
Регулятор оборотов двигателя постоянного тока в Салавате: 280-товаров: бесплатная доставка, скидка-59% [перейти]
Партнерская программаПомощь
Салават
Каталог
Каталог Товаров
Одежда и обувьОдежда и обувь
СтройматериалыСтройматериалы
Текстиль и кожаТекстиль и кожа
Здоровье и красотаЗдоровье и красота
Детские товарыДетские товары
ЭлектротехникаЭлектротехника
Продукты и напиткиПродукты и напитки
Дом и садДом и сад
Вода, газ и теплоВода, газ и тепло
ПромышленностьПромышленность
Мебель и интерьерМебель и интерьер
Все категории
ВходИзбранное
Регулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕ 12в220вРегулятор оборотов двигателяРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока — арт. 14026378
14026378
Регулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕ-13%
244
281
Регулятор контроллер скорости двигателя постоянного тока скорости электродвигателя, 10 А, 12/24 В, 36 В
ПОДРОБНЕЕ-16%
695
827
Регулятор скорости двигателя, ШИМ регулятор оборотов, 12 В, 24 В, 36 В, 48 В постоянного тока, 10 А
ПОДРОБНЕЕ-32%
654
962
Регулятор скорости двигателя, ШИМ регулятор оборотов, 12 В, 24 В, 36 В, 48 В постоянного тока, 10 А
ПОДРОБНЕЕ-24%
659
868
Регулятор скорости двигателя, ШИМ регулятор оборотов, 12 В, 24 В, 36 В, 48 В постоянного тока, 10 А
ПОДРОБНЕЕ-24%
284
374
Регулятор контроллер скорости двигателя постоянного тока для вентиляторов, 12 В, 24 В, 10 А, светодиодный светильник
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока (ШИМ) 1803BK Регулируемый переключатель драйвера
ПОДРОБНЕЕРегулятор скорости двигателя постоянного тока, 90 Вт, ШИМ, 12 В
ПОДРОБНЕЕ2 страница из 9
Регулятор оборотов двигателя постоянного тока
Регулятор скорости двигателя постоянного тока • HamRadio
от Foxiss
Регулятор скорости двигателя постоянного тока изменение скорости двигателя постоянного тока является фундаментальной задачей во многих схемах приводов. В статье представлен несложный и, самое главное, «не микропроцессорный» двунаправленный регулятор скорости вращения двигателя постоянного тока с использованием метода ШИМ. Регулятор будет полезен для самостоятельных разработчиков для регулирования скорости инструментов и в устройствах, которые они собирают.
В этом устройстве потенциометр используется для регулировки скорости двигателя постоянного тока. В крайнем положениях двигатель работает на максимальной скорости в заданном направлении. Двигатель останавливается и тормозит, когда потенциометр находится в среднем положении. Изменение направления выполняется автоматически в зависимости от положения потенциометра.
В крайних положениях сигнал ШИМ имеет 100% заполнение, что обеспечивает минимальные потери при максимальной скорости. «Нулевое» положение имеет мертвую зону, что способствует остановке двигателя. Регулятор может питаться напряжением в диапазоне 8 … 30В постоянного тока, что обеспечивает взаимодействие с типовыми двигателями постоянного тока. Максимальная токовая пропускная способность регулятора составляет 2А. Принципиальная схема регулятора представлена на рисунке.
«Нулевое» положение имеет мертвую зону, что способствует остановке двигателя. Регулятор может питаться напряжением в диапазоне 8 … 30В постоянного тока, что обеспечивает взаимодействие с типовыми двигателями постоянного тока. Максимальная токовая пропускная способность регулятора составляет 2А. Принципиальная схема регулятора представлена на рисунке.
Регулятор скорости двигателя постоянного тока состоит из четырех функциональных блоков:
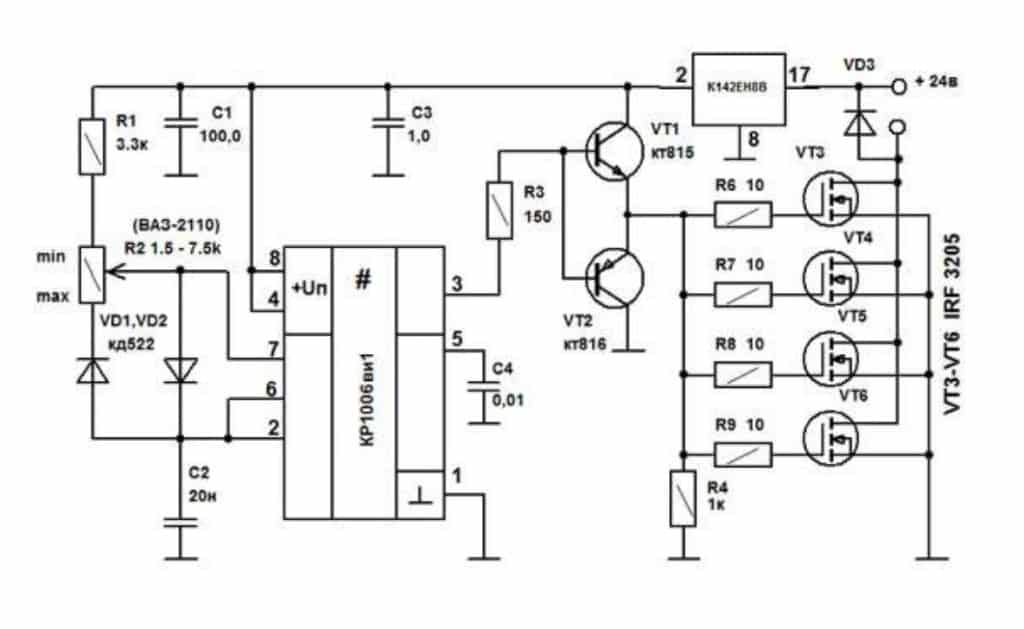
Ну и конечно источник питания схемы управления обеспечивает стабилизатор U5 LM317.Схема регулятор скорости двигателя постоянного тока основана на специализированной интегральной микросхеме DRV8871 (U3). Блок-схема привода показана на рисунке.
Он содержит все компоненты, необходимые для управления щеточным электродвигателем постоянного тока два полумоста MOSFET с низким сопротивлением и систему измерения тока двигателя, для которой не требуются внешние компоненты, логика безопасности, встроенная система защиты от перегрузки и тепловой защиты и логика управления входом.
Встроенный датчик тока двигателя не требует внешнего измерительного резистора, но все же можно изменить максимальный ток обмотки, выбрав резистор, подключенный к выводу ILim, в соответствии с формулой ILim = 64 / R8. В прототипе ток был установлен на 2А, что соответствует сопротивлению R8 около 33 к. Минимальное значение резистора было установлено на уровне 15 к. Резистор следует выбирать в зависимости от используемого двигателя. Направление вращения регулируется L / R с использованием входов IN1 / IN2.
Логическая схема, выполнена с использованием микросхемы U2 (74HC00), которая изменяет управление на стандарт PWM / DIR. Двухцветный светодиод указывает направление вращения и индикацию заполнения ШИМ. Компаратор на операционном усилителе U4A сравнивает напряжение от ползунка потенциометра ШИМ с опорным напряжением REF = 2,5В, генерируя внутренний сигнал DIR, определяющий направление вращения двигателя. Опорное напряжение является производным от напряжения питания 5В (стабилизированном U5) через делитель R23 / R24 и буферизуется цепь U4B. Когда заполнение сигнала ШИМ равно 0%, двигатель останавливается. ШИМ-сигнал генерируется микросхемой UC LTC6992-1, блок-схема которой показана на рисунке.
Когда заполнение сигнала ШИМ равно 0%, двигатель останавливается. ШИМ-сигнал генерируется микросхемой UC LTC6992-1, блок-схема которой показана на рисунке.
Она содержит все блоки, необходимые для реализации генератора ШИМ с фиксированной частотой и регулируемым рабочим циклом. Опорная частота встроенного генератора устанавливается резистором, подключенным к входу SET (R1). Дополнительное деление частоты устанавливает делитель, подключенный к выводу DIV (R2 / R3). Изменение напряжения на клемме MOD в диапазоне 0 … 1В изменяет рабочий цикл в пределах 0 … 100%.
В прототипе частота генератора была установлена на уровне около 128 кГц, а степень деления на уровне 256, что дает тактовую частоту 500 Гц. Управляющий сигнал генератора ШИМ генерируется в схеме из двух дифференциальных усилителей U4C / U4D, которые отвечают за преобразование напряжения 0 … 5В от потенциометра ШИМ в управляющее напряжение MOD U1 в диапазоне 0 … 1 В.
Усилитель U4C работает для напряжения потенциометра в диапазоне 2,5 … 5В, масштабирование их до диапазона 0 … 1,7В, а U4D соответственно от 0 … 2,5В до 1,7 … 0В..jpg.63a87bad5c013386e4fbb043922c184b.jpg) Диоды D2 и D3 добавляют напряжение к усилителям U4C / U4D и вместе с резисторами R15, R20 вводят небольшую мертвую зону в среднее положение потенциометра. Диоды D4 и D5 защищают вход MOD U1 от превышения допустимого диапазона напряжения.
Диоды D2 и D3 добавляют напряжение к усилителям U4C / U4D и вместе с резисторами R15, R20 вводят небольшую мертвую зону в среднее положение потенциометра. Диоды D4 и D5 защищают вход MOD U1 от превышения допустимого диапазона напряжения.
Напряжение питания 5В выполнено на стабилизаторе U5 LM317 в типовом включении. Питание регулятора осуществляется через разъем PWR напряжением от 8 … 30В с мощностью, соответствующей используемому двигателю. Двигатель подключен к разъему DCM, модуль контроллера собран на двусторонней печатной плате, которая показана на рисунке.
В зависимости от требуемой точности регулировки вместо обычного потенциометра (PWM) вы можете применить SIP-разъем и использовать внешний многооборотный потенциометр с сопротивлением 1 к. Микросхема U3 может быть оснащена небольшим радиатором для облегчения рассеивания тепла. Правильно собранный регулятор скорости двигателя постоянного тока, не нуждается в настройке, но стоит проверить управляющие напряжения CTRL, DIR, PWM в зависимости от положения потенциометра. Иногда стоит осознать, что даже в 21 веке не все нужно делать с помощью микроконтроллера или микропроцессора.
Иногда стоит осознать, что даже в 21 веке не все нужно делать с помощью микроконтроллера или микропроцессора.
© 2023 HamRadio • Создано с помощью GeneratePress
Регуляторы скорости двигателя постоянного тока — Grainger Industrial Supply
Регуляторы скорости двигателя постоянного тока
47 товаров
Эти регуляторы регулируют скорость двигателя постоянного тока. Они управляют регулируемыми скоростями разгона и торможения и защищают двигатель от внезапных скачков напряжения. Устройства с широтно-импульсной модуляцией (ШИМ) регулируют импульсы напряжения для регулирования скорости. Кремниевый управляемый выпрямитель (SCR) преобразует переменное напряжение в постоянное и обеспечивает регулирование скорости. Эти регуляторы скорости используются с двигателями постоянного тока с постоянными магнитами или с параллельными обмотками, а также с редукторными двигателями постоянного тока в устройствах с постоянным или уменьшающимся крутящим моментом, таких как конвейеры, упаковочное оборудование и центрифуги.
ШИМ регуляторы скорости постоянного тока
Открыты
ШИМ регуляторы скорости постоянного тока открыты, отсортированы по максимальному току, по возрастанию| Загрузка… |
В корпусе — NEMA 4X
ШИМ-регулятор скорости постоянного тока В корпусе — NEMA 4X, отсортировано по максимальному току в порядке возрастания Загрузка. .. .. |
SCR Управление скоростью постоянного тока
Открыто
SCR Управление скоростью постоянного тока s Открытый, отсортированный по Максимальному току, по возрастанию| Загрузка… |
Корпус – IP30
Регуляторы скорости пост.4Закрыта – NEMA 1
Регуляторы скорости постоянного тока SCR в комплекте – NEMA 1, отсортировано по максимальному току в порядке возрастания Загрузка. .. .. |
Закрытый – NEMA 4
90 005 SCR Регуляторы скорости постоянного тока в закрытом корпусе — NEMA 4, отсортировано по максимальному току, по возрастанию| Загрузка… |
Закрытый — NEMA 4X
SCR Регуляторы скорости постоянного тока Закрытый — NEMA 4X, отсортировано по максимальному току в возрастающем порядке| Идет загрузка. |
AB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Введение
Скорость двигателя — это параметр двигателя постоянного тока, который часто измеряется и контролируется, как правило, с помощью дополнительных датчиков и обратной связи с обратной связью. Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторы имеют задние валы именно для этой цели, например, 212-109.
Система управления с обратной связью для скорости двигателя постоянного тока Эта блок-схема представляет собой типичную систему управления с замкнутым контуром, которая может быть спроектирована для аналогового или цифрового управления.
Датчики Холла и оптические датчики обычно используются с цифровыми контроллерами, тогда как в аналоговых схемах часто используются тахогенераторы. При ШИМ-управлении можно добиться хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для коллекторных двигателей постоянного тока можно измерять и контролировать скорость без каких-либо датчиков на двигателе, используя базовую характеристику — напряжение противо-ЭДС, зависящее от скорости.
Аналоговое измерение скорости двигателя без датчика
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения противо-ЭДС. Напряжение на клеммах двигателя представляет собой сумму противо-ЭДС и напряжения, падающего на сопротивление катушки.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Эквивалентная схема коллекторного двигателя постоянного токаПадение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки). Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra, как правило, постоянное – хотя оно и имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку прямое измерение обратной ЭДС невозможно, ее необходимо рассчитать по следующему уравнению:
К сожалению, напрямую измерить напряжение якоря тоже нельзя, однако можно подключить дополнительный (внешний) резистор последовательно с двигателем. Измерение падения напряжения на этом последовательном резисторе позволяет определить противо-ЭДС.
Если мы установим значение последовательного резистора равным сопротивлению двигателя, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения на якоре: 𝑉𝑎=𝐼𝑎×𝑅𝑎𝑉𝑠=𝐼𝑎× 𝑅𝑠𝑅𝑠=𝑅𝑎𝑉𝑠=𝑉𝑎
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя. Это можно сделать, измерив сопротивление на клеммах двигателя с помощью омметра или измерив ток останова при известном напряжении питания. При использовании последнего предпочтительно использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при подаче на двигатель 1,2 В и измерении 100 мА во время остановки сопротивление якоря рассчитывается как: 𝑝𝑝𝑙𝑦𝐼𝑠𝑡𝑎𝑙𝑙𝑅𝑎=1,2𝑉100𝑚𝐴𝑅𝑎=12 Ом
При использовании омметра для измерения сопротивления выводов снимите среднее значение нескольких показаний при различных положениях ротора.
Напряжение питания будет равно последовательному напряжению резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.
Мы можем рассчитать напряжение обратной ЭДС, вычитая двойное падение напряжения на последовательном резисторе из напряжения питания.
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге уменьшит напряжение, воспринимаемое двигателем. С помощью мостовой схемы можно сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения противо-ЭДС Правая ветвь моста состоит из последовательно соединенных двигателя 
Rнагрузка представляет собой входное сопротивление нашей измерительной схемы. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа цепи без обратной ЭДС, т.е. когда двигатель заглох. Для балансировки моста напряжение между точками A и B должно быть равно нулю. Это происходит до тех пор, пока соотношение между R1 и R2 такой же, как Rs и Ra :𝑅2𝑅1=𝑅𝑎𝑅𝑠
h коэффициент усиления нашего моста:ℎ=𝑅1𝑅2=𝑅𝑠𝑅𝑎
Если мы выведем двигатель из состояния остановки, напряжение противоЭДС будет пропорционально скорости: 𝑉𝑏𝑒𝑚𝑓=𝑘𝑒×𝑛
, где ke — электрическая постоянная для нашего двигателя, а n — скорость двигателя.
Если двигатель может вращаться на скорости холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это связано с тем, что идеальные двигатели не учитывают сопротивление воздуха и трение в подшипниках. Напряжение на скорости без нагрузки:𝑉𝑟𝑝𝑚𝑁𝐿=𝑘𝑒×𝑛𝑁𝐿
Отсюда Vbemf может быть подписано как: 𝐾
Где K — коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме.
Теперь мы можем составить систему уравнений для нашей схемы:
Текущие уравненияРешение для I5 :𝐼5=ℎ(ℎ+1)𝑉𝑟𝑝𝑚𝑁𝐿×𝐾2ℎ(𝑅𝑎+𝑅2)+(ℎ+1)2×𝑅𝑙𝑜𝑎𝑑
Таким образом, выходное напряжение равно: ℎ+1)2×𝑅𝑙𝑜𝑎𝑑×𝑅𝑙𝑜𝑎𝑑
И для работы без нагрузки:𝑉𝑟𝑝𝑚=ℎℎ+1×𝑉𝑟𝑝𝑚𝑁𝐿×𝐾
Выходное напряжение между точками A и B не зависит от источника питания и тока двигателя как без нагрузки, так и в режиме нагрузки. Оно зависит от х , и при увеличении выходного напряжения также увеличивается.
Как упоминалось ранее, сопротивление якоря будет меняться в зависимости от температуры, что разбалансирует мост и повлияет на выходную мощность об/мин . Мост следует настраивать при рабочей температуре двигателя, чтобы свести к минимуму этот эффект.
Этот метод стабилизации скорости был популярным решением для регуляторов скорости ротора регулятора скорости, используемых в магнитофонах с использованием аналоговой электроники. В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие ИСвключали LA5586, TDA7274, BA6220 и AN6550. К сожалению, большинство из них снято с производства и теперь доступно только на вторичном рынке. Схемы в ИС были немного другими, но принцип работы по-прежнему основан на мостовой схеме выше.
Обратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной микросхемы, и обозначается как 9.0239 К . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной микросхемы, и обозначается как 9.0239 К . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одному плечу перемычки, а второе звено содержит резистор со значением K раз больше, чем внутреннее сопротивление двигателя.
Цепь установившегося режима для контроллера двигателяВ установившемся режиме ток двигателя в K раз больше, чем ток через Rt . Отрицательный вход ОУ подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже напряжения двигателя. Разница будет равна Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs ток через Rt в 40 раз меньше тока двигателя.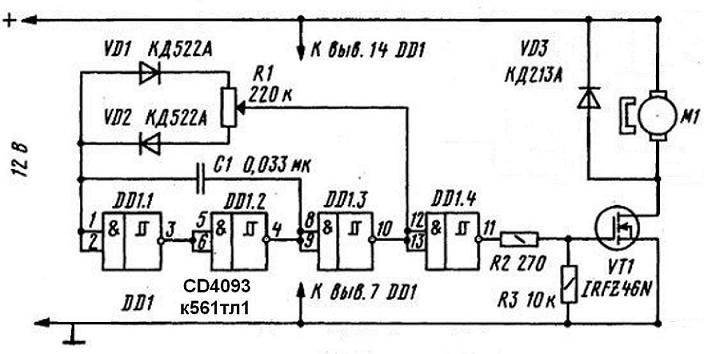 При увеличении нагрузки двигателя напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулирование скорости может быть достигнуто добавлением шунтирующего резистора – напряжение между точками A и B всегда равны опорному напряжению, поэтому легко контролировать дополнительный ток, добавляемый к Rt .
При увеличении нагрузки двигателя напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулирование скорости может быть достигнуто добавлением шунтирующего резистора – напряжение между точками A и B всегда равны опорному напряжению, поэтому легко контролировать дополнительный ток, добавляемый к Rt .
Эта цепь будет сбалансирована, когда напряжение двигателя равно сумме напряжений между Rt и Rs ( Vref ). Уравнение стационарного состояния: Отсюда уравнение для обратной ЭДС: –𝑅𝑚×𝐼𝑚
Предполагая:𝐾×𝑅𝑚=𝑅𝑇
тогда число оборотов определяется как Вбэмф являются:𝑉𝑏𝑒𝑚𝑓=𝑉𝑟𝑒𝑓+𝑅𝑇×(1+1𝐾)×𝐼𝑠
Важно, что во всех случаях Rt должен быть меньше K x Rm, иначе схема будет перекомпенсирована и нестабильна.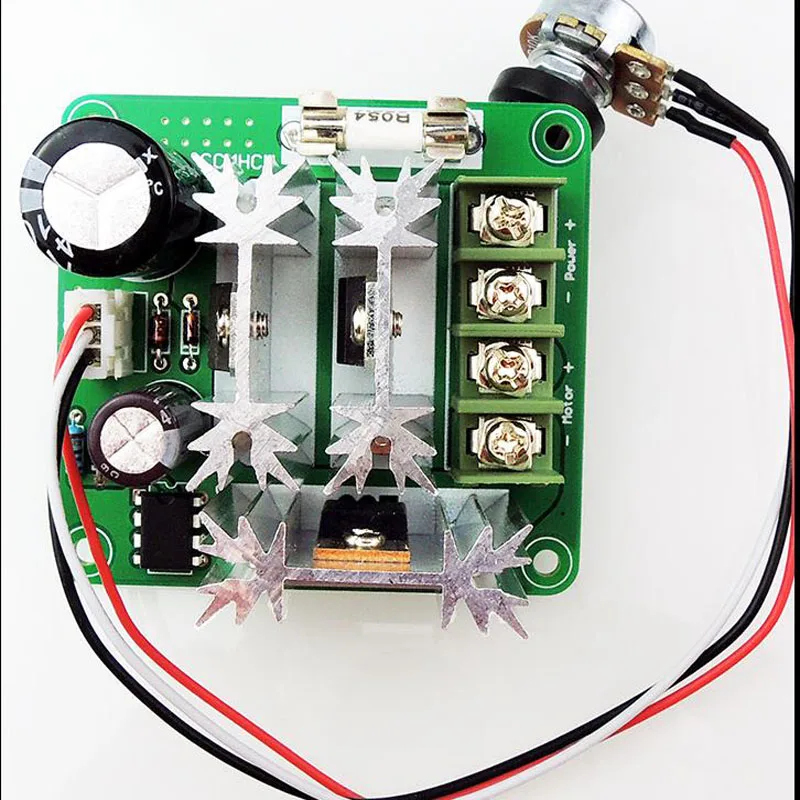
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и снижению скорости. Обратная ЭДС и напряжение на двигателе также уменьшаются, этот метод управления известен как регулятор отрицательной клеммы.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наше R_load будет на тысячи больше, чем другие сопротивления в этой цепи, и его снова можно опустить.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось В об/мин , что позволяет нам питать нашу схему от мощного операционного усилителя или добавлять транзистор к выходу стандартного операционного усилителя. усилитель Подключив инвертирующий вход к плечу моста, между двигателем и добавочным резистором, мы можем управлять питанием моста напряжением, подключенным к неинвертирующему выходу.
Цепь управления напряжением двигателя Входное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем управлять скоростью с помощью схемы, в связи с этим наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1. По сути, входное напряжение определяет напряжение двигателя.
Мы пока не можем управлять скоростью с помощью схемы, в связи с этим наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1. По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, задав напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря. Это можно сделать, изменив схему к приведенной ниже — добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателя Соотношение R1 и R2 должно быть таким же, как Rs и Ra для обеспечения стабилизации скорости. На изображении выше показана полная схема и ее эквивалент для справки, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС на желаемой скорости.
На изображении выше показана полная схема и ее эквивалент для справки, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС на желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, чем менять R1 или R2 соответственно.
Если скорость двигателя снижается при приложении нагрузки, R2 значение должно быть увеличено (или R1 должно быть уменьшено). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, R2 следует уменьшить или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какова величина противо-ЭДС при желаемой скорости:
- Чтобы определить напряжение противо-ЭДС при желаемой скорости, вал двигателя можно установить на бурильную машину и привести в движение.
 Достигнув желаемой скорости (проверено тахометром), измерьте напряжение на клеммах двигателя с помощью высокоимпедансного вольтметра.
Достигнув желаемой скорости (проверено тахометром), измерьте напряжение на клеммах двигателя с помощью высокоимпедансного вольтметра. - Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя, рекомендуется получить среднее значение из нескольких различных измерений положения ротора.
- Выберите значение для Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические номиналы резисторов должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление ветвей моста будет разным, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, соответствующее желаемой противо-ЭДС.
- Проверьте скорость и внесите соответствующие коррективы (указанные в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и у обмоток двигателя – для меди 3400ppm. Этот резистор следует разместить как можно ближе к двигателю, чтобы поддерживать одинаковый температурный режим.
Простую схему стабилизации скорости двигателя можно сделать только на транзисторах:
Транзисторный регулятор скоростиВ этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки. Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база — как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере T1 всегда ниже напряжения на клеммах двигателя.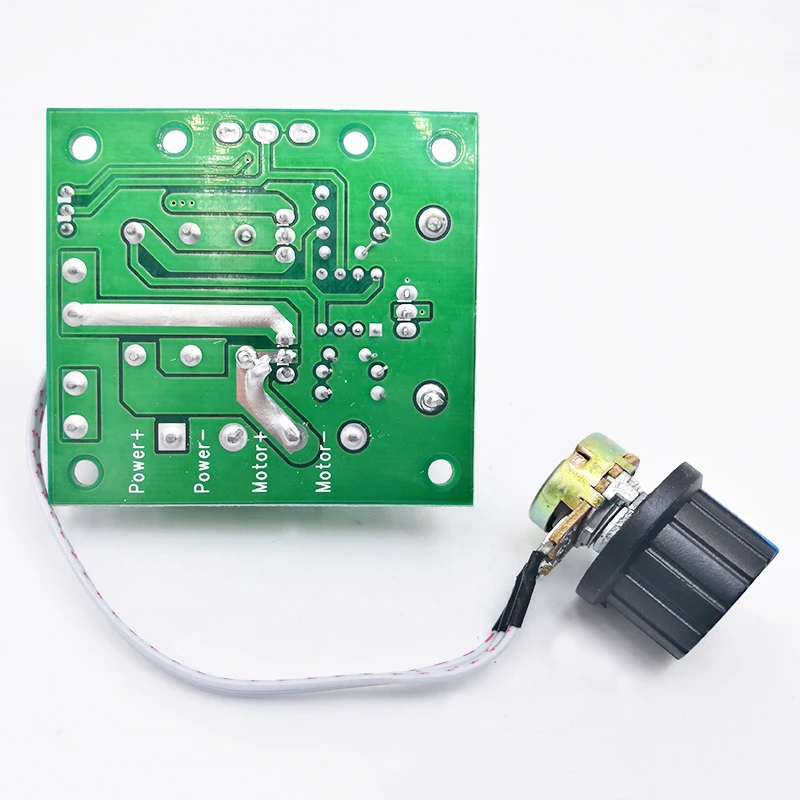 Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 представляют собой схему запуска, помогающую преодолеть статическое трение, в то время как C1 — конденсатор частотной компенсации, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение противоЭДС, которое зависит от контактного сопротивления между коллектором и щетками, лучше всего использовать двигатели с металлическими щетками. Большинство двигателей Precision Microdrives имеют металлические щетки и подходят для этого метода регулирования скорости.
Регулятор скорости со специализированной ИС
Эта схема основана на AN6651, специализированном контроллере двигателя, ранее популярном в магнитофонах.
AN6651 работает по тому же принципу, что и LA5586, описанный выше.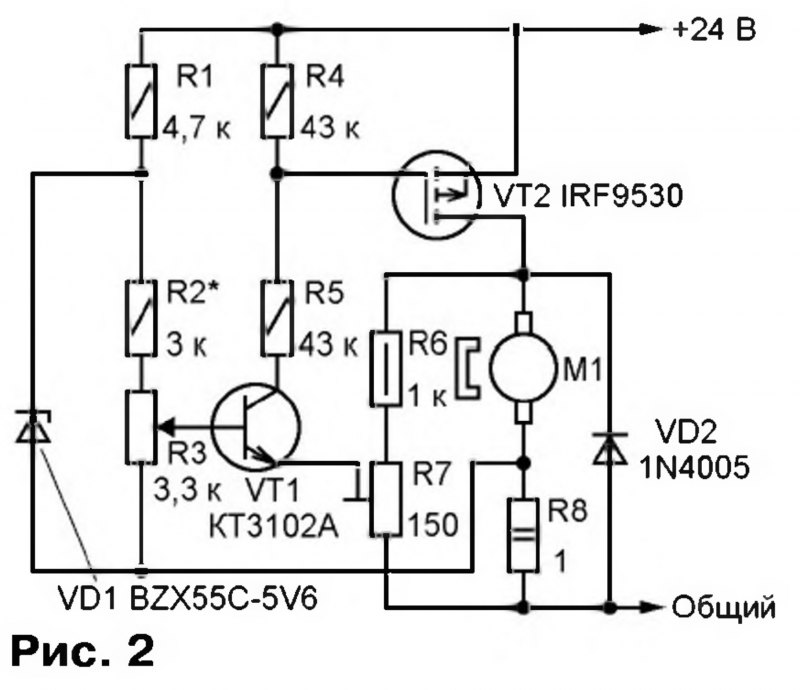 Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40:1.
Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40:1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя при таком же падении напряжения на R1 , как и на внутреннем сопротивлении двигателя: 𝐾=40 𝑅1=𝐾×𝑅𝑚
AN6651 работает по тому же принципу, что и LA5586, описанный выше. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40:1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя при таком же падении напряжения на R1 , как и на внутреннем сопротивлении двигателя: 𝐾=40 𝑅1=𝐾×𝑅𝑚
Например, используя стандартное значение 390 Ом для R1 (более низкое значение снижает тенденцию к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3. Давайте воспользуемся двигателем постоянного тока 132-100 и установим целевую скорость 2400 об/мин. Сначала нам нужны некоторые технические детали:
Давайте воспользуемся двигателем постоянного тока 132-100 и установим целевую скорость 2400 об/мин. Сначала нам нужны некоторые технические детали:
- Сопротивление двигателя, 𝑅𝑚=10 Ом
- Входное напряжение на холостом ходу при скорости 2400 об/мин, 𝑉𝑚=3,87 𝑉
- Ток на холостом ходу при скорости 2400 об/мин, 𝐼𝑚=23 𝑚𝐴
Мы можем рассчитать падение напряжения на внутреннее сопротивление как: 23 Ом × 10 Ом = 0,23 Ом
, и мы также можем рассчитать Vbemf как: 3,87 Ом −0,23 Ом = 3,65 Ом
В установившемся режиме, когда цепь сбалансирована, уравнение для цепи: 𝐼𝑚 ×𝑅𝑚+𝑉𝑏𝑒𝑚𝑓=𝑅1×(𝐼𝑅2𝑅3+𝐼𝑅2𝑅3+𝐼𝑚𝐾+𝑉𝑟𝑒𝑓
Из этого уравнения мы можем вычислить противо-ЭДС: 𝑉𝑏𝑒𝑚𝑓=𝑉𝑟𝑒𝑓+𝑅1×(1+140)×𝐼𝑅2𝑅3
Как известно из даташита Vref = 1В, поэтому:𝐼𝑅2𝑅3=𝑉𝑏𝑒𝑚𝑓–𝑉𝑟𝑒𝑓𝑅1×(1+140)
Для нашего двигателя имеем:𝐼𝑅2𝑅3=3,64–1390×(1+140)𝐼𝑅2𝑅3=0,0051𝐴 =5,1𝑚𝐴
С этим значением мы можем рассчитать последовательное сопротивление R2 и R3 :𝐼𝑅2𝑅3=𝑉𝑟𝑒𝑓𝑅2+𝑅3𝑅2+𝑅3 =𝑉𝑟𝑒𝑓𝐼𝑅2𝑅3𝑅2+𝑅3=195 Ом
Мы можем использовать постоянный стандартный резистор 150 Ом плюс Потенциометр на 100 Ом, что дает нам диапазон для точной настройки.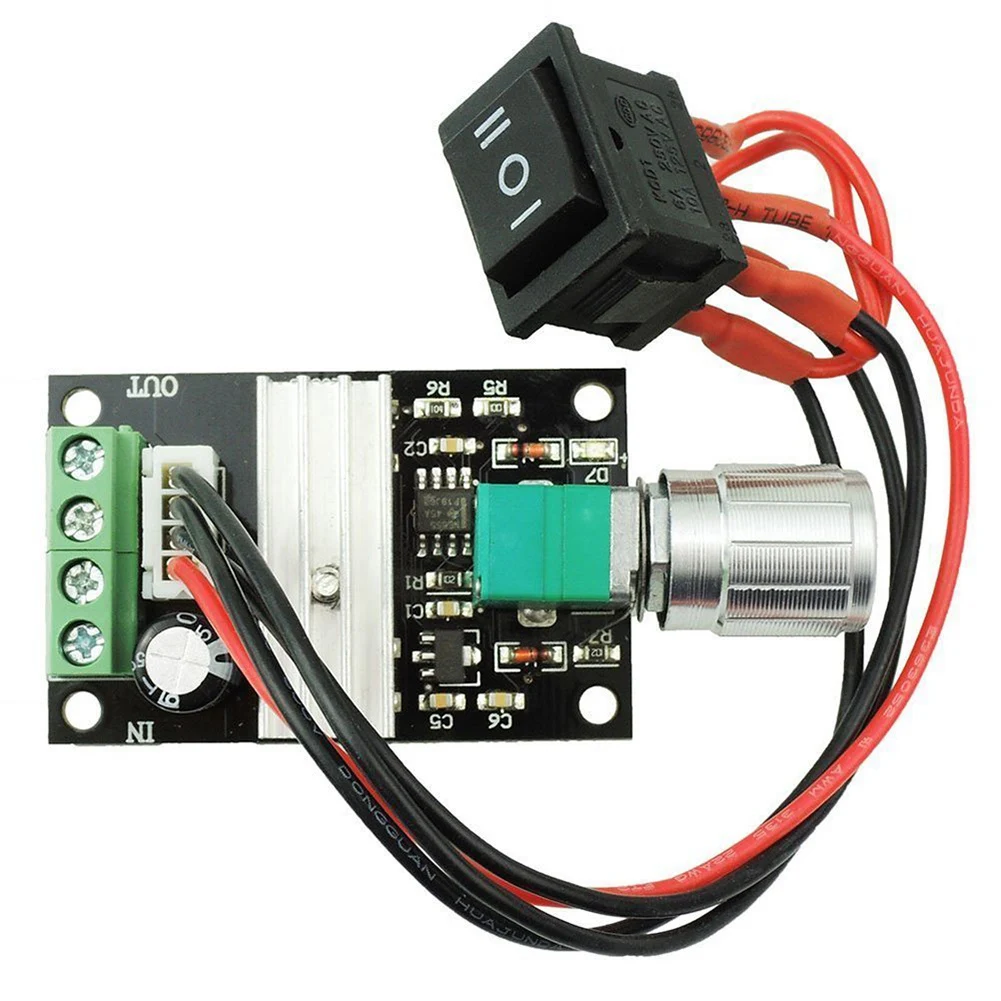 Расчетные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также значителен (между 0,8 – 2 мА для AN6651), это вызовет изменение тока двигателя.
Расчетные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также значителен (между 0,8 – 2 мА для AN6651), это вызовет изменение тока двигателя.
Добавление потенциометра позволяет настройке регулировать скорость, и его необходимо откалибровать через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы свести к минимуму результирующий сдвиг сопротивления.
132-100 и цепь регулятора скорости AN6651Плата Precision Microdrives 132-100 с AN6651
Плата Precision Microdrive 132-100 с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС. Основным улучшением является работа при низком напряжении благодаря использованию эталона с низким напряжением запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
В этой схеме компенсационное напряжение берется с последовательно включенного резистора R8 , значение которого меньше внутреннего сопротивления двигателя для снижения потерь мощности. Вторая опора моста состоит из R6 и R7 . Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя. R8 можно выбрать в качестве типового значения, тогда R6 и R7 следует выбрать для компенсации внутреннего падения напряжения. Для стабильной работы коэффициент R7 / R6 должно быть больше, чем Rm / R8 .
Эта схема подходит для небольших двигателей с номинальным напряжением 1В ~ 2В.
Схема стабилизации скорости двигателя на основе операционного усилителяКонтроллер скорости с транзисторами
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, а D1 работает как опорное напряжение. Противо-ЭДС двигателя больше, чем опорное напряжение – в зависимости от делителя напряжения R2 , R3 и R4 :
- требуемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: 3,61,2=3·
- Итак, у нас есть максимальный диапазон для тонкой настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из остальных резисторов.
- Когда мы знаем наш коэффициент делителя напряжения, выбрать R6 и R8 несложно. Нам нужно иметь такое же соотношение между делителем напряжения R6 , R8 и внутренним сопротивлением двигателя.
Эта схема рассчитана на одну постоянную скорость, и изменение скорости с помощью триммера влияет на компенсацию скорости.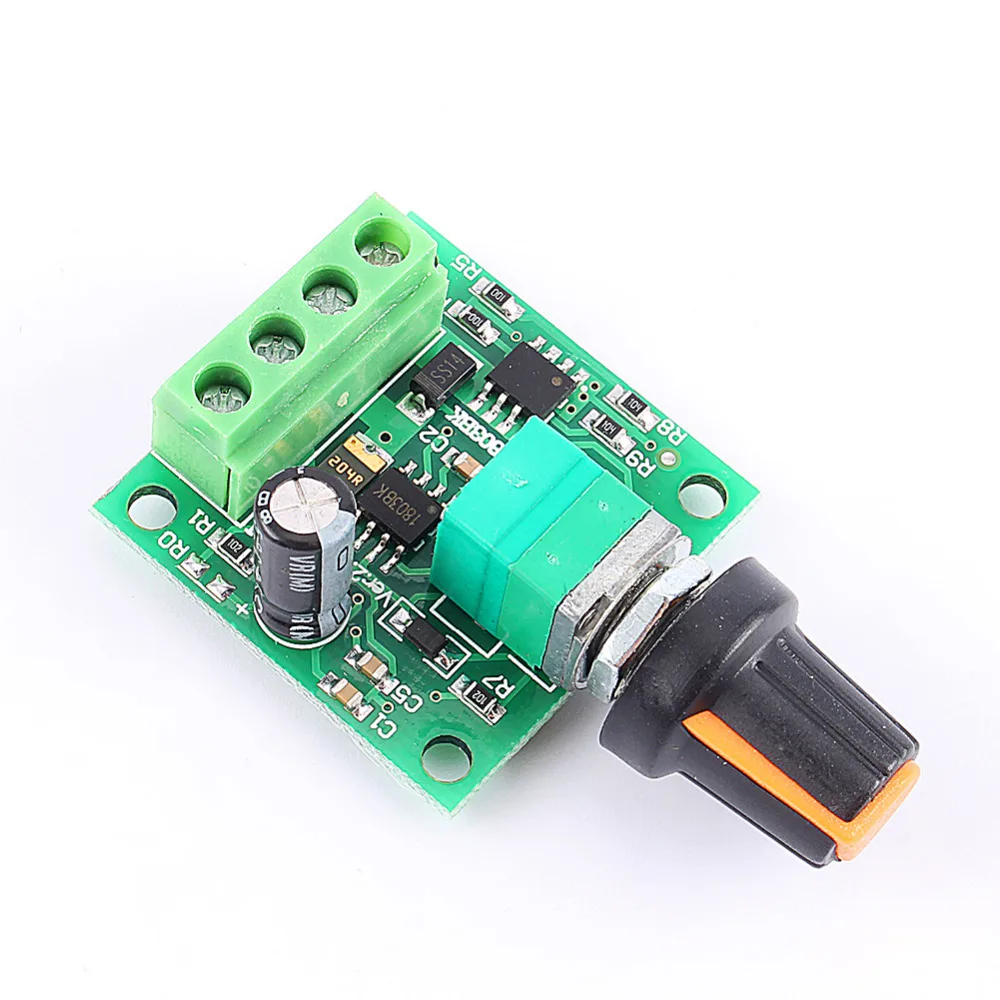 Таким образом, триммер следует использовать только для настройки этой схемы в очень низкоскоростных диапазонах. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам нужно внести некоторые изменения:
Таким образом, триммер следует использовать только для настройки этой схемы в очень низкоскоростных диапазонах. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам нужно внести некоторые изменения:
Трехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая двухтранзисторная версия, но основное улучшение заключается в увеличении коэффициента усиления по опорному напряжению с помощью транзистора Q2 . Это позволяет нам использовать опорное напряжение с запрещенной зоной микромощности, которое более стабильно, чем стандартные диоды. Еще одним улучшением от добавления Q2 является температурная компенсация Vbe между 9Транзисторы 0239 Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения противо-ЭДС. В этой схеме опорное напряжение равно LM385 – 2,5 В и напряжение Vbe Q2 :𝑉𝑟𝑒𝑓=𝑉𝑏𝑔𝑟𝑒𝑓+𝑉𝑏𝑒=1. 2𝑉+0 .7𝑉=1.9𝑉
2𝑉+0 .7𝑉=1.9𝑉
Если нам нужно Vbemf , чтобы было 3,8В , коэффициент делителя напряжения R2 , R4 и R3 должен быть 2:1. Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Итак, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После настройки этого делителя напряжения выбор значений R6 и R7 не представляет сложности, если известно внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должно иметь такое же отношение, как R2 , R3 и R4 делителя напряжения (с R3 потенциометр установлен в среднее положение).
Precision Microdrives Трехтранзисторный контроллер скорости двигателя
Аналоговый регулятор скорости с режимом переключения
В данных указаниях по применению описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении противо-ЭДС и управляющем ШИМ-сигнале.
При использовании ШИМ с двигателем постоянного тока по-прежнему можно управлять скоростью двигателя без каких-либо датчиков. Используя обычный недорогой драйвер с одним полевым МОП-транзистором, можно измерить противо-ЭДС, когда двигатель вращается, а транзистор закрыт.
Управление скоростью двигателя с помощью противо-ЭДС в режиме переключения аналоговая схемаЭтот контроллер состоит из ШИМ-модулятора, выходного транзистора и схемы «выборка и удержание» (иногда называемой схемой «следуй и удерживай»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл. Если это незнакомо, это может показаться сложным, но общая идея довольно проста:
- когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор, а Vm равно Vbemf , что пропорционально скорости двигателя.
 Запускается схема Sample & Hold, которая сохраняет выборку Vbemf в конденсаторе
Запускается схема Sample & Hold, которая сохраняет выборку Vbemf в конденсаторе
Затем суммирующий узел вычисляет разницу между требуемой скоростью и текущей скоростью, так как обе они представлены напряжением (желаемое напряжение и
).0239 Вбэмф соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивной природы двигателей постоянного тока измерение противо-ЭДС невозможно сразу после выключения транзистора. Когда транзистор переключается, генерируется сильный индуктивный всплеск, и индуктивный рециркуляционный ток Ir протекает через реверсивный диод. Необходима короткая задержка, пока напряжение противоЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателя Этот метод управления может быть выполнен с использованием только аналоговых компонентов или цифровых с микроконтроллером.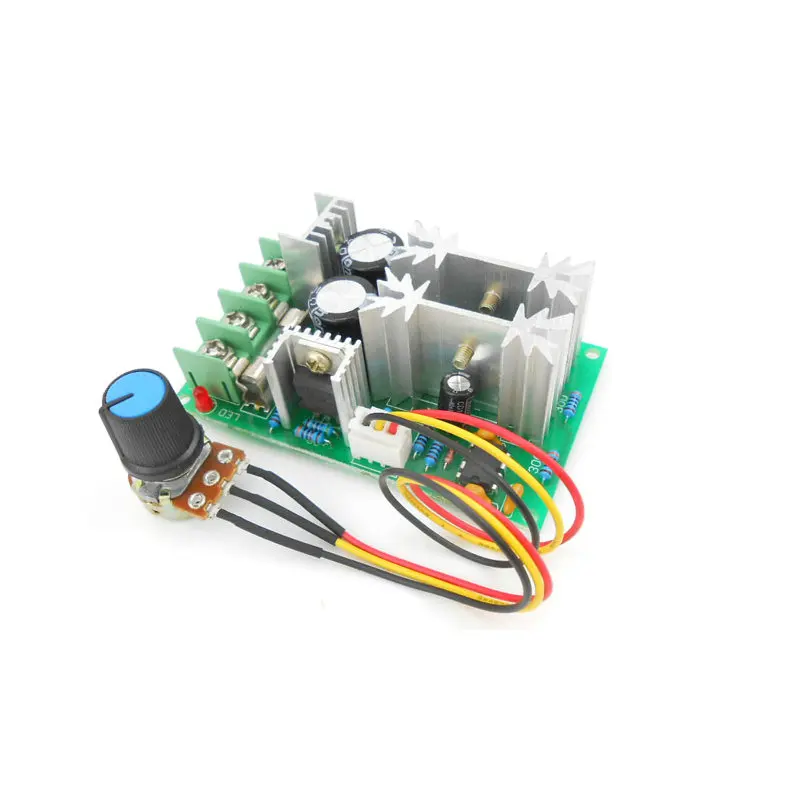 Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
В этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема модулятора ШИМ состоит из IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 9024. 0 .
IC2 действует как компаратор, который сравнивает напряжение сигнала треугольника с выхода IC2 с заданным напряжением потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий, и двигатель включен.
Цепь Sample & Hold изготовлена C3 , R10 , D2 , Q1 , R13 . Когда двигатель питается от T1 , Q2 включен, а узел R13 и D2 закорочен на землю, что не позволяет сделать выборку при подаче напряжения Vcc на двигатель. Диод D2 предотвращает разряд C3 , когда Q1 включен.
Когда двигатель питается от T1 , Q2 включен, а узел R13 и D2 закорочен на землю, что не позволяет сделать выборку при подаче напряжения Vcc на двигатель. Диод D2 предотвращает разряд C3 , когда Q1 включен.
Когда T1 выключен, Q2 также выключен и Vbemf может заряжать конденсатор C3 . Напряжение на C3 подается на неинвертирующий вход усилителя ошибки IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (задается потенциометром R2 ). Когда противо-ЭДС увеличивается, выходное напряжение на IC1A также увеличивается — это сдвигает уровень сигнала треугольника вверх пропорционально погрешности скорости. Если уровень сигнала треугольника увеличивается, то время, в течение которого выходной транзистор находится во включенном состоянии, уменьшается, и коэффициент ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-управления, где коэффициент усиления определяется 𝑅5𝑅5+𝑅10, а постоянная времени определяется R5 и C2 .
Схема Sample & Hold очень проста, потому что время выборки равно продолжительности состояния OFF в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя. Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменить время заряда/разряда C3 .
Диапазон изменения коэффициента заполнения ШИМ (от приложенного напряжения ошибки) определяется отношением R7 к R8 || R9 , однако, поскольку схема Sample & Hold настолько проста, этот диапазон не должен быть очень широким.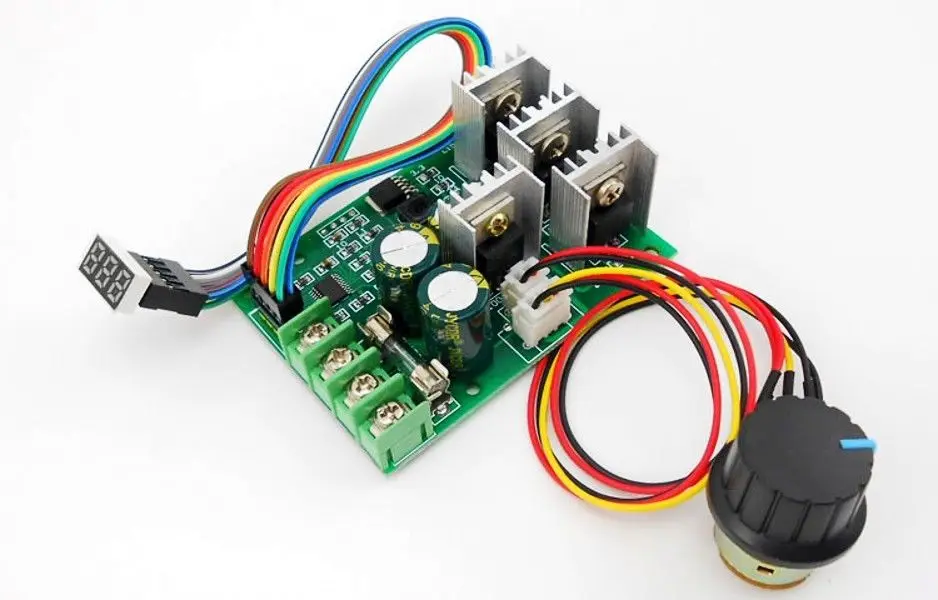
Эта схема предназначена для работы в узком диапазоне ШИМ, максимальный режим работы ШИМ уменьшен за счет задержки индуктивной нагрузки двигателя, а с учетом ограничений схемы Sample & Hold этот метод не следует использовать для широкий диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для реального использования настоятельно рекомендуется улучшить простую схему Sample & Hold. Например, схема на недорогом LF398 может обеспечить время дискретизации 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение противоЭДС (за счет изменения сопротивления обмотки)
Однако также:
- не подходит для двигателей с большой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет тенденцию к колебаниям
Информационный бюллетень
Подпишитесь на получение новых блогов, тематических исследований и ресурсов прямо на ваш почтовый ящик.
