
Эффективный источник питания асинхронного двигателя
Эффективный источник питания асинхронного двигателя
Данное устройство предназначено для питания трехфазных асинхронных двигателей, серийно выпускаемых промышленностью от источника низкого напряжения 12V или от осветительной сети ~220V. В отличии от всех подобных устройств, схема исполузует рекурперацию энергии обратной ЭДС обмоток двигателя что позволяет в несколько раз снизить ток потребления двигателем, особенно на холостом ходу. Например, двигатель 0.6 кВт 1350 Об/мин на холостом ходу при номинальной частоте вращения потребляет всего 4.5А от источника 12V или около 300 мА от сети ~220V. Такого потребления невозможно добиться при всех существующих способах запитки подобных двигателей. Устройство формирует полноценные 3 фазы для обеспечения нормального вращения двигателя, что позволяет плавно регулировать частоту вращения двигателя в широких пределах. При питании устройства от сети с использованием умножителя напряжения (на каждую фазу двигателя подается в этом случае 400V) мощность двигателя становится близкой к номинальной. При дальнейшем увеличении напряжения питания мощность увеличится пропорционально (при этом, естественно, увеличится потребляемый ток). Фактически, предельная мощность двигателя зависит от параметров силовых элементов схемы (тиристоров и фазных конденсаторов), а таккже, от диэлектрической прочности изоляции обмоток двигателя, от способности обмотки выдерживать мощные импульсы тока, от механической прочности корпуса двигателя. При усовершенствовании схемы (замене деталей в силовой цепи на более высоковольтные) с двигателя можно снять мощности больше в несколько раз, чем позволяют его паспортные характеристики. Мощность можно увеличивать до тех пор, пока не расплавится обмотка в точках соединения или не разнесет корпус двигателя. Как уже отмечалось, при этом, естественно, вырастет ток потребления. Также замечу, что устройство не является «вечным двигателем» — при существущем дизайне асинхронного двигателя снять с него «лишнее» не получится. Однако, применение данной схемы позволяет легко повысить КПД двигателя от 0.
При дальнейшем увеличении напряжения питания мощность увеличится пропорционально (при этом, естественно, увеличится потребляемый ток). Фактически, предельная мощность двигателя зависит от параметров силовых элементов схемы (тиристоров и фазных конденсаторов), а таккже, от диэлектрической прочности изоляции обмоток двигателя, от способности обмотки выдерживать мощные импульсы тока, от механической прочности корпуса двигателя. При усовершенствовании схемы (замене деталей в силовой цепи на более высоковольтные) с двигателя можно снять мощности больше в несколько раз, чем позволяют его паспортные характеристики. Мощность можно увеличивать до тех пор, пока не расплавится обмотка в точках соединения или не разнесет корпус двигателя. Как уже отмечалось, при этом, естественно, вырастет ток потребления. Также замечу, что устройство не является «вечным двигателем» — при существущем дизайне асинхронного двигателя снять с него «лишнее» не получится. Однако, применение данной схемы позволяет легко повысить КПД двигателя от 0. 6 до 0.9, что может быть важно для энергосберегающих проектов (примечаение: КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%).
6 до 0.9, что может быть важно для энергосберегающих проектов (примечаение: КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%).
Характерной особенностью схемы является полное отсутствие нагрева двигателя и элементов схемы. Обмотки двигателя запитыватся короткими и мощными высокоамперными импульсами, через обмотки не протекает постоянный ток. Это не позволяет обмоткам стать активной нагрузкой, что исключает их нагрев. Также, двигатель не грееется (соответственно, не перегорает) в случае заклинивания ротора. В некотром роде, двигатель их асинхронного превращается в синхронный. Если судить по потребляемому току, получается, что при нагрузке вала, начинает пропорционально расти ток, однако когда нагрузка стеновится критической, энергия МП не в состоянии преодолеть силы торможения ротора, обороты двигателя резко падают, вал останавливается. При этом, также, падает ток. Стоит отпустить ротор, он начинает раскручиваться и постепенно входит в режим синхронизации. После входа в этот режим можно снимать нагрузку с вала.
После входа в этот режим можно снимать нагрузку с вала.
Главный недостаток схемы состоит в низком пусковом моменте двигателя. При напряжении питания 200V на каждую фазу и начальной частоте 25 Гц пуск и синхронизация наступает за 3 — 5 сек (при используемом двигателе), дальше, можно резко увеличить частоту до номинальной, при этом двигатель фактически мгновенно отрабатывает команду.
К преимуществам такой схемы запитки двигателя можно отнести низкий уровень шума при работающем двигателе, полное отсутствие характерного «гудения», вибрации и т.д. Ротор вращается очень мягко, что позволяет услышать механические деффекты двигателя. Например выяснилось, что в используемом двигателе оказался разбит передный подшипник — раньше, при нормальном включении за гулом и вибрацией этого не было слышно. Что касается современных т.н. «частотных преобразователей» используемых в металообрататывающих станках, последние, например, питают двигатель прямоугольными импульсами, что создает очень мощный шум — как будто работает не двигатель а сварочный трансформатор. При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект «проскальзывания» МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений.
При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект «проскальзывания» МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений.
Используемые в схеме детали доступны, практически, каждому радиолюбителю, что позволяет легко повторить или улучшить схему. Требуются дальнейшие иссследования данного способа включения двигателей, поэтому материал представляется в открытом виде. При повторении схемы, просьба сообщить об этом автору с целью обмена опытом.
Описание схемы
Для начала следует вспомнить, как надо правильно питать подобные двигатели. В учебниках пишут, что асинхронные двигатели следует запитывать только синусодальным трехфазным переменным током частотой 50Гц. Однако это не совсем так. Питание двигателя допускается любой формой сигналов в т.ч. прямоугольными импульсами. Существующие частотные преобразователи ШИМ позволяют не только регулировать частоту вращения ротора (она зависит только от частоты) но и мощность — она регулируется шириной импульса.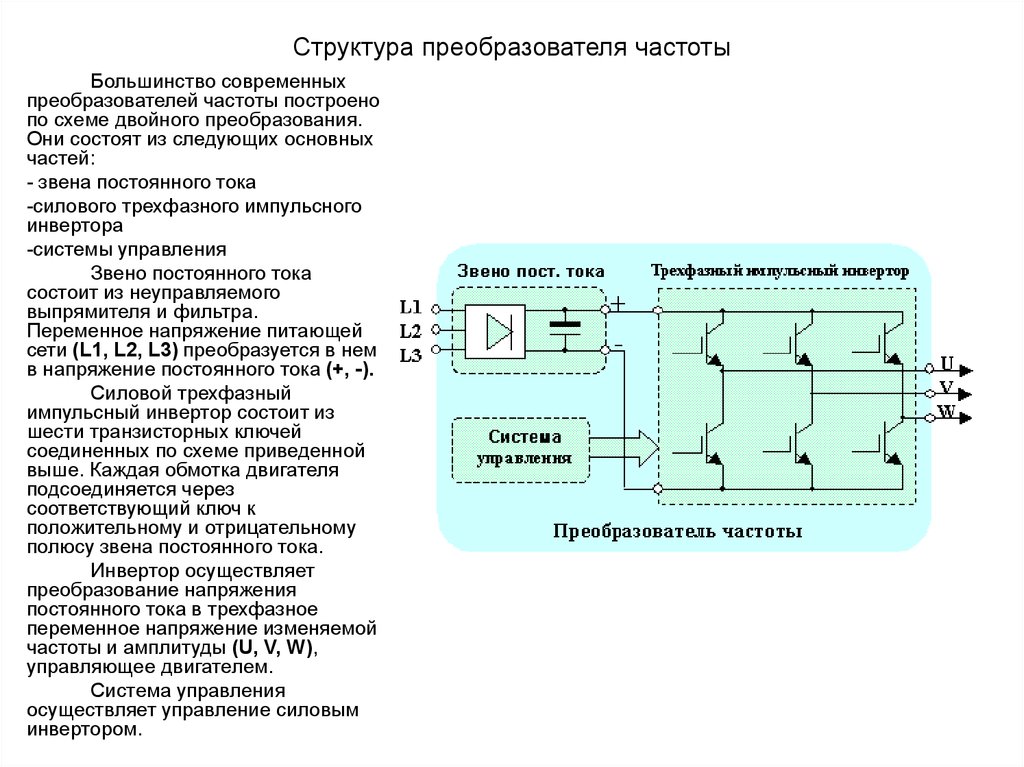 Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним как выглядит 3х фазный переменный ток.
Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним как выглядит 3х фазный переменный ток.
Глядя на график, можно сделать следующий простой вывод. Для обеспечения вращения двигателя надо подать на его фазные обмотки 6 импульсов, соответсвующие пикам каждой синусоды трехфазного тока. Соответсвенно, если использовать генератор импульсов имеющий 6 выходов последовательно выдающий импульс на каждый выход можно обеспечить создание вращающего магнитого поля внутри двигателя, что заставит последний вращаться. Если предствить, что каждая обмотка двигателя имеет точки начала и конца, то приложение напряжения к обмотке «А» в прямой полярности (т.е. на начало обмотки подводится «+») обозначить как «А» и в обратной полярности (на начало обмотки в этом случае подводится «-») обозначить как «А’» то полная схема коммутации обмоток примет следующий вид:
1. «А»
«А»
2. «C’»
3. «B»
4. «А’»
5. «C»
6. «B’»
Подавая такую последовательность импульсов на обмотки двигатель придет в движение. Форма импульсов (сунус или меандр) при этом совершенно не важна. Перед подключением двигателя следует его сфазировать. Для этого, собираем цепь от низковольтного источника питания 12-24V в разрыв которой включаем лампу (чтобы не сжечь двигатель или блок питания) и последовательно касаемся щупами клемм колодки двигателя, согласно схеме преведенной выше. Двигатель в этом случае, начнет немного вращаться. После того, как фазы и начала обмоток точно определены их следует пометить. Это будет важно при подключении двигателя к собранному устройству.
Схема источника питания состоит из трех фукнциональных блоков. Общая или силовая часть. Генератор импульсов. Инвертор напряжения. В целях снижения трудоемкости при изготовлении, а также, снижения помех, силовую часть и генератор целесообразно выполнить на одной плате. Инвертор может быть отдельным устройством (при питании от батареи) или его может не быть вообще в случае питания от осветительной сети. Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опысным относительно «земли» напряжением, поэтому для отладки устройства такой способ нежелателен.
Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опысным относительно «земли» напряжением, поэтому для отладки устройства такой способ нежелателен.
Как отмечалось выше, генератор импульсов выдает последовательно 6 импульсов, необходимых для обеспечения создания вращающегося магнитного поля в двигателе. Между импульсами отсутствуют «мертвые» интервалы — в данной схеме смысл в них отсутствует. Частота импульсов задается частотой тактового генератора, для получения номинальной частоты 50 Гц необходима частота генератора 300 Гц. Генератор имеет воможность регулировки частоты с помощью переменного резистора. Каждый импульс на выходе генератора содержит пакет из серии импульсов частотой около 8 кГц, необходимый для управления тиристорами в силовой части схемы. Безусловно, тиристорами можно управлять постоянным током (токовым импульсом) однако такой способ нецелесообразен. Дело в том, что при таком способе управления потребуется применять другие способы «отвязки» генератора от силовой части — например использовать трансформаторы на «железе» или конденсаторы значительной емкости, что негативно скажется на надежности работы устройства. Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множетство проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при лог. 1 на соответсвующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие-же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора т.е. образуется цепь: катод тиристора — обмотка трансформатора — управляющий электрод. Важно отметить, что в данном случае важно привильное фазирование обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров.
Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множетство проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при лог. 1 на соответсвующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие-же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора т.е. образуется цепь: катод тиристора — обмотка трансформатора — управляющий электрод. Важно отметить, что в данном случае важно привильное фазирование обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров.
несколько импульсов
Нет необходимости описывать коммутацию каждой обмотки, идея, надеюсь, понятна. Чтобы заработало нужно просто правильно собрать схему и сфазировать обмотки двигателя а также импульсные трансформаторы. Сейчас важно рассмотреть работу любой отдельной фазы для понимания механизма рекурперации энергии. Представим, что конденсатор, подключенный к обмотке фазы «А» полностью заряжен. В момент поступления на управляющий электрод тиристора сигнала, тиристор открывается. Ток начинает течь по цепи из конденсатора через обмотку и через открытый тиристор. В какой-то момент сила тока нарастает до такого состояния, что образованное вокруг катушки магнитное поле толкает ротор двигателя. Далее, энергия запасенная конденсатором начинает иссякать, его заряд постепенно истощается. В этот момент, энергия мигнитного поля внутри двигателя начинает наводить вокруг фазной обмотки ЭДС самоиндкукции, причем направление течения тока в цепи при этом не изменяется. Обмотка двигателя в этот момент сама становится источником энергии и начинается процесс заряда конденсатора напряжением с обратным знаком. Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса эненргии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, просходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответсвующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного т.
Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса эненргии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, просходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответсвующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного т. е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответсвующий тиристор и конденсатор пополняется энергией.
е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответсвующий тиристор и конденсатор пополняется энергией.
Требует поясненения цепь регенерации энергии. Известно, что имея заряженный конденсатор невозможно «напрямую» зарядить от него другой конденсатор так, чтобы напряжение на последнем было выше или равно исходному напряжению на первом конденсаторе. Поэтому, в цепи заряда применен дроссель. Однако, на самом деле, никакой это не дроссель, а часть контура, образованного с одной стороны конденсатром в инверторе большой емкости, катушкой дросселя, открытым тиристором и фазным конденсатором, заряд которого осуществляется в данный момент времени. Когда тиристор открывается, огромная энергия запасенная элекролитическим конденсатором большой емкости устремляется в обмотку дросселя, вокруг последней создается мощное магнитное поле.![]() В какой-то момент, энергия магнитного поля начинает спадать и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид:
В какой-то момент, энергия магнитного поля начинает спадать и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид:
1. «А»
2. «C’» — Rb
3. «B»
4. «А’» — Rc
5. «C»
6. «B’» — Ra
где Rx сигнал регенерации энергии в фазном конденсаторе соответсвующей фазы.
Именно поэтому 3 из 6 импульсных трансформаторов двухобмоточные: вторая обмотка управляет тиристором в цепи регенерации энергии. Сигнал на фазном конденсаторе при работающем двигателе представлен в следующей осцилограмме:
Более крупно:
Двойная линия внизу — это глюк фотоаппарата. Просто «синусоида» немного покачивается когда двигатель вращается.
Просто «синусоида» немного покачивается когда двигатель вращается.
Фотогалерея устройства. Опытный асихронный двигатель 0.6 кВт 1350 об/мин R обмоток 12 Ом. пр-во ГДР, 1970 г.в.
Блок управления и силовая часть. Между электроникой и тиристорами импульные трансформаторы. Толстые провода к двигателю.
Банк фазных конденсаторов 3×10 мкф 250 в.. К одному из них через резистор на 10 мОм подключен щуп осциллографа.
Дроссель, через который осуществляется регенерация энергии. Рядом конденсатор 470 мкф и предохранитель. Опасные штучки 😉
Инвертор 12 -> 200
В завершение, несколько ведео работающего устройства:
Запуск асинхронного двигателя
Работа асинхронного двигателя
Налаживание устройства
Перед включением устройства следует проверить правильность монтажа. Особенно тщательно нужно проверить отсутствие межобмоточных замыканий импульсных трансформаторов. В случае замыкания, разнесет не только тиристоры но и низковольтную электронику.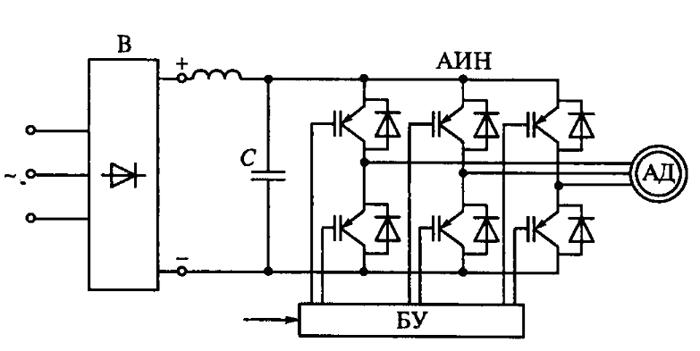 После выполнения проверок следует подать низковольтное питание на схему. Внимание! На данном этипа ни в коем случае не подавать на силовую часть никакое напряжение! Это можно сделать после того, как будет проверена и отлажена слаботочная часть схемы. Включив питание управления +12 V сразу проверяем ток. Он не должен превышать 70-100 мА, если ток значительно больше — где-то в схеме КЗ или дохлая(е) микросхемы и т.д. Если ток меньше 50 мА где-то в цепях обрыв. Проверьте еще раз монтаж схемы. Если ток в норме, первым делом следует проверить напряжение на выходе внутреннего стабилизатора +9 V.
После выполнения проверок следует подать низковольтное питание на схему. Внимание! На данном этипа ни в коем случае не подавать на силовую часть никакое напряжение! Это можно сделать после того, как будет проверена и отлажена слаботочная часть схемы. Включив питание управления +12 V сразу проверяем ток. Он не должен превышать 70-100 мА, если ток значительно больше — где-то в схеме КЗ или дохлая(е) микросхемы и т.д. Если ток меньше 50 мА где-то в цепях обрыв. Проверьте еще раз монтаж схемы. Если ток в норме, первым делом следует проверить напряжение на выходе внутреннего стабилизатора +9 V.
Далее, проверяем работу генератора импульсов на микросхеме NE 555. К выходу микросхемы подключаем осциллограф и смотрим сигнал. Должны присутствовать короткие (около 20 мксек) импульсы с амплитудой близкой к напряжению источника питания. Частота импульсов должна быть около 8 кГц. Убедившись в работоспособности этого узла проверяем генератор на намкросхеме К561ЛА7. С выхода генератора должны поступать симетричные прямоугольные импульсы, чатота которых, в зависимости от положения движка переменного резистора «обороты» должна быть в пределах от 30 до 500 Гц.
Теперь разбираемся в микросхемой К561ИЕ8 — с ее помощью осуществляется формирование фазных управляющих импульсов. Данная микросхема представляет из себя десятичный счетчик, формирующий последовательно на каждом выходе сигнал логической «1» по спаду тактового импульса. Для проверки правильности работы этой микросхемы и монтажа, в задающем генераторе вместо конденсатора номиналом 10n временно устанавливаем конденсатор 1 мкф. Включаем устройство и смотрим на светодиоды, подключенные к выходам микросхемы К561ИЕ8. При исправной микросхеме должны последовательно зажигаться светодиоды с 1 по 6 и так по кругу. В работающем устройстве, естественно, все диоды будут просто светиться т.к. глаз человека не в состоянии видеть сигнал частотой выше 25 Гц. Все светодиоды должны светиться с одинаковой яркостью. В случае обрыва обмотки импульсного трансформатора, неисправности транзистора и т.д. диод светиться не будет или будет светиться в «пол накала». Именно поэтому в схеме вместо диодов используются светодиоды — для удобства отладки. Убедившись, что все в порядке, убираем конденсатор из генератора на 1 мкф. Включаем устройство и регулируем переменным резистором частоту тактового генератора. При наименьшей частоте светодиоды будут немного мерцать (особенно хорошо это видно боковым зрением) а при максимальной — светиться. При этом, работающая схема будет издавать характерный «писк», что свидетельсвует о том, что в первичные обмотки импульсных трансформаторов поступают управляющие импульсы.
Убедившись, что все в порядке, убираем конденсатор из генератора на 1 мкф. Включаем устройство и регулируем переменным резистором частоту тактового генератора. При наименьшей частоте светодиоды будут немного мерцать (особенно хорошо это видно боковым зрением) а при максимальной — светиться. При этом, работающая схема будет издавать характерный «писк», что свидетельсвует о том, что в первичные обмотки импульсных трансформаторов поступают управляющие импульсы.
Разбираемся с управляющими сигналами тиристоров. Еще раз проверяем разводку вторичных обмоток импульсных трансформаторов. Если все сделано правильно фазируем трансформаторы. Для этого «отвязываем» корпус осциллографа от земли и проверяем сигнал в цепи управляющего электрода каждого тиристора. Землю осциллографа «крокодилом» цепляем к катоду исследуемого тиристора, а щуп подключаем к управляющему электроду. На экране должны присутствовать пакеты импульсов ПОЛОЖИТЕЛЬНОЙ полярности (см. осцилограмму в начале файла) амплитудой не менее 5V. Так нужно последовательно проверить все теристоры с схеме. На всех должен присутствовать управляющий сигнал. Закончив с этим, можно начать подавать питание на силовую часть схемы.
Так нужно последовательно проверить все теристоры с схеме. На всех должен присутствовать управляющий сигнал. Закончив с этим, можно начать подавать питание на силовую часть схемы.
Важное замечаение. Помните, что импульсная техника не прощает ошибок! Если что-то пойдет не так, огромная энергия запасенная электролитическим конденсатором большой емкости вынесет тиристоры — сразу несколько штук. Будет примерно следующее:
А всего-то делов: причина была в дребезге контактов в переменном резисторе подстройки оборотов. В какой-то момент цепь обрывалась, частота тут-же возрастала в несколько раз, схема тут-же захлебавалась. Сквозные токи от источника питания (электролитического конденсатора) перли через тиристоры. Неравный бой между тиристорами и электролитическим конденсатором большой емкости всегда заканчивался победой последнего, результат — на картинке. В догонку, вынесло еще TL 494 в инверторе и мосфет IRF 1010. Печально, такой ущерб из-за коппечной детали. И хороший урок.
Теперь переходим к самому интересному. Подаем на силовую часть сначала низковольтное питание от источника 12-24V через лампу на 5 Вт. Включаем сначала блок управления, ставим минимальную частоту оборотов. Далее, плавно поднимаем напряжение питания силовой части до 15-20 V. Смотрим на лампу. Светиться она не должна. Еще лучше, в разрыв питания силовой цепи включить амперметр: в случае нормальной работы устройства (работают контуры всех трех фаз) ток составит несколько миллиампер при таком напряжении питания и минимальной частоте. Если ток значительно больше (горит или светится в пол накала лампа) прут сквозные токи через схему. Если тока нет вообще — тиристоры не открываются. В случае нормального тока смотрим что происходит на конденсаторах. Сигнал должен быть примерно такой:
Так нужно проверить все 3 фазы. Наличие такого сигнала свидетельствует от том, что схема работает. Теперь искуственно вводим схему в режим захлебывания чтобы определить примерную максимальную чатоту тактового генератора. Для этого плавно увеличиваем частоту и смотрим на лампу. Как только лампа загорится — схема захлебнулась. При низком напряжении питания это не страшно — токи при таком напряжении не смертельны для тиристоров. Измеряем частоту генератора в этом случае. У меня получилось около 500 Гц т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты при которой наступает захлебывание несколько меньше. Определив предельную частоту можно начать подачу высокого напряжения на силовую часть.
Для этого плавно увеличиваем частоту и смотрим на лампу. Как только лампа загорится — схема захлебнулась. При низком напряжении питания это не страшно — токи при таком напряжении не смертельны для тиристоров. Измеряем частоту генератора в этом случае. У меня получилось около 500 Гц т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты при которой наступает захлебывание несколько меньше. Определив предельную частоту можно начать подачу высокого напряжения на силовую часть.
Включаем генератор, ставим минимальную частоту. Включаем инвертор и плавно увеличиваем напряжение на его выходе. Следим за током потребляемым устройством. Он должен начать расти по мере увеличения напряжения на выходе инвертора. Одновременно, смотрим напряжение на выходе инвертора. Если все идет хорошо, при 50 V двигатель начнет гудеть, при 150 V вал тронется, при 200 V начнет уверенный набор оборотов. Далее, наступит вход в режим синхронизации, гул и гудение снизится, а ток в цепи батареи составит около 3А. Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут-же упадет до 4.5 А после набора оборотов. Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током.
Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут-же упадет до 4.5 А после набора оборотов. Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током.
Для контроля оборотов и формы сигнала на фазе следует поключить к одному из фазных конденсаторов через резистор на 10 мОм щуп осциллографа и через резистор на 500 кОм частотомер (китайский мультиметр поддерживающий измерение частоты). Далее, следя за формой сигнала можно увеличить частоту до 100 Гц или выше, пока схема не захлебнется. Это нужно делать с осторожностью (см. выше) т.к. в этом случае сквозными токами вынесет тиристоры. Как показала практика, двигатель легко раскрутить до двойной частоты на каждой фезе, но делать этого все-же не стоит.
Вопросы, пожелания?
Пишите [email protected]
Эффективный источник питания асинхронного двигателя
Description
Переработка схемы генератора импульсов (вместо логики используется Attiny13) + инвертора 12-220 В DC-DC + силовой части для управления вращением асинхронного двигателя. Планируется использовать для электро-велосипеда.
Копию оригинальной статьи, на основе которой создан проект, можно почитать здесь
https://eurosamodelki.ru/katalog-samodelok/alternativnaja-energetika/effektivnii-istochnik-pitanija-asinhronnogo-dvigatelja
Design Drawing
schematic diagram
( 1 / )
PCB
( 1 / )
Empty
| ID | Designator | Footprint | Quantity | |
|---|---|---|---|---|
| 1 | 1u | C1,C2 | C0603 | 2 |
| 2 | 0.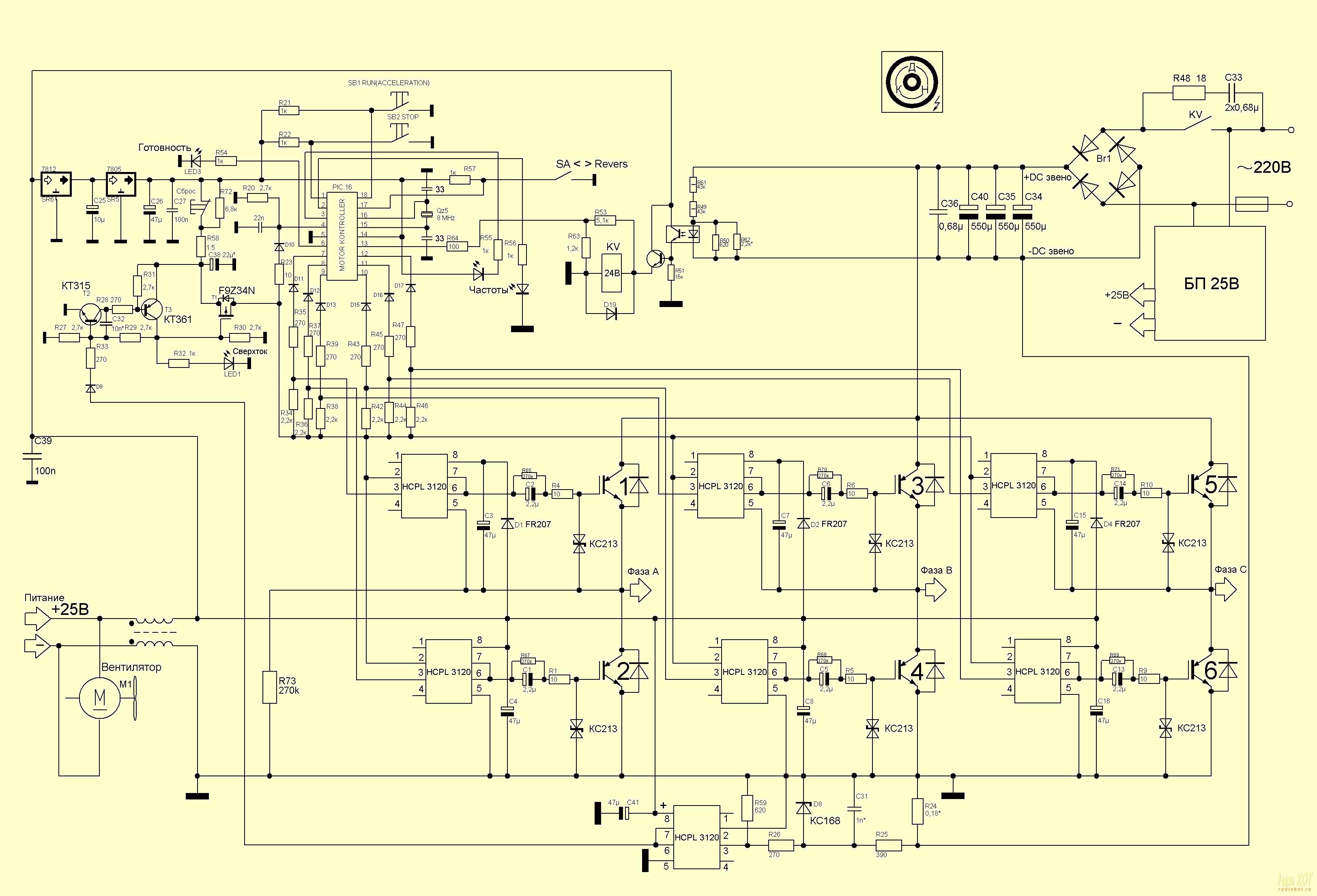 1u 1u | C3 | C0603 | 1 |
| 3 | HDR-M-2.54_1x1 | J1,J2,J3,J4,J5,J6 | HDR-M-2.54_1X1 | 6 |
| 4 | MOSI | J7 | HDR-M-2.54_1X1 | 1 |
| 5 | MISO | J8 | HDR-M-2.54_1X1 | 1 |
| 6 | SCK | J9 | HDR-M-2.54_1X1 | 1 |
| 7 | VCC | J10 | HDR-M-2. 54_1X1 54_1X1 | 1 |
| 8 | GND | J11 | HDR-M-2.54_1X1 | 1 |
| 9 | RST | J12 | HDR-M-2.54_1X1 | 1 |
| 10 | MMBT3904-C20526 | Q1,Q2,Q3,Q4,Q5,Q6 | SOT-23-3_L2.9-W1.3-P1.90-LS2.4-BR | 6 |
| 11 | 130 | R1,R2,R3,R4,R5,R6 | R0603 | 6 |
| 12 | 50 | R7 | R0603 | 1 |
| 13 | 5k | RP1 | RES-ADJ-TH_3386P | 1 |
| 14 | MCP1703T-5002E/CB | U2 | SOT-23-3_L2. 9-W1.3-P1.90-LS2.4-BR 9-W1.3-P1.90-LS2.4-BR | 1 |
| 15 | ATTINY13A-SU | U4 | SOIC-8_L5.3-W5.3-P1.27-LS8.0-BL | 1 |
| 74HC4024D,653 | U5 | SOP-14_L8.6-W3.9-P1.27-LS6.0-BL | 1 | |
| 17 | 1000 | C4 | RAD-0.1 | 1 |
| 18 | 0.22u | C5,C7 | RAD-0.1 | 2 |
| 19 | 1000uF | C6 | CAP-TH_BD10. 0-P5.00-D1.0-FD 0-P5.00-D1.0-FD | 1 |
| 20 | 470u | C8 | CAP-D3.0×F1.5 | 1 |
| 21 | 1N4148 | D1,D2 | DO-35_BD2.0-L4.0-P8.00-D0.5-FD | 2 |
| 22 | GBJ2510F | D3 | PB-TH_4P-L30.0-W4.6 | 1 |
| 23 | 1m | L1 | L0603 | 1 |
| 24 | LED-TH-5mm_R | LED7 | LED-TH_BD5.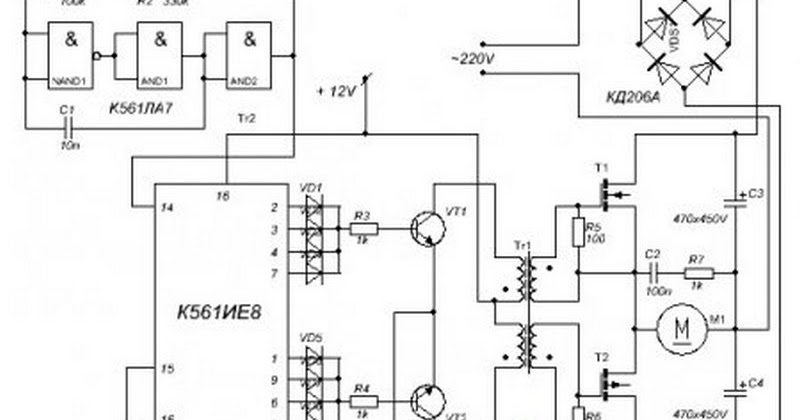 0_RED 0_RED | 1 |
| 25 | BC558B | Q7,Q8 | TO-92-3_L4.9-W3.7-P1.27-L | 2 |
| 26 | IRF1010EZPBF | Q9,Q10 | TO-220AB-3_L10.3-W5.0-P2.54-L | 2 |
| 27 | 1.7k | R13 | R_AXIAL-0.3 | 1 |
| 28 | 2.6k | R14 | R_AXIAL-0.3 | 1 |
| 29 | 10k | R15 | R_AXIAL-0. 3 3 | 1 |
| 30 | 1k | R16,R17,R18 | R_AXIAL-0.3 | 3 |
| 31 | 10 | R19,R20 | R_AXIAL-0.3 | |
| 32 | 1k | RP2 | RES-ADJ-TH_3386P | 1 |
| 33 | TL494CN | U1 | DIP-16_L19.3-W6.4-P2.54-LS7.6-BL | 1 |
Unfold
Project Attachments
Project Members
0
0
Collect to album
Loading. ..
..
Do you need to add this project to the album?
Forked project will be set private in personal workspace. Do you continue?Send message to vladimir.lozhnikov
- Fold
我要咨询
我要咨询
800821856
服务时间
周一至周五 9:00~18:00
- 0755 — 2382 4495
- 153 6159 2675
服务时间
周一至周五 9:00~18:00
立创EDA微信号
easyeda
QQ交流群
664186054
立创EDA公众号
lceda-cn
КПД асинхронного двигателя, коэффициент мощности и механическая нагрузка
Теги блога
- 110–220 В,
50Гц 60Гц,
Источник питания переменного тока постоянного тока,
приводы переменного тока,
Источник питания переменного тока,
Основы,
Кабель,
ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ,
преобразователь частоты,
Генератор,
Заземление,
гармоники,
Как,
Индукционный двигатель,
инверторы,
Блок управления двигателем,
Реле,
От одной фазы к трем фазам,
Мягкий старт,
Трансформер,
Поиск неисправностей,
UPS,
Приводы с регулируемой скоростью,
ЧРП,
Вики,
Категории
Преобразователи частоты
Преобразователи частоты
Силовые инверторы
Преобразователи напряжения
Устройства плавного пуска
Рекомендовать
- Дом
- Блог
- КПД асинхронного двигателя, коэффициент мощности и механическая нагрузка
Пятница, 5 июня 2015 г.
1. Объясните, почему КПД асинхронного двигателя увеличивается при увеличении механической нагрузки.
2. Объясните, почему коэффициент входной мощности асинхронного двигателя увеличивается при увеличении механической нагрузки.
Объяснить:
1. Эффективность индукции увеличивается при увеличении механической нагрузки, так как при увеличении нагрузки двигателя увеличивается его скольжение, а скорость вращения ротора падает. Поскольку скорость ротора ниже, между ротором и магнитными полями статора в машине больше относительного движения. Большее относительное движение создает более сильное напряжение ротора, которое, в свою очередь, создает больший ток ротора. При большем токе ротора увеличивается и магнитное поле ротора. Увеличение магнитного поля ротора приводит к увеличению общего крутящего момента, индуцируемого в двигателе. В конечном счете, асинхронные двигатели более эффективны, когда их скорость близка к синхронной, т. е. крутящий момент близок к синхронной скорости.
2. Входной коэффициент мощности индукции увеличивается при увеличении механической нагрузки, потому что, как правило, чем выше сопротивление (нагрузка), тем выше коэффициент мощности. Более высокий коэффициент мощности означает, что имеется отвод электроэнергии в пересчете на активную мощность. А большая активная мощность означает более высокую механическую мощность для компенсации возрастающего сопротивления ротора.
Теги: Индукционный двигатель , Основы
Постоянный магнит против асинхронного двигателя: крутящий момент, потери, материал
Поскольку электрификация автомобилей продолжается ускоренными темпами, многие задаются вопросом, какой тип двигателя лучше всего подходит для современной электрической трансмиссии.
Может ли это быть трехфазный асинхронный двигатель или двигатель с постоянными магнитами? Оба двигателя в настоящее время используются в электромобилях. Оба обеспечивают высокую эффективность и надежную работу. Но что лучше?
Оба обеспечивают высокую эффективность и надежную работу. Но что лучше?
Есть веский аргумент в пользу того, что двигатель с постоянными магнитами лучше к асинхронному двигателю. Неотъемлемые преимущества порошковой металлургии — потенциал для повышения производительности двигателя и снижения общей стоимости — могут быть эффективным инструментом в производстве этих приводных систем.
Давайте проведем несколько сравнений эффективности асинхронных двигателей и двигателей с постоянными магнитами, чтобы увидеть их преимущества и потенциальные недостатки:
- Стоимость
- КПД — крутящий момент, потери в сердечнике, управление частотой и скоростью двигателя
- Материальные возможности
- Использование
Мелкие детали конструкции электродвигателя более сложны, чем описано ниже, но это отличный старт для тех, кто взвешивает усовершенствование конструкции:
Эффективность двигателя с постоянными магнитами и асинхронного двигателя
ускоренными темпами, многие задаются вопросом, какой тип двигателя лучше всего подходит для современной электрической трансмиссии.
Может ли это быть трехфазный асинхронный двигатель или двигатель с постоянными магнитами? Оба двигателя в настоящее время используются в электромобилях. Оба предлагают высокую эффективность и хорошую производительность. Но что лучше?
Существует веский аргумент в пользу того, что двигатель с постоянными магнитами превосходит асинхронный двигатель. Таким образом, текущие и новые конструкции переходят на конструкцию двигателя с постоянными магнитами. Неотъемлемые преимущества порошковой металлургии — потенциал для повышения производительности двигателя и снижения общей стоимости — могут быть эффективным инструментом в производстве этих приводных систем.
Давайте проведем несколько сравнений эффективности асинхронных двигателей и двигателей с постоянными магнитами, чтобы увидеть их преимущества и потенциальные недостатки. Мелкие детали конструкции электродвигателя более сложны, чем описано ниже, но это отличный старт для тех, кто взвешивает свои варианты.
Эффективность двигателя с постоянными магнитами
Как следует из названия, в двигателе с постоянными магнитами EV используются постоянные магниты на роторе (см. рисунок ниже). Переменный ток, подаваемый на статор, приводит во вращение ротор. Поскольку магниты намагничены постоянно, ротор вращается синхронно с переменным током переключения. Проскальзывание, необходимое в асинхронных двигателях, устранено, повышает вашу механическую и тепловую эффективность.
Присущий КПД двигателя с постоянными магнитами выше, чем у асинхронного двигателя. Оба двигателя используют трехфазную конструкцию для полной оптимизации производительности. Однако асинхронные двигатели изначально были рассчитаны на работу на частоте 60 Гц. При увеличении частоты общие потери в асинхронных двигателях будут намного больше, чем в двигателях с постоянными магнитами (в частности, в двигателях, использующих технологию SMC).
Независимо от того, как вы изготовите асинхронный двигатель, хорошо спроектированный синхронный двигатель с постоянными магнитами обеспечит увеличенный диапазон, лучшую производительность, что подразумевает более высокий КПД.
Двигатель с постоянными магнитами Материал Применение
( Сравнение конструкции асинхронного двигателя переменного тока и двигателя с постоянными магнитами)
В двигателе с постоянными магнитами может ли ротор быть цельным куском или набором более тонких пластин, каждая из которых имеет магниты определенной длины? Ротор минимизирует зубчатый крутящий момент. В этой конструкции двигателя используются самые лучшие технологии как SMC, так и магнитомягких (SSM).
Концепция интенсивного двигателя из порошкового металла/SMC устраняет необходимость в пластинах из электротехнической стали , улучшая общую производительность, устраняя сложности в цепочке поставок и максимально используя материалы.
Использование постоянных магнитов в двигателях
Постоянный двигатель мощностью 50 кВт (около 70 л.с.) обычно весит менее 30 фунтов. (Обратите внимание, что вам все равно потребуется преобразователь постоянного тока в переменный, чтобы генерировать достаточное напряжение и частоту. )
)
Использование двигателей с постоянными магнитами в автомобильной промышленности включает Ford Mustang Mach-E, платформы Ultium, все модели Tesla и список продолжает расти.
Скорость двигателя с постоянными магнитами всегда выше, чем у его асинхронного аналога из-за присущего ему проскальзывания. Скорость может быть представлена следующим уравнением:
- Ns = 120 * частота / количество полюсов
(Ns — синхронная скорость. Количество полюсов — это общее количество полюсов на фазу, включая северный и южный полюса.)
Cost Vs. Производительность
Одним из основных соображений, касающихся двигателей с постоянными магнитами, является стоимость магнитов. Если вы использовали высокоэнергетические магниты (например, железо-неодим-бор), вы почувствовали боль в своем бюджете (или ваш босс). Возможные потери при штамповке материала для ламинирования только усугубляют проблему.
Возможности для порошковой металлургии изобилуют этими типами двигателей. Роторы двигателя с постоянными магнитами могут быть изготовлены из спеченного порошкового металла, независимо от того, какой метод проектирования вы выбрали: внутренний или внешний. Статор также может быть изготовлен из магнитомягких композитов. При ожидаемых высоких частотах переключения потери в SMC ниже, чем в многослойном 3% кремниевом железе , что еще больше повышает эффективность этой конструкции. Проще говоря, магнитомягкие композиты созданы специально для высоких частот.
Роторы двигателя с постоянными магнитами могут быть изготовлены из спеченного порошкового металла, независимо от того, какой метод проектирования вы выбрали: внутренний или внешний. Статор также может быть изготовлен из магнитомягких композитов. При ожидаемых высоких частотах переключения потери в SMC ниже, чем в многослойном 3% кремниевом железе , что еще больше повышает эффективность этой конструкции. Проще говоря, магнитомягкие композиты созданы специально для высоких частот.
Металлический порошок может повысить эффективность двигателя с постоянными магнитами по сравнению с асинхронным двигателем. Возможности трехмерного формообразования в порошковой металлургии позволяют формировать статор так, чтобы вся проволока была полностью заключена в магнитомягкий композит, чтобы исключить потери на конце витка. .
Это лишь некоторые из многих преимуществ, которые предлагает порошковый металл — как спеченный магнитомягкий материал, так и SMC.
Эффективность трехфазного асинхронного двигателя переменного тока
Исторически Никола Тесла задумал асинхронный двигатель в 1883 году. По сути, это та же базовая конструкция статора, что и у постоянного двигателя, за исключением улучшенного сырья.
По сути, это та же базовая конструкция статора, что и у постоянного двигателя, за исключением улучшенного сырья.
Основной принцип работы асинхронного двигателя заключается в том, что магнитное поле, создаваемое в статоре, создает противоположный ток в стержнях ротора. Затем индуцированный ток ротора создает магнитное поле в пластинах ротора. Это противодействующее поле заставляет ротор вращаться — при переключении тока статора ротор всегда отстает и заставляет ротор вращаться.
Преимущество этого наведенного магнитного поля заключается в том, что щетки и обмотка ротора не нужны. Двигатели этого типа:
- Надежные
- Прочный
- Не требует особого ухода
Выше приведена типичная конфигурация асинхронного двигателя. Обратите внимание, что ротор имеет пластины в сердечнике и электропроводящий материал (медь или алюминий) в пазах ротора, так называемые стержни ротора.
Для большинства промышленных применений (более 1 л.с.) и для автомобильных трансмиссий трехфазный асинхронный двигатель настолько распространен, насколько это возможно. В этой конструкции три фазы намотаны на статор таким образом, что обеспечивается более плавная работа и высокая эффективность. Трехфазные двигатели переменного тока запускаются автоматически при подаче напряжения на обмотки статора. Во многих случаях так называемые стержни ротора расположены под углом для обеспечения более высокого крутящего момента.
Эффективность асинхронного двигателя переменного тока на практике
Трехфазное использование в промышленных приложениях относительно просто, поскольку входное напряжение уже является трехфазным. Однако в автомобильных приложениях вам необходимо преобразовать питание постоянного тока батареи в трехфазное питание переменного тока. Это происходит через преобразователь постоянного тока в переменный.
При работе с асинхронными двигателями переменного тока необходимо учитывать скорость вращения ротора относительно частоты поступающего переменного тока. Первоначально это определяется так называемой синхронной скоростью. Для асинхронного двигателя переменного тока синхронная скорость рассчитывается следующим образом:
Первоначально это определяется так называемой синхронной скоростью. Для асинхронного двигателя переменного тока синхронная скорость рассчитывается следующим образом:
- Ns = 120 * частота / количество полюсов
(Помните, Ns — это синхронная скорость. Число полюсов — это общее число полюсов на фазу, включая северный и южный полюса.)
Для двухполюсного асинхронного двигателя переменного тока, работающего на частоте 60 Гц, скорость будет 3600 об/мин. Однако, если бы ротор вращался со скоростью 3600 об/мин в этой конфигурации, у вас был бы нулевой крутящий момент от двигателя. В идеале должно быть некоторое проскальзывание ротора относительно частоты; обычно это около 5%. Таким образом, эти двигатели считаются асинхронными двигателями.
КПД трехфазных асинхронных двигателей может варьироваться от 80% до 90%.
(типичная зависимость крутящего момента от скольжения для асинхронных двигателей переменного тока — любезно предоставлено All About Circuits )
Некоторые асинхронные двигатели Tesla модели утверждают, что весят всего 70 фунтов. и может генерировать 360 л.с. при 18 000 об/мин. Общий вес двигателя и инвертора составляет около 350 фунтов. — все еще намного легче, чем средний двигатель внутреннего сгорания.
и может генерировать 360 л.с. при 18 000 об/мин. Общий вес двигателя и инвертора составляет около 350 фунтов. — все еще намного легче, чем средний двигатель внутреннего сгорания.
Этот двигатель представляет собой трехфазную конструкцию с восемью полюсами на группу, что означает, что частота переменного тока, используемая для выработки этой мощности, составляет около 1200 Гц. На этих рабочих частотах вихретоковый нагрев материала ламината будет достаточно высоким. Этот автомобильный двигатель Tesla требует значительного охлаждения, чтобы предотвратить его перегрев.
Стоимость асинхронных двигателей
Основным преимуществом асинхронных двигателей переменного тока для электромобилей является стоимость. Их относительно дешево построить.
В индукционных конструкциях переменного тока используются стальные пластины как в статоре, так и в роторе; их можно штамповать почти одновременно из одного и того же листа материала. Другими словами, уровень брака намного ниже, чем в среднем по штамповке.
Другими словами, уровень брака намного ниже, чем в среднем по штамповке.
Индукция Против. Эффективность двигателей с постоянными магнитами: победителем становится …
Несмотря на преимущества использования магнитомягких материалов в двигателях с постоянными магнитами (SMC менее распространены в асинхронных конструкциях) выбрать тип двигателя для вашей трансмиссии сложно. У каждого есть преимущества и недостатки.
Несмотря на то, что асинхронный двигатель переменного тока был впервые разработан более 100 лет назад, он по-прежнему актуален благодаря повышению эффективности и производительности в 20-м и 21-м веках. Двигатель с постоянными магнитами является относительным новичком, но обещает более высокую производительность, более высокую плотность крутящего момента и меньший вес.
Основным камнем преткновения при использовании двигателей с постоянными магнитами является потенциально высокая стоимость магнитов. К счастью, на горизонте есть многообещающие разработки, которые могли бы устранить этот недостаток.