Регулятор давления конденсации РДК 8.4
Регулятор давления конденсации предназначен для обеспечения работоспособности систем кондиционирования воздуха в режиме охлаждения при температуре окружающей среды до –30°С.
РДК 8.4 официально заявлен Европейским представительством MITSUBISHI ELECTRIC в Москве.
Прибор помогает эффективно поддерживать давление конденсации на номинальном уровне, независимо от изменений температуры окружающей среды и обеспечивает сохранение холодопроизводительности системы до 90 % от номинальной.
Микропроцессорная система обеспечивает работоспособность систем кондиционирования, работающих режиме охлаждение либо охлаждение-нагрев номинальной мощностью до 14 кВт, посредством изменения скорости вращения вентилятора наружного блока кондиционера, в зависимости от температуры теплообменника.
Регулятор давления конденсации плавно управляет скоростью вращения скоростью вентилятора в диапазоне 0…100%, имеет индикацию режимов работы, а также индикацию результата самодиагностики исправности термодатчика.
Прибор изначально настроен на оптимальную температуру давления конденсации и оснащен проводами для подключения с клеммами для простого подключения.
Регулятор помогает исключить ряд негативных явлений:
- обмерзание внутреннего блока кондиционера
- риск повреждения деталей 4-х ходового клапана
- превышение допустимой температуры нагнетания компрессора
- увеличение времени переходного процесса в работе кондиционера
Характеристики
|
Модель |
РДК-8.4 |
| Габариты, мм | 105х65х30 |
| Масса, г | 135 |
| Напряжение питания, В | 220 |
| Ток нагрузки макс., А | 3.5 |
| Потребляемая мощность макс., Вт | 0.5 |
| Диапазон рабочих температур | -40. ..+70°С ..+70°С |
| Режим работы | непрерывный |
|
|
|
Реле давления серии РДК для воздушных компрессоров.
|
Реле давления серии РДК предназначены для управления электродвигателем воздушного компрессора в автоматическом режиме по установленным диапазонам давления. Основная задача, которую помогают решить реле РДК – это поддержание необходимого рабочего давления в ресивере компрессора. Рабочая среда: воздух и другие неагрессивные газы. Траб.среды -5…+80 °C. Реле давления серии РДК снабжены:
|
 После включения и разгона электродвигателя обратный клапан запирается нагнетаемым давлением, обеспечивая таким образом легкий (разгруженный) запуск компрессора из выключенного состояния.
После включения и разгона электродвигателя обратный клапан запирается нагнетаемым давлением, обеспечивая таким образом легкий (разгруженный) запуск компрессора из выключенного состояния.(1) — у реле давления серии РДК-xT10P-x вместо символа «ON» нанесен символ «AUTO».
Для ввода реле серии РДК в эксплуатацию необходимо:
- Подключить реле к ресиверу компрессора через порт G1/4”.
- Для реле с четырьмя портами установить манометр, если это необходимо, а неиспользуемые порты закрыть заглушками, например заглушкой FESTO B-1/4-50 (арт.
 F534214) или QSC-F-G1/4-I (арт. F556858).
F534214) или QSC-F-G1/4-I (арт. F556858). - При необходимости подключить разгрузочный клапан к компрессору для облегчения его запуска. Если компрессор не требует подключения разгрузочного клапана, то разгрузочный клапан реле давления не подключается к компрессору.
- Подключить цепи управления электродвигателем к контактам реле (напрямую(2) или через сетевой контактор).
- Настроить верхний и нижний порог срабатывания с помощью регулировочных винтов под крышкой реле, если Ваше рабочее давления отличается от заводской настройки реле.
(2) — перед подключением убедитесь, что ток потребления электродвигателя не превышает максимально допустимый ток контактов реле.
Технические характеристики реле давления серии РДК:
| Наименование | Фото | Pраб. max maxбар |
Диапазон настройки, бар |
Заводская настройка, бар(3) | Дифференциал, бар | Кол-во портов, (резьба) |
Кол-во и тип контактов |
Мощность контактов, А для категории применения нагрузки АС-3 (трехфазные эл. двигатели) |
Ø разгрузочного клапана, мм |
| Тип конструктивного исполнения корпуса 10 с выключателем «Рычаг» | |||||||||
| РДК-1Т10Р-1 | 7 | 2…7 | 4…6 | 1,5…2,5 | 1 порт (1/4” NPT внутр.  ) ) | 2 NC | 12 А / 240 VAC | 6 | |
| РДК-1Т10Р-2/6,5 | 10,5 | 2,5…10,5 | 6…8 | 2…3 | 1 порт (1/4” NPT внутр.) |
2 NC | 12 А / 240 VAC | 6,5 | |
| РДК-4Т10Р-1 | 6,5 | 2…6,5 | 4…6 | 1,5…2,5 | 4 порта (1/4” NPT внутр.) |
2 NC | 12 А / 240 VAC | 6 | |
| Тип конструктивного исполнения корпуса 10 с выключателем «Кнопка» | |||||||||
| РДК-1Т10К-2 | 12 | 3…12 | 6…8 | 2…3 | 1 порт (1/4” NPT внутр.  ) ) |
2 NC | 20 А / 240 VAC | 6 | |
| РДК-4Т10К-2 | 12 | 3…12 | 6…8 | 2…3 | 4 порта (1/4” NPT внутр.) |
2 NC | 20 А / 240 VAC | 6 | |
| РДК-1Т18П-2 | 11 | 3…11 | 6…8 | 1,4…4 | 1 порт (1/4” NPT внутр.) |
3 NC | 16 А / 400 VAC | 6 | |
| РДК-1Т18П-3 | 16 | 4…16 | 8…10 | 1,8…4,5 | 1 порт (1/4” NPT внутр.  ) ) |
3 NC | 16 А / 400 VAC | 6 | |
| РДК-4Т18П-2 | 11 | 3…11 | 6…8 | 1,4…4 | 4 порта (1/4” NPT внутр.) |
3 NC | 16 А / 400 VAC | 6 | |
| Тип конструктивного исполнения корпуса 19 с выключателем «Переключатель» | |||||||||
| РДК-1Т19П-1 | 11 | 2…11 | 4…6 | 2…4 | 1 порт (1/4” NPT внутр.) |
2 NC | 16 А / 250 VAC | ||
(3) — реле давления серии РДК поставляются с уже настроенными, наиболее часто используемыми порогами срабатывания (4. ..6, 6…8 и 8…10 бар).
..6, 6…8 и 8…10 бар).
Монтаж реле давления серии РДК:
|
Рис.1 Установка реле давления серии РДК на компрессор. |
|

Настройка порогов срабатывания реле давления серии РДК:
Для настройки верхнего и нижнего порогов срабатывания необходимо снять крышку реле и, ориентируясь на показания манометра, установить сначала верхний порог срабатывания (значение давления в ресивере, при котором компрессор отключается), затем нижний порог срабатывания (значение давления в ресивере, при котором компрессор включается). Для настройки порогов срабатывания используются регулировочные винты с пружинами (см. таблицу ниже).
| Модель реле | Возможность настройки дифференциала | Регулировочные винты |
| РДК-хТ10Р-х | Настраиваемый | |
| РДК-хТ10К-х | Фиксированный | |
| РДК-хТ18х-х | Настраиваемый | |
| РДК-хТ19х-х | Настраиваемый |
Использование дополнительного оборудования с 4-х портовыми реле давления РДК-4Тххх-х:
-
Внешний вид реле давления серии РДК с четырьмя портами:
Рис.
 2 Внешний вид реле давления с 4-мя портами.
2 Внешний вид реле давления с 4-мя портами. -
Пример установки дополнительного оборудования:
Рис. 3 Пример установки дополнительного оборудования (манометр и заглушка).
-
Перечень дополнительного оборудования совместимого с реле давления серии РДК:
Манометры:
| Артикул | Наименование | Фото |
| F162838 | MA-50-10-1/4-EN Манометр | |
| F162839 | MA-50-16-1/4-EN Манометр |
Заглушки:
| Артикул | Наименование | Фото |
| F534214 | B-1/4-50 Заглушка по DIN 908, с фторопластовым уплотнительным кольцом | |
| F578407 | NPQH-BK-G14-P10 Заглушка с уплотнительным кольцом FPM, резьба G1\4″ |
Схемы подключения реле давления серии РДК:
Для работы с трехфазной нагрузкой рекомендуется использовать реле давления РДК-хТ18П-х, т. к. данная модель реле имеет три контакта и способно коммутировать три фазы одновременно.
к. данная модель реле имеет три контакта и способно коммутировать три фазы одновременно.
Для работы с однофазной нагрузкой рекомендуется применять реле давления РДК-хТ10Р-х, РДК-хТ10К-х и РДК-хТ19П-х, т.к. данные модели имеют по две группы контактов.
Допускается использование реле давления РДК-хТ10Р-х, РДК-хТ10К-х и РДК-хТ19П-х с трехфазной нагрузкой, но при использовании такой схемы, когда реле выключено, одна фаза остается постоянно подключенной к нагрузке и нагрузка полностью не отключается от питающей сети.
Рис. 4 Схема подключения однофазной нагрузки к реле давления серии РДК.
Рис. 5 Схема подключения трехфазной нагрузки к реле давления серии РДК.
Габаритные размеры реле давления серии РДК:
|
РДК-1Т10Р-1, РДК-1Т10Р-2/6,5
|
РДК-4Т10Р-1
|
РДК-1Т10К-2
|
|
РДК-4Т10К-2
|
РДК-1Т18П-2, РДК-1Т18П-3
|
РДК-4Т18П-2
|
|
РДК-1Т19П-1 |
Расшифровка обозначения реле давления серии РДК:
Районный Дом культуры Чучковского муниципального района
Мы рады приветствовать Вас на сайте
МБУК «РДК Чучковского муниципального района»
Надеемся, что наш сайт будет полезен и интересен для вас!
Странички сельских Домов культуры в соцсетях
АВАНГАРДСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
АЛАДЬИНСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
ЗАВИДОВСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
КИСТЕНЕВСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
КДЦ «РУСЬ»
ОСТРО — ПЛАСТИКОВСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
ПЕРТОВСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
ШЕМЕТОВСКИЙ СЕЛЬСКИЙ ДОМ КУЛЬТУРЫ
Официальный сайт Года памяти и славы.
Новости, информация о мероприятиях Года памяти и славы, официальные документы, полезные ссылки на информационные ресурсы в сфере сохранения исторической памяти, а также реализован интерактивный исторический информационный блок о событиях на фронте, в тылу и на оккупированных территориях.
ВНИМАНИЕ!!!
Информационные материалы по профилактике
коронавирусной инфекции и ОРВИ
Управление Роспотребнадзора по Рязанской области для информирования населения представляет материалы по профилактике заболеваний, вызываемых коронавирусами, подготовленные и размещенные на сайте ФБУЗ «Центр гигиенического образования населения» Роспотребнадзора (cgon.rospotrebnadzor.ru)
Памятка
Грипп коронавирус и другие орви общее
Гигиена при гриппе, коронавирусной инфекции и других орви
Грипп, коронавирус, орви — поможет маска
МБУК «РДК Чучковского муниципального района»
391420, Российская Федерация, Рязанская область, р. п. Чучково
п. Чучково
ул. Почтовая д. 4
Телефон: 8 (49138) 7-13-07,
E-mail:[email protected]
Режим работы:
Понедельник — пятница с 8:00 до 17:00
Обед: с 12:00 до 13:00
Выходные дни: суббота, воскресенье
Директор: Моськин Геннадий Викторович
Заместитель директора по организационной и методической работе:
Митина Светлана Сергеевна
Специалист по жанрам творчества:
Ярыгина Марина Евгеньевна
Министерство культуры и туризма Рязанской области
https://kkt.ryazangov.ru/
Рязанский областной научно-методический
центр народного творчества
http://cnt-ryazan. ru/
ru/
Администрация
Чучковского
муниципального района
https://adm-chuchkovo.ru/
АНАЛИЗ
: Новые угольные электростанции мощностью 4 ГВт в Германии проходят испытания после первого пожара
Пять новых угольных электростанций в Германии общей мощностью около 4 ГВт за последние недели «впервые загорелись» и будут вырабатывать электроэнергию на этапе горячих испытаний в течение следующих нескольких месяцев, согласно исследованию Platts. из пяти операторов завода. Эти проекты включают в себя блок Hamm D RWE (800 МВт), RDK 8 EnBW (912 МВт), первый блок Vattenfall в Гамбург-Мурбург (840 МВт), блок Steag Walsum 10 (725 МВт) и новую угольную электростанцию GDF Suez в г. Вильгельмсхафен (800 МВт).
아직 가입 하지 않으 셨나요?
일일 이메일 알림 과 구독자 노트 를 받고 이용 경험 설정 하세요.
Новая угольная электростанция Trianel мощностью 750 МВт в Люенене уже работает и будет сдана в эксплуатацию в третьем квартале.
По данным RWE Generation, проект нового строительстваRWE мощностью 1,6 ГВт в Хамме уже находится на стадии испытаний после «первого возгорания» 30 мая и второго энергоблока. пресс-секретарь Стефани Шунк.Компания Steag заявила, что блок Walsum 10 уже вырабатывает электроэнергию, добавив, что 10 июня в сеть было подано 175 МВт электроэнергии с дальнейшими испытаниями на разных уровнях мощности в ближайшие недели.
ПроектVattenfall в Гамбурге-Мурбурге также вступает в заключительную фазу испытаний после «первого пожара» в конце июля с полной синхронизацией энергосистемы блока B, запланированной на осень, как сообщил Штефан Клеймайер, представитель немецкого подразделения Шведская утилита.
В новом проекте RDK 8 компании
EnBW в Карслруэ также случился «первый пожар» в июне, когда мазут впервые произвел пар, перед дальнейшими испытаниями с углем в ближайшие недели.
Согласно EnBW, энергоблок RDK 8 будет самой эффективной в мире угольной электростанцией с КПД 46%.
Для сравнения, средний отраслевой показатель для угольных электростанций в Германии за последние десятилетия составляет около 35-38%. RWE также заявляет, что чистая эффективность своего завода в Хамме составляет 46%.
При том же производстве электроэнергии для новой электростанции потребуется на 20% меньше угля, что приведет к сокращению выбросов CO2 на 2,5 миллиона тонн в год по сравнению с устаревшими станциями, говорится в сообщении RWE на своем веб-сайте.По словам пресс-секретаря Алексы Шредер, проект GDF Suez в Вильгельмсхафене успешно прошел испытание котла под давлением и должен быть запущен до конца года.
В целом, к 2015 году немецкие операторы электростанций добавят 7,3 ГВт новых угольных мощностей, включая вторые блоки в Хамме и Мурбурге (2014 г.), а также GKM 9 мощностью 900 МВт в Мангейме (2015 г.).
Завод E.ON Datteln 4, который был построен, но который должен повторно подавать заявки на получение разрешения, может добавить еще 1 ГВт до того, как первый ядерный реактор Германии будет отключен к концу 2015 года в соответствии с планом страны по поэтапному отказу от ядерной энергии.
Большинство этих угольных проектов были запланированы почти десять лет назад после того, как Германия впервые решила отказаться от ядерной энергетики. Ряд проектов был отложен из-за проблем с качеством так называемой стали Т24, используемой для котлов. Другие столкнулись с длительными задержками в процессе выдачи экологических разрешений.
В целом, угольные электростанции Германии (включая бурый уголь) обеспечили более 50% спроса на электроэнергию в стране в первой половине этого года, так как выработка электростанций, работающих на природном газе, и ветряных турбин упала, согласно анализу данных. собраны немецким аналитическим центром Фраунгофера.
Только угольные электростанции увеличили производство на 8,5% до 65,8 ТВтч за первые семь месяцев 2013 года, при этом только электростанции, работающие на буром угле, в этом году в Германии вырабатывают больше электроэнергии, как показывают последние данные.
— Андреас Франке, andreas.franke@platts. com
com
— Отредактировал Джонатан Дарт, [email protected]
, Германия намерен закрыть 40% текущей производственной смеси
Федеральный кабинет Германии, январь.29 одобрили общенациональный отказ от выработки угольной энергии к 2038 году, открыв путь для страны, которая уже приступила к отказу от ядерной энергии, чтобы еще больше полагаться на возобновляемые источники энергии.
Утвержденный федеральным кабинетом законопроект «О сокращении и прекращении выработки угольной энергии» ( Gesetz zur Reduzierung und zur Beendigung der Kohleverstromung ) реализует рекомендации, выпущенные в январе 2019 года федеральной комиссией по углю, назначенной в июне 2018 года, и дополняет Правовая база правительства, принятая в августе 2019 года, для поддержки угольных регионов.Ожидается, что федеральный парламент Германии, Бундестаг, примет текст законопроекта к середине 2020 года.
A Капитальный ремонт Законопроект, по сути, определяет, как страна сократит свою долю угольной генерации, которая на конец 2019 года составляла около 29% от ее энергобаланса. Он предполагает, что совокупная мощность электростанций на каменном и буром угле, которая составляла около 44 ГВт в ноябре 2019 года, упадет до 15 ГВт к 2022 году.
Он предполагает, что совокупная мощность электростанций на каменном и буром угле, которая составляла около 44 ГВт в ноябре 2019 года, упадет до 15 ГВт к 2022 году.
В последующие годы будет закрыто больше каменноугольных электростанций по сравнению с бурым углем (или бурым углем, который считается более загрязняющим из-за его более низкой плотности энергии) из-за графиков, связанных с компенсацией угольных генераторов, которые стал камнем преткновения, с которым столкнулась Германия.
Из-за проблем с надежностью — главным образом потому, что Германия восемь лет назад приступила к реализации плана по поэтапному отказу от своего ядерного парка к 2022 году — на данный момент правительство планирует рассмотреть, как отказ от угля влияет на безопасность энергоснабжения, цены на электроэнергию и климатические цели в 2022 году. , 2026, 2029 и 2032. В 2026 году он планирует оценить, можно ли ускорить поэтапный отказ до 2035 года. Однако в его нынешнем виде закон требует закрыть последнюю угольную электростанцию к 2038 году или раньше.
, 2026, 2029 и 2032. В 2026 году он планирует оценить, можно ли ускорить поэтапный отказ до 2035 года. Однако в его нынешнем виде закон требует закрыть последнюю угольную электростанцию к 2038 году или раньше.
Что касается парка бурого угля мощностью 21 ГВт, то электростанции будут выведены из эксплуатации в соответствии с договорными соглашениями с операторами.«Среди прочего, в контракте должно быть согласие оператора на отказ от иска. Если до конца июня 2020 года контракт не будет заключен, федеральное правительство может издать постановление о сокращении и прекращении производства электроэнергии на основе бурого угля », — говорится в заявлении правительства в среду.
Между тем, поэтапный отказ предусматривает более близкий крайний срок до 2026 года, чтобы закрыть весь парк каменного угля мощностью 23 ГВт. В качестве стимула для досрочного закрытия недавно одобренный законопроект устанавливает максимальную компенсацию для производителей каменного угля в размере 165000 евро (182 026 долларов США) / МВт в 2020 году, снижаясь до 155000 евро (170 994 долларов США) / МВт в 2021-2022 годах и к 25 годам. % в год, достигнув 49 000 евро (54 056 долларов США) / МВт в 2026 году, когда прекратятся выплаты.Выбросы углекислого газа в рамках Системы торговли выбросами Европейского Союза (ETS), относящиеся к этим угольным электростанциям, также будут отменены.
% в год, достигнув 49 000 евро (54 056 долларов США) / МВт в 2026 году, когда прекратятся выплаты.Выбросы углекислого газа в рамках Системы торговли выбросами Европейского Союза (ETS), относящиеся к этим угольным электростанциям, также будут отменены.
Законопроект принимает во внимание климатические цели Германии по сокращению выбросов парниковых газов (ПГ) на 55% к 2030 году по сравнению с 1990 годом и подчеркивает значительный поворот в консервативно-социал-демократической коалиции канцлера Ангелы Меркель, которая в 2017 году отказалась от недостижимой цели. Цель на 2020 год.
Между тем, 16 января правительство заключило сделку на сумму более 40 миллиардов евро (44 миллиарда долларов) с угледобывающими регионами в Бранденбурге, Саксонии и Саксонии-Ангальт на востоке и в Северном Рейне-Вестфалии на западе. Компании в этих регионах, в том числе гигантская электростанция RWE (которая закроет две угольные электростанции) и угледобывающую компанию Mibrag, получат по этой сделке 4,35 миллиарда евро.
В заявлении, в котором резко осудили отказ от угля и подчеркнули огромное влияние, которое это окажет на рентабельность и численность персонала, RWE отметила, что, несмотря на гарантии правительства в размере 2 евро.6 миллиардов (2,9 миллиарда долларов) компенсационных выплат в течение следующих 15 лет, он все равно понесет финансовый ущерб в размере около 3,5 миллиардов евро (3,9 миллиарда долларов), включая 500 миллионов евро (551 миллион долларов) в виде специальных списаний на электростанции и карьеры. .
Примечательно, однако, что законопроект допускает неоднозначный ввод в эксплуатацию угольной электростанции Datteln 4 Uniper мощностью 1,1 ГВт, поскольку запуск электростанции был одобрен до того, как был запланирован поэтапный отказ. Проект стоимостью 1,5 миллиарда евро (1,65 миллиарда долларов) может начать работу уже в середине 2020 года.Правительство заявило, что решение о приостановке ввода завода в эксплуатацию «может быть достигнуто только при очень высоких компенсационных выплатах». Было рассмотрено, что поэтапный отказ направлен на сокращение выбросов углерода, а не на отдельных заводах. «Имеет смысл сначала вывести из эксплуатации старые, более неэффективные угольные электростанции, чем не запускать современную электростанцию Datteln IV и выплатить за это высокую компенсацию».
Было рассмотрено, что поэтапный отказ направлен на сокращение выбросов углерода, а не на отдельных заводах. «Имеет смысл сначала вывести из эксплуатации старые, более неэффективные угольные электростанции, чем не запускать современную электростанцию Datteln IV и выплатить за это высокую компенсацию».
«Особые меры предосторожности» для обеспечения надежности и доступности
В частности, Германия планирует приступить к отказу от угля с «особыми мерами предосторожности.Как было отмечено в среду: «Обеспечение того, чтобы энергоснабжение было постоянным и максимально рентабельным, даже во время сокращения и прекращения выработки электроэнергии на основе угля, является важной целью закона».
В среднесрочной перспективе уголь, вероятно, будет «полностью заменен» возобновляемыми источниками энергии, что будет регулироваться отдельно, заявило правительство. Он также попытается заменить тепло, вырабатываемое электростанциями, работающими на угле, путем продления действия Закона о комбинированном производстве тепла и электроэнергии до конца 2029 года, что, вероятно, создаст дополнительные стимулы для систем когенерации на биомассе.
Между тем, если поэтапный отказ приведет к росту цен на электроэнергию, законопроект предусматривает «облегчение» для частных и коммерческих потребителей в виде ежегодной «субсидии стоимости сети», которая будет выплачиваться из средств населения, начиная с 2023 года. Энергоемкие компании могут затем также получать субсидии для компенсации более высоких затрат на электроэнергию. Наконец, работники угольных заводов или карьеров старше 58 лет, потерявшие работу в результате поэтапного отказа, скорее всего, получат корректирующие пособия в качестве «вспомогательной помощи» в течение пяти лет до выхода на пенсию.
Энергетические компании ускоряют отключения, призыв к реформамУтверждение Кабинетом министров законопроекта в среду вызвало немедленные действия со стороны некоторых крупнейших производителей Германии.
Uniper, компания, образованная в 2016 году после отделения от E.ON в ответ на серию сбоев на рынке электроэнергии в Германии, включая Energiewende и отказ от ядерной энергетики, 30 января объявила о закрытии 1. 5 ГВт мощностей каменного угля к концу 2022 года.Эти объекты включают три энергоблока на электростанции Scholven в Гельзенкирхене и электростанцию Wilhelmshaven. Uniper также планирует закрыть еще 1,4 ГВт на электростанциях Staudinger и Heyden не позднее 2025 года. С 2015 года компания уже закрыла 2,4 ГВт, включая блоки на электростанциях Даттельн, Шольвен, Неппер, Вельтхейм и Шемрок.
5 ГВт мощностей каменного угля к концу 2022 года.Эти объекты включают три энергоблока на электростанции Scholven в Гельзенкирхене и электростанцию Wilhelmshaven. Uniper также планирует закрыть еще 1,4 ГВт на электростанциях Staudinger и Heyden не позднее 2025 года. С 2015 года компания уже закрыла 2,4 ГВт, включая блоки на электростанциях Даттельн, Шольвен, Неппер, Вельтхейм и Шемрок.
Uniper заявила, что сейчас разрабатывает «перспективные» схемы замены этой мощности. Усилия будут включать планы «по строительству и эксплуатации новых газовых теплоэлектроцентралей, которые производят централизованное теплоснабжение, разработке инновационных решений для обеспечения близлежащих промышленных потребителей паром, теплом, охлаждением и электричеством, а также разработке решений, которые производят водород в промышленных масштабах », — сказали в компании.
EnBW Energie Baden-Württemberg AG (EnBW) — компания, которая POWER была удостоена награды Top Plant в 2019 году за эксплуатацию одного из самых эффективных угольных энергоблоков в мире RDK8, — отметила одобрение Кабинета министров угля. Закон о выходе предложил «большую ясность в отношении конкретных условий» надвигающегося поэтапного отказа. Однако компания заявила, что некоторые индивидуальные меры и правила «нуждаются в срочном улучшении». Во-первых, в нем указывается, что вопреки пути, определенному федеральной угольной комиссией, закон позволит более старым и углеродоемким установкам по производству бурого угля работать дольше, чем «значительно более современные угольные электростанции с отбором тепла, которые производят меньше выбросов.”
Закон о выходе предложил «большую ясность в отношении конкретных условий» надвигающегося поэтапного отказа. Однако компания заявила, что некоторые индивидуальные меры и правила «нуждаются в срочном улучшении». Во-первых, в нем указывается, что вопреки пути, определенному федеральной угольной комиссией, закон позволит более старым и углеродоемким установкам по производству бурого угля работать дольше, чем «значительно более современные угольные электростанции с отбором тепла, которые производят меньше выбросов.”
EnBW также отметила, что законопроект предусматривает компенсацию только за вывод из эксплуатации электростанций до 2026 года, хотя из-за «сетевого фактора» угольные генераторы на юге Германии «не имеют никаких реальных шансов отключить свои электростанции. из сети на более раннюю дату ». Он добавил: «Из-за досрочного вывода из эксплуатации этих электростанций в соответствии с регулирующим процессом без какой-либо экономической компенсации этим операторам также не хватит финансовых средств для важных инвестиций в экологически безопасные альтернативы. Он призвал правительство «в духе равной конкуренции и способствовать инвестициям, которые все еще требуются для Energiewende », внести поправки и улучшить правила тендера и компенсации.
Он призвал правительство «в духе равной конкуренции и способствовать инвестициям, которые все еще требуются для Energiewende », внести поправки и улучшить правила тендера и компенсации.
По данным Agora Energiewende, аналитического центра, частично финансируемого Европейским климатическим фондом, потребление возобновляемой энергии в Германии выросло почти до 43% в 2019 г. частью расширения солнечных фотоэлектрических мощностей и «благоприятных климатических условий для ветровой генерации».”
Развитие валовой выработки электроэнергии в Германии с 1990 по 2019 год. Предоставлено: Agora Energiewende. В годовом обзоре отрасли, опубликованном ранее в этом месяце, аналитический центр отметил, что производство каменного угля продолжало снижаться, упав на 31% по сравнению с 2018 годом. Цены на энергию из каменного угля конкурировали. резко с производством природного газа, которое в 2019 году выросло на 11% из-за благоприятных цен. В то же время производство лигнита упало на 22% в 2019 году по сравнению с 2018 годом, достигнув самого низкого уровня с 1990 года.Атомная энергия, которая оставалась неизменной в течение многих лет, снизилась в начале 2020 года, поскольку в соответствии с Законом о поэтапном отказе от ядерной энергетики электростанция в Филипсбург-2 мощностью 1,4 ГВт была отключена от сети.
В то же время производство лигнита упало на 22% в 2019 году по сравнению с 2018 годом, достигнув самого низкого уровня с 1990 года.Атомная энергия, которая оставалась неизменной в течение многих лет, снизилась в начале 2020 года, поскольку в соответствии с Законом о поэтапном отказе от ядерной энергетики электростанция в Филипсбург-2 мощностью 1,4 ГВт была отключена от сети.
также резко сократилась из-за конкурентных цен на возобновляемые источники энергии. «Сегодня энергия ветра и солнца часто дает более дешевую энергию, чем все другие виды энергии», — заявила Agora Energiewende. В 2019 году Германия и Люксембург были двумя ведущими европейскими странами с самыми низкими оптовыми ценами на электроэнергию. Между тем, в 2019 году в Германии было меньше отрицательных цен, и в стране не было дефицита предложения, говорится в сообщении.
«Тем не менее, энергетический переход вступает в 2020-е годы с тяжелым бременем», — предупредил директор Agora Energiewende д-р Патрик Грайхен.
«Развитие ветроэнергетики сократилось более чем на 80% за последние два года и, таким образом, почти остановилось. Кроме того, поскольку промышленные заявки на строительство ветряных электростанций не полностью использовали бюджет мощности в 2019 году, мы также не увидим надежных показателей расширения ветроэнергетики в ближайшие годы. Теперь федеральное правительство должно внести коррективы в политику, чтобы мощность ветроэнергетики продолжала расширяться », — пояснил он.«Ветер — это рабочая лошадка перехода к энергетике, и без энергии ветра мы не сможем добиться успеха в отказе от угля или достижении наших целей по защите климата».
Сложное положение Германии в области энергетики осложняется ее целевыми показателями по выбросам углерода и растущим спросом из-за электрификации, сказал Грайхен. «Нам необходимо создавать больше возобновляемых источников энергии, чтобы компенсировать отказ от атомной энергетики до 2022 года, а также производить достаточно электроэнергии для электромобилей и тепловых насосов», — сказал он.
— Сонал Патель — старший младший редактор POWER (@sonalcpatel, @POWERmagazine)
Обновлено (янв.30): добавляет реакции от Uniper, RWE и EnBW
.Roland Pro аудио / видео — S-RDK
Интегрированное и экономичное решение
Набор драйверов REAC предназначен для использования с консолями Roland V-Mixer Console M-480, M-380, M-400, M-300 и M-200i. Он также совместим с системами Roland S-4000S, S-2416, S-1608, S-0808 и S-MADI Digital Snake. Это интегрированное и экономичное решение идеально подходит для записи живых выступлений и концертов с использованием всемирно известных компонентов V-Mixing System.Использование набора драйверов REAC с возможностями микширования, мастеринга и передачи авторитетных DAW дает профессионалам в области живого звука возможность обеспечивать безупречное качество записи.
| Совместимость драйвера REAC | ||
| Драйвер REAC Версия | 1,3 (Товарный продукт, С-РДК) | 2,0 (Бесплатная загрузка) |
| ОС | Windows XP SP3 (32-разрядная) Windows Vista SP2 (32- и 64-разрядная) Windows 7 SP1 (32-разрядная и 64-разрядная) | Windows 8 (32- и 64-разрядная версии) Windows 7 SP1 (32-разрядная и 64-разрядная) |
| СОНАР | SONAR X1 Производитель Расширенный продюсер SONAR X1 | СОНАР X2 / X3 ПРОИЗВОДИТЕЛЬ СОНАР X2 / X3 СТУДИЯ СОНАР X2 / X3 ESSENTIAL |
| МОНИТОРИНГ Устройство | Roland OCTA-CAPTURE Cakewalk FA-66 Кейкуолк VS-700 R | Roland QUAD-CAPTURE Roland OCTA-CAPTURE Cakewalk FA-66 Кейкуолк VS-700 R |
| СИСТЕМА REAC | М-480 М-400 М-380 М-300 С-4000 С-1608 | М-480 М-400 М-380 М-300 М-200и С-4000 С-2416 С-1608 S-0816 С-0808 |
YRDKRL78G13 Демонстрационный комплект для RL78 / G13
Демонстрационный комплект Renesas (RDK) для RL78 / G13 — это инструмент для оценки и демонстрации микроконтроллеров Renesas RL78 / G13. Цель состоит в том, чтобы предоставить пользователю мощную платформу для отладки и демонстрации, ориентированную на общие приложения. Чтобы помочь в оценке семейства микроконтроллеров RL78, мы включили IAR’s Embedded Workbench Kickstart Edition для RL78. Этот полнофункциональный набор инструментов позволяет реализовать до 16 КБ кода приложения на RL78 / G13 RDK. Чтобы упростить программирование RDK, инструменты IAR поддерживают отладчик Renesas TK, который встроен в RDK RL78 / G13.
Цель состоит в том, чтобы предоставить пользователю мощную платформу для отладки и демонстрации, ориентированную на общие приложения. Чтобы помочь в оценке семейства микроконтроллеров RL78, мы включили IAR’s Embedded Workbench Kickstart Edition для RL78. Этот полнофункциональный набор инструментов позволяет реализовать до 16 КБ кода приложения на RL78 / G13 RDK. Чтобы упростить программирование RDK, инструменты IAR поддерживают отладчик Renesas TK, который встроен в RDK RL78 / G13.
Что такое PMOD
TM ?PMOD TM — это небольшие интерфейсные платы ввода-вывода, которые предлагают идеальный способ расширить возможности наших оценочных и демонстрационных плат MCU.Его можно найти на RDK и RSK. Модули PMOD взаимодействуют с системными платами с помощью 6-, 8- или 12-контактных разъемов. Pmods включают датчики, ввод / вывод, сбор и преобразование данных, разъемы, внешнюю память и многое другое.
- Удобный формат дочерней карты с малым числом контактов
- Периферийный модуль: PMOD
- Торговая марка Digilent Inc.
 (www.digilentinc.com)
(www.digilentinc.com) - Низкая стоимость (коннектор / карты)
- Открытые и бесплатные
- Типичный 12-контактный разъем
- 6-контактный формат также доступен
- 2 слота в каждом RDK
- Обеспечение питания карт
Партнеры-поставщики
Демонстрационный комплект Renesas для RL78 / G13 стал возможен благодаря совместным усилиям Renesas и следующих партнеров (в алфавитном порядке):
Analog Devices предлагает самый широкий в отрасли портфель инерциальных датчиков MEMS, включая высокопроизводительные акселерометры с низким ускорением, акселерометры с высоким ускорением, гироскопы и полностью интегрированные блоки инерциальных измерений (IMU).В портфолио МЭМС ADI теперь входят высокопроизводительные аналоговые и цифровые МЭМС-микрофоны.
На RL78 / G13 RDK встроенный кремниевый микрофон ADI ADMP401 подключен к аналого-цифровому преобразователю RL78 / G13 с помощью микрофонного предусилителя низкого напряжения ADI SSM2167.
Future Designs, Inc. — организация по проектированию и предоставлению технических услуг, основанная в 1989 году и специализирующаяся на проектировании и разработке встраиваемых систем.Их команда инженеров и технического персонала может помочь вам с вашими требованиями к электрике, механике, программному обеспечению, производству и системному проектированию.
Future Designs, Inc. предоставила услуги по настройке оборудования, схематическому изображению, проектированию и компоновке печатных плат, производству и управлению цепочкой поставок для RL78 / G13 RDK.
GainSpan — ведущий производитель полупроводниковых решений в области маломощных сетей Wi-Fi и Wi-Fi для Интернета вещей.Его простая в использовании система на кристалле (SoC), модули и программное обеспечение позволяют клиентам использовать большую установленную базу точек доступа Wi-Fi и смартфонов для создания подключенных продуктов для здравоохранения, интеллектуальной энергетики и управления / мониторинга в промышленности, коммерции. и жилые рынки. В решениях используется SoC со сверхнизким энергопотреблением, который потребляет несколько мкА в режиме ожидания и переходит из режима ожидания в активный режим за несколько мс. Www.gainspan.com.
и жилые рынки. В решениях используется SoC со сверхнизким энергопотреблением, который потребляет несколько мкА в режиме ожидания и переходит из режима ожидания в активный режим за несколько мс. Www.gainspan.com.
[Связанный продукт]
Комплект для разработки приложений датчика Wi-Fi «GS-ADK-RenesasG13TLAS-WEB»
IAR Embedded Workbench с оптимизирующим компилятором C и C ++ обеспечивает полную поддержку устройств RL78 и генерирует очень компактный и эффективный код.Embedded Workbench — это набор инструментов для RL78, а версия Kickstart объемом 16 КБ включена в RL78 RDK. Вот некоторые основные моменты версии 2.0:
Отладка мощности, временная шкала, независимый от позиции код и данные, улучшенная оптимизация скорости, улучшения поддержки эмулятора E1 / E20, поддержка отладчика Renesas TK, улучшенная поддержка многопоточных сред, примеры проектов с поддержкой RPDL
IAR предоставляет две версии для оценки: 30-дневная ознакомительная версия и 16 КБ Kickstart Edition.
Загрузить встроенный инструмент IAR для Renesas RL78
Micrium предоставляет компоненты встроенного программного обеспечения высочайшего качества за счет чистейшего исходного кода, непревзойденной документации и поддержки клиентов. Начиная с флагманского продукта Micrium, uC / OS, и заканчивая полным набором программного обеспечения, Micrium сокращает время вывода на рынок на всех этапах разработки продукта и создает продукты, отвечающие возрастающей сегодня сложности конструкции.
NDK выросла и стала ведущей компанией среди производителей кварцевых устройств с линейкой высокоточных, высоконадежных и компактных кварцевых устройств, которые предвосхищают потребности клиентов следующего поколения.Под лозунгом «качество, стоимость и скорость» NDK стремится зарекомендовать себя в качестве лидера отрасли в области технологий и бренда, пользующегося наибольшим доверием у клиентов.
Okaya Electric America — глобальный поставщик широкого спектра ЖК-модулей и дисплейных технологий, включая символьные, графические, цветные TFT-дисплеи и OLED-панели. Большинство стандартных TFT-, графических и OLED-дисплеев Okaya оснащены высокоточной сенсорной панелью. Если доступные стандартные продукты не соответствуют вашим потребностям, Okaya также предлагает обширные возможности для создания пользовательских ЖК-продуктов.Эти настройки включают изменения читаемости при солнечном свете для наружных приложений.
Большинство стандартных TFT-, графических и OLED-дисплеев Okaya оснащены высокоточной сенсорной панелью. Если доступные стандартные продукты не соответствуют вашим потребностям, Okaya также предлагает обширные возможности для создания пользовательских ЖК-продуктов.Эти настройки включают изменения читаемости при солнечном свете для наружных приложений.
Okaya представила графический ЖК-дисплей с подсветкой 96 x 64.
Total Phase производит мощные и доступные инструменты USB, I2C, SPI и CAN для инженеров встраиваемых систем. Полная линейка хост-адаптеров и анализаторов протоколов Total Phase — это инструменты разработки и отладки, которые предпочитают компании из списка Fortune 500, малые предприятия и исследовательские учреждения по всему миру.
RDK RL78 / G13 включает заголовок отладки Total Phase «Beagle».Анализатор протокола I2C / SPI от Beagle — это ненавязчивый монитор шины на основе USB, который может захватывать, отображать и фильтровать данные I2C и SPI в том виде, в каком они отображаются на шине.
awslabs / aws-config-rdk: Комплект для разработки правил AWS Config помогает разработчикам настраивать, создавать и тестировать собственные правила Config. Он содержит сценарии для включения AWS Config, создания правила Config и его тестирования с помощью образцов ConfigurationItems.
RDK
Набор для разработки правил Мы очень ценим отзывы и сообщения об ошибках на [email protected]! Вы также можете создать проблему в этом репо.
RDK разработан для поддержки интуитивно понятного и продуктивного рабочего процесса «Соответствие как код». Он абстрагирует большую часть недифференцированной тяжелой работы, связанной с развертыванием правил AWS Config, поддерживаемых настраиваемыми лямбда-функциями, и обеспечивает оптимизированный итеративный процесс разработки-развертывания-мониторинга.
Он абстрагирует большую часть недифференцированной тяжелой работы, связанной с развертыванием правил AWS Config, поддерживаемых настраиваемыми лямбда-функциями, и обеспечивает оптимизированный итеративный процесс разработки-развертывания-мониторинга.
Полную документацию, включая справочник по командам, можно найти в документации ReadTheDocs.
Начало работы
Использует Python 2.7 / 3.6 / 3.7 / 3.8 и устанавливается через pip. Требуется учетная запись AWS и достаточные разрешения для управления службой Config, а также для создания сегментов S3, ролей и лямбда-функций.Документ политики AWS IAM, в котором описываются минимально необходимые разрешения, можно найти по адресу policy / rdk-minimum-permissions.json.
Под капотом rdk использует boto3 для вызовов API к AWS, поэтому вы можете установить свои учетные данные любым способом, который распознает boto3 (варианты с 3 по 8 здесь: http://boto3.readthedocs.io/en/latest/guide/configuration .html) или передать их с параметрами командной строки —profile, —region, —access-key-id или —secret-access-key
.
Если вы просто хотите использовать RDK, установите его с помощью pip:
$ pip install rdk
В качестве альтернативы, если вы хотите увидеть код и / или внести свой вклад, вы можете клонировать репозиторий git, а затем из каталога репо использовать pip для установки пакета.Используйте флаг ‘-e’ для создания символических ссылок, чтобы любые внесенные вами изменения отражались при запуске установленного пакета.
Если вы собираетесь создавать свои лямбда-функции с использованием Java, вам потребуется установить Java 8 и gradle. Если вы собираетесь создавать свои лямбда-функции на C #, вам потребуется установить интерфейс командной строки dotnet и .NET Core Runtime 1.08.
$ pip install -e.
Чтобы убедиться, что rdk установлен правильно, при запуске пакета из командной строки без аргументов должна отображаться справочная информация.
$ rdk
использование: rdk [-h] [-p ПРОФИЛЬ] [-k ACCESS_KEY] [-s SECRET_ACCESS_KEY]
[-r РЕГИОН]
<команда> . ..
rdk: error: необходимы следующие аргументы: <команда>, <аргументы команды>
..
rdk: error: необходимы следующие аргументы: <команда>, <аргументы команды>
Использование
Настройте свой env
Для использования RDK рекомендуется создать каталог, который будет вашим рабочим каталогом. Это должно быть выполнено в репозитории исходного кода и в идеале создано как python virtualenv. В этом каталоге выполните команду init , чтобы настроить среду AWS Config.
$ rdk init Запускаем init! Создание корзины конфигурации config-bucket-780784666283 Создание config-role роли IAM Ожидание распространения роли IAM Служба конфигурации включена Настройка конфигурации завершена. Создание сегмента кода config-rule-code-bucket-780784666283ap-southeast-1
Последующий запуск init проверит вашу настройку AWS Config и повторно создаст все необходимые сегменты S3 или ресурсы IAM.
Создание правил
В рабочем каталоге используйте команду create , чтобы начать создание нового настраиваемого правила. Вы должны указать время выполнения лямбда-функции, которая будет поддерживать правило, и вы также можете указать тип ресурса (или список типов, разделенных запятыми), который будет оценивать правило, или максимальную частоту для периодического правила. Это добавит новый каталог для правила и заполнит его несколькими файлами, включая скелет вашего лямбда-кода.
Вы должны указать время выполнения лямбда-функции, которая будет поддерживать правило, и вы также можете указать тип ресурса (или список типов, разделенных запятыми), который будет оценивать правило, или максимальную частоту для периодического правила. Это добавит новый каталог для правила и заполнит его несколькими файлами, включая скелет вашего лямбда-кода.
$ rdk create MyRule --runtime python3.8 --resource-types AWS :: EC2 :: Instance --input-parameters '{"desireInstanceType": "t2.micro"}'
Бегу создать!
Созданы файлы локальных правил.В Windows необходимо избегать двойных кавычек при указании входных параметров, поэтому аргумент —input-parameters вместо этого будет выглядеть примерно так:
'{\ "requiredInstanceType \": \ "t2.micro \"}'
Обратите внимание, что вы можете создавать правила, которые используют ЛИБО типы ресурсов ИЛИ максимальную частоту, но не то и другое одновременно. Мы обнаружили, что правила, которые пытаются инициировать как событие, так и периодическое завершение, очень сложны, и поэтому не рекомендуем это делать.
Локальное изменение правил
После создания правила отредактируйте файл python в каталоге правил (в приведенном выше примере это будет MyRule / MyRule.py , но может быть глубже в дереве каталогов правил в зависимости от выбранной вами среды выполнения Lambda), чтобы добавить какую бы логику ни требовало ваше Правило, в функции calculate_compliance . У вас будет доступ к CI, который был отправлен Config, а также ко всем параметрам, настроенным для правила Config. Ваша функция должна возвращать либо простой статус соответствия (один из COMPLIANT , NONCOMPLIANT или NOT_APPLICABLE ), либо, если вы используете среду выполнения python или node, вы можете вернуть объект JSON с несколькими оценочными ответами, которые RDK отправит обратно в AWS Config.Пример может выглядеть так:
для sg в ответ ['SecurityGroups']:
оценки.append (
{
'ComplianceResourceType': 'AWS :: EC2 :: SecurityGroup',
'ComplianceResourceId': sg ['GroupId'],
"Тип соответствия": "СООТВЕТСТВУЕТ",
'Аннотация': 'Это важное замечание. ',
'OrderingTimestamp': str (datetime.datetime.now ()).
})
вернуть оценки
',
'OrderingTimestamp': str (datetime.datetime.now ()).
})
вернуть оценки
Это необходимо для периодических правил, которые не запускаются никаким изменением CI (что означает, что переданный CI будет нулевым), а также для прикрепления аннотаций к результатам оценки.
Если вы хотите увидеть, как выглядит структура JSON CI для создания вашей логики, вы можете использовать
$ rdk sample-ci <Тип ресурса>
для вывода отформатированного документа JSON.
Запись и выполнение модульных тестов
Если вы пишете правила конфигурации с использованием любой из сред выполнения Python, будет развернут файл <имя правила> _test.py вместе с каркасом вашей лямбда-функции. Это можно использовать для написания модульных тестов в соответствии со стандартной структурой Python unittest (задокументировано здесь: https: // docs.python.org/3/library/unittest.html), который можно запустить с помощью команды test-local rdk:
$ rdk test-local MyTestRule Запуск локального теста! Тестирование MyTestRule Ищем тесты в / Users / mborch / Code / rdk-dev / MyTestRule -------------------------------------------------- ------------------- Выполнить 0 тестов за 0,000 с.Ok
Тестовый файл включает настройку библиотеки MagicMock, которую можно использовать для заглушки вызовов API boto3, если логика вашего правила будет включать вызовы API для сбора дополнительной информации о среде AWS.Чтобы узнать, как это сделать, ознакомьтесь с этим сообщением в блоге: https://sgillies.net/2017/10/19/mock-is-magic.html
.Изменить правило
Если вам нужно изменить параметры правила конфигурации в вашем рабочем каталоге, вы можете использовать команду modify . Любые указанные вами параметры перезапишут существующие значения, любые, которые вы не укажете, не будут изменены.
$ rdk изменить MyRule --runtime python2.7 --maximum-frequency TwentyFour_Hours --input-parameters '{"desireInstanceType": "t2.микро"}'
Запуск модификации!
Измененное правило MyRule. Используйте команду `deploy`, чтобы отправить ваши изменения в AWS.
Опять же, в Windows входные параметры будут выглядеть так:
'{\ "requiredInstanceType \": \ "t2. micro \"}'
micro \"}'
Стоит отметить, что до тех пор, пока вы не вызовете команду deploy , ваше правило существует только в вашем рабочем каталоге, ни одна из обсуждаемых до сих пор команд правил фактически не вносит изменений в вашу учетную запись.
Правило развертывания
После завершения кода проверки соответствия и настройки конфигурации правила вы можете развернуть правило в своей учетной записи с помощью команды deploy .Это заархивирует ваш код (и другие связанные файлы кода, если таковые имеются) в развертываемый пакет (или запустите сборку gradle, если вы выбрали среду выполнения java8, или запустите этап упаковки лямбда из интерфейса командной строки dotnet, если вы выбрали dotnetcore1 .0), скопируйте этот zip-файл в S3, а затем запустите или обновите стек CloudFormation, который определяет ваше правило конфигурации, функцию Lambda, а также необходимые разрешения и роли IAM для его работы. Поскольку CloudFormation не выполняет тщательную проверку объектов кода Lambda в S3 для создания своего набора изменений, команда deploy также напрямую обновляет функцию Lambda для любых последующих развертываний, чтобы убедиться, что изменения кода распространяются правильно.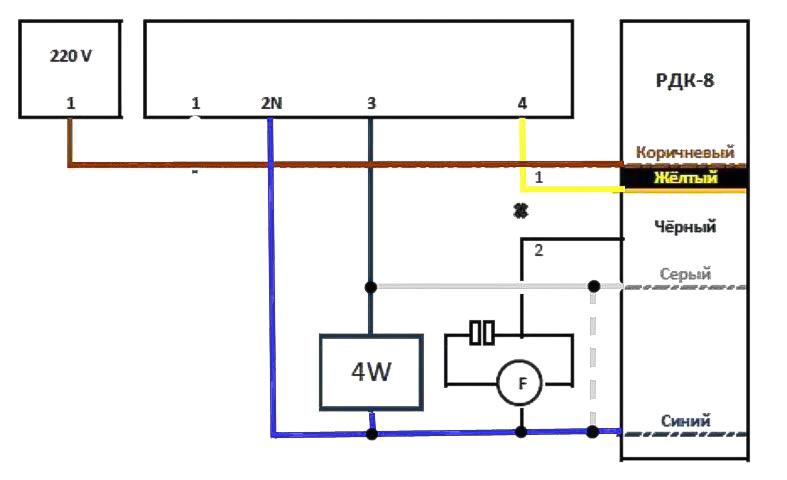
$ rdk: развертывание MyRule Выполняется развертывание! Архивирование MyRule Загрузка MyRule Создание стека CloudFormation для MyRule Ожидание завершения операции стека CloudFormation ... ... Ожидание завершения операции стека CloudFormation ... Развертывание конфигурации завершено.
Точный результат будет зависеть от времени выполнения Lambda. Вы можете использовать флаг —all, чтобы развернуть все правила в вашем рабочем каталоге.
Просмотр журналов для развернутого правила
После развертывания правила в AWS вы можете получить журналы CloudWatch, связанные с вашей лямбда-функцией, с помощью команды logs .
$ rdk журналы MyRule -n 5
2017-11-15 22:59:33 - START RequestId: 96e7639a-ca15-11e7-95a2-b15218d Версия: $ LATEST
2017-11-15 23:41:13 - ИД запроса ОТЧЕТА: 68e0304f-ca1b-11e7-b735-81ebae95acda Продолжительность: 0,50 мс оплачиваемая продолжительность: 100 мс Размер памяти: 256 МБ
Максимальный объем используемой памяти: 36 МБ
2017-11-15 23:41:13 - END RequestId: 68e0304f-ca1b-11e7-b735-81ebae95acda
2017-11-15 23:41:13 - Служебный класс RDK по умолчанию еще не поддерживает уведомления по расписанию. 2017-11-15 23:41:13 - START RequestId: 68e0304f-ca1b-11e7-b735-81ebae95acda Версия: $ LATEST
2017-11-15 23:41:13 - START RequestId: 68e0304f-ca1b-11e7-b735-81ebae95acda Версия: $ LATEST
Вы можете использовать флаги командной строки -n и -f точно так же, как команду UNIX tail , чтобы просматривать большее количество событий журнала и непрерывно опрашивать о новых событиях.Последний вариант может быть полезен в сочетании с ручным запуском оценки конфигурации для вашего правила конфигурации развертывания, чтобы убедиться, что оно работает должным образом.
Выполнение тестов
Каталог тестирования содержит скрипты и файлы buildspec, которые я использую для запуска основных функциональных тестов в различных средах CLI (в настоящее время Ubuntu linux с python2.7, Ubuntu linux с python 3.6 / 3.7 / 3.8 и Windows Server с python2.7) . Если есть интерес, я могу выпустить шаблон CloudFormation, который можно было бы использовать для создания тестовой среды, дайте мне знать, хотите ли вы этого!
Расширенные функции
Развертывания между аккаунтами
В RDK были добавлены функции для упрощения схемы развертывания между учетными записями, которую корпоративные клиенты стандартизировали для пользовательских правил конфигурации. Архитектура с несколькими учетными записями — это та архитектура, в которой функции Lambda развертываются в одной центральной учетной записи «Соответствие» (которая может быть такой же, как и центральная учетная запись «Безопасность»), а правила конфигурации развертываются на любом количестве «Satellite» учетные записи, которые используются другими командами или отделами. Это дает специалистам по комплаенсу уверенность в том, что их логику правил нельзя изменить, и значительно упрощает для них изменение логики правил без необходимости проходить сложный процесс развертывания в потенциально сотнях учетных записей AWS.Шаблон для нескольких учетных записей использует две расширенные функции RDK — развертывание только функций и команду create-rule-template.
Архитектура с несколькими учетными записями — это та архитектура, в которой функции Lambda развертываются в одной центральной учетной записи «Соответствие» (которая может быть такой же, как и центральная учетная запись «Безопасность»), а правила конфигурации развертываются на любом количестве «Satellite» учетные записи, которые используются другими командами или отделами. Это дает специалистам по комплаенсу уверенность в том, что их логику правил нельзя изменить, и значительно упрощает для них изменение логики правил без необходимости проходить сложный процесс развертывания в потенциально сотнях учетных записей AWS.Шаблон для нескольких учетных записей использует две расширенные функции RDK — развертывание только функций и команду create-rule-template.
Развертывание только для функций
Используя флаг -f или —functions-only в команде развертывания, RDK будет развертывать только необходимые лямбда-функции, роль выполнения лямбда и разрешения лямбда для учетной записи, указанной в учетных данных для выполнения. Это достигается путем объединения всех фрагментов Lambda-функции CloudFormation для выбранных правил в единый динамически сгенерированный шаблон и развертывания этого шаблона CloudFormation.Одним из следствий этого является то, что последующие развертывания, в которых указан другой набор правил для одного и того же имени стека, будут обновлять этот стек CloudFormation, и все правила, которые были включены в первое развертывание, но не во второе, будут удалены. Вы можете использовать параметр —stack-name, чтобы переопределить имя стека CloudFormation по умолчанию, если вам нужно независимо управлять различными подмножествами ваших лямбда-функций. Предполагаемое использование — развертывание функций для всех правил конфигурации в учетной записи безопасности / соответствия, что можно сделать просто с помощью команды rdk deploy -f —all из вашего рабочего каталога.
Это достигается путем объединения всех фрагментов Lambda-функции CloudFormation для выбранных правил в единый динамически сгенерированный шаблон и развертывания этого шаблона CloudFormation.Одним из следствий этого является то, что последующие развертывания, в которых указан другой набор правил для одного и того же имени стека, будут обновлять этот стек CloudFormation, и все правила, которые были включены в первое развертывание, но не во второе, будут удалены. Вы можете использовать параметр —stack-name, чтобы переопределить имя стека CloudFormation по умолчанию, если вам нужно независимо управлять различными подмножествами ваших лямбда-функций. Предполагаемое использование — развертывание функций для всех правил конфигурации в учетной записи безопасности / соответствия, что можно сделать просто с помощью команды rdk deploy -f —all из вашего рабочего каталога.
команда create-rule-template
Эта команда создает шаблон CloudFormation, который определяет сами правила AWS Config, а также роль Config, корзину данных Config, средство записи конфигурации и канал доставки, необходимые для работы правил Config во вспомогательной учетной записи. Вы должны указать имя файла для сгенерированного шаблона с помощью флагов —output-file или o командной строки. Созданный шаблон принимает единственный параметр AccountID центральной учетной записи соответствия, которая содержит функции Lambda, которые будут поддерживать ваши пользовательские правила конфигурации.Сгенерированный шаблон можно развернуть в желаемых вспомогательных учетных записях с помощью любого из средств, с помощью которых вы можете развернуть любой другой шаблон CloudFormation, включая консоль, интерфейс командной строки, в качестве задачи CodePipeline или с помощью StackSets. Команда create-rule-template принимает все стандартные аргументы для выбора правил для включения в сгенерированный шаблон, включая списки имен отдельных правил, флаг —all или использование функции RuleSets, описанной ниже.
Вы должны указать имя файла для сгенерированного шаблона с помощью флагов —output-file или o командной строки. Созданный шаблон принимает единственный параметр AccountID центральной учетной записи соответствия, которая содержит функции Lambda, которые будут поддерживать ваши пользовательские правила конфигурации.Сгенерированный шаблон можно развернуть в желаемых вспомогательных учетных записях с помощью любого из средств, с помощью которых вы можете развернуть любой другой шаблон CloudFormation, включая консоль, интерфейс командной строки, в качестве задачи CodePipeline или с помощью StackSets. Команда create-rule-template принимает все стандартные аргументы для выбора правил для включения в сгенерированный шаблон, включая списки имен отдельных правил, флаг —all или использование функции RuleSets, описанной ниже.
$ rdk создать шаблон правила -o удаленный шаблон правила.json - все Создание шаблона CloudFormation! Шаблон CloudFormation, записанный в remote-rule-template.json
Наборы правил
Начиная с версии 0. 3.11, в правила можно добавлять теги RuleSet, которые можно использовать для совместного развертывания и тестирования групп правил. Правила могут принадлежать нескольким RuleSet, а членство RuleSet сохраняется только в метаданных parameters.json. Команды deploy, create-rule-template и test-local поддерживают набор правил, поэтому набор правил может быть передан в качестве цели вместо —all или определенного именованного правила.
3.11, в правила можно добавлять теги RuleSet, которые можно использовать для совместного развертывания и тестирования групп правил. Правила могут принадлежать нескольким RuleSet, а членство RuleSet сохраняется только в метаданных parameters.json. Команды deploy, create-rule-template и test-local поддерживают набор правил, поэтому набор правил может быть передан в качестве цели вместо —all или определенного именованного правила.
Список наборов правил, разделенных запятыми, может быть добавлен к правилу при его создании (с помощью флага —rulesets), как часть команды изменения или с помощью новых подкоманд набора правил для добавления или удаления отдельных правил из набора правил.
В списке запущенных наборов правил rdk будет отображаться список наборов правил, определенных в настоящее время для всех правил в рабочем каталоге.
rdk-dev список наборов правил $ rdk Наборы правил: Другой набор правил MyNewSet
При присвоении имени определенному набору правил будут перечислены все правила, которые являются частью этого набора правил.
rdk-dev список наборов правил $ rdk AnotherRuleSet Правила в AnotherRuleSet: RSTest
Правила могут быть добавлены или удалены из RuleSets с помощью подкоманд добавления и удаления:
rdk-dev $ rdk rulessets добавить MyNewSet RSTest RSTest добавлен в RuleSet MyNewSet rdk-dev $ набор правил rdk удаляет AnotherRuleSet RSTest RSTest удален из набора правил AnotherRuleSet
RuleSets — это удобный способ поддерживать единый репозиторий правил конфигурации, для которого может потребоваться развертывание их подмножеств в разных средах.Например, ваша среда разработки может содержать некоторые правила, которые вы запускаете в производственной среде, но не все из них; RuleSets дает вам возможность идентифицировать и выборочно развертывать соответствующие правила в каждой среде.
Управляемые правила
RDK может развертывать управляемые правила AWS.
Для этого создайте правило с помощью команды «rdk create» и укажите действительный идентификатор источника с помощью параметра интерфейса командной строки —source-identifier. Список управляемых правил можно найти здесь: https: // docs.aws.amazon.com/config/latest/developerguide/managed-rules-by-aws-config.html и обратите внимание, что идентификатор можно получить, заменив дефис на подчеркивание и используя все заглавные буквы (например, «guardduty- включено-централизованное правило имеет SourceIdentifier «GUARDDUTY_ENABLED_CENTRALIZED»). Как и в случае с пользовательскими правилами, вам необходимо указать исходные события и / или максимальную частоту оценки, а также передать любые параметры правила. Полученный каталог правил будет содержать только параметры.json, но с помощью rdk deploy или rdk create-rule-template можно использовать для развертывания управляемого правила, как и любого другого настраиваемого правила.
Список управляемых правил можно найти здесь: https: // docs.aws.amazon.com/config/latest/developerguide/managed-rules-by-aws-config.html и обратите внимание, что идентификатор можно получить, заменив дефис на подчеркивание и используя все заглавные буквы (например, «guardduty- включено-централизованное правило имеет SourceIdentifier «GUARDDUTY_ENABLED_CENTRALIZED»). Как и в случае с пользовательскими правилами, вам необходимо указать исходные события и / или максимальную частоту оценки, а также передать любые параметры правила. Полученный каталог правил будет содержать только параметры.json, но с помощью rdk deploy или rdk create-rule-template можно использовать для развертывания управляемого правила, как и любого другого настраиваемого правила.
Содействие
, напишите нам по адресу [email protected], если у вас есть какие-либо вопросы. Мы рады помочь и обсудить.
Авторы
- Майкл Борхерт — Версия Python
- Джонатан Роулт — Дизайн, тестирование, отзывы
- Грег Ким и Крис Гутьеррес — Начальная работа и определения КИ
- Генри Хуанг — Оригинальные шаблоны CFN и другой код
- Рики Чау — Текущий обслуживающий персонал
- Сантош Кумар — Текущий обслуживающий персонал
- Хосе Обандо — Текущий обслуживающий персонал
- Sandeep Batchu — Текущий обслуживающий персонал
Лицензия
Этот проект находится под лицензией Apache 2. 0 Лицензия
0 Лицензия
Благодарности
- команда boto3 делает все это волшебство возможным.
Ссылка
Кратковременная визуальная память для когерентного движения у игроков в видеоигры: свидетельство парадигмы маскировки памяти
Точность
Результаты обучения распознаванию направления движения показали, что AVGP, NAVGP и CON требовали соответственно 2,25 сеанса (SEM: 0,58 ), 2,2 сеанса (SEM: 0,2) и 4,87 сеанса (SEM: 1,16), чтобы получить желаемый уровень точности (> 0.95 правильных показателей производительности). Тест Шапиро-Уилка на нормальность показал, что количество сеансов не было нормально распределено для трех групп ( p <0,05). Кроме того, тест Левена на основе среднего показал, что дисперсии не были однородными ( p = 0,002). Поэтому, чтобы проанализировать, была ли значительная разница в количестве тренировок между тремя группами, мы использовали тест Краскала-Уоллиса с независимой выборкой. Тест Краскела-Уоллиса действительно выявил едва значимое влияние группы ( χ 2 = 6. 127, df = 2, p = 0,047). Бонферрони-Холм скорректированные апостериорные сравнения Манна-Уитни не выявили существенной разницы между AVGP и NAVGP ( p = 0,254), между AVGP и CON ( p = 0,123) и между NAVGP и CON ( p ). = 0,16). Однако непараметрический анализ тренда (Jonckheere-Terpstra) показал значительную тенденцию к увеличению количества тренировочных сессий для порядка AVGP, NAVGP и CON (односторонний p = 0.0052), что предполагает значительное увеличение количества тренировок в так упорядоченных группах.
127, df = 2, p = 0,047). Бонферрони-Холм скорректированные апостериорные сравнения Манна-Уитни не выявили существенной разницы между AVGP и NAVGP ( p = 0,254), между AVGP и CON ( p = 0,123) и между NAVGP и CON ( p ). = 0,16). Однако непараметрический анализ тренда (Jonckheere-Terpstra) показал значительную тенденцию к увеличению количества тренировочных сессий для порядка AVGP, NAVGP и CON (односторонний p = 0.0052), что предполагает значительное увеличение количества тренировок в так упорядоченных группах.
Мы также сравнили эффективность трех групп по распознаванию направления движения в последней тренировке. Однофакторный дисперсионный анализ показал отсутствие значительных различий в различении направления движения между тремя группами после тренировки ( F 2,34 = 0,153, p = 0,859). Кроме того, Бонферрони скорректировал t-тесты для одной выборки, которые показали, что точность AVGP, NAVGP и CON была значительно выше 0. 95 (AVGP: среднее = 0,987, SEM = 0,0049, t 11 = 7,71, p = 0,0001; NAVGPs: среднее = 0,99, SEM = 0,01, t 9 = 4,00, p = 0,003; Минусы: среднее = 0,985, SEM = 0,00476, t 14 = 7,36, p = 0,0001), что предполагает одинаково высокие показатели во всех трех группах.
95 (AVGP: среднее = 0,987, SEM = 0,0049, t 11 = 7,71, p = 0,0001; NAVGPs: среднее = 0,99, SEM = 0,01, t 9 = 4,00, p = 0,003; Минусы: среднее = 0,985, SEM = 0,00476, t 14 = 7,36, p = 0,0001), что предполагает одинаково высокие показатели во всех трех группах.
Кроме того, мы проверили, влияет ли абсолютное направление цели на производительность. Смешанный дисперсионный анализ ANOVA на последней тренировке, включающий в качестве межсубъектного фактора группу (т.е., AVGP, NAVGP и CON), и как фактор внутри субъектов, целевое направление (т. е. восемь основных направлений) не выявило какого-либо значимого основного эффекта (группа: F 2,34 = 0,153, p = 0,859, η p 2 = 0,009; направление цели: F 7,238 = 0,811, p = 0,58, η p 2 = 0,023) или взаимодействие ( F 14,238 = 0,7, p = 0,775, η p 2 = 0. 039), предполагая, что в конце тренировки производительность была постоянной по всем целевым направлениям.
039), предполагая, что в конце тренировки производительность была постоянной по всем целевым направлениям.
Затем мы определили влияние маскировки памяти на сохранение информации о движении, зависящей от направления. На рис. 2а показано соотношение правильных ответов в зависимости от разницы направлений между образцом и маской в парадигме маскирования памяти, использованной в основном эксперименте. Смешанный дисперсионный анализ, включающий в качестве межгруппового фактора фактор группы (например, AVGP, NAVGP, CON) и в качестве фактора внутри субъектов условие маскировки (включая условие отсутствия маски и пять различий направлений между образцом и маской), выявил значительный эффект группы ( F 2,34 = 10.1, p <0,001, η p 2 = 0,372) и существенное влияние условия маскировки ( F 5,170 = 22,69, p <0,001, η p 2 = 0,40). Взаимодействие не было значимым ( F 10,170 = 1,51, p = 0,139, η p 2 = 0,082), предполагая, что широкая настройка маскировки была одинаковой для разных групп.
Результаты эксперимента по маскированию памяти.( a) Доля правильных ответов как функция разности направлений маски выборки (град.) (AVGP: n = 12, NAVGP: n = 10, CONs: n = 15). Области достоверности (обозначенные цветовой штриховкой) представляют стандартную ошибку среднего (SEM). ( b ) Доля правильных ответов для условий без маски и условий маски. Данные были объединены по всем разностям направления движения образца-маски. Планки погрешностей ± SEM. ( c) Точки данных представляют точность (правильная пропорция) для отдельных членов трех групп.Точки данных маски — это средние уровни производительности для каждого участника, усредненные по каждой из пяти разностей направлений выборки и маски. Черная непрерывная линия представляет собой линию равной производительности для условий маски и без маски.
Односторонний дисперсионный анализ между точностью AVGP, NAVGP и CON в условиях отсутствия маскирования выявил значительный эффект группы ( F 2,34 = 5,75, p = 0,007). Апостериорные сравнения с использованием коэффициента ложного обнаружения (FDR) на уровне 0.05 48 выявил только значительную разницу между CON и NAVGP в точности для условия отсутствия маскирования ( отрегулированный-p = 0,006). Односторонний дисперсионный анализ не выявил каких-либо существенных различий между AVGP и NAVGP ( скорректированный p = 0,12) и между AVGP и CON ( скорректированный p = 0,12).
Апостериорные сравнения с использованием коэффициента ложного обнаружения (FDR) на уровне 0.05 48 выявил только значительную разницу между CON и NAVGP в точности для условия отсутствия маскирования ( отрегулированный-p = 0,006). Односторонний дисперсионный анализ не выявил каких-либо существенных различий между AVGP и NAVGP ( скорректированный p = 0,12) и между AVGP и CON ( скорректированный p = 0,12).
Для дальнейшей оценки эффекта маскирующего стимула мы провели отдельные повторные измерения ANOVA для каждой группы.
Для группы AVGP дисперсионный анализ выявил значительный эффект условия маскировки ( F 5,55 = 5.67, p = 0,0001, η p 2 = 0,34). Post-hoc сравнения с использованием FDR при 0,05 показали, что все различия направления целевой выборки и маски значительно отличались от условия без маски ( p <0,05). Однофакторный дисперсионный анализ с повторными измерениями, выполненный только для пяти разностей направлений целевой выборки и маски, не выявил значимого эффекта ( F 4,44 = 0,618, p = 0,65, η p 2 = 0. 053). Кроме того, односторонний дисперсионный анализ с повторными измерениями с полиномиальным анализом тренда не обнаружил какой-либо значимой тенденции (линейной, квадратичной, кубической, квартичной, все p > 0,05), что предполагает незначительную настройку маскировки.
053). Кроме того, односторонний дисперсионный анализ с повторными измерениями с полиномиальным анализом тренда не обнаружил какой-либо значимой тенденции (линейной, квадратичной, кубической, квартичной, все p > 0,05), что предполагает незначительную настройку маскировки.
Для группы NAVGPs повторные измерения ANOVA выявили значительный эффект маскировки ( F 5,45 = 6,38, p = 0,0001, η p 2 = 0,42). Апостериорные сравнения с использованием FDR при 0,05 показали, что все различия направления целевой выборки и маски значительно отличались от условия отсутствия маски ( p <0.05). Однофакторный дисперсионный анализ ANOVA с повторными измерениями, выполненный для пяти разностей направлений целевой выборки и маски, не выявил значимого эффекта ( F 4,36 = 1,49, p = 0,225, η p 2 = 0,142 ). Анализ тенденций не выявил какой-либо значимой тенденции (все p > 0,05).
Аналогичным образом для группы CONS ANOVA выявил значительный эффект маскировки ( F 5,70 = 13,97, p <0,001, η p 2 = 0.5). Апостериорные сравнения с использованием FDR при 0,05 показали, что все различия направления целевой выборки и маски значительно отличались от условия без маски ( p <0,001). Однофакторный дисперсионный анализ ANOVA с повторными измерениями, выполненный для пяти разностей направлений целевой выборки и маски, не выявил какого-либо значимого эффекта ( F 4,56 = 1,135, p = 0,349, η p 2 = 0,075). Кроме того, анализ тренда не выявил какой-либо значимой тенденции (все p > 0.05), что опять же предполагает незначительную настройку маскировки. Таким образом, мы обнаружили, что маскирующий стимул влияет на выполнение задачи независимо от направления его движения по отношению к образцу. Однако настройка маскировки практически отсутствует.
На рисунке 2b показана производительность AVGP, NAVGP и CON в условиях без маски и в условиях маски после объединения всех разностей направлений выборки и маски. В среднем промежуточное маскирование снизило производительность на 8,31%, 9,7% и 16,85% в AVGP, NAVGP и CON соответственно.Смешанный дисперсионный анализ показал значительный эффект группы ( F 2,34 = 8,93, p <0,001, η p 2 = 0,344), значительный эффект условия маскировки (т. Е. Отсутствие -маскирование по сравнению с маскированием) ( F 1,34 = 93,88, p <0,001, η p 2 = 0,734) и значительное взаимодействие между условием маскировки и группой ( F 2, 34 = 4,07, p = 0,026, η p 2 = 0.193). Для группы апостериорные сравнения с использованием FDR при 0,05 показали значительную разницу между AVGP и CON ( скорректированный p, = 0,018), между NAVGP и CON ( скорректированный p = 0,0003), но не значительную разницу между AVGP и NAVGP (скорректированный p, = 0,136). Для условия x групповое взаимодействие, апостериорные сравнения выявили значительную разницу между условием отсутствия маскировки и условием маски для всех трех групп ( скорректированный-p <0.001). Кроме того, для условия отсутствия маскирования мы обнаружили значительную разницу в производительности только между NAVGP и CON ( скорректированный p, = 0,006), однако для условия маскирования апостериорные сравнения выявили значительную разницу между AVGP и CON ( отрегулированный-p = 0,0045), между NAVGP и CON ( отрегулированный-p = 0,0003), но нет разницы между AVGP и NAVGP ( отрегулированный-p = 0,27), что предполагает очень схожую производительность в условиях отсутствия маскирования для группы видеоигр.Кроме того, как AVGP, так и NAVGP, похоже, имеют одинаковую толерантность к промежуточному маскирующему стимулу, влияя на их характеристики распознавания движения в меньшей степени, чем у CON.
Для условия x групповое взаимодействие, апостериорные сравнения выявили значительную разницу между условием отсутствия маскировки и условием маски для всех трех групп ( скорректированный-p <0.001). Кроме того, для условия отсутствия маскирования мы обнаружили значительную разницу в производительности только между NAVGP и CON ( скорректированный p, = 0,006), однако для условия маскирования апостериорные сравнения выявили значительную разницу между AVGP и CON ( отрегулированный-p = 0,0045), между NAVGP и CON ( отрегулированный-p = 0,0003), но нет разницы между AVGP и NAVGP ( отрегулированный-p = 0,27), что предполагает очень схожую производительность в условиях отсутствия маскирования для группы видеоигр.Кроме того, как AVGP, так и NAVGP, похоже, имеют одинаковую толерантность к промежуточному маскирующему стимулу, влияя на их характеристики распознавания движения в меньшей степени, чем у CON.
На рис. 2c очевидно, что AVGP и NAVGP имеют более высокую точность, чем CON, но все три группы показывают лучшую производительность в условии отсутствия маски (т. е. все точки данных находятся выше диагонали равной производительности за одним исключением). Этот образец результатов был последовательным для девяти из двенадцати AVGP, а также для всех NAVGP и CON.
е. все точки данных находятся выше диагонали равной производительности за одним исключением). Этот образец результатов был последовательным для девяти из двенадцати AVGP, а также для всех NAVGP и CON.
Моделирование кратковременной зрительной памяти
Чтобы оценить, различались ли компоненты кратковременной зрительной памяти в трех группах, данные точности были сопоставлены с известной моделью кратковременной зрительной памяти; с переменной точностью (ВП) модель 49,50,51 . Предыдущие исследования показали, что точность кратковременной зрительной памяти является непрерывной и изменчивой по элементам памяти и испытаниям 49,50,51,52 , а не непрерывным, но равномерно распределенным по элементам, которые нужно запомнить 53 , или переменной, но развертываемой в течение дискретное количество слотов памяти 25 .Основываясь на Zhang and Luck 25 , ниже предела слота элементы памяти могут храниться более чем в одном слоте и усредняться, таким образом создавая трассировки памяти с высокой точностью и высоким разрешением. Однако за пределами предела слота информация не сохраняется, что приводит к увеличению скорости предположения (т. Е. Случайных ответов). Следовательно, модель усреднения слот + модель Zhang и Luck 25 предсказывает, что ошибки в памяти при вызове возникают в результате предположений и шума, с которым сохраняется элемент.Модель VP не предполагает каких-либо ограничений слотов памяти, но ресурсы меняются в зависимости от испытаний и масштабируются в зависимости от количества запоминаемых элементов. Следуя логике ван ден Берга и др. . 50 , наблюдатель должен одновременно запомнить как местоположение, так и направление движения двух когерентных RDK. Каждый RDK кодируется с определенной точностью. Модель VP предполагает, что внутреннее измерение стимула наблюдателем является зашумленным, и она следует распределению фон Мизеса (круговое нормальное), в котором высокая точность дает более узкое распределение фон Мизеса.В модели VP точность памяти варьируется в разных испытаниях, и модель предполагает, что она независимо от испытаний извлекается из гамма-распределения.
Однако за пределами предела слота информация не сохраняется, что приводит к увеличению скорости предположения (т. Е. Случайных ответов). Следовательно, модель усреднения слот + модель Zhang и Luck 25 предсказывает, что ошибки в памяти при вызове возникают в результате предположений и шума, с которым сохраняется элемент.Модель VP не предполагает каких-либо ограничений слотов памяти, но ресурсы меняются в зависимости от испытаний и масштабируются в зависимости от количества запоминаемых элементов. Следуя логике ван ден Берга и др. . 50 , наблюдатель должен одновременно запомнить как местоположение, так и направление движения двух когерентных RDK. Каждый RDK кодируется с определенной точностью. Модель VP предполагает, что внутреннее измерение стимула наблюдателем является зашумленным, и она следует распределению фон Мизеса (круговое нормальное), в котором высокая точность дает более узкое распределение фон Мизеса.В модели VP точность памяти варьируется в разных испытаниях, и модель предполагает, что она независимо от испытаний извлекается из гамма-распределения. Модель также предполагает, что средняя точность (т.е. среднее значение гамма-распределения с определенным масштабным параметром) зависит от установленного размера по степенному закону (см. Рис. 3a, b в van der Berg и др. . 50 для схематического представления модели), однако в нашем эксперименте мы тестировали только один размер набора (т.е. два элемента памяти).Модель VP характеризуется тремя параметрами: вероятностью угадывания ( g ), модой SD и изменчивостью SD. Скорость предположения ( г ) выражает вероятность, с которой наблюдатель не запомнил, какой из двух когерентно движущихся участков в тестовом интервале дрейфовал в другом направлении по отношению к образцу и, следовательно, предположил случайным образом. Режим SD представляет точность запоминаемых элементов; высокие значения в режиме SD указывают на менее точное представление памяти.Вариабельность SD указывает на изменение точности памяти от испытания к испытанию; высокие значения вариабельности SD указывают на высокую вариабельность от испытания к испытанию.
Модель также предполагает, что средняя точность (т.е. среднее значение гамма-распределения с определенным масштабным параметром) зависит от установленного размера по степенному закону (см. Рис. 3a, b в van der Berg и др. . 50 для схематического представления модели), однако в нашем эксперименте мы тестировали только один размер набора (т.е. два элемента памяти).Модель VP характеризуется тремя параметрами: вероятностью угадывания ( g ), модой SD и изменчивостью SD. Скорость предположения ( г ) выражает вероятность, с которой наблюдатель не запомнил, какой из двух когерентно движущихся участков в тестовом интервале дрейфовал в другом направлении по отношению к образцу и, следовательно, предположил случайным образом. Режим SD представляет точность запоминаемых элементов; высокие значения в режиме SD указывают на менее точное представление памяти.Вариабельность SD указывает на изменение точности памяти от испытания к испытанию; высокие значения вариабельности SD указывают на высокую вариабельность от испытания к испытанию. Мы выбираем модель VP вместо других доступных моделей VSTM также из-за недавних данных визуализации мозга, которые показывают, как верхняя внутри теменная борозда (sIPS) может участвовать в модуляции вариабельности точности памяти 54 .
Мы выбираем модель VP вместо других доступных моделей VSTM также из-за недавних данных визуализации мозга, которые показывают, как верхняя внутри теменная борозда (sIPS) может участвовать в модуляции вариабельности точности памяти 54 .
Оценка параметров модели переменной точности. ( a ) g (случайное угадывание) для AVGP, NAVGP и CON.( b ) Режим SD (Precision) для трех групп. ( c ) SD var (вариабельность прецизионности от испытания к испытанию) для трех групп. Планки погрешностей ± SEM.
Мы установили двухальтернативную версию модели VP с принудительным выбором (2AFC), используя Matlab MemToolbox 55 (http://visionlab.github.io/MemToolbox/), чтобы оценить, есть ли различия в скорость предположения ( g, ), точность режима (, режим SD, ) и изменчивость SD ( SD, var ) между тремя группами.Для каждой разности направлений выборки и маски мы рассчитали разность направлений между целевой выборкой и относительной тестовой ячейкой (т. Е. Тестовая ячейка, занимающая то же пространственное положение целевой выборки), и присвоили значение 1, если наблюдатель ответил правильно, или 0 иначе. На основе Suchow и др. . 55 , входными данными модели были массив различий направлений целевой выборки и теста и массив ответов наблюдателя. На выходе модели была оценка параметров g , mode SD и SD var .MemToolbox использует байесовский вывод для получения распределения вероятностей по значениям параметров. Это распределение вероятностей описывает разумность параметров после рассмотрения наблюдаемых данных в свете предшествующего распределения (подробное описание подгонки модели и оценки параметров см. В Suchow и др. , 55 ). Модель VP была адаптирована ко всему набору данных каждого наблюдателя. Поскольку в предыдущем анализе мы не обнаружили какой-либо существенной разницы между различными используемыми направлениями маскирования, модель была адаптирована только к условию отсутствия маскирования и к условию маскирования, составленному из всех объединенных разностей направлений выборки и маски.
Е. Тестовая ячейка, занимающая то же пространственное положение целевой выборки), и присвоили значение 1, если наблюдатель ответил правильно, или 0 иначе. На основе Suchow и др. . 55 , входными данными модели были массив различий направлений целевой выборки и теста и массив ответов наблюдателя. На выходе модели была оценка параметров g , mode SD и SD var .MemToolbox использует байесовский вывод для получения распределения вероятностей по значениям параметров. Это распределение вероятностей описывает разумность параметров после рассмотрения наблюдаемых данных в свете предшествующего распределения (подробное описание подгонки модели и оценки параметров см. В Suchow и др. , 55 ). Модель VP была адаптирована ко всему набору данных каждого наблюдателя. Поскольку в предыдущем анализе мы не обнаружили какой-либо существенной разницы между различными используемыми направлениями маскирования, модель была адаптирована только к условию отсутствия маскирования и к условию маскирования, составленному из всех объединенных разностей направлений выборки и маски.
Результаты модели переменной точности
На рисунке 3 показана оценка параметров модели переменной точности. Для скорости угадывания ( г, ) (рис. 3a) смешанный дисперсионный анализ выявил значительный эффект группы ( F 2,34 = 9,734, p <0,001, η p 2 = 0,364), существенное влияние условия маскировки ( F 1,34 = 94,716, p <0,001, η p 2 = 0.735), но нет значимого взаимодействия между группой и условием маскировки ( F 2,34 = 1,465, p = 0,245, η p 2 = 0,0793). Для группы апостериорные сравнения с использованием FDR при 0,05 выявили значительную разницу между AVGP и CON ( скорректированный-p = 0,006), между NAVGP и CON ( скорректированный-p = 0,0001), но не было значительной разницы между AVGP и NAVGP ( скорректированный-p = 0,255), предполагая в целом более высокий уровень угадывания в CON. Более высокая скорость угадывания была также очевидна в условии маскирования по сравнению с условием отсутствия маскирования (средняя разница: 0,219, SE: 0,0223).
Более высокая скорость угадывания была также очевидна в условии маскирования по сравнению с условием отсутствия маскирования (средняя разница: 0,219, SE: 0,0223).
Для точности режима ( Mode SD ) (рис. 3b) смешанный дисперсионный анализ не выявил какого-либо значимого основного эффекта или взаимодействия (группа: F 2,34 = 0,386, p = 0,682, η p 2 = 0,022; условие маскировки: F 1,34 = 0,542, p = 0,467, η p 2 = 0.0157; группа взаимодействия x условие маскировки: F 2,34 = 1,517, p = 0,234, η p 2 = 0,0819). Кроме того, из рис. 3b, кажется, существует линейная тенденция для условия отсутствия маскирования, при этом режим SD линейно увеличивается для трех групп. Анализ тенденций Jonckheere-Terpstra не выявил значимой тенденции для порядков AVGP, NAVGP и CON ( p = 0,161).
Для вариабельности точности ( SD var ) (рис. 3c) смешанный дисперсионный анализ не выявил значимого влияния группы ( F 2,34 = 2,675, p = 0,083, η p 2 = 0,136) и условия маскировки ( F 1 , 34 = 0,001, p = 0,971, η p 2 = 0,0001. Однако условие маскирования взаимодействия x группа было значимым ( F 2,34 = 4,675, p = 0,016, η p 2 = 0,216). Для взаимодействия, апостериорные сравнения с использованием FDR на 0.05 выявил значительную разницу между AVGP и CON для условия отсутствия маскирования ( скорректированный-p = 0,021), но не существенную разницу между AVGP и NAVGP ( скорректированный-p = 0,229) и между NAVGP и CON ( скорректированный-p = 0,237). Кроме того, апостериорные сравнения также выявили почти значимую разницу между условиями отсутствия маскирования и маскирования только для CON ( скорректированный p = 0,051).
3c) смешанный дисперсионный анализ не выявил значимого влияния группы ( F 2,34 = 2,675, p = 0,083, η p 2 = 0,136) и условия маскировки ( F 1 , 34 = 0,001, p = 0,971, η p 2 = 0,0001. Однако условие маскирования взаимодействия x группа было значимым ( F 2,34 = 4,675, p = 0,016, η p 2 = 0,216). Для взаимодействия, апостериорные сравнения с использованием FDR на 0.05 выявил значительную разницу между AVGP и CON для условия отсутствия маскирования ( скорректированный-p = 0,021), но не существенную разницу между AVGP и NAVGP ( скорректированный-p = 0,229) и между NAVGP и CON ( скорректированный-p = 0,237). Кроме того, апостериорные сравнения также выявили почти значимую разницу между условиями отсутствия маскирования и маскирования только для CON ( скорректированный p = 0,051).
В целом, аппроксимация данных точности с помощью модели VP 50 показала, что эти три группы не различаются с точки зрения точности представления памяти (т. е.е., Режим SD ). Тем не менее, CON продемонстрировали значительно более высокую скорость угадывания, чем видеоигры, а также более высокую вариабельность точности ( SD var ), чем AVGP. Кроме того, для CONs была обнаружена почти значительная разница между условиями отсутствия маскирования и маскирования для SD var .
е.е., Режим SD ). Тем не менее, CON продемонстрировали значительно более высокую скорость угадывания, чем видеоигры, а также более высокую вариабельность точности ( SD var ), чем AVGP. Кроме того, для CONs была обнаружена почти значительная разница между условиями отсутствия маскирования и маскирования для SD var .
Время реакции
На рисунке 4 показан журнал 10 времен реакции (RT) только для правильных ответов. Перед преобразованием RT в журнал 10 для каждого наблюдателя и условия резко выделяющиеся RT были отфильтрованы в соответствии с процедурой Лашо и Рено 56 .В частности, мы рассчитали медиану RT, и испытания, в которых RT составляли ± 3 MAD (медиана абсолютного отклонения) или более от медианы, были исключены из анализа. Смешанный дисперсионный анализ по логарифму 10 (RT s ) выявил значительный эффект группы ( F 2,34 = 3,587, p = 0,039, η p 2 = 0,174), значительный эффект разницы направлений между образцом и маской ( F 3,376,114,78 = 4. 24, p = 0,005, η p 2 = 0,111), но нет взаимодействия между разницей образца и маски и группой ( F 10,170 = 0,422, p = 0,934, η p 2 = 0,024). Когда предположение о сферичности нарушалось, степени свободы корректировались с помощью поправки Гринхауса-Гейссера. Для группы апостериорные сравнения с использованием FDR при 0,05 показали значительную разницу между AVGP и NAVGP ( скорректированный-p = 0.039), но нет разницы между CON и AVGP ( отрегулированный-p = 0,135) и между CON и NAVGP ( отрегулированный-p = 0,276). Что касается эффекта разности направлений между образцом и маской, апостериорные сравнения с использованием FDR при 0,05 показали, что время реакции в условиях отсутствия маскирования было систематически больше, чем время реакции для всех других различий направления образца и маски (все Adjust-p значения <0,01). Кроме того, не было значительных различий во времени реакции между другими различиями направления маски образца (все значения с поправкой-p > 0.
24, p = 0,005, η p 2 = 0,111), но нет взаимодействия между разницей образца и маски и группой ( F 10,170 = 0,422, p = 0,934, η p 2 = 0,024). Когда предположение о сферичности нарушалось, степени свободы корректировались с помощью поправки Гринхауса-Гейссера. Для группы апостериорные сравнения с использованием FDR при 0,05 показали значительную разницу между AVGP и NAVGP ( скорректированный-p = 0.039), но нет разницы между CON и AVGP ( отрегулированный-p = 0,135) и между CON и NAVGP ( отрегулированный-p = 0,276). Что касается эффекта разности направлений между образцом и маской, апостериорные сравнения с использованием FDR при 0,05 показали, что время реакции в условиях отсутствия маскирования было систематически больше, чем время реакции для всех других различий направления образца и маски (все Adjust-p значения <0,01). Кроме того, не было значительных различий во времени реакции между другими различиями направления маски образца (все значения с поправкой-p > 0. 05).
05).
Время реакции в эксперименте с кратковременной зрительной памятью. Отфильтрованный журнал 10 время реакции (мс) правильных ответов как функция разности направлений между образцом и маской. Результаты условия отсутствия маски нанесены вдоль крайнего левого положения оси абсцисс. Цвета обозначают результаты трех протестированных групп. Планки погрешностей ± SEM.
Дополнительный дисперсионный анализ для повторных измерений с анализом тенденций разностей направлений выборка-маска выявил значительную линейную ( F 1,34 = 8.217, p = 0,007, частичный η 2 = 0,195) и кубический ( F 1,34 = 12,74, p = 0,001, частичный η 2 = 0,273) тенденции. Тенденции более высокого порядка не были значимыми (квадратичный, F 1,34 = 2,09, p = 0,157, частичный η 2 = 0,058; четвертый, F 1,34 = 1,192 , p = 0,283, частичный η 2 = 0. 034; quintic, F 1,34 = 0,124, p = 0,727, частичный η 2 = 0,004).
034; quintic, F 1,34 = 0,124, p = 0,727, частичный η 2 = 0,004).
Кроме того, односторонний дисперсионный анализ, проведенный между log 10 (RT s ) AVGP, NAVGP и CON в условиях отсутствия маскирования, выявил значительный эффект группы ( F 2,34 = 3,757, p = 0,034). Апостериорные сравнения с использованием FDR при 0,05 показали значительную разницу между AVGP и NAVGP ( скорректированный-p = 0.03), но нет разницы между AVGP и CON ( отрегулированный-p = 0,151) и между NAVGP и CON ( отрегулированный-p = 0,22). В среднем CON демонстрируют время реакции, которое находится между AVGP и NAVGP. Кроме того, время отклика NAVGP было больше, чем время реакции AVGP, но NAVGP показали значения производительности, аналогичные значениям производительности AVGP. Чтобы лучше понять этот компромисс между скоростью и точностью между двумя группами видеоигр, данные о времени реакции были сопоставлены со стандартной моделью решения о распространении 57,58,59 .
Анализ модели диффузии
Для комбинированного анализа времени отклика и уровня точности мы приспособили стандартную модель решения диффузии 57,58,59 к данным всех участников. Модель диффузии — это модель перцептивных решений с двумя альтернативами 60 . Он основан на предположении, что время принятия решения может быть описано с помощью процесса распространения Винера с учетом двух критериев отклика, представляющих пороговые значения доказательств для каждой из двух альтернатив.Из-за случайных возмущений критерий ответа достигается иногда раньше, иногда позже, а также может достигать критерия, связанного с неправильным ответом (рис. 5). Следовательно, диффузионная модель позволяет проводить полный анализ RT, включая точность ответа и распределение как правильных, так и неправильных ответов.
Рисунок 5 Диффузионная модель времени отклика. Задержка принятия решения моделируется как время первого прохождения винеровского процесса с дрейфом µ , начиная с z , до одного из двух пороговых значений свидетельства, помещенного в , и 0. Из-за случайного шума первый проход происходит в разное время и при разных критериях. Соответствующие функции плотности первого прохода нанесены на график для любого критерия. В дополнение к задержке принятия решения существует задержка без принятия решения T er . В полной модели предполагается, что дрейф, начальная точка и время отсутствия решения варьируются от испытания к испытанию. Предполагается, что дрейф имеет нормальное распределение со средним значением v и дисперсией η 2 .Предполагается, что начальная точка и время отсутствия решения равномерно распределены с шириной распределения с z и с t соответственно.
Из-за случайного шума первый проход происходит в разное время и при разных критериях. Соответствующие функции плотности первого прохода нанесены на график для любого критерия. В дополнение к задержке принятия решения существует задержка без принятия решения T er . В полной модели предполагается, что дрейф, начальная точка и время отсутствия решения варьируются от испытания к испытанию. Предполагается, что дрейф имеет нормальное распределение со средним значением v и дисперсией η 2 .Предполагается, что начальная точка и время отсутствия решения равномерно распределены с шириной распределения с z и с t соответственно.
Мы приспособили стандартную модель диффузии с изменением скорости дрейфа, начальной точки и времени без принятия решения от испытания к испытанию к распределениям RT (т. Е. 10%, 30%, 50%, 70% и 90%). квантили) испытаний без маскировки и испытаний с маскированием между выборкой и интервалами тестирования. Поскольку мы не обнаружили значительного влияния разницы направлений выборки и маски на точность, данные RT были объединены для всех условий маскирования.
Поскольку мы не обнаружили значительного влияния разницы направлений выборки и маски на точность, данные RT были объединены для всех условий маскирования.
Стандартная версия модели диффузии имеет семь свободных параметров: в дополнение к разделению барьеров ( a ), скорости дрейфа ( v ), начальной точке ( z ) и времени отсутствия решения ( T er ), модель включает экспериментальное изменение скорости дрейфа ( η ), начальную точку ( с, z ) и время без принятия решения ( с, t ). При подборе этой модели мы учли отдельные скорости дрейфа для решений в испытаниях с маскированием и без него.Разница в скоростях дрейфа — если таковая присутствует — будет отражать эффект маскирования, отражая, насколько вредна маска для представления в памяти образца стимула. Оказалось, что фиксация начальной точки на a /2 (то есть объективное принятие решения) не сильно повлияла на аппроксимацию модели, поэтому мы зафиксировали этот параметр и установили его вариацию равной нулю. У всей модели было шесть свободных параметров для объяснения распределений RT для правильных и ошибочных RT в двух условиях (т. Е. Четыре распределения).
У всей модели было шесть свободных параметров для объяснения распределений RT для правильных и ошибочных RT в двух условиях (т. Е. Четыре распределения).
Прогнозы диффузионной модели были получены с использованием эффективной оценки распределения первого прохода с переменным дрейфом 61 и численного интегрирования для учета переменного времени отсутствия решения 62 . Оценки параметров были получены с помощью оценки максимального правдоподобия 63 квантилей с использованием вышеупомянутых квантилей. Полученные оценки модели были проверены на групповые различия с помощью однофакторного дисперсионного анализа. Поскольку это включало шесть статистических тестов, по одному для каждого параметра, результаты были скорректированы для множественных сравнений с использованием коррекции FDR 48 .Только параметры, которые демонстрировали значимые групповые различия после коррекции FDR на 0,05, впоследствии были протестированы при сравнении отдельных групп с помощью (двусторонних) тестов t .
Результаты
Оценки параметров модели находились в обычном диапазоне для задачи перцептивного решения (Таблица 1), и общее соответствие модели было приемлемым (Рис. 6). Соответствие RT для распределений RT в условиях маскирования было очень хорошим (рис. 6b), тогда как в условиях без маскирования соответствие было немного хуже (рис.6а). Это отсутствие соответствия было обнаружено во время выбора модели, и было обнаружено, что дополнительный свободный параметр для условия отсутствия маскирования (т. Е. Отдельный критерий ответа или время задержки без принятия решения) повысил качество соответствия. Однако количественное увеличение степени согласия модели было незначительным, поскольку условие отсутствия маскирования содержало значительно меньше испытаний, чем условие маскирования. Поэтому мы не включали отдельную задержку без принятия решения для этих испытаний.Все параметры модели диффузии, кроме скорости дрейфа, одинаковы для разных условий. Установка одинаковой скорости дрейфа приведет к идентичным предсказаниям модели и, следовательно, к значительно худшему соответствию модели (рис. 6). С точки зрения статистики, скорости дрейфа между двумя условиями значительно различаются для AVGP ( X 2 = 23,16, df = 12, p = 0,03) и CON ( X 2 = 60,78, df = 15, p <0.001), но не для NAVGP ( X 2 = 16,05, df = 10, p = 0,10).
6). С точки зрения статистики, скорости дрейфа между двумя условиями значительно различаются для AVGP ( X 2 = 23,16, df = 12, p = 0,03) и CON ( X 2 = 60,78, df = 15, p <0.001), но не для NAVGP ( X 2 = 16,05, df = 10, p = 0,10).
Эмпирическая (10%, 30%, 50% / медиана, 70% и 90% квантили плюс общая вероятность ответа, кружки) и предсказанная (немаркированные точки, соединенные линиями) кумулятивная функция распределения правильных (сплошные кружки) и линии) и ответы на ошибки (светлые кружки и пунктирные линии).( a ) Прогнозы данных и модели для условия отсутствия маскирования. ( b ) Прогнозы данных и модели для (объединенного) условия маскирования.
Мы получили значительную групповую разницу для скорости дрейфа в испытаниях по маскировке ( F 2,34 = 9,40, отрегулированный-p = 0,008).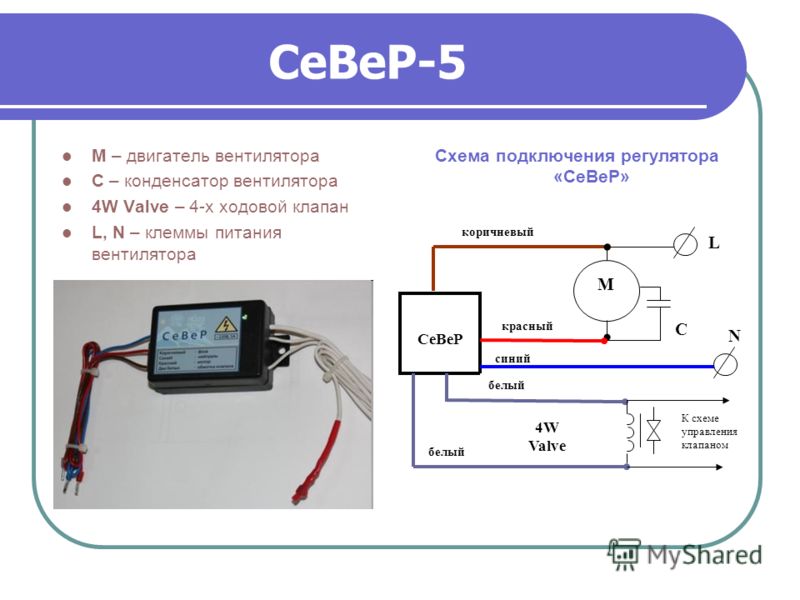 Также были существенные различия между скоростью дрейфа в испытаниях без маскирования и задержкой времени без принятия решения, но эти различия больше не были значимыми после коррекции FDR.Что наиболее важно, мы не нашли доказательств наличия различных критериев ответа ( a ) в трех группах ( F 2,35 = 2,20, скорректированный-p = 0,46), что говорит против точности скорости. компромисс как объяснение наблюдаемых групповых различий в точности и RT. Скорость дрейфа в испытаниях маскировки была значительно выше для AVGP ( v , маска = 0,16), чем для CON ( v маска = 0,1, t 25 = 2.54, p = 0,018) и значительно выше для NAVGP ( v маска = 0,23), чем для CON ( t 23 = 3,93, p = 0,001). Также было существенное различие между AVGP и NAVGP ( t 20 = –2,1, p = 0,049).
Также были существенные различия между скоростью дрейфа в испытаниях без маскирования и задержкой времени без принятия решения, но эти различия больше не были значимыми после коррекции FDR.Что наиболее важно, мы не нашли доказательств наличия различных критериев ответа ( a ) в трех группах ( F 2,35 = 2,20, скорректированный-p = 0,46), что говорит против точности скорости. компромисс как объяснение наблюдаемых групповых различий в точности и RT. Скорость дрейфа в испытаниях маскировки была значительно выше для AVGP ( v , маска = 0,16), чем для CON ( v маска = 0,1, t 25 = 2.54, p = 0,018) и значительно выше для NAVGP ( v маска = 0,23), чем для CON ( t 23 = 3,93, p = 0,001). Также было существенное различие между AVGP и NAVGP ( t 20 = –2,1, p = 0,049).
Эти результаты говорят против объяснения различий между группами, связанного с компромиссом скорости и точности. Вместо этого различия, кажется, отражают качество представления VSTM: во всех трех группах маска после образца стимула отрицательно повлияла на представление в VSTM, и этот эффект маскировки был наиболее выражен в CON.В этой группе представление VSTM было особенно восприимчивым к маске. Но даже в условиях без маски представление VSTM в конце периода 3,2 с было лучше у игроков в видеоигры, чем у игроков, не играющих в видеоигры. Тот факт, что у AVGP были самые быстрые ответы, отчасти объясняется более низкой задержкой времени без принятия решения. Хотя этот эффект не является значительным после коррекции FDR, задержка без принятия решения была в среднем на 120-180 мс ниже в группе AVGP. Причину такой низкой задержки трудно определить; Процессы без принятия решения включают в себя, среди прочего, такие процессы, как кодирование тестового стимула, извлечение образца стимула из VSTM и двигательный ответ.Любой из этих процессов мог способствовать более быстрой задержке без принятия решения.
Вместо этого различия, кажется, отражают качество представления VSTM: во всех трех группах маска после образца стимула отрицательно повлияла на представление в VSTM, и этот эффект маскировки был наиболее выражен в CON.В этой группе представление VSTM было особенно восприимчивым к маске. Но даже в условиях без маски представление VSTM в конце периода 3,2 с было лучше у игроков в видеоигры, чем у игроков, не играющих в видеоигры. Тот факт, что у AVGP были самые быстрые ответы, отчасти объясняется более низкой задержкой времени без принятия решения. Хотя этот эффект не является значительным после коррекции FDR, задержка без принятия решения была в среднем на 120-180 мс ниже в группе AVGP. Причину такой низкой задержки трудно определить; Процессы без принятия решения включают в себя, среди прочего, такие процессы, как кодирование тестового стимула, извлечение образца стимула из VSTM и двигательный ответ.Любой из этих процессов мог способствовать более быстрой задержке без принятия решения.
Проблема с применением стандартной модели диффузии в этой ситуации заключается в том, что она не учитывает угадывание из-за полной потери представления VSTM, такого как модель переменной точности. Чтобы преодолеть этот недостаток, мы применили модель распространения, которая учитывает, что решение зависит от неповрежденного представления в VSTM. Если это представление потеряно, дрейф обязательно должен быть (близок к нулю).Мы учли это путем подбора модели диффузии смеси, в которой некоторые испытания моделируются стандартной моделью, как описано в предыдущем разделе, а другие испытания описываются моделью диффузии с нулевым дрейфом. При нулевом дрейфе модель несмещенного решения может предсказать «предположение», поскольку достижение любого критерия происходит с вероятностью 1/2. Вероятность потери представления VSTM должна оцениваться по данным; это добавляет к модели два свободных параметра, поскольку эта вероятность предположительно различается в условиях маскирования и отсутствия маскирования. Еще два параметра (критерий отклика a и время отсутствия решения T er ) для пробных предположений были необходимы для получения приемлемого соответствия. С другой стороны, скорость дрейфа больше не различалась между условиями маски и без маскировки, поэтому мы ограничили их равенством. Предполагаемая диффузионная модель имела 9 свободных параметров.
Еще два параметра (критерий отклика a и время отсутствия решения T er ) для пробных предположений были необходимы для получения приемлемого соответствия. С другой стороны, скорость дрейфа больше не различалась между условиями маски и без маскировки, поэтому мы ограничили их равенством. Предполагаемая диффузионная модель имела 9 свободных параметров.
Подгонка модели диффузии, которая учитывает потерю представления в VSTM, принимая решение о нулевом дрейфе, сравнима со стандартной моделью диффузии, а оцененные параметры точно отражают параметры стандартной модели.Тем не менее, скорости дрейфа больше не сильно различаются между группами ( F 2,34 = 0,84, скорректированный-p = 0,99). Вместо этого вероятность потери представления VSTM в условиях маскирования значительно различается для трех групп ( F 2,34 = 10,5, скорректированный-p = 0,007). Апостериорные сравнения с использованием FDR при 0,05 показали, что AVGP ( t 25 = –3,73, p = 0,001) и NAVGP ( t 23 = –3. 25, p = 0,004) угадали значительно меньше, чем МИН. Другими словами, у CON было значительно больше испытаний, в которых представление VSTM было потеряно. Две группы геймеров существенно не различались ( t 20 = 0,50, p = 0,62). Мы не обнаружили такого эффекта в условиях отсутствия маскировки, и ни один из других параметров существенно не отличался между группами. Это включает в себя скорость дрейфа, предполагающую, что, если представление в VSTM было неизменным, качество информации, доступной для принятия решения, было примерно одинаковым во всех трех группах, независимо от игрового опыта.Это по существу подтверждает выводы, сделанные на основе модели переменной точности (см. Выше), однако при использовании модели диффузии также учитывается время отклика.
25, p = 0,004) угадали значительно меньше, чем МИН. Другими словами, у CON было значительно больше испытаний, в которых представление VSTM было потеряно. Две группы геймеров существенно не различались ( t 20 = 0,50, p = 0,62). Мы не обнаружили такого эффекта в условиях отсутствия маскировки, и ни один из других параметров существенно не отличался между группами. Это включает в себя скорость дрейфа, предполагающую, что, если представление в VSTM было неизменным, качество информации, доступной для принятия решения, было примерно одинаковым во всех трех группах, независимо от игрового опыта.Это по существу подтверждает выводы, сделанные на основе модели переменной точности (см. Выше), однако при использовании модели диффузии также учитывается время отклика.
Кривые обучения
Предыдущие исследования 64 утверждали, что общие преимущества, наблюдаемые в играх в видеоигры, могут быть связаны с тем, что AVGP обладают улучшенными способностями по отношению к «, обучающемуся ». То есть, когда они сталкиваются с новой задачей, AVGP начинают не отличаться от CON, но они могут быстрее изучать соответствующую статистику задачи, что приводит к более быстрому повышению производительности в зависимости от воздействия задание.Однако в нашем исследовании мы не обнаружили различий в значениях производительности между AVGP и NAVGP во всех тестируемых условиях маскирования, что позволяет предположить, что в отношении этого типа задачи с памятью игра в видеоигры без действий связана примерно с теми же преимуществами, что и это игра в видеоигры.
То есть, когда они сталкиваются с новой задачей, AVGP начинают не отличаться от CON, но они могут быстрее изучать соответствующую статистику задачи, что приводит к более быстрому повышению производительности в зависимости от воздействия задание.Однако в нашем исследовании мы не обнаружили различий в значениях производительности между AVGP и NAVGP во всех тестируемых условиях маскирования, что позволяет предположить, что в отношении этого типа задачи с памятью игра в видеоигры без действий связана примерно с теми же преимуществами, что и это игра в видеоигры.
В текущем исследовании наблюдатели выполнили в общей сложности 288 испытаний, разделенных на 12 блоков. Чтобы проверить, были ли игроки в видеоигры с самого начала лучше, чем игроки, не играющие в видеоигры, или все игроки в видеоигры начинали с одного и того же уровня, при этом разница сначала проявляется в процессе выполнения задачи, как можно было бы спрогнозировать гипотеза обучения обучению 64 , 12 блоков были сгруппированы в бункеры по два блока, в результате получилось 6 бинов. Мы будем называть мусорные ведра учебными сессиями. Биннинг был необходим, потому что в каждом блоке количество условий различалось, поэтому нам пришлось объединить как минимум два блока, чтобы оценить, как производительность меняется в зависимости от воздействия на задачу. Чтобы увеличить статистическую мощность этого сравнения, данные по условиям маскирования были объединены, поскольку мы не обнаружили существенной разницы между значениями производительности для различных направлений маскирования. Мы также оценили кривые обучения для условия отсутствия маскировки.{-b}) $$
Мы будем называть мусорные ведра учебными сессиями. Биннинг был необходим, потому что в каждом блоке количество условий различалось, поэтому нам пришлось объединить как минимум два блока, чтобы оценить, как производительность меняется в зависимости от воздействия на задачу. Чтобы увеличить статистическую мощность этого сравнения, данные по условиям маскирования были объединены, поскольку мы не обнаружили существенной разницы между значениями производительности для различных направлений маскирования. Мы также оценили кривые обучения для условия отсутствия маскировки.{-b}) $$
(1)
Рисунок 7 Кривые обучения для игроков в видеоигры и игроков, не играющих в видеоигры, с долей правильных ответов как функцией сеанса обучения. ( a ) Условие отсутствия маскировки. ( b ) Условие маскировки. Каждому сеансу обучения соответствует бункер, в который были объединены данные из двух последовательных экспериментальных блоков. Кривые представляют собой сложную функцию мощности, адаптированную к значениям производительности (см. Более подробную информацию в тексте).Планки погрешностей ± SEM.
Кривые представляют собой сложную функцию мощности, адаптированную к значениям производительности (см. Более подробную информацию в тексте).Планки погрешностей ± SEM.
Функция была преобразована из усовершенствованной степенной функции Bejjanki et al . 64 . Параметр a указывает точность в первом сеансе обучения, b — скорость обучения (меньшие значения b указывают на медленное улучшение производительности во время сеансов обучения), а c указывает на асимптотическую точность после произвольно большого количество учебных занятий. Поскольку параметры a и c указывают на точность, они были ограничены диапазоном от 0 до 1, тогда как параметр b был вынужден принимать только положительные значения для достижения строго возрастающих кривых обучения.
Используемая процедура подбора и выбор модели были аналогичны описанным в Bejjanki et al . 64 Для трех групп полностью насыщенная модель состояла из девяти параметров (по одному параметру a , b и c на группу). Модель с максимальными ограничениями, т. Е. Модель, которая постулировала отсутствие изменений между группами, имела только три параметра ( a , b и c ) и предполагала, что эти три параметра были одинаковыми для всех групп (см. Таблица 2).Между полностью насыщенной моделью и максимально ограниченной моделью была подогнана решетка моделей с различным числом параметров. Выбор наиболее подходящей модели был основан на следующем тесте F :
Модель с максимальными ограничениями, т. Е. Модель, которая постулировала отсутствие изменений между группами, имела только три параметра ( a , b и c ) и предполагала, что эти три параметра были одинаковыми для всех групп (см. Таблица 2).Между полностью насыщенной моделью и максимально ограниченной моделью была подогнана решетка моделей с различным числом параметров. Выбор наиболее подходящей модели был основан на следующем тесте F :
$$ F = \ frac {(RS {S} _ {1} -RS {S} _ {2}) / (d {f } _ {1} -d {f} _ {2})} {RS {S} _ {2} / d {f} _ {2}} $$
(2)
, где RSS 1 и df 1 — это остаточная сумма квадратов и степеней свободы более простой модели, а RSS 2 и df 2 — остаточная сумма квадратов и степеней свободы более сложной модели.Соответствующая вероятность ( p ) может быть вычислена как:
$$ p = fcdf (F, d {f} _ {1} -d {f} _ {2}, d {f} _ {2}) $$
(3)
, где fcdf — кумулятивная функция распределения F 65 . Если результирующее значение p было выше уровня значимости (0,05), то более простая модель, вероятно, была правильной. С другой стороны, если значение p было ниже уровня значимости, то модель с большим количеством параметров, вероятно, была правильной.Следует также отметить, что тест F может использоваться только с вложенными моделями (т.е. модель A вложена в модель B, если параметры в модели A являются подмножеством параметров в модели B). Сравнение моделей с одинаковым количеством параметров (то есть с одинаковыми степенями свободы) проводилось с использованием как теста информационного критерия Акаике (AIC), так и байесовского информационного критерия (BIC). В этом случае, вероятно, будет правильной модель с более низкими значениями AIC и BIC. В таблице 3 представлена решетка моделей, подогнанных к значениям производительности.Все возможные пары моделей сравнивались без повторов.
Если результирующее значение p было выше уровня значимости (0,05), то более простая модель, вероятно, была правильной. С другой стороны, если значение p было ниже уровня значимости, то модель с большим количеством параметров, вероятно, была правильной.Следует также отметить, что тест F может использоваться только с вложенными моделями (т.е. модель A вложена в модель B, если параметры в модели A являются подмножеством параметров в модели B). Сравнение моделей с одинаковым количеством параметров (то есть с одинаковыми степенями свободы) проводилось с использованием как теста информационного критерия Акаике (AIC), так и байесовского информационного критерия (BIC). В этом случае, вероятно, будет правильной модель с более низкими значениями AIC и BIC. В таблице 3 представлена решетка моделей, подогнанных к значениям производительности.Все возможные пары моделей сравнивались без повторов.
 Таблица 3 Решетка моделей, подходящих для учебных занятий трех групп и для условий отсутствия маскировки и маскировки. f 1 ( x ) обозначает функции, соответствующие группе AVGP, f 2 ( x ) обозначает функции, соответствующие группе NAVGP, а f 3 ( x ) функции, установленные для Минусы группы.
Таблица 3 Решетка моделей, подходящих для учебных занятий трех групп и для условий отсутствия маскировки и маскировки. f 1 ( x ) обозначает функции, соответствующие группе AVGP, f 2 ( x ) обозначает функции, соответствующие группе NAVGP, а f 3 ( x ) функции, установленные для Минусы группы. Для условия отсутствия маскирования (рис. 7a) модель наилучшего соответствия соответствовала модели с ограничениями 4, то есть модели с пятью параметрами, в которой только параметр a варьировался по трем группам. Как указано выше, разница в параметрах и указывает на разную точность между группами в первом сеансе обучения. Ограниченная модель 4 имела глобальное значение R 2 = 0,851. Параметр a был 0,79 (SE: 0,02) для группы AVGP, 0.86 (SE: 0,02) для группы NAVG и 0,74 (SE: 0,02) для группы CON. Ограниченная модель 4 была значительно лучше, чем полностью насыщенная модель (то есть модель с 9 параметрами) ( F 4,9 = 1,17, p = 0,39), лучше, чем максимально ограниченная модель ( F 2,13 = 15,2, p <0,001), и лучше, чем модель, в которой только параметр b (т. е. скорость обучения) варьировался по группам (т.е. модель с ограничениями 5) с более низкими значениями AIC и BIC ( Модель с ограничениями AIC 4 = −117.43, AIC The Restricted Model 5 = −116,43; Ограниченная модель BIC 4 = -119,73, ограниченная модель BIC 5 = -118,72). Ограниченная модель 4 также была лучше, чем модель, в которой только параметр c варьировался по группам (т.е. Ограниченная модель 6; Ограниченная модель AIC 6 = -113,35; ограниченная модель BIC 6 = -115,64). Модель с ограничениями 4 также была лучше, чем все модели с 7 параметрами (4 с ограничениями по сравнению с ограничениями 1: F 2,11 = 0,62, p = 0,56; 4 с ограничениями противОграниченная модель 2: F 2,11 = 2,8, p = 0,1; Ограниченная модель 4 по сравнению с ограниченной моделью 3: F 2,11 = 2,87, p = 0,1).
е. скорость обучения) варьировался по группам (т.е. модель с ограничениями 5) с более низкими значениями AIC и BIC ( Модель с ограничениями AIC 4 = −117.43, AIC The Restricted Model 5 = −116,43; Ограниченная модель BIC 4 = -119,73, ограниченная модель BIC 5 = -118,72). Ограниченная модель 4 также была лучше, чем модель, в которой только параметр c варьировался по группам (т.е. Ограниченная модель 6; Ограниченная модель AIC 6 = -113,35; ограниченная модель BIC 6 = -115,64). Модель с ограничениями 4 также была лучше, чем все модели с 7 параметрами (4 с ограничениями по сравнению с ограничениями 1: F 2,11 = 0,62, p = 0,56; 4 с ограничениями противОграниченная модель 2: F 2,11 = 2,8, p = 0,1; Ограниченная модель 4 по сравнению с ограниченной моделью 3: F 2,11 = 2,87, p = 0,1).
Был проведен дополнительный анализ, чтобы проверить, различается ли параметр a между видеоиграми, а также между игроками и элементами управления.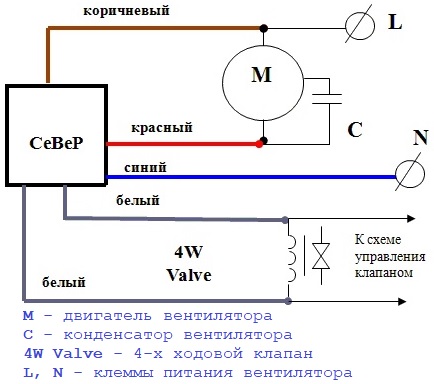 Для этого ограниченная модель 4 была адаптирована отдельно к каждому набору данных, но параметры b и c были зафиксированы на 0.41 и 0,99 соответственно. Эти значения были взяты из предыдущего глобального подбора , в котором одна и та же модель (Ограниченная модель 4) была подобрана для трех групп. Следовательно, для целей этого анализа только параметр a мог свободно меняться и был ограничен, чтобы принимать значения от 0 до 1.
Для этого ограниченная модель 4 была адаптирована отдельно к каждому набору данных, но параметры b и c были зафиксированы на 0.41 и 0,99 соответственно. Эти значения были взяты из предыдущего глобального подбора , в котором одна и та же модель (Ограниченная модель 4) была подобрана для трех групп. Следовательно, для целей этого анализа только параметр a мог свободно меняться и был ограничен, чтобы принимать значения от 0 до 1.
При сравнении параметра a между AVGP и NAVGP анализ показал, что параметр a был разным для каждого набора данных (AIC тот же: −75.24, AIC другой: −81,55). Такое же различие было обнаружено между AVGP и CON (AIC такое же: -82,13, AIC другое: -83,57) и между NAVGP и CON (AIC такое же: -67,99, AIC другое: -82,38). Эти результаты предполагают, что в условиях отсутствия маскирования скорость обучения одинакова во всех трех группах, и эти три группы имеют одинаковую асимптотическую точность после сколь угодно большого количества учебных занятий. Однако в начале эксперимента видеоигры показали лучшие результаты по сравнению с неигровыми.Кроме того, наш анализ также показал, что в условиях отсутствия маскирования NAVGP демонстрируют значительно более высокие начальные показатели точности, чем AVGP.
Однако в начале эксперимента видеоигры показали лучшие результаты по сравнению с неигровыми.Кроме того, наш анализ также показал, что в условиях отсутствия маскирования NAVGP демонстрируют значительно более высокие начальные показатели точности, чем AVGP.
Для условия маскирования (рис. 7b) наилучшей подходящей моделью оказалась модель с ограничениями 6, то есть модель с пятью параметрами, в которой только параметр c варьировался между группами. Как указано выше, параметр c указывает на асимптотическую точность после сколь угодно большого количества сеансов обучения. Ограниченная модель 6 имела глобальное значение R 2 = 0.946. Параметр c для группы AVGP составлял 0,91 (SE: 0,06), для группы NAVG был 0,97 (SE: 0,07) и для группы CON был 0,75 (SE: 0,03). Модель с ограничениями 6 и была значительно лучше, чем модель с полным насыщением (т. Е. Модель с 9 параметрами) ( F 4,9 = 1,87, p = 0,2), лучше, чем модель с максимальными ограничениями ( F 2,13 = 49,58, p <0,001), и лучше, чем модель, в которой только параметр a варьировался по группам (т. е., модель с ограничениями 4), с более низким AIC и BIC (модель с ограничениями AIC 6 = −120,07, модель с ограничениями AIC 4 = −101,11; модель с ограничениями BIC 6 = −122,36, модель с ограничениями BIC 4 = −103,40). Ограниченная модель 6 также была лучше, чем модель, в которой только параметр b (то есть скорость обучения) варьировался в разных группах (т.е. ограниченная модель 5; ограниченная модель AIC 5 = -119,79; ограниченная модель 5 BIC = -122,08). Ограниченная модель 6 также была лучше, чем все модели с 7 параметрами (Ограниченная модель 6 vs.Ограниченная модель 1: F 2,11 = 3,31, p = 0,075; Ограниченная модель 6 и ограниченная модель 2: F 2,11 = 2,28, p = 0,15; Ограниченная модель 6 по сравнению с ограниченной моделью 3: F 2,11 = 1,42, p ( = 0,28).
е., модель с ограничениями 4), с более низким AIC и BIC (модель с ограничениями AIC 6 = −120,07, модель с ограничениями AIC 4 = −101,11; модель с ограничениями BIC 6 = −122,36, модель с ограничениями BIC 4 = −103,40). Ограниченная модель 6 также была лучше, чем модель, в которой только параметр b (то есть скорость обучения) варьировался в разных группах (т.е. ограниченная модель 5; ограниченная модель AIC 5 = -119,79; ограниченная модель 5 BIC = -122,08). Ограниченная модель 6 также была лучше, чем все модели с 7 параметрами (Ограниченная модель 6 vs.Ограниченная модель 1: F 2,11 = 3,31, p = 0,075; Ограниченная модель 6 и ограниченная модель 2: F 2,11 = 2,28, p = 0,15; Ограниченная модель 6 по сравнению с ограниченной моделью 3: F 2,11 = 1,42, p ( = 0,28).
Был проведен дополнительный анализ, чтобы проверить, различается ли асимптотическая точность (т. Е. Параметр c ) между видеоиграми и между игроками и элементами управления. Для этого ограниченная модель 6 была приспособлена отдельно к каждому набору данных, но параметры a и b были зафиксированы на уровне 0,63 и 0,85 соответственно. Эти значения были взяты из предыдущей глобальной подгонки, в которой одна и та же модель (Ограниченная модель 6) была подогнана к трем группам. Следовательно, для целей этого анализа можно было изменять только параметр c . При сравнении скорости обучения между AVGP и NAVGP анализ показал, что асимптотическая точность была разной для каждого набора данных (AIC то же самое: -82.22, AIC другой: -86,50). Такое же различие было обнаружено между AVGP и CON (AIC такое же: -64,70, AIC другое: -82,53) и между NAVGP и CON (AIC такое же: -58,27, AIC другое: -83,72). Эти результаты предполагают, что в условиях маскировки три группы имели схожую производительность в начале эксперимента, а также демонстрировали схожую скорость обучения, но асимптотическая точность различалась между тремя группами, причем видеоигры показали более высокую точность, чем контрольные, после нескольких учебных занятий .
Для этого ограниченная модель 6 была приспособлена отдельно к каждому набору данных, но параметры a и b были зафиксированы на уровне 0,63 и 0,85 соответственно. Эти значения были взяты из предыдущей глобальной подгонки, в которой одна и та же модель (Ограниченная модель 6) была подогнана к трем группам. Следовательно, для целей этого анализа можно было изменять только параметр c . При сравнении скорости обучения между AVGP и NAVGP анализ показал, что асимптотическая точность была разной для каждого набора данных (AIC то же самое: -82.22, AIC другой: -86,50). Такое же различие было обнаружено между AVGP и CON (AIC такое же: -64,70, AIC другое: -82,53) и между NAVGP и CON (AIC такое же: -58,27, AIC другое: -83,72). Эти результаты предполагают, что в условиях маскировки три группы имели схожую производительность в начале эксперимента, а также демонстрировали схожую скорость обучения, но асимптотическая точность различалась между тремя группами, причем видеоигры показали более высокую точность, чем контрольные, после нескольких учебных занятий . Вдобавок кажется, что NAVGP демонстрируют значительно более высокую асимптотическую точность, чем AVGP и CON.
Вдобавок кажется, что NAVGP демонстрируют значительно более высокую асимптотическую точность, чем AVGP и CON.
Math | Фонд РДК Меланома
Фонд Меланомы Ричарда Дэвида Канна | 14 марта 2018 г. | Текущие новости, инженерия и математика, в новостях, меланома, RDK, Фонд Ричарда Дэвида Канна Меланомы, SAM, наука, STEM, студенты против меланомы, Sun Safe, Sun Safety, SunSmart America, Technology
Дерматологи также известны тем, что взимают плату со страховых компаний слишком часто.Страховые компании в ответ ограничили количество обслуживаемых ими дерматологов, чтобы получить меньшие выплаты. Но страховые компании не обошлись ни с дерматологом, ни с …Фонд Меланомы Ричарда Дэвида Канна | 14 февр.2018 г. | Инженерия и математика, Новости, Меланома, RDK, Фонд Ричарда Дэвида Канна Меланомы, SAM, Наука, STEM, Студенты против меланомы, Защита от солнца, Защита от солнца, Диспенсер для солнцезащитного крема, SunSmart America, Technology
Они начали составлять карту некоторых из самых огромные расстояния между некоторыми городами и ближайшим к ним дерматологом. Самое дальнее нанесенное на карту расстояние между двумя городами в Монтане составляло 144 мили (примерно 2 часа езды). Людям может быть чрезвычайно трудно не …
Самое дальнее нанесенное на карту расстояние между двумя городами в Монтане составляло 144 мили (примерно 2 часа езды). Людям может быть чрезвычайно трудно не …Фонд Меланомы Ричарда Дэвида Канна | 27 дек.2017 г. | Текущие новости, инженерия и математика, в новостях, Меланома, RDK, Фонд Ричарда Дэвида Канна Меланомы, SAM, Наука, STEM, Студенты против меланомы, Защита от солнца, Защита от солнца, Диспенсер для солнцезащитных кремов, SunSmart America, Technology
Медицинский центр Святого Варнавы объединилась с MoleSafe USA для создания Программы наблюдения за кожей для более точного выявления рака кожи.Программа использует передовые инструменты и методы для выявления вредных и изменяющихся образований на коже. Все тело …Фонд Меланомы Ричарда Дэвида Канна | 15 нояб.2017 г. | Текущие новости, инженерия и математика, в новостях, меланома, RDK, Фонд Ричарда Дэвида Канна Меланомы, SAM, наука, STEM, студенты против меланомы, защита от солнца, защита от солнца, диспенсер для солнцезащитного крема, SunSmart America, технологии
Билл Кауэр знает больше о меланома, чем он когда-либо ожидал.