Регулятор частоты вращения для двигателя 190F / 94683043
-
БЕНЗОПИЛЫ, ЭЛЕКТРОПИЛЫ + РАСХОДКА
-
БЕТОНОМЕШАЛКИ
-
МОТОБЛОКИ + КУЛЬТИВАТОРЫ
-
МОТОБУКСИРОВЩИКИ (МОТОСОБАКИ) И КОМПЛЕКТУЮЩИЕ
-
МОТОБУРЫ, РУЧНЫЕ БУРЫ, ШНЕКИ
-
СНЕГОУБОРОЧНИКИ
-
СТАБИЛИЗАТОРЫ
-
ТЕПЛОВОЕ ОБОРУДОВАНИЕ
-
ТРИММЕРЫ + КУСТОРЕЗЫ
-
ЭЛЕКТРОГЕНЕРАТОРЫ
-
АВТОМОЙКИ
- АКСЕССУАРЫ ДЛЯ АВТОМОБИЛЯ
-
ВСЁ ДЛЯ ВАШЕГО ОГОРОДА
-
ВЫСОТОРЕЗЫ
-
ГАЗОНОКОСИЛКИ И СКАРИФИКАТОРЫ
-
ДВИГАТЕЛИ БЕНЗИНОВЫЕ И ЭЛЕКТРИЧЕСКИЕ
-
ЗАПЧАСТИ
-
-
КРЕПЕЖНЫЕ ПРИСПОСОБЛЕНИЯ
-
ЛЕСТНИЦЫ, СТРЕМЯНКИ
-
ЛОДОЧНЫЕ МОТОРЫ
-
МОТОПОМПЫ
-
НАСОСЫ
-
ОБОРУДОВАНИЕ ДЛЯ ФЕРМЕРОВ
-
ОПРЫСКИВАТЕЛИ БЕНЗИНОВЫЕ и РУЧНЫЕ
-
ПОДМЕТАЛЬНЫЕ МАШИНЫ И АКСЕССУАРЫ
-
ПОДЪЁМНЫЕ МЕХАНИЗМЫ, РАСХОДКА
-
ПРОМСЫРЬЕ
-
ПУСКО-ЗАРЯДНЫЕ УСТРОЙСТВА
-
РАСХОДНЫЕ МАТЕРИАЛЫ
-
САДОВЫЕ ИЗМЕЛЬЧИТЕЛИ, ДРОБИЛКИ
-
САДОВЫЕ НОЖНИЦЫ
-
САДОВЫЕ ПЫЛЕСОСЫ И ВОЗДУХОДУВЫ
-
СВАРОЧНОЕ ОБОРУДОВАНИЕ
- СЛЕСАРНО-СТРОИТЕЛЬНЫЙ ИНСТРУМЕНТ
-
СПЕЦОДЕЖДА
-
СТАНКИ
-
СТРОИТЕЛЬНАЯ ТЕХНИКА
-
ТУРИЗМ, СПОРТ, ОТДЫХ, СУВЕНИРЫ
-
ШТУКАТУРНО-МАЛЯРНЫЙ ИНСТРУМЕНТ
-
ЭЛЕКТРОИНСТРУМЕНТ
-
ЭЛЕКТРООБОРУДОВАНИЕ
-
Котлы и отопительное оборудование
-
ХОЗТОВАРЫ
-
ТРАКТОРА И РАЙДЕРЫ
- Описание
- Отзывы (0)
Описание
Напишите свой отзыв о «Регулятор частоты вращения для двигателя 190F / 94683043»
Имя / Псевдоним
Плюсы
Минусы
Комментарий
Оценка товара
Нажимая на кнопку я соглашаюсь с политикой обработки моих персональных данных
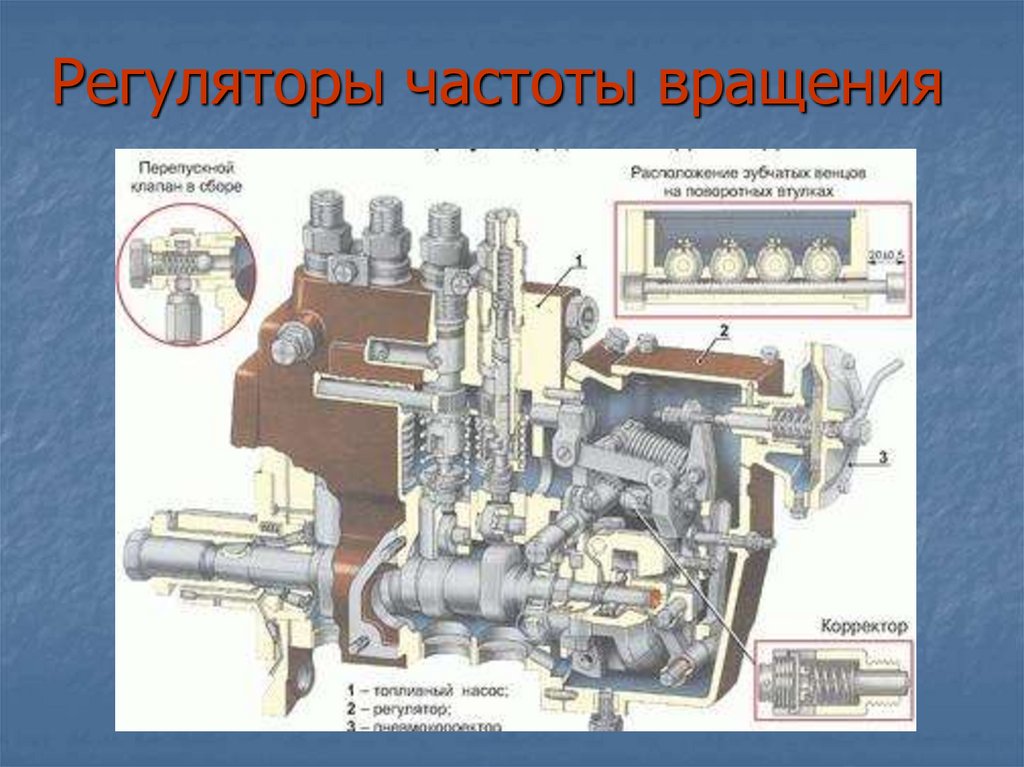
Регулятор частоты вращения коленчатого вала дизельного двигателя
В отличие от бензинового двигателя дизельные двигатели не имеет во впускном трубопроводе дроссельной заслонки, позволяющей четко регулировать частоту вращения коленчатого вала за счет изменения подачи воздуха с одновременным изменением подачи топлива. У дизельного двигателя не существует положения управляющей рейки, которое бы позволило двигателю поддерживать определенную частоту вращения коленчатого вала двигателя без помощи регулятора. Например, при запуске холодного двигателя и его работе на холостом ходу, потери на трение кривошипно-шатунного, газораспределительного и других механизмов и приводимых от двигателя агрегатов начинают снижаться, а количество подаваемого топлива будет постоянным. При отсутствии регулятора частота вращения будет увеличиваться и может достичь критической точки, при которой может произойти разрушение двигателя.
У дизельного двигателя не существует положения управляющей рейки, которое бы позволило двигателю поддерживать определенную частоту вращения коленчатого вала двигателя без помощи регулятора. Например, при запуске холодного двигателя и его работе на холостом ходу, потери на трение кривошипно-шатунного, газораспределительного и других механизмов и приводимых от двигателя агрегатов начинают снижаться, а количество подаваемого топлива будет постоянным. При отсутствии регулятора частота вращения будет увеличиваться и может достичь критической точки, при которой может произойти разрушение двигателя.
Регуляторы частоты вращения коленчатого вала дизельного двигателя устанавливаются на насосе высокого давления и приводятся в действие от кулачкового вала. Его работа основана, как и в автоматической муфте опережения впрыска, на использовании центробежных сил. Например, при заданном положении педали управления подачи топлива и возникновении дополнительного сопротивления движению (на подъеме) частота вращения коленчатого вала двигателя будет уменьшаться, а скорость автомобиля падать.
Аналогичным образом регулятор изменяет подачу топлива при уменьшении нагрузки на двигатель, только в этом случае управляющее воздействие регулятора сводится к уменьшению количества впрыскиваемого топлива. В результате при снижении нагрузки на двигатель происходит уменьшение скорости движения и доведение ее до заданного уровня. Таким образом, регулятор автоматически изменяет подачу топлива при изменении нагрузки на двигатель и обеспечивает установку любого выбранного скоростного режима при отклонениях от него в пределах – 10…20%.
Различают двухрежимный и всережимные регулятора частоты вращения коленчатого вала.
Двухрежимный регулятор (типа RQ) поддерживающий определенную частоту вращения коленчатого вала на режимах минимальной и максимальной частоты вращения коленчатого вала. Всережимный регулятор (типа RSV) поддерживает необходимую частоту вращения на всех режимах работы двигателя.
Всережимные регуляторы устанавливаемые на небольших высокооборотистых двигателях позволяют поддерживать частоту вращения коленчатого вала в пределах 6…10%.
В топливных насосах применяют регуляторы с различными принципами работы:
- механические
- пневматические
- гидравлические
- комбинированные
Для автомобильных двигателей наиболее широко применяют механические центробежные регуляторы и реже пневматические регуляторы.
Центробежный регулятор представляет собой систему, состоящую из вращающихся грузов, пружин и рычагов, связанных с рейкой топливного насоса высокого давления, управляющей цикловой подачей топлива.
Двурежимный регулятор
В двухрежимных регуляторах механизм регулятора связан с рейкой насоса высокого давления при помощи дифференциального рычага, соединенного также и с тягой педали акселератора, которой управляет водитель. Основными элементами двухрежимного центробежного регулятора являются большие 4 и малые 3 грузы.
Рис. Схема работы двухрежимного центробежного регулятора
Грузы свободно посажены на пальцы крестовины 1 и упираются лапками в скользящую муфту 5, также свободно установленную на вращающемся валу 6 регулятора, связанном зубчатой передачей с валом топливного насоса. С противоположной стороны в скользящую муфту под действием слабой пружины 12, помещенной в стакане 13 и втулке 11, упирается основной (вильчатый) рычаг 7 регулятора. Этот рычаг соединен при помощи двуплечего рычага 8 с рейкой 9 топливного насоса высокого давления и тягой 14 педали акселератора. Сильная пружина 10, установленная на втулке 11, упирается в неподвижную стенку корпуса регулятора. Грузы со слабой пружиной и сильной пружинами образуют две последовательно действующие системы регулирования, в которых используется общий рычажный механизм.
Грузы со слабой пружиной и сильной пружинами образуют две последовательно действующие системы регулирования, в которых используется общий рычажный механизм.
Массы грузов и затяжку слабой пружины подбирают так, чтобы действующие на муфту составляющие центробежной силы грузов и силы пружины оказались равными, т.е. чтобы система была в равновесии при минимальной частоте вращения коленчатого вала. Педаль акселератора во время работы двигателя на холостом ходу с минимальной частотой вращения коленчатого вала полностью отпущена и двуплечий рычаг находится в положении I. При самопроизвольном уменьшении частоты вращения коленчатого вала двигателя центробежная сила грузов уменьшается и пружина 12, отклоняя вильчатый рычаг, перемещает рейку топливного насоса в сторону увеличения подачи топлива. В случае самопроизвольного повышения частоты вращения коленчатого вала двигателя центробежная сила грузов увеличивается и муфта 5, отклоняя вильчатый рычаг и сжимая при этом пружину 12, перемещает рейку насоса в сторону уменьшения подачи топлива. Таким образом, одна система двухрежимного регулятора обеспечивает устойчивую работу дизеля при минимальной частоте вращения коленчатого вала на холостом ходу.
Таким образом, одна система двухрежимного регулятора обеспечивает устойчивую работу дизеля при минимальной частоте вращения коленчатого вала на холостом ходу.
Массу грузов и затяжку сильной пружины подбирают так, чтобы равновесие системы обеспечивалось при максимальной частоте вращения коленчатого вала, допустимом для данного двигателя. Педаль акселератора при работе двигателя с максимальной частотой вращения коленчатого вала полностью нажата, и двуплечий рычаг находится в положении II. При этом большие грузы регулятора раздвигаются до упоров 2 и не изменяют своего положения, сжимая слабую пружину вильчатым рычагом настолько, что стакан 13 вдвигается до упора в торец втулки 11.
С дальнейшим увеличением частоты вращения коленчатого вала, которое может происходить при уменьшении нагрузки дизеля, центробежная сила грузов увеличивается и муфта 5, отклоняя вильчатый рычаг и сжимая при этом пружину 10, перемещает рейку насоса высокого давления в сторону уменьшения подачи топлива. Таким образом, вторая система двухрежимного регулятора ограничивает максимальную частоту вращения, не допуская его разноса, даже при его полной разгрузке.
Таким образом, вторая система двухрежимного регулятора ограничивает максимальную частоту вращения, не допуская его разноса, даже при его полной разгрузке.
На рисунке приведены скоростные характеристики дизеля с двухрежимным регулятором.
Рис. Характеристики дизеля с двухрежимным регулятором:
Мкр – крутящий момент; Nе – мощность; n – частота вращения коленчатого вала
Кривые 1, 2 и 3 соответствуют различным положениям педали акселератора. Участок n1…n2 регулируется системой минимальной, а участок n3…n4 системой максимальной частоты вращения регулятора. В диапазоне между этими участками режим работы двигателя управляется только педалью акселератора без воздействия регулятора.
Центробежный регулятор всережимного типа
Центробежный регулятор всережимного типа также представляет собой систему, состоящую из вращающихся грузов, пружины и основного рычага, связанного с рейкой топливного насоса высокого давления, управляющей цикловой подачей топлива. Особенность регулятора этого типа заключается в отсутствии непосредственной связи рейки топливного насоса с педалью акселератора. На рисунке дана схема всережимного центробежного регулятора.
Особенность регулятора этого типа заключается в отсутствии непосредственной связи рейки топливного насоса с педалью акселератора. На рисунке дана схема всережимного центробежного регулятора.
Рис. Схема работы всережимного центробежного регулятора
На вращающемся валу 9 регулятора, который при помощи шестерен связан с кулачковым валом топливного насоса, закреплена крестовина 6. В проушинах крестовины на пальцах 7 установлены качающиеся грузы 8 с лапками, которые упираются в подвижную муфту 10, надетую на вал регулятора. С другой стороны в муфту упирается основной вильчатый рычаг 2, установленный на оси 11 и соединенный с пружиной 3 и рейкой 1 топливного насоса высокого давления. Другой конец пружины соединен с рычагом 4, жестко связанным общей осью с рычагом 5 управления регулятором, который размещен с наружной стороны корпуса регулятора.
Система находится в равновесии, когда составляющие центробежной силы вращающихся грузов и силы пружины, действующие на подвижную муфту, равны между собой. При повышении частоты вращения коленчатого вала двигателя и связанного с ним вала регулятора, происходящем при уменьшении нагрузки, центробежная сила грузов увеличивается, заставляя их раздвинуться и переместить подвижную муфту, вильчатый рычаг и связанную c ним рейку топливного насоса в сторону уменьшения подачи топлива. В случае понижения частоты вращения, происходящем при увеличении нагрузки дизеля, центробежная сила грузов уменьшается и пружина, воздействуя на вильчатый рычаг, перемещает рейку топливного насоса в сторону увеличения подачи топлива. Частоту вращения изменяют натяжением пружины, связанной с рычагом управления регулятором, причем для повышения частоты вращения коленчатого вала необходимо увеличить натяжение пружины.
При повышении частоты вращения коленчатого вала двигателя и связанного с ним вала регулятора, происходящем при уменьшении нагрузки, центробежная сила грузов увеличивается, заставляя их раздвинуться и переместить подвижную муфту, вильчатый рычаг и связанную c ним рейку топливного насоса в сторону уменьшения подачи топлива. В случае понижения частоты вращения, происходящем при увеличении нагрузки дизеля, центробежная сила грузов уменьшается и пружина, воздействуя на вильчатый рычаг, перемещает рейку топливного насоса в сторону увеличения подачи топлива. Частоту вращения изменяют натяжением пружины, связанной с рычагом управления регулятором, причем для повышения частоты вращения коленчатого вала необходимо увеличить натяжение пружины.
На рисунке приведены скоростные характеристики дизеля с всережимным регулятором частоты вращения.
Рис. Характеристики дизеля с всережимным регулятором:
Мкр – крутящий момент; Nе – мощность; n – частота вращения коленчатого вала
Каждому положению рычага управления регулятором соответствует определенная ветвь кривой – А1В1, А2В2 и т. д., характеризующая зависимость частоты вращения коленчатого вала от мощности и крутящего момента (нагрузки) двигателя в диапазоне от полной мощности, развиваемой при максимальной частоте вращения коленчатого вала, до холостого хода при минимальной частоте вращения коленчатого вала. Из рассмотрения характеристик видно, что при постоянном положении рычага управления регулятором частота вращения мало зависит от изменения мощности в широких пределах. Однако степень неравномерности увеличивается при уменьшении регулируемой частоте вращения и становится значительной (40…70%) при минимальной частоте вращения на холостом ходу. Это обусловливается постоянной жесткостью пружины и значительным уменьшением центробежной силы грузов при уменьшении частоты вращения вала регулятора.
д., характеризующая зависимость частоты вращения коленчатого вала от мощности и крутящего момента (нагрузки) двигателя в диапазоне от полной мощности, развиваемой при максимальной частоте вращения коленчатого вала, до холостого хода при минимальной частоте вращения коленчатого вала. Из рассмотрения характеристик видно, что при постоянном положении рычага управления регулятором частота вращения мало зависит от изменения мощности в широких пределах. Однако степень неравномерности увеличивается при уменьшении регулируемой частоте вращения и становится значительной (40…70%) при минимальной частоте вращения на холостом ходу. Это обусловливается постоянной жесткостью пружины и значительным уменьшением центробежной силы грузов при уменьшении частоты вращения вала регулятора.
Регуляторы принцип работы которых описан выше применяются на большинстве рядных ТНВД. На рисунке показан двухрежимный регулятор рядного ТНВД легкового автомобиля Мерседес.
Рис. Двухрежимный регулятор:
1 – вакуумная камера остановки двигателя; 2 – контргайка; 3 – вакуумная камера увеличения частоты вращения коленчатого вала двигателя; 4 – ограничительный винт количества топлива на минимальной частоте вращения коленчатого вала двигателя; 5 – рычаг изменения подачи топлива; 6 – винт пружины регулятора; 7 – промежуточный рычаг; 8 – винт регулировки максимальной частоты вращения; 9 – центробежный регулятор; 10 – рейка; 11 – упорный рычаг; 12 – рычаг рейки
На режиме пуска вследствие максимального сближения грузов центробежного регулятора 9 рейка регулирования подачи топлива 10 через систему рычагов занимает положение полной подачи топлива.
При работе двигателя в режиме холостого хода, вследствие воздействия на рейку слабой пружины со стороны вертикального рычага и положения центробежных грузов, поддерживается стабильная частота вращения коленчатого вала.
В режиме частичной или полной нагрузки воздействие на рейку насоса осуществляется только от педали акселератора, которая связана системой тяг с рычагом изменения подачи топлива на регуляторе и регулятор частоты вращения в работе не участвует.
При увеличении частоты вращения коленчатого вала во время торможения двигателем рейка насоса устанавливается в положение прекращения подачи. Если частота вращения коленчатого вала достигнет 5150 об/мин рейка устанавливается в положение прекращения подачи топлива, чем достигается ограничение максимальной частоты вращения, для предотвращения максимально допустимых нагрузок на двигатель.
Регуляторы скорости для двигателей постоянного тока и бесколлекторных двигателей
Регуляторы скорости
Регуляторы скорости FAULHABER специально разработаны для максимально эффективного использования двигателей FAULHABER DC и BL. Они компактны, просты в эксплуатации и обеспечивают точное и эффективное регулирование скорости. Индивидуальное управление скоростью можно легко настроить с помощью компьютера и бесплатного программного обеспечения «FAULHABER Motion Manager».
Они компактны, просты в эксплуатации и обеспечивают точное и эффективное регулирование скорости. Индивидуальное управление скоростью можно легко настроить с помощью компьютера и бесплатного программного обеспечения «FAULHABER Motion Manager».
Speed Control от FAULHABER — это высокодинамичные регуляторы скорости для управления:
- Двигатели постоянного тока с инкрементным энкодером и без него
- Бесколлекторные двигатели с аналоговыми или цифровыми датчиками Холла
- Бесколлекторные двигатели с абсолютным энкодером AES
- Бесколлекторные двигатели с цифровыми датчиками Холла и инкрементными энкодерами
В зависимости от размер и состояние поставки, Различные комбинации двигателей и датчиков могут работать на регуляторе скорости. Различные размеры, а также гибкие возможности подключения открывают широкий спектр применений в таких областях, как лабораторная техника и производство оборудования, технологии автоматизации, манипуляторы и инструменты, станки или насосы.
Основные характеристики
Напряжение питания:
4 … 50 В пост. тока
Макс. непрерывный выходной ток:
8 А
Компактный дизайн
Возможность гибкой реконфигурации
Минимальные требования к проводке
Настройка параметров с помощью программного обеспечения FAULHABER Motion Manager и адаптера USB-интерфейса
Широкий ассортимент аксессуаров
Регуляторы скорости от FAULHABER
Регуляторы скоростиот FAULHABER можно адаптировать к данному приложению с помощью программного обеспечения FAULHABER Motion Manager. С помощью регуляторов скорости можно настроить режим работы, параметры регулятора, а также тип и масштаб спецификации уставки. USB-адаптер для программирования используется для настройки контроллеров скорости.
Режимы работы двигателей в сочетании с регуляторами скорости
Скорость двигателя регулируется ПИ-регулятором с переменными параметрами. В зависимости от версии, скорость в регуляторе скорости определяется через подключенную систему датчиков или без датчиков по току двигателя. Задание заданного значения может быть выполнено с использованием аналогового значения или сигнала ШИМ. Направление вращения изменяется с помощью отдельного переключающего входа. Кроме того, можно считывать сигнал скорости регулятора скорости через частотный выход. Двигатели могут дополнительно работать в режиме регулятора напряжения или в режиме фиксированной скорости.
Задание заданного значения может быть выполнено с использованием аналогового значения или сигнала ШИМ. Направление вращения изменяется с помощью отдельного переключающего входа. Кроме того, можно считывать сигнал скорости регулятора скорости через частотный выход. Двигатели могут дополнительно работать в режиме регулятора напряжения или в режиме фиксированной скорости.
Защитная функция регуляторов скорости
Регуляторы скорости FAULHABER определяют температуру обмотки двигателя по нагрузочной характеристике двигателя. В результате достигается динамический пиковый ток, который обычно в 2 раза превышает постоянный ток. При постоянно более высокой нагрузке ток ограничивается установленным длительным током. В случае частого реверсирования с большими присоединяемыми массами рекомендуется использовать контроллер движения.
Двигатели BL с цифровыми или аналоговыми датчиками Холла В конфигурации для бесщеточных двигателей с датчиками Холла двигатели работают с регулированием скорости, при этом сигналы от датчиков Холла используются для коммутации и определения фактической скорости для регуляторов скорости.
В этой комбинации двигателя BL и регулятора скорости датчики Холла не используются. Вместо этого противо-ЭДС двигателя используется для коммутации и управления скоростью.
Двигатели BL с абсолютным энкодеромЭту конфигурацию регуляторов скорости можно выбрать только в сочетании с соответствующим аппаратным обеспечением. В этой конфигурации энкодер выдает абсолютное положение. Это используется для коммутации, а также для управления скоростью. Из-за высокого разрешения энкодера (абсолютные энкодеры) в этом режиме можно достичь низких скоростей.
Двигатели BL с цифровыми датчиками Холла и входом торможения/разрешенияВ этой конфигурации двигатели в сочетании с регулятором скорости работают с регулируемой скоростью и предлагают дополнительные входы торможения и разрешения. Через эти входы более простое подключение системы управления, например. Возможны ПЛК или цепи безопасности.
Двигатели постоянного тока с энкодером В конфигурации, состоящей из двигателей постоянного тока с энкодером и регулятором скорости, двигатели работают с регулированием скорости с помощью инкрементного энкодера. Инкрементный энкодер необходим здесь как энкодер фактического значения для управления скоростью.
Инкрементный энкодер необходим здесь как энкодер фактического значения для управления скоростью.
В конфигурации с двигателями постоянного тока без энкодера двигатели с регулируемой скоростью работают без датчика с использованием регулятора скорости. В зависимости от заданного состояния нагрузки для получения фактического значения скорости используется либо противоэлектродвижущая сила (ЭДС), либо компенсация IxR. Для этого типа управления скоростью требуется согласование с соответствующим типом двигателя.
Регулирование скорости двигателя — imperix
Содержание
В этом техническом примечании объясняется, как реализовать регулирование скорости электродвигателя. Во-первых, в примечании представлены общие принципы управления скоростью двигателя независимо от типа используемого двигателя. Затем регулятор скорости настраивается методом симметричного оптимума. Наконец, представлена практическая реализация управления электроприводом лабораторного масштаба (двигатель и инвертор), нацеленная на B-Box RCP или B-Board PRO с ACG SDK на Simulink. Обратите внимание, что компания imperix предлагает готовую к использованию систему привода двигателя для разработки и тестирования методов управления двигателем. Более подробную информацию можно найти в кратком руководстве Motor Testbench.
Обратите внимание, что компания imperix предлагает готовую к использованию систему привода двигателя для разработки и тестирования методов управления двигателем. Более подробную информацию можно найти в кратком руководстве Motor Testbench.
Общие принципы управления скоростью двигателя
Электрический двигатель можно механически смоделировать как вращающуюся массу. Его инерция \(J_m\) можно повернуть, приложив к нему крутящий момент, который представляет собой разницу между электромагнитным крутящим моментом \(T_{em}\) и моментом нагрузки \(T_L\). Нагрузка является внешней по отношению к двигателю и не может управляться. Однако скорость ωm двигателя можно изменить, управляя электромагнитным моментом.
Соотношение между скоростью, инерцией и крутящим моментом формализуется вторым законом Ньютона для вращательного движения [1]:
$$(1) \qquad k_F \omega _m + J_{m} \frac{d \omega _m}{dt} = T_{em} – T_L $$
\(T_L\) момент внешней нагрузки приложенный к валу и \(k_F \omega_m\) – крутящий момент из-за трения. Тогда передаточная функция, связывающая крутящий момент со скоростью, будет следующей: {1/k_F}{1 + s \space J_m/k_F} = \frac{K_{1}}{1 + s \space T_{1}} $$
по сравнению с нагрузкой и крутящим моментом двигателя. В этом случае передаточная функция упрощается до:
$$ (3) \qquad H_2 (s) = \frac{\omega _m(s)}{T_{em}(s) – T_L} = \frac{1}{s \space J_m} = \frac {1}{s \space T_{2}} $$
Настройка цифрового регулятора скорости
В соответствии с передаточной функцией, полученной выше, объект представляет собой систему 1 st заказов. Следовательно, ПИ-регулятора достаточно, чтобы следовать постоянному заданию без постоянной ошибки. Поскольку упрощенный объект из (3) содержит чистый интегратор, пропорциональные и интегральные члены настраиваются с помощью 92 / Т_2\\[5pt]
\displaystyle K_p &= T_n \space / \space T_i \\[5pt]
\displaystyle K_i &= 1 \space / \space T_i
\end{массив} \right. $$
Поскольку упрощенный объект из (3) содержит чистый интегратор, пропорциональные и интегральные члены настраиваются с помощью 92 / Т_2\\[5pt]
\displaystyle K_p &= T_n \space / \space T_i \\[5pt]
\displaystyle K_i &= 1 \space / \space T_i
\end{массив} \right. $$
Параметр Ttot представляет общую задержку дискретного управления, которую можно вычислить с помощью PN142. Численный пример представлен ниже.
Критерий симметричного оптимума чувствителен к резким изменениям эталонного значения. В этом случае можно использовать корректор уставки, чтобы уменьшить перерегулирование [2]:
$$(5) \qquad H_{уставка,корректор}(s) = \frac{1}{1 + s \space T_2} $$
Альтернативой является использование ограничителя скорости для ограничения скорости изменения задание скорости двигателя.
Каскадное управление крутящим моментом и скоростью двигателя
Контроллер скорости двигателя генерирует только задание крутящего момента и, следовательно, должен каскадироваться с контроллером крутящего момента, чтобы воздействовать на двигатель. Контроллер крутящего момента может быть реализован с использованием, например, поля-ориентированного управления или прямого управления крутящим моментом (AN004).
Контроллер крутящего момента может быть реализован с использованием, например, поля-ориентированного управления или прямого управления крутящим моментом (AN004).
Как описано выше, настройка регулятора скорости зависит от общей задержки управления, которую можно вычислить, как в PN142. В случае управления скоростью двигателя регулятор скорости является внешним контуром управления, а регулятор крутящего момента — внутренним контуром.
Общая схема каскадного управления показана ниже.
Управление скоростью двигателя — схема каскадного управленияРеализация управления скоростью с помощью ACG SDK на Simulink
ACG SDK — это набор инструментов для Simulink и PLECS, который обеспечивает быстрое и простое графическое программирование контроллера силовой электроники B-Box или B-Board. В этом разделе описывается реализация управления скоростью двигателя и ее экспериментальная проверка с помощью инструментов прототипирования imperix. Модели Simulink и PLECS можно скачать ниже:
TN114_Motor_Speed_Control_simulink. zip Download
zip Download
TN114_Motor_Speed_Control.plecs Download
Каскадное управление скоростью двигателя
На рисунке ниже показана реализация каскадной структуры управления с поле-ориентированным управлением в качестве регулятора крутящего момента. Конечный автомат (FSM) контролирует работу двигателя. В частности, FSM получает желаемую скорость (в об/мин) от пользователя и ограничивает скорость ее изменения, чтобы уменьшить перерегулирование регулятора скорости.
Реализация Simulink каскадного управления скоростью двигателяСтруктура регулятора скорости двигателя
В этом примере приложения регулятор скорости работает в 100 раз медленнее, чем управление крутящим моментом. Таким образом, контроллер крутящего момента имеет в своем распоряжении достаточно времени, чтобы отрегулировать токи статора до того, как будет обновлено задание от регулятора скорости. Обратите внимание, что при использовании FOC задание крутящего момента должно быть преобразовано в текущее задание с использованием уравнения, разработанного в TN111. {-1} \end{массив} \right. $$ 92} $$
{-1} \end{массив} \right. $$ 92} $$
Определение задержек в цепочке управления каскадным управлением объясняется в PN142. В этой реализации Simulink внешний цикл был выбран в N = 100 раз медленнее, чем внутренний цикл. Следовательно, различные задержки:
$$(8) \qquad \left\{ \begin{array} \displaystyle T_{sens} \приблизительно 0 \\[5pt] \displaystyle T_{ctrl} = N \times T_s = \cfrac{100}{20 \, \text{кГц}} = 5 \,\text{мс}\\[5pt] \displaystyle T_{PWM} = \cfrac{T_{sw}}{2} = \ cfrac{1}{2 \times 20 \, \text{kHz}} = 25 \,\text{µs} \end{array}\right.$$ 9{-1} \\[5pt] \displaystyle K_p &= T_n \space / \space T_i = 0,029 \, \text{N}\,\text{m}\,\text{s}\\[5pt] \displaystyle K_i &= 1 \space / \space T_i = 1,43 \,\text{N}\,\text{m} \end{массив} \right. $$
Экспериментальные результаты
Экспериментальная установка состоит из СДПМ, питаемого от инвертора источника напряжения, управляемого контроллером прототипа B-Box. Управление ВОК реализовано с помощью графического программирования библиотеки ACG SDK для Simulink. Преобразователь мощности состоит из 4 модулей фазных ветвей PEB 8032 (3 фазы и 1 ветвь тормозного прерывателя). Другой СДПМ, подключенный к 3 силовым резисторам, используется в качестве тормоза для создания момента нагрузки.
Преобразователь мощности состоит из 4 модулей фазных ветвей PEB 8032 (3 фазы и 1 ветвь тормозного прерывателя). Другой СДПМ, подключенный к 3 силовым резисторам, используется в качестве тормоза для создания момента нагрузки.
Параметры двигателя
Контроллер скорости двигателя был проверен на синхронном двигателе с постоянными магнитами Unimotor fm от Control Techniques.
| Параметр | Значение | Единица измерения |
| Номинальная мощность | 1,23 | кВт |
| Пары полюсов | 3 | – |
| Номинальное фазное напряжение | 460 | В |
| Номинальный фазный ток | 2,7 | А 9 0174 |
| Номинальная механическая скорость | 314 | рад/с |
| Номинальный крутящий момент | 3,9 | Н·м |
| Сопротивление статора | 3,4 | Ом |
| Индуктивность статора (оси d и q) 9017 4 | 12,15 | мГн |
| Поток постоянного магнита, окружающего обмотку статора | 0,25 | Wb |
| Момент инерции (только СДПМ) | 2,9 | 90 171 кг см 2
Условия испытаний
- Крутящий момент нагрузки: 2 Нм (PMSM с резисторами в качестве нагрузки)
- Напряжение промежуточного контура: 500 В
- Инвертор: 4x PEB8032 (одна ножка для тормозного прерывателя)
- Частота прерывания и выборки: 20 кГц
- Фаза выборки: 0,5
- Выходы ШИМ: на основе несущей
- Метод управления моментом: Поле-ориентированное управление (FOC)
Результаты
Отслеживание производительности регулятора скорости двигателя было подтверждено экспериментально путем применения шага задания скорости от 0 до 1500 об/мин. Эксперимент проводился дважды с двумя разными ограничениями по скорости.
Эксперимент проводился дважды с двумя разными ограничениями по скорости.
Сначала ограничитель скорости был установлен на 100000 об/мин. Как показано ниже, СДПМ не может разогнаться с такой скоростью, потому что регулятор скорости достигает своего верхнего предела насыщения (1,1 о.е. номинального крутящего момента). Кроме того, тюнинг от симметричный оптимум критерия приводит к перерегулированию на 21%.
Для второго прогона эталонное отклонение было ограничено 5000 об/мин. В этом случае управление скоростью может следовать за ускорением задания скорости. Поскольку в управлении используется ПИ-регулятор 1 st порядка, он не может полностью устранить ошибку отслеживания во время рампы. Однако это имеет то преимущество, что механическая нагрузка на двигатель также снижается, поскольку система управления не применяет резко высокий крутящий момент при запуске. Более того, перерегулирование также снижено до 4,7%. Единственным недостатком по сравнению с первым экспериментом является увеличенное время установления 0,4 с по сравнению с 0,3 с.