Регулирование скорости вращения двигателей постоянного тока
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
Регулирование скорости вращения двигателей постоянного тока
Электропривод, построенный на основе двигателей постоянного тока используются в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности.
Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока.
Основные способы управления скоростью вращения двигателя постоянного тока:
1) изменение тока в цепи обмотки возбуждения при стабильном напряжении на обмотке якоря;
2) изменение напряжения на обмотке якоря при стабильном токе в цепи обмотки возбуждения;
3) изменение напряжения на обмотке якоря, а также изменение тока в цепи обмотки возбуждения.
Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом конструктивное исполнение двигателей постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также и недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода. Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием.
Если технологический процесс включает необходимость изменения направления вращения двигателя(реверс), эта возможность также может быть выполнена одним из способов — в цепи обмотки якоря или обмотки возбуждения. Такая возможность реализуется изменением полярности управляющего постоянного напряжения или тока.
Узнайте условия проведения наладки промышленной электроники, отправив запрос на [email protected]
Время выполнения запроса: 0,00314092636108 секунд.
Регулирование электродвигателей постоянного тока | КИП и АММИАЧНЫЕ ХОЛОДИЛЬНЫЕ УСТАНОВКИ
Как известно в холодильной технике, да и не только там, необходимо регулировать скорость вращения электродвигателей. Это необходимо для плавного регулирования параметров установки, а как следствие и производительности. Ниже мы рассмотрим способы регулирование электродвигателей постоянного тока.
Способы регулирования электродвигателей постоянного тока.
Как известно, работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. При этом на проводник с током, помещенный в магнитное поле, действует сила, определяемая следующим образом:
F = BIL,
где I — ток, протекающий по проводнику [A], В — индукция магнитного поля [Тл]; L — длина проводника [м].
При пересечении проводником магнитных силовых линий в нем наводится электродвижущая сила (ЭДС), которая направлена против тока в проводнике и поэтому называется обратной или противодействующей ЭДС. Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
[hana-code-insert name=’reclam google’ /]Электродвигатели постоянного тока применяют в электроприводах, где требуются большой диапазон регулирования скорости, большая точность поддержания скорости вращения, возможность регулирования скорости в большую сторону относительно номинальной.
С точки зрения регулирования электродвигателей нас будет интересовать формула для определения частоты вращения. Частота вращения электродвигателя постоянного тока определяется следующим образом:
n = (U – Iя Rя)/(kc Ф),
где U — напряжение питающей сети [В], Iя — ток якоря [A], Rя — сопротивление цепи якоря [Ом], kс — коэффициент, характеризующий магнитную систему, Ф — магнитный поток электродвигателя [Вб].
Данное выражение называется уравнением электромеханической характеристики двигателя постоянного тока независимого возбуждения. Из него следует, что существует три способа регулирования угловой скорости:
- за счет изменения величины сопротивления реостата в цепи якоря;
- за счет изменения потока возбуждения двигателя Ф;
- за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Остановимся подробнее на каждом из этих способов.
Вариант регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря приводит к изменению жесткости характеристик в широких пределах, а потому при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен. Скорость можно регулировать в сторону уменьшения от номинальной (об этом свидетельствуют электромеханические и механические характеристики). Высокую плавность регулирования обеспечить трудно. Также недостатком является и наличие значительных потерь мощности в процессе регулирования.
При втором способе регулирование осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока уменьшается. Однако на практике возможно изменение скорости только в сторону увеличения. Благодаря возможности плавного изменения сопротивления реостата появляется и возможность плавного регулирования скорости вращения электродвигателя. Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Однако данный вид регулирования практически не высвобождает мощности (энергопотребление постоянно), а потому используется в приводах только в качестве вспомогательного, причем, как правило, только в условиях холостого хода.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю.
При этом следует отметить, что все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной. Таким образом, работа двигателя является стабильной на всех угловых скоростях, и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Более того, угловую скорость можно уменьшать и увеличивать относительно номинальной. Также достаточно просто обеспечить и плавное регулирование частоты вращения электродвигателя: для этого достаточно плавно изменять напряжение постоянного тока.
Наконец, этот вариант регулирования является наиболее экономичным, поскольку регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря.
[hana-code-insert name=’POBOLYreklama’ /]Учитывая все факторы вышеизложенного анализа существующих способов регулирования частоты двигателей постоянного тока, можно утверждать, что третий способ регулирования является наилучшим.
Именно поэтому в климатической технике регулирование двигателей постоянного тока реализовано посредством изменения питающего напряжения.
Рассмотрим возможные варианты изменения (регулирования) напряжения постоянного тока.
Регулирование скорости вращения и устойчивость работы двигателей постоянного тока
Дата публикации: .
Категория: Машины постоянного тока.
Способы регулирования скорости вращения
Способы регулирования скорости вращения двигателей постоянного тока следуют из соотношений (7) и (9), представленных в статье «Общие сведения о двигателях постоянного тока». Возможны три способа регулирования скорости вращения.
1. Наиболее удобным, распространенным и экономичным является способ регулирования скорости путем изменения потока Фδ, то есть тока возбуждения iв.
С уменьшением Фδ, согласно выражению (7), представленному в статье «Общие сведения о двигателях постоянного тока», скорость возрастает. Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Фδ, то есть с наименьшей скоростью n. Поэтому практически можно только уменьшать Фδ.
Следовательно, рассматриваемый способ позволяет регулировать скорость вверх от номинальной. При таком регулировании коэффициент полезного действия (к. п. д.) двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока возбуждения. К тому же при уменьшении iв мощность возбуждения U × iв уменьшается.
Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями ее коммутации.
При высоких скоростях коммутация ухудшается вследствие увеличения вибрации щеточного аппарата, неустойчивости щеточного контакта и возрастания реактивной электродвижущей силы (э. д. с.), а также вследствие увеличения максимального напряжения между коллекторными пластинами в результате ослабления основного поля и усиления при этом искажающего влияния поперечной реакции якоря.
Для увеличения диапазона регулирования n посредством ослабления поля в машинах малой и средней мощности с волновой обмоткой якоря иногда применяют раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют iв = const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов iв и поток уменьшают. Искажение влияния поперечной реакции якоря под первой группой полюсов в этом случае будет проявляться значительно слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из э. д. с. p секций, расположенных под всеми полюсами, то в результате такого регулирования потока полюсов распределение напряжения между пластинами будет более равномерным.
2. Другой способ регулирования скорости заключается во включении последовательно в цепь якоря реостата или регулируемого сопротивления Rра.
Вместо выражения (7), представленного в статье «Общие сведения о двигателях постоянного тока», при этом имеем
 | (1) |
Этот способ дает возможность регулировать скорость вниз от номинальной и связан со значительными потерями в сопротивлении Rра и понижением к. п. д.
Действительно, при номинальном токе якоря Iа = Iан среднее значение числителя равенства (7), представленного в статье «Общие сведения о двигателях постоянного тока», в относительных единицах равно
U* – Rа* × Iан* = 1 – 0,05 = 0,95.
Если при Фδ = const необходимо уменьшить скорость вдвое, то нужно уменьшить этот числитель вдвое, то есть
U* – Rа* × Iан* – Rра* × Iан* = 1 – 0,05 – Rра* × Iан* = 0,475.
Так как U* = Iан* = 1, то при этом
Rра* = 0,95 – 0,475 = 0,475 ,
то есть в реостате будет теряться 47,5% приложенного напряжения и столько же мощности, подводимой к цепи якоря. По этой причине данный способ применяется в основном для двигателей небольшой мощности, а для более мощных двигателей используется редко и только кратковременно (пуско-наладочные режимы и так далее).
3. Регулирование скорости осуществляется также путем регулирования напряжения цепи якоря. Так как работа двигателя при U > Uн недопустима, то данный способ, согласно выражениям (7) и (9), представленным в статье «Общие сведения о двигателях постоянного тока»), дает возможность регулировать скорость также вниз от номинальной. К. п. д. двигателя при этом остается высоким, так как никаких добавочных источников потерь в схему двигателя не вносится.
Однако в этом случае необходимо отдельный источник тока с регулируемым напряжением, что удорожает установку.
Отметим, что регулирование скорости путем изменения Iа невозможно, хотя такая возможность на первый взгляд вытекает из равенства (7), представленного в статье «Общие сведения о двигателях постоянного тока». Дело в том, что, согласно равенству (3), представленному в статье «Общие сведения о двигателях постоянного тока», двигатель при каждой скорости вращения должен развивать определенный момент M, равный моменту сопротивления механизма Mст при данном значении n. Но при этом в соответствии с выражением (8), представленным в статье «Общие сведения о двигателях постоянного тока», при заданном значении Фδ величина Iа в двигателе будет при каждом значении M тоже вполне определенной.
Условия устойчивости работы двигателя
При работе двигателя всегда возникают определенные возмущения режима работы (кратковременные колебания напряжения сети, случайные кратковременные изменения момента нагрузки на валу и так далее). Такие возмущения чаще всего бывают небольшими и кратковременными, однако при этом происходят, хотя также небольшие и кратковременные, нарушения равенства моментов установившегося режима работы [смотрите выражение (3) в статье «Общие сведения о двигателях постоянного тока»], вследствие чего возникает момент Mдин и изменяется скорость вращения.
Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы при малых возмущениях, когда действие этих возмущений прекратится. Иными словами, работа двигателя называется устойчивой, если бесконечно малые в пределе возмущения его работы вызывают лишь столь же малые изменения величин, характеризующих режим его работы, например скорости вращения, тока якоря и так далее. Двигатель неустойчив в работе, если подобные малые возмущения приводят к большим изменениям режима работы. При неустойчивой работе небольшие кратковременные возмущения вызывают либо непрерывное изменение режима (n, Iа и так далее) в каком-либо одном направлении, либо приводят к колебательному режиму с возрастанием амплитуд колебаний n, Iа и так далее. Естественно, что в условиях эксплуатации необходимо обеспечить устойчивый режим работы двигателя. При неустойчивости двигателя нормальная его работа невозможна, и обычно происходит авария.
Неустойчивая работа может быть также и у генераторов. В статье «Параллельная работа генераторов постоянного тока» была рассмотрена неустойчивость параллельной работы генераторов смешанного возбуждения при отсутствии уравнительного провода. Режим самовозбуждения генераторов постоянного тока (смотрите статью «Генераторы параллельного возбуждения») также, в сущности, представляет собой неустойчивый режим работы, так как iв и U непрерывно изменяются. Работа генератора параллельного возбуждения при Rн = Rв.кр также неустойчива, так как если несколько изменить величину Rв, то напряжение U значительно изменится, то есть возрастет до некоторого конечного значения или упадет почти до нуля.
Устойчивость работы двигателя зависит от вида его механической характеристики M = f(n) и от вида зависимости момента сопротивления на валу от скорости вращения Mст = f(n). Вид последней зависимости определяется свойствами рабочей машины, приводимой в движение двигателем. Например, у металлорежущих станков, если установка резца не изменяется, Mст ≈ const, то есть Mст не зависит от скорости вращения, а у вентиляторов и насосов Mст ∼ nв квадрате.
 |
| Рисунок 1. Устойчивый (а) и неустойчивый (б) режим работы двигателя |
На рисунке 1, а и б изображены два характерных случая работы двигателя. Установившемуся режиму работы (M = Mст) со скоростью вращения n0 соответствует точка пересечения указанных двух характеристик.
Если зависимости M = f(n), и Mст = f(n) имеют вид, изображенный на рисунке 1, а, то при случайном увеличении n в результате возмущения на Δn тормозной момент Mст станет больше движущего M (Mст > M) и поэтому двигатель будет затормаживаться, что заставит ротор вернуться к исходной скорости n0. Точно так же, если в результате возмущения скорость двигателя уменьшится на Δn, то будет Mст < M, поэтому ротор станет ускоряться и снова будет n = n0. Таким образом, в рассматриваемом случае работа устойчива. Как следует из рисунка 1, а, при этом
 | (2) |
что и является признаком, или критерием, устойчивости работы двигателя.
При зависимостях M = f(n) и Mст = f(n) вида рисунка 1, б работа неустойчива. Действительно, при увеличении n от n = n0 до n = n0 + Δn будет M > Mст, возникнет избыток движущего момента, скорость n начнет нарастать, причем избыточный момент M – Mст увеличится еще больше, n еще возрастет и так далее. Если в результате возмущения n = n0 – Δn, то M < Mст и n будет непрерывно уменьшаться. Поэтому работа в точке M = Mст и n = n0 невозможна. Как следует из рисунка 1, б, в этом случае
 | (3) |
что является признаком неустойчивости работы двигателя.
Из изложенного следует, что двигатель с данной механической характеристикой M = f(n) может работать устойчиво или неустойчиво в зависимости от характеристики Mст = f(n) рабочей машины. Возникновение неустойчивости наиболее вероятно при такой механической характеристики двигателя M = f(n) или n = f(M), когда M и n увеличиваются или уменьшаются одновременно (рисунок 1, б). В частности, в этом случае работа неустойчива при Mст = f(n) = const (например, металлорежущие станки). Поэтому двигателей с такими механическими характеристиками не строят.
Изложенное здесь в равной мере относится к устойчивости двигателей как постоянного, так и переменного тока, а также любых видов двигателей.
Изменение режима работы
Двигатели постоянного тока, как, впрочем, и двигатели переменного тока, обладают при соблюдении условий устойчивости замечательной способностью автоматически, без внешнего регулирующего воздействия, приспосабливаться к изменившимся условиям работы. В этом смысле можно сказать, что электрические двигатели обладают свойством саморегулирования. Проиллюстрируем сказанное на примере двигателя параллельного возбуждения.
Допустим, что такой двигатель работает при U = const, iв = const и, следовательно, Фδ ≈ const и нагрузочный момент Mст, развиваемый рабочей машиной, увеличивается. Тогда M < Mст, возникает Mдин < 0 [смотрите выражение (2) в статье «Общие сведения о двигателях постоянного тока»] и n начинает уменьшаться. Но при этом будет уменьшаться также Eа; ток Iа [смотрите выражение (5) в статье «Общие сведения о двигателях постоянного тока»] и момент M [смотрите выражение (8) в статье «Общие сведения о двигателях постоянного тока»] начнут увеличиваться, причем это будет происходить до тех пор, пока снова не наступит равновесие моментов M = Mст. Аналогичным образом изменяется также режим, если Mст уменьшится, причем в этом случае n и Eа начнут увеличиваться, а Iа и M – уменьшаться до тех пор, пока снова будет M = Mст и Mдин = 0.
| Рисунок 2. Переход двигателя параллельного возбуждения к новому режиму работы при уменьшении потока |
Допустим теперь, что с помощью реостата Rр.в (смотрите рисунок 1, в статье «Пуск двигателей постоянного тока») уменьшен ток iв. При этом Фδ будет уменьшаться, однако вследствие механической инерции ротора скорость n в первый момент не изменится. Тогда, согласно выражению (6), представленному в статье «Общие сведения о двигателях постоянного тока», Eа уменьшится, а вследствие этого Iа и M возрастут [смотрите выражения 5 и 8 в статье «Общие сведения о двигателях постоянного тока»]. При этом будет M > Mст, в соответствие с равенством (2), представленным в статье «Общие сведения о двигателях постоянного тока», Mдин > 0, и скорость n начнет увеличиваться. Это вызовет, согласно тем же соотношениям, увеличение Eа и уменьшение Iа и M до тех пор, пока снова не наступит равновесие моментов M = Mст и Mдин = 0 (рисунок 2). При увеличении iв явления развиваются в обратном направлении. Необходимо отметить, что резких изменений iв при регулировании допускать нельзя, так как U и Eа [смотрите выражение 5 в статье «Общие сведения о двигателях постоянного тока»] являются близкими по значению и небольшое изменение Фδ и Eа ведет к большим изменениям Iа и M.
Аналогичным образом происходит переход к новому режиму при изменении других внешних условий (например, введение сопротивления в цепь якоря и так далее), а также в двигателях с другими способами возбуждения.
Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму работы всецело определяется уравнениями равновесия моментов и напряжения цепи якоря, выражения (2) и (4), представленные в статье «Общие сведения о двигателях постоянного тока»).
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
Регулирование скорости вращения ДПТ
Из выражения механической характеристики (71)  следует, что возможны три способа регулирования скорости вращения:
следует, что возможны три способа регулирования скорости вращения:
1) изменением магнитного потока главных полюсов;
2) изменением сопротивления цепи якоря;
3) регулированием напряжения питающей сети.
 Рассмотрим регулирование скорости для двигателя параллельного возбуждения (рис.25).
Рассмотрим регулирование скорости для двигателя параллельного возбуждения (рис.25).
Рис. 25. Схема включения ДПТ параллельного возбуждения
Механическая характеристика двигателя, снятая при неизменных номинальных значениях напряжения, тока и при номинальных значениях всех сопротивлений, называется естественной механической характеристикой. В противном случае – искусственной.
Для двигателя параллельного возбуждения механическая характеристика имеет вид линейной зависимости:
 , (77)
, (77)
где  и
и  .
.
Рассмотрим все способы регулирования скорости вращения ДПТ.
1) Изменением магнитного потока.
Для изменения магнитного потока требуется изменять ток возбуждения. Для изменения тока возбуждения последовательно с обмоткой возбуждения (ОВ) включается регулировочный реостат, который может увеличивать сопротивление ОВ по отношению к номинальному значению, а значит только уменьшать ток и магнитный поток Ф. Тогда получается:

В выражении механической характеристики коэффициенты n0 и b будут при этом возрастать. На рис. 26 возросшим значениям магнитного потока соответствуют искусственные характеристики 1 и 2. Из характеристик следует, что изменением магнитного потока можно только увеличивать скорость вращения двигателя по сравнению с номинальной  .
.
2) Изменением сопротивления цепи якоря.
Изменение сопротивления цепи якоря  может осуществляться только в сторону увеличения сопротивления. Это можно сделать, включив последовательно с якорем регулировочный реостат.
может осуществляться только в сторону увеличения сопротивления. Это можно сделать, включив последовательно с якорем регулировочный реостат.
Тогда общее сопротивление цепи якоря может только возрасти
 (из- за последовательного соединения реостата), а, значит, возрастает коэффициент b при постоянном значении n0:
(из- за последовательного соединения реостата), а, значит, возрастает коэффициент b при постоянном значении n0:
 .
.
Характеристики, соответствующие этому способу регулирования показаны на рис. 26. (линии 3, 4, 5).
Из характеристик следует, что изменением сопротивления якоря можно только уменьшать скорость вращения по сравнению с .
3) Изменением напряжения питающей сети.
Регулирование напряжения сети осуществляется с помощью регуляторов (например, тиристорных), и поэтому данный способ регулирования применяется в тех случаях, когда требуется специальное управление каким-либо технологическим процессом. В этом случае:
 изменяется, а
изменяется, а  .
.
На рис. 26 такому способу регулирования соответствует характеристика 7.
Рис. 26. Регулировочные характеристики ДПТ
Вопросы для самопроверки
1. Для чего предназначены машины постоянного тока (МПТ)?
2. Для чего предназначен коллектор машины?
3. Какой обмоткой создается магнитное поле МПТ?
4. Какой физический закон лежит в основе принципа работы генератора постоянного тока?
5. Как создается магнитный момент в машине?
6. Запишите выражение ЭДС МПТ и поясните, какие величины в него входят.
7. Запишите выражение электромагнитного вращающего момента МПТ и поясните, какие величины в него входят.
8. Виды потерь в машине постоянного тока.
9. Определение коэффициента полезного действия машины. Зависимость КПД от нагрузки.
10. Способы возбуждения в МПТ. Схемы и определения.
11. Что такое реакция якоря в МПТ, каковы ее последствия и способы снижения ее влияния?
12. Запишите основные уравнения, определяющие работу двигателя постоянного тока.
13. Определение, аналитическое выражение и вид механической характеристики двигателей различного типа возбуждения.
14. Условия пуска двигателя постоянного тока.
15. Проблемы пуска двигателя постоянного тока (ДПТ).
16. Как ограничивают пусковой ток в ДПТ?
17. Перечислите способы регулирования скорости вращения ДПТ.
18. Как регулируется скорость вращения двигателя за счет изменения магнитного потока главных полюсов?
19. Как регулируется скорость вращения двигателя постоянного тока при изменении сопротивления цепи якоря?
Задача 2.Двигатель постоянного тока параллельного возбуждения имеет следующие данные: номинальная мощность  , напряжение питания
, напряжение питания  номинальная скорость вращения n
номинальная скорость вращения n  , сопротивление цепи якоря
, сопротивление цепи якоря  ,сопротивление цепи возбуждения
,сопротивление цепи возбуждения ,номинальный коэффициент полезного действия
,номинальный коэффициент полезного действия  .
.
Определить:
1.Номинальный ток, потребляемый двигателем, номинальный ток якоря и ток возбуждения.
2. Сопротивление пускового реостата  , при котором начальный пусковой ток в цепи якоря составлял 2,5
, при котором начальный пусковой ток в цепи якоря составлял 2,5  .
.
3. Начальный пусковой момент двигателя при заданной кратности пускового тока.
4. Номинальный вращающий момент двигателя.
5. Построить в одной системе координат естественную механическую характеристику и искусственную (при введении пускового реостата ) механическую характеристику. Определить диапазон изменения частоты вращения при номинальной нагрузке.
Таблица 2 Тип двигателя и его данные
Решение
1. Номинальный ток двигателя, номинальный ток якоря и обмотки возбуждения.
Номинальный ток двигателя определяется из соотношений:  ;
; 
Отсюда номинальный ток двигателя: 
Номинальный ток возбуждения:
В двигателе параллельного возбуждения токи связны уравнением (рис. 25):  , где
, где  — номинальные токи обмотки якоря и возбуждения соответственно.
— номинальные токи обмотки якоря и возбуждения соответственно.
Тогда: 
2. Сопротивление пускового реостата  , при котором начальный пусковой ток цепи якоря составляет
, при котором начальный пусковой ток цепи якоря составляет  .
.
Пусковой ток двигателя при наличии реостата в цепи якоря равен:
 откуда
откуда 
По условию  , следовательно:
, следовательно:

3. Начальный пусковой момент двигателя при заданной кратности пускового тока.
Заданная кратность пускового тока .
В двигателе постоянного тока параллельного возбуждения момент
 Так как
Так как  при изменении сопротивления цепи якоря, а
при изменении сопротивления цепи якоря, а  , то момент пропорционален току якоря.
, то момент пропорционален току якоря.
Тогда можно записать 
Отсюда пусковой момент:
 – номинальный момент двигателя.
– номинальный момент двигателя.
Номинальный момент двигателя определим из следующих соображений. Так как из (69)  , и из (52) и (53)
, и из (52) и (53)  и
и  , можно записать
, можно записать  откуда
откуда 
Тогда для номинального момента

Пусковой момент:

4. Естественная механическая характеристика двигателя.
Механическая характеристика линейна, поэтому для ее построения достаточно определить координаты 2-х точек.
Координаты одной точки уже определены: (  ). То есть (175,1Н·м; 600 об/мин).
). То есть (175,1Н·м; 600 об/мин).
Вторая точка соответствует холостому ходу двигателя, т.е. при М=0.
Из уравнения механической характеристики следует, что скорость холостого хода равна 
В номинальном режиме:
 и
и 
Тогда 
Рассмотрим отношение:  , откуда
, откуда
Механическая характеристика строится по точкам:
(175,1Н·м; 600 об/мин) и (0; 634,6 об/мин) ( рис.27).
5. Искусственная механическая характеристика при введении пускового реостата  в одной системе координат с естественной (п.4).
в одной системе координат с естественной (п.4).
Искусственная механическая характеристика также линейна. Кроме того, скорость холостого хода  при номинальном напряжении сети
при номинальном напряжении сети  не зависит от значения сопротивления цепи якоря. То есть одна точка, соответствующая холостому ходу двигателя, остается от предыдущего расчета.
не зависит от значения сопротивления цепи якоря. То есть одна точка, соответствующая холостому ходу двигателя, остается от предыдущего расчета.
Для определения второй точки искусственной характеристики воспользуемся выражениями
 и
и 
где  – скорость двигателя при введении пускового реостата.
– скорость двигателя при введении пускового реостата.
Отсюда: 

6. Диапазон изменения скорости при номинальной нагрузке.
 Диапазон определяется из графика (рис.27): от (380,8 до 600) об/мин.
Диапазон определяется из графика (рис.27): от (380,8 до 600) об/мин.
Рис. 27. Механические характеристики двигателя
АСИНХРОННЫЕ МАШИНЫ (АМ)
Читайте также:
Рекомендуемые страницы:
Поиск по сайту
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
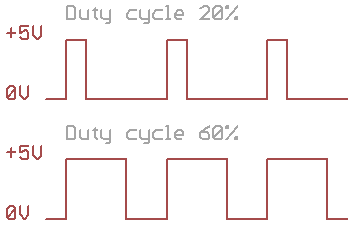
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
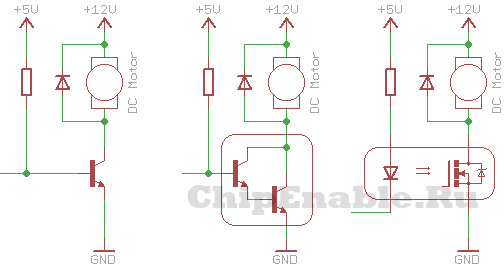
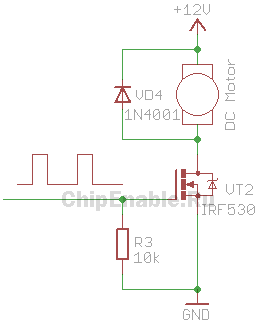
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
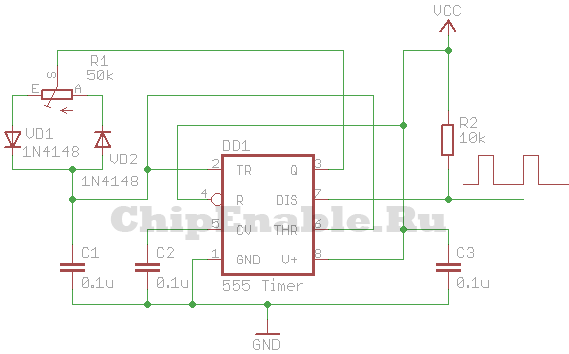
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
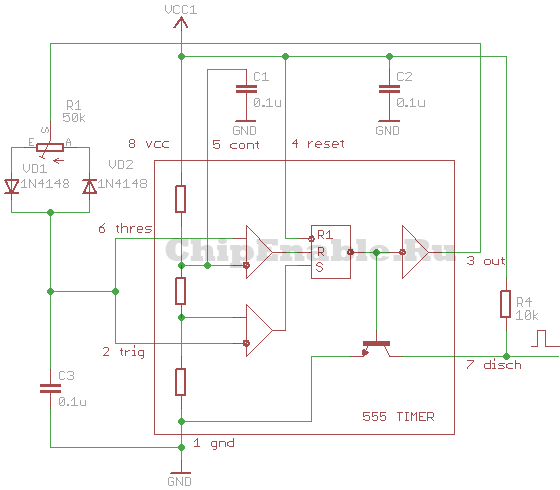
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
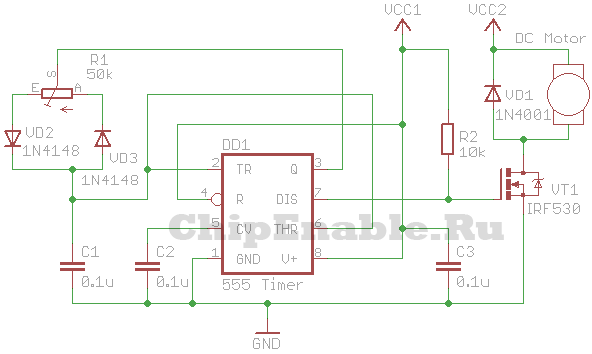
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.