромоторы изменили мир. Они сократили рабочую силу повсюду, от производственного цеха до дома, они сделали машины более эффективными, они повысили уровень жизни, они позволили производить лучшую продукцию и расширили возможности путешествий. Сегодня электродвигатели — неотъемлемая часть нашей жизни.
Конструкция
При выборе или разработке нестандартных двигателей для вас производители электродвигателей будут учитывать различные аспекты вашего приложения, в том числе то, насколько быстро вы хотите, чтобы двигатель работал, как часто вы его используете, среду, в которой вы будет использовать его и загружать детали (вес, местоположение и т. д.). Основываясь на этих факторах, они будут выбирать между мощностью переменного тока и мощностью постоянного тока, мощностью в лошадиных силах / ваттах (выходная мощность), числом оборотов в минуту (оборотов в минуту), изменчивостью скорости по сравнению с фиксированной скоростью вращения и номинальными токами.Производители также могут варьировать ваши электродвигатели по количеству роторов и магнитных полюсов статора и размерам. Узнайте больше, рассмотрев свое приложение с потенциальными поставщиками.
Характеристики
Компоненты
В общем, электродвигатели состоят из ротора, статора, обмоток, воздушного зазора и коммутатора.
Ротор
В этом контексте ротор представляет собой движущуюся часть, которая передает механическую мощность при перемещении вала.Для достижения этого вращательного движения ротор обычно имеет встроенные токоведущие проводники, которые взаимодействуют с магнитным полем, создаваемым статором. Однако в некоторых случаях ротор несет на себе магниты, а статор удерживает проводники.
Статор
В отличие от ротора, статор не движется. Скорее, это фиксированный компонент электромагнитной цепи двигателя. Обычно он состоит из сердечника и постоянных магнитов или обмоток. Этот сердечник состоит из нескольких тонких металлических листов, называемых пластинами, которые используются для уменьшения потерь энергии.
Обмотки
Обмотки спиральные. Когда они оборачиваются вокруг сердечника и после того, как на них подается ток, назначение этих катушек — формирование магнитных полюсов.
Воздушный зазор
Далее воздушный зазор — это расстояние между ротором и статором. Воздушный зазор обеспечивает большую часть низкого коэффициента мощности, при котором работают двигатели, за счет увеличения и уменьшения тока намагничивания по мере необходимости. Таким образом, поскольку большой воздушный зазор оказывает сильное негативное влияние на характеристики двигателя и может вызвать механические проблемы, потери и шум, воздушный зазор должен быть как можно меньше.
Коммутатор
Наконец, коммутатор — это часть, используемая для периодического переключения направления тока между внешней цепью и ротором. Он используется с большинством двигателей постоянного тока и с универсальными двигателями. Коммутатор состоит из цилиндра, состоящего из нескольких металлических контактов или контактных колец, сегментов и якоря, на котором сегменты вращаются. Два или более электрических контакта, называемых щетками, создают скользящий контакт с сегментами, прижимаясь к ним при их вращении, позволяя току проходить через них и достигать ротора.
Конфигурации
Все электродвигатели имеют две основные конфигурации полюса магнитного поля, из которых можно выбрать: явный полюс и невыраженный полюс.
Яркий полюс
Магнитное поле явнополюсной машины создается обмоткой, намотанной под лицевой стороной полюса.
Невыступающий полюс
В случае машины с невыпадающими полюсами, также известной как машина с круглым ротором или машина с распределенным полем, обмотки создают магнитное поле, когда они наматываются на прорези на торцах полюсов.
Затененный полюс
Третья конфигурация полюса, затененный полюс, задерживает фазу магнитного поля полюса. Для этого требуется обмотка, состоящая из медного стержня или кольца, называемая затеняющей катушкой, которая огибает определенную часть этого полюса.
Типы
Типы по источнику тока
Электродвигатели переменного тока питаются от приложенного переменного тока. Переменные токи, которые проходят через катушки, создают вращающееся магнитное поле, которое, в свою очередь, передает крутящий момент на выходной вал.Им не нужен коммутатор. Общие источники питания переменного тока включают инверторы, генераторы и электрические сети.
Двигатели постоянного тока получают питание от постоянного тока. Напряжение, создаваемое токами, заставляет обмотку якоря вращаться, в то время как невращающаяся обмотка каркаса поля якоря действует как постоянный магнит. Пользователи двигателей постоянного тока могут управлять своей скоростью, регулируя ток корпуса возбуждения или изменяя приложенное напряжение. Токи постоянного тока часто вырабатываются выпрямителями, электромоторами и батареями.
Универсальные двигатели могут работать как на переменном, так и на постоянном токе.
Типы по внутренней конструкции
Щеточные двигатели , иногда называемые коммутируемыми электродвигателями, являются одним из двух основных типов электродвигателей, которые классифицируются по внутренней конструкции. Щеточные двигатели, которые почти всегда используют постоянный ток, получили свое название от коммутатора, который поставляется с несколькими щетками. Эти щетки всегда сделаны из мягкого проводящего материала; почти исключительно производители используют углерод, иногда с добавлением медного порошка для улучшения проводимости.Пять основных типов щеточных двигателей: двигатели с раздельным возбуждением, двигатели с последовательной обмоткой постоянного тока, двигатели постоянного тока с постоянными магнитами, комбинированные двигатели постоянного тока и двигатели с параллельной обмоткой постоянного тока.
Бесщеточные двигатели намного более эффективны, чем щеточные двигатели, и они быстро их заменяют. В этих двигателях вместо щеток используются датчики, известные как датчики на эффекте Холла, для передачи тока. Они состоят из трехфазной катушки, внешнего ротора с постоянным магнитом, электроники привода и датчика.Трехфазная катушка — это элемент двигателя, который ссылается на другой тип классификации двигателей, основанный на способах движения двигателя.
Мотор-редукторы используют зубчатые головки для изменения скорости.
Электродвигатели со ступицей — это двигатели, встроенные в ступицу колеса. Они напрямую приводят в движение колесо.
Типы по средствам движения
Наиболее распространенные классификации движения двигателей включают трехфазные двигатели, однофазные двигатели, линейные двигатели, шаговые двигатели и двигатели 12 В.
Трехфазные электродвигатели отличаются простотой конструкции и высоким КПД. Обычно это тип асинхронного двигателя, трехфазные двигатели работают с использованием трех переменных токов, которые распределяют преобразованную механическую энергию.
Однофазные двигатели — еще один пример асинхронного двигателя. На этот раз они используют однофазный или однофазный источник питания двигателя, которым обычно является переменный ток.
Линейные двигатели вырабатывают механическую энергию по прямой или линейной линии.Другими словами, линейные двигатели обеспечивают движение в одной плоскости.
Шаговые двигатели во многом похожи на трехфазные синхронные двигатели. Основное различие между ними состоит в том, что, хотя 3-фазные синхронные двигатели вращаются непрерывно, шаговые двигатели должны непрерывно запускаться и останавливаться. Шаговые двигатели широко используются в 3D-принтерах и роботах.
Двигатели на 12 В генерируют движение, используя двенадцать вольт электроэнергии, что является стандартным.
Типы по методу преобразования энергии
Наконец, электродвигатели по-разному преобразуют энергию.Таким образом, двигатели делятся на синхронные, асинхронные, электростатические и серводвигатели.
Синхронные двигатели — это двигатель переменного тока. Они преобразуют напряжение в энергию, используя проходящий ток и ротор, которые движутся с одинаковой скоростью. Вместе эти элементы создают вращающееся магнитное поле. Синхронные двигатели обладают способностью поддерживать постоянную скорость при изменении крутящего момента.
Асинхронные двигатели , иногда называемые асинхронными двигателями, работают по принципу электромагнитной индукции.По сути, они работают, когда электрический проводник проходит через магнитное поле и впоследствии производит напряжение. Асинхронные двигатели дешевле синхронных.
Электростатические двигатели работают за счет притяжения и отталкивания электрического заряда. Обычно они потребляют много энергии, но доступны и меньшие модели с более низким напряжением. Например, небольшие электростатические двигатели являются обычными компонентами микромеханических систем (MEMS).
Серводвигатели работают с использованием сервомеханизмов (сервоприводов), которые обнаруживают ошибки и автоматически исправляют их.У них также есть встроенные микроконтроллеры, которые позволяют пользователям предлагать им перемещать точное количество градусов, когда они захотят. Серводвигатели исключительно малы. Они распространены в роботизированных приводах, автомобилях с дистанционным управлением и самолетах для хобби.
Принадлежности
Электродвигатели имеют бесчисленное множество принадлежностей. Примеры распространенных аксессуаров для электродвигателей включают фазовые преобразователи (используемые для преобразования мощности переменного тока в мощность постоянного тока и наоборот), подшипники, крышки вентиляторов, комплекты двигателей, монтажные комплекты, дождевики, тормозные комплекты, пульты дистанционного управления, контроллеры скорости / напряжения и распределительные коробки.
Стандарты
В Соединенных Штатах одним из наиболее важных стандартов, связанных с электродвигателями, являются стандарты, разработанные NEMA или Национальной ассоциацией производителей электрооборудования. NEMA присваивает разным двигателям стандартные размеры, которые вы можете просмотреть в таблицах, которые они отправляют производителям. Другие стандартные требования связаны с вашей отраслью, областью применения и местоположением. Изучите стандарты, которым должны соответствовать ваши электродвигатели, поговорив с лидерами отрасли.
На что следует обратить внимание
Если вы ищете электродвигатель, первое, что вам нужно сделать, это убедиться, что вы знаете свои характеристики. Мы рекомендуем, прежде чем звонить любым производителям, перечислить все, что вы ищете (или не ищете), включая данные вашего приложения, ваш бюджет, срок доставки, ваши предпочтения после доставки (помощь в установке, техническая поддержка и т. .) и ваши стандартные требования. Подробное обсуждение этих вопросов с компанией, производящей электромоторы, поможет вам понять, подходят ли вы друг другу.
Чтобы найти «правильную посадку», ознакомьтесь с перечнем высококачественных производителей, которые мы перечислили на этой странице. Просмотрите их профили и веб-страницы, чтобы узнать, подходят ли они вам. Выберите трех или четырех главных претендентов, а затем позвоните каждому из них, чтобы обсудить вашу заявку. После того, как вы поговорите с каждым из них, сравните и сопоставьте свои разговоры и выберите тот, который, по вашему мнению, предложит вам лучший сервис в рамках вашего бюджета и временных рамок. Удачи!
Информационное видео об электродвигателях
.Запасные двигатели HVAC для печей, кондиционеров, тепловых насосов, болотных охладителей

Запасные двигатели HVAC для
печей, кондиционеров, тепловых насосов, болотных охладителей и др.
После рыночной замены от
Century, Fasco, Rotom, Nidec, Marathon
Справочные номера относятся только к предлагаемым заменам
Сортировать по: Популярные товары Новейшие товары Лучшие продажи От А до Я Я в А По обзору Цена: по возрастанию Цена: По убыванию
Nidec
0.167 л.с. 1450 об / мин 3-ступенчатая 115-120В; 5-дюймовый вентиляторный двигатель Nidec # 1257
MSRP:
Был:
Сейчас: $ 151,74
Nidec
1 л.с. 1075 об / мин 1-ступенчатая 208-230 В; 5.6-дюймовый конденсаторный двигатель Nidec # 1888
MSRP:
Был:
Сейчас: $ 245,82
Nidec
1 л.с. 1075 об / мин 3-ступенчатая 115 В; 5.6-дюймовый вентиляторный двигатель Nidec # 8906
MSRP:
Был:
Сейчас: $ 113,53
Nidec
1 л.с. 1075 об / мин 3-ступенчатая 208-230В; 5.6-дюймовый вентиляторный двигатель Nidec # 8907
MSRP:
Был:
Сейчас: $ 116,29
Nidec
1 л.с. 1080 об / мин 1-ступенчатая 200 В; 5.6-дюймовый двигатель вентилятора конденсатора Nidec # 8068
MSRP:
Был:
Сейчас: $ 352,27
Nidec
1 л.с. 1100 об / мин 3-ступенчатая 460V; 5.6-дюймовый вентиляторный двигатель Nidec # 2553
MSRP:
Был:
Сейчас: $ 279,35
Nidec
1 л.с. 1100 об / мин 4-ступенчатая 208-230 В; 5.6-дюймовый вентиляторный двигатель Nidec # 4670
MSRP:
Был:
Сейчас: $ 190,22
Nidec
1 л.с. 1140 об / мин 200-230 / 460В; 5.6-дюймовый вентиляторный двигатель Nidec # 1326
MSRP:
Был:
Сейчас: $ 332,98
Nidec
1 л.с. 1625 об / мин 3-ступенчатая 115 В; 5.6-дюймовый вентиляторный двигатель Nidec # 1699
MSRP:
Был:
Сейчас: $ 181,96
Nidec
1 л.с. 1725/1140 об / мин, 2-ступенчатая, 115 В; 6.5-дюймовый двигатель испарительного охладителя Nidec # 2574
MSRP:
Был:
Сейчас: $ 247,19
Nidec
1.5 л.с. 1200 об / мин 182T Рама 208-230 / 460V ODP Motor Electri
EVO
Электродвигатели с осевым потоком EVO от AVID идеально подходят для силовых установок электромобилей и других высокопроизводительных приводов и исполнительных механизмов, таких как приводы робототехники и силовые установки для электрифицированных самолетов. Потому что двигатель с осевым потоком EVO имеет один из самых высоких значений крутящего момента и удельной мощности на рынке благодаря уникальной запатентованной конструкции.
Запатентованный легкий композитный ротор придает двигателю с осевым потоком EVO исключительно низкую инерцию.Это обеспечивает более высокий КПД в переходном рабочем цикле и улучшенную реакцию привода по сравнению с обычным двигателем.
В отличие от некоторых поставщиков двигателей, которые заявляют о недостижимых уровнях производительности, двигатель с осевым потоком EVO обеспечивает следующие и другие характеристики. Приведенные ниже показатели эффективности для двигателя с осевым потоком EVO измерены на динамометре. Они включают потери инвертора и имеют типичную температуру охлаждающей жидкости 55 ° C. Указанный нами вес соответствует установленному в автомобиле с охватываемым валом.
Двигатель с осевым потоком EVO имеет жидкостное охлаждение с помощью обычного водного гликоля, что означает отсутствие необходимости в дополнительных охлаждающих насосах или теплообменниках для дальнейшего снижения веса системы и снижения паразитных потерь. Система охлаждения имеет низкий перепад давления и большую площадь поверхности для эффективного управления температурой.
Все это подтверждено обширными проверками и испытаниями на долговечность, что означает, что стандартные машины EVO являются одними из самых надежных электронных машин на рынке.
Двигатель EVO идеально дополняет линейку высокоэффективных вспомогательных электрических систем и систем терморегулирования AVID для гибридных и электромобилей.Кроме того, AVID может предложить комплексные услуги по интеграции систем трансмиссии, помогая вам спроектировать, проверить и изготовить свой электрический или гибридный автомобиль.
Если у вас есть особые требования, например:
- Более высокие скорости
- Повышенная удельная мощность
- Повышенное рабочее напряжение
- Измененные размеры корпуса или монтажные положения
AVID может помочь вам с индивидуальным решением, поскольку конструкция EVO является очень гибкий.Наша команда опытных инженеров может разработать индивидуальное решение в соответствии с вашими требованиями.
Стандартные характеристики электродвигателя с осевым потоком EVO
Основные характеристики электродвигателя с осевым потоком EVO
- Очень высокий крутящий момент и удельная мощность
- Низкий крутящий момент зубчатого зацепления
- Достижимая удельная мощность> 10 кВт / кг
- Компактность конструкция с плоскими передней и задней сторонами для монтажа
- Напряжение: до 800 В постоянного тока
- Пиковая эффективность:> 96% (включая силовой инвертор)
- Композитный ротор с низким моментом инерции с превосходной динамической стабильностью ротора
- Водно-гликолевое охлаждение для упрощения установки и улучшенные характеристики
- Доступны сквозные валы и индивидуальные версии
- Встроенные датчики температуры PT100 и преобразователь sin / cos, совместимые с большинством имеющихся в продаже инверторов.
Типовые области применения
- Тяговые двигатели для электрических и гибридных автобусов и грузовиков
- Тяговые двигатели для высокопроизводительных электрических суперкаров и электромобилей Motorsport
- Гибриды конфигурации P1 / P2
- Прямой привод гребных винтов для авиационных и морских судов
- Высокопроизводительный генератор
Свяжитесь с нами сегодня, чтобы узнать больше о наших высокопроизводительных двигателях с осевым потоком
.