Способы пуска асинхронного двигателя | Техпривод
Асинхронный двигатель уже более 100 лет с успехом применяется в электроприводах различного назначения. За это время для него было придумано множество способов подачи питания и управления. В этой статье мы рассмотрим вопрос пуска двигателя с разных сторон.
Способы подачи напряжения на двигатель
Напряжение питания можно подавать на асинхронный двигатель двумя основными способами – электромеханическим и электронным.
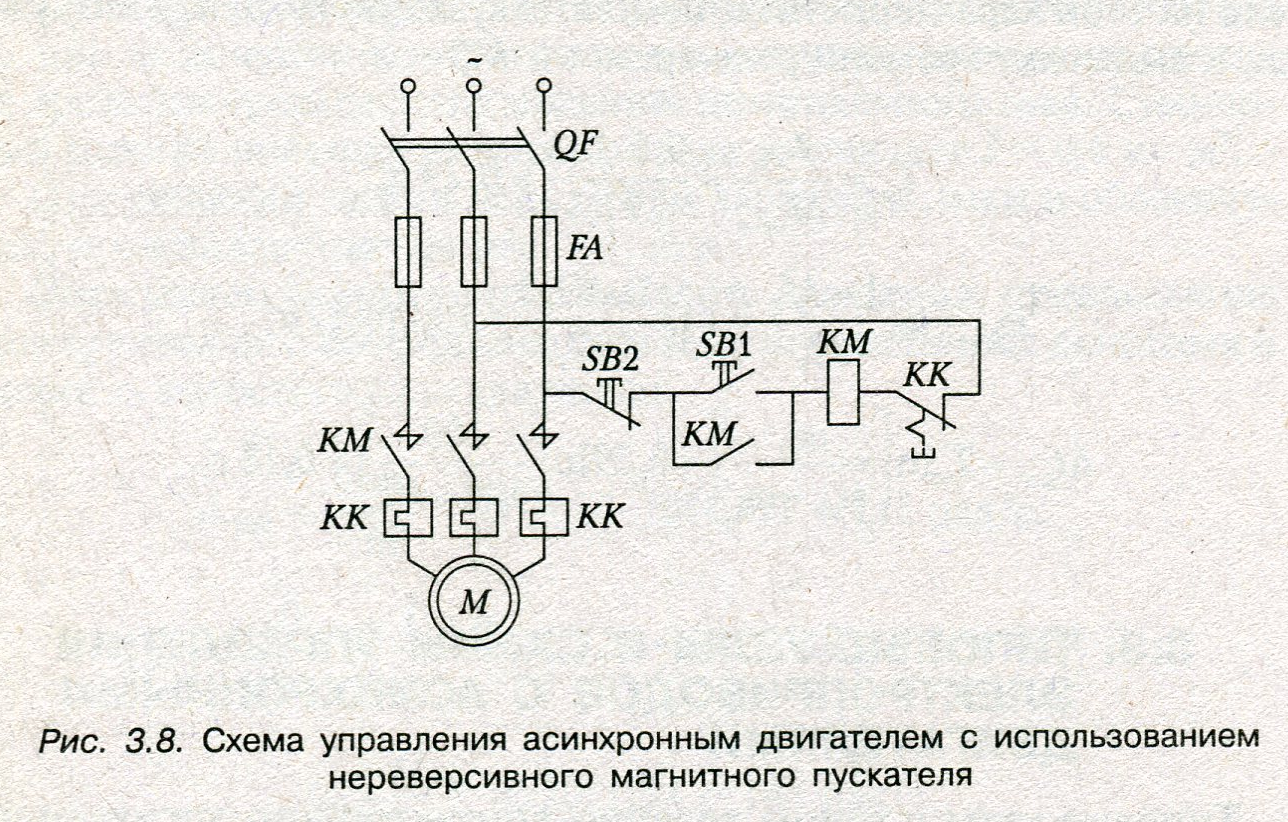
В первом случае используются различные электротехнические устройства коммутации, содержащие подвижные силовые контакты: рубильники, автоматические выключатели, автоматы защиты двигателя (ручные пускатели), контакторы (магнитные пускатели). В подобных устройствах подача питания осуществляется замыканием силовых контактов, через которые проходит рабочий ток двигателя.
Второй способ предполагает запуск двигателя при помощи твердотельных реле или контакторов, софтстартеров, преобразователей частоты. В таких устройствах нет подвижных контактов, а в качестве коммутационных элементов используются полупроводниковые приборы – транзисторы, тиристоры, симисторы.
В таких устройствах нет подвижных контактов, а в качестве коммутационных элементов используются полупроводниковые приборы – транзисторы, тиристоры, симисторы.
Ручное и дистанционное управление
Под ручным управлением понимается такой способ запуска, при котором органы управления и коммутации находятся в составе одного устройства. Типичные примеры – различные рубильники и выключатели, ручные пускатели. В этом случае для подачи напряжения на двигатель необходимо непосредственно воздействовать рукой на устройство коммутации.
Дистанционное управление подразумевает запуск двигателя на любом удалении от устройства коммутации. Для этого, например, может использоваться кнопка «Пуск» на панели шкафа управления, которая включает контактор. Эта же кнопка может быть установлена или продублирована на большом расстоянии от контактора. Более того, вместо кнопки может использоваться выходной контакт контроллера, который выдает команду по программе, либо по сигналу из любой точки мира.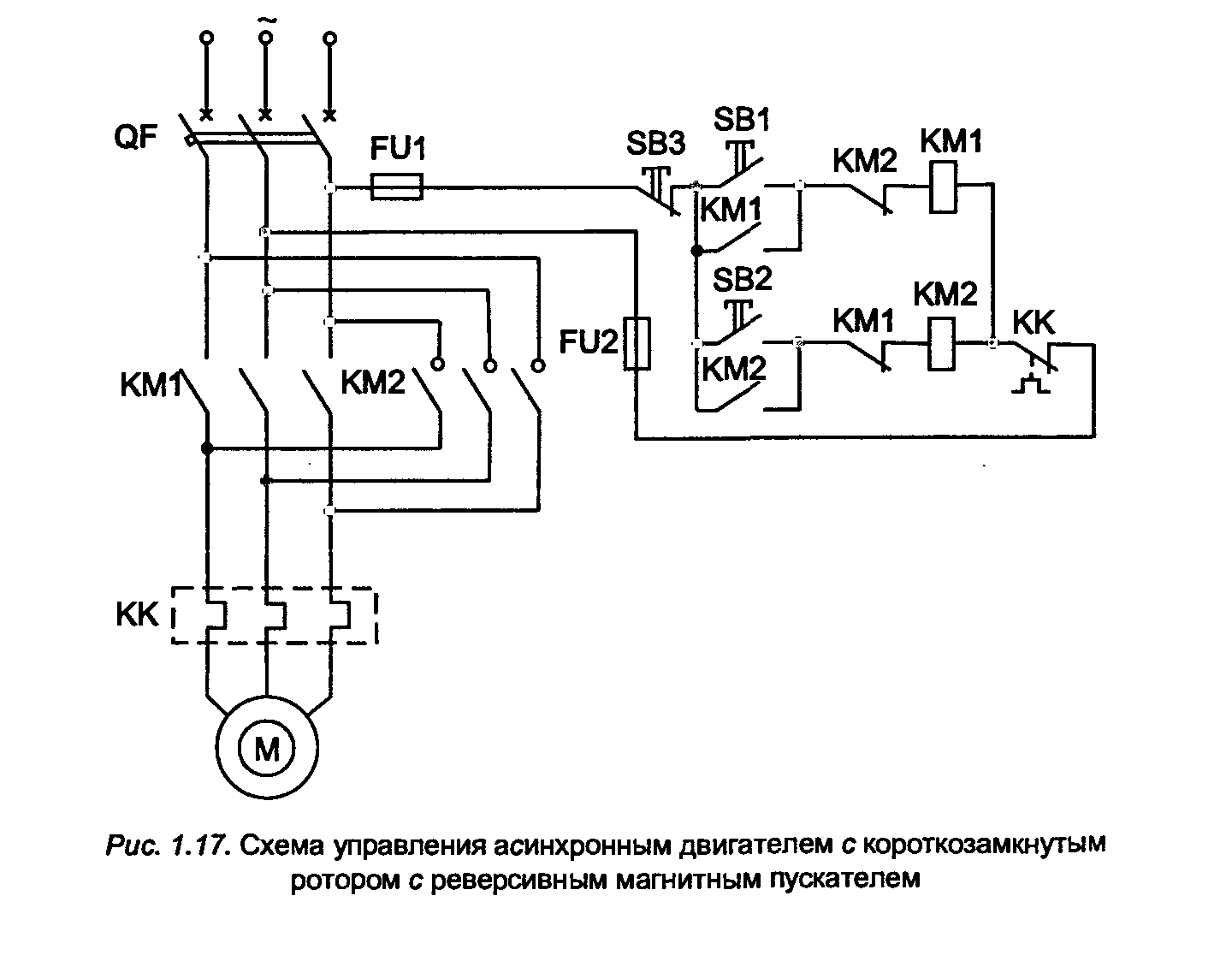
Большинство электронных устройств пуска асинхронного двигателя могут иметь как ручное управление (кнопками на передней панели), так и дистанционное – по проводным или беспроводным каналам управления.
Схемы включения асинхронного двигателя
На практике используются две основные схемы – «Звезда» и «Треугольник». Они различаются конфигурацией включения обмоток двигателя. Выбор схемы зависит от напряжения питания и ряда других факторов.
Схема включения может быть собрана на постоянной основе и обеспечивать пуск и работу двигателя в номинальном режиме через любое из устройств, перечисленных выше. Но иногда возникает необходимость задействовать оба варианта. Такая схема называется «Звезда – Треугольник». Она предполагает специальную схему пуска, при которой разгон двигателя происходит в «Звезде», а при переходе в рабочий режим двигатель включается в «Треугольник».
Виды защит
Некоторые устройства пуска имеют встроенную защиту двигателя. Например, ручные пускатели при соответствующей настройке защитят привод от короткого замыкания и перегрузки, а также от некоторых проблем в питающей сети.
Например, ручные пускатели при соответствующей настройке защитят привод от короткого замыкания и перегрузки, а также от некоторых проблем в питающей сети.
Самый высокий уровень защит обеспечивает преобразователь частоты, например, защиту от превышения момента, от превышения тока, от некорректного уровня напряжения и проч. При наличии термодатчика (позистора), встроенного в двигатель, частотник способен защитить привод от перегрева. Разновидностью защиты можно считать плавный пуск, реализуемый в софтстартерах и преобразователях частоты. В случае плавного разгона в значительной мере устраняются такие явления, как механические и электрические перегрузки, а также нагрев двигателя.
В современном оборудовании при проектировании электросхем пуска часто используют комбинации устройств коммутации и защиты, включенных последовательно. Например, асинхронный двигатель может питаться через включенные последовательно рубильник, автоматический выключатель, автомат защиты и преобразователь частоты.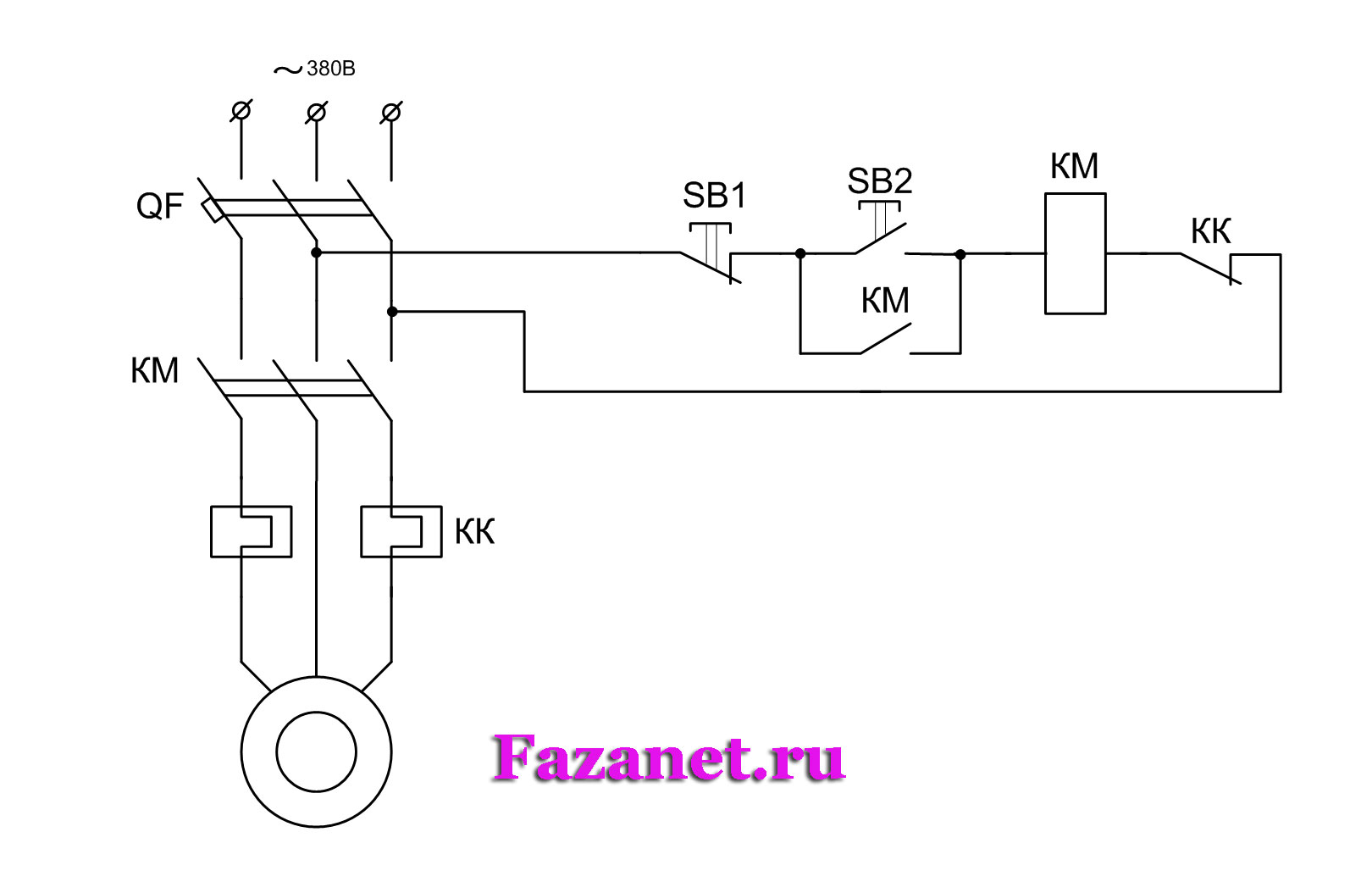
Управление скоростью и направлением вращения
Пуск асинхронного двигателя может осуществляться с изменением номинальной скорости и направления вращения. Обычно для этого применяют преобразователи частоты. Для изменения направления вращения двигателя также используют реверсивные пускатели, которые содержат как минимум два контактора.
Другие полезные материалы:
Каскадное управление насосами
Червячный редуктор: больший момент за меньшие деньги
Эквивалентная схема для асинхронного электродвигателя
Асинхронный двигатель является хорошо известным устройством, которое работает по принципу трансформатора. По этой причине его также называют вращающимся трансформатором. Когда на статор приходит электродвижущая сила, в роторе возникает напряжение, которое является результатом электромагнитной индукции.
Так что асинхронный двигатель является трансформатором с вращающейся вторичной обмоткой. Тут первичная обмотка трансформатора имеет сходство с обмоткой статора асинхронного двигателя, в то время как вторичная обмотка походит на ротор.
Асинхронный электродвигатель всегда работает со скоростью ниже синхронной скорости и ниже скорости полной нагрузки. Относительная разница между синхронной скоростью и скоростью вращения известна как проскальзывание, которое обозначается s.
Где Ns является синхронной скоростью вращения, которая получается за счёт:
Где f является частотой напряжения, которое подаётся.
P является количеством полюсов у устройства.
Эквивалентная схема
Эквивалентная схема любого устройства демонстрирует различные параметры устройства, такие как омические потери, а также иные потери. Потери моделируются всего лишь за счёт индуктора и резистора. Потери меди имеют место быть в обмотках, поэтому принимается во внимание сопротивление обмотки.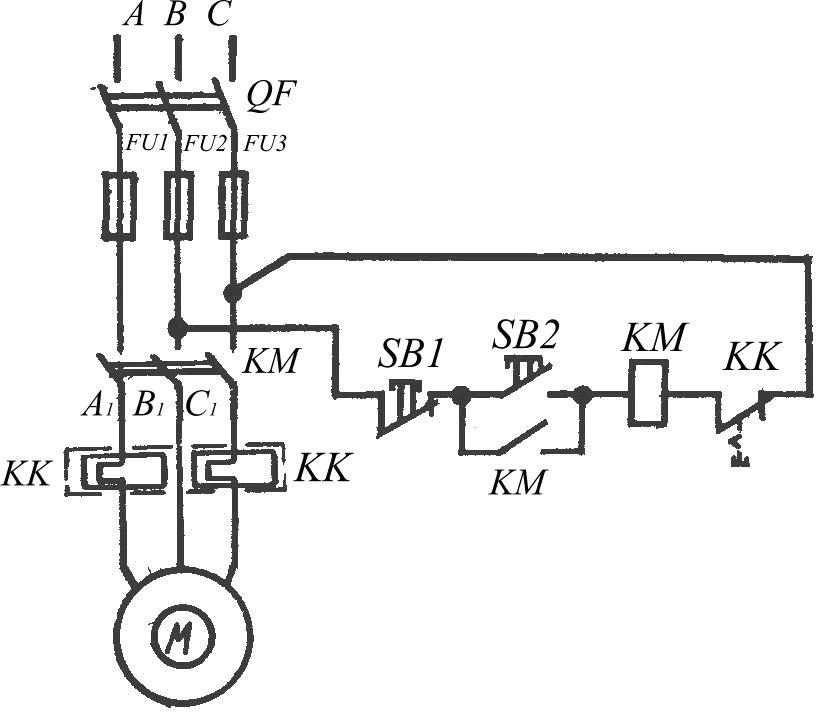
Также обмотка обладает индуктивностью, для которой существует сброс напряжения, за счёт индукционного реактивного сопротивления, а также благодаря такому фактору как коэффициент мощности, который есть на рисунке. Существует два типа эквивалентных схем в случае с трёхфазным асинхронным электродвигателем.
Точная эквивалентная схема
X1 является индуктивностью обмотки статора.
Rc является компонентом потерь сердечника.
XM является намагничивающим реактивном сопротивлением обмотки.
R2/s является энергией ротора, которая включает в себя механическую энергию на выходе и потери меди ротора.
Если мы нарисуем схему, включающую статор, то схема будет выглядеть так:
Здесь все другие параметры одинаковы, за исключением:
R2’ является сопротивлением обмотки ротора, имеющим отношение к обмотке статора.
X2’ является индуктивностью обмотки ротора, имеющим отношение к обмотке статора.
R2(1 – s) / s является сопротивлением, которое показывает энергию, которая преобразуется в механическую энергию на выходе или полезную энергию. Энергия, которая рассеивается в том резисторе, является полезной энергией или энергией вала.
Примерная эквивалентная схема
Такая эквивалентная схема рисуется просто для того, чтобы упростить вычисление за счёт удаления одной вершины. Обходная ветка сдвинута к основной стороне. Это происходит, поскольку сброс напряжения между сопротивлением статора и индуктивностью меньше, и отсутствует большая разница между напряжением, которое подают, и тем напряжением, которое возникает. Как бы там ни было, это не является подходящим вариантом по следующим причинам:
1. Магнитная схема асинхронного электродвигателя имеет воздушный
промежуток, поэтому электрический ток больше по сравнению с
трансформатором, отсюда следует, что стоит применить точную
эквивалентную схему.2. Индуктивность ротора и статора больше в асинхронном двигателе. 3. В асинхронном электродвигателе используются распространенные
обмотки.
Взаимосвязь энергии в эквивалентной схеме
1. Энергия на входе для статора 3 V1I1Cos(Ɵ).
Где V1 – напряжение, применённое к статору.
I1 – ток, вырабатываемый обмоткой статора.
Cos(Ɵ) – энергия статора.
2. Вход ротора.
Вход энергии. Потери меди и железа статора.
3. Потеря меди ротора = Проскальзывание x вход энергии на ротор.
4. Создаваемая энергия = (1 – s) x энергия входа на ротор.
Эквивалентная схема однофазного асинхронного электродвигателя
Существует разница между однофазными и трёхфазными эквивалентными схемами. Схема для однофазного двигателя получается за счёт теории двойного вращающегося поля, которая говорит: Стационарное пульсирующее магнитное поле может быть разделено на два вращающихся поля. Оба они имеют равную магнитуду, однако их направление противоположно.
В большинстве случаев компонентом потерь сердечника r0 пренебрегают, так как это значение довольно небольшое, и сильно не влияет на расчёты.
Здесь Zf показывает переднее полное сопротивление и Zb показывает заднее полное сопротивление.
Также сумма переднего и заднего проскальзывания равняется двум, так что в случае заднего проскальзывания, оно замещается (2 – s).
R1 = Сопротивление обмотки статора.
X1 = Индуктивное реактивное сопротивление обмотки статора.
Xm = Намагничивающее реактивное сопротивление.
R2’ = Реактивное сопротивление ротора, имеющее отношение к статору.
X2’ = Индуктивное реактивное сопротивление ротора, которое имеет отношение к статору.
Расчёт энергии в эквивалентной схеме
1. Найдите Zf и Zb.
2. Найдите ток статора, который обеспечивается напряжением

3. Затем, найдите энергию на входе, которая обеспечивается за счёт:
Напряжения статора x Ток статора x Cos(Ɵ)
Где Ɵ является углом между током и напряжением статора.
4. Создаваемая энергия (Pg) является разницей между энергией переднего
поля и задней энергией. Передняя и задняя энергия получаются за счёт
рассеивания энергии в соответствующих резисторах.
5. Потери меди ротора возникают за счёт:
Проскальзывание x Pg
6. Энергия на выходе возникает за счёт:
Pg – s x Pg потеря вращения.
Потери вращения включают потери трения, потери сопротивления
воздуха, потери сердечника.
7. Эффективность также может быть подсчитана при помощи сильного
увеличения энергии на входе по отношению к энергии на выходе.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Эквивалентная схема асинхронного двигателя — цепь ротора и статора
Эквивалентная схема асинхронного двигателя обеспечивает рабочие характеристики, которые оцениваются для установившихся условий. Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме трансформатора.
Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме трансформатора.
Содержимое:
- Модель цепи статора
- Модель цепи ротора
- Примерная эквивалентная схема асинхронного двигателя
Модель цепи статора
Модель цепи статора асинхронного двигателя состоит из сопротивления обмотки фазы статора R 1 , реактивного сопротивления рассеяния обмотки фазы статора X 1 , как показано на схеме ниже:
Отсутствие нагрузки ток I 0 моделируется чисто индуктивным реактором X 0 с компонентом намагничивания I µ и неиндуктивным резистором R 0 , пропускающим ток потерь в сердечнике I ω . Таким образом,
Полный ток намагничивания I 0 значительно больше в случае асинхронного двигателя по сравнению с трансформатором. Это происходит из-за более высокого сопротивления, вызванного воздушным зазором асинхронного двигателя. Как известно, в трансформаторе ток холостого хода изменяется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет около от 25 до 40 % номинального тока в зависимости от типоразмера двигателя. Величина реактивного сопротивления намагничивания X 0 также очень мала в асинхронном двигателе.
Это происходит из-за более высокого сопротивления, вызванного воздушным зазором асинхронного двигателя. Как известно, в трансформаторе ток холостого хода изменяется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет около от 25 до 40 % номинального тока в зависимости от типоразмера двигателя. Величина реактивного сопротивления намагничивания X 0 также очень мала в асинхронном двигателе.
Модель цепи ротора
Когда на обмотки статора подается трехфазное питание, в обмотках ротора машины индуцируется напряжение. Чем больше будет относительное движение магнитных полей ротора и статора, тем больше будет результирующее напряжение ротора. Наибольшее относительное движение происходит в состоянии покоя. Это состояние также известно как заблокированный ротор или состояние заблокированного ротора. Если индуцированное напряжение ротора в этих условиях равно E 20 , тогда индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже:
Сопротивление ротора постоянно и не зависит от скольжения. Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Если L 2 — индуктивность ротора, реактивное сопротивление ротора определяется уравнением, показанным ниже:
Но, как мы знаем,
Следовательно,
Где X 20 — реактивное сопротивление ротора в состоянии покоя.
Цепь ротора показана ниже:
Полное сопротивление ротора определяется уравнением ниже:
Ток ротора на фазу определяется уравнением, показанным ниже:
Здесь I 2 — частота скольжения ток, создаваемый индуцированным напряжением частоты скольжения sE 20 , действующим в цепи ротора, имеющей импеданс на фазу (R 2 + jsX 20 ).
Теперь, разделив уравнение (5) на скольжение s, получим следующее уравнение:
R 2 – постоянное сопротивление и переменное реактивное сопротивление рассеяния sX 20 . Точно так же схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 Ом/с.
Точно так же схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 Ом/с.
Уравнение (6) выше объясняет вторичную цепь воображаемого трансформатора с постоянным коэффициентом напряжения и с одинаковой частотой обеих сторон. Этот воображаемый неподвижный ротор несет тот же ток, что и реальный вращающийся ротор. Это позволяет передавать импеданс вторичного ротора на сторону первичного статора.
Эквивалентная схема дополнительно упрощается за счет смещения ветвей шунтирующего импеданса R 0 и X 0 на входные клеммы, как показано на схеме ниже:
Примерная схема основана на предположении, что V 1 = Е 1 = Е’ 2 . В приведенной выше схеме единственным компонентом, зависящим от скольжения, является сопротивление. Все остальные величины постоянны. Следующие уравнения могут быть записаны при любом заданном проскальзывании s следующим образом:
Полное сопротивление за пределами AA’ определяется как:
Подставляя значение ZAA’ из уравнения (7) в уравнение (8), мы получаем,
Следовательно,
Ток холостого хода I 0 равен
Полный ток статора определяется уравнением, показанным ниже:
Общие потери в сердечнике определяются уравнением, показанным ниже:
Мощность воздушного зазора на фазу определяется как: Развиваемый крутящий момент определяется уравнением, показанным ниже:
приведенное выше уравнение представляет собой уравнение крутящего момента асинхронного двигателя. Приблизительная модель эквивалентной схемы является стандартом для всех расчетов производительности асинхронного двигателя.
Приблизительная модель эквивалентной схемы является стандартом для всех расчетов производительности асинхронного двигателя.
Что такое эквивалентная схема асинхронного двигателя?
Электрические машиныДвигателиАсинхронный двигатель работает по принципу электромагнитной индукции. Работа асинхронного двигателя аналогична работе трансформатора. Кроме того, эквивалентная схема асинхронного двигателя аналогична эквивалентной схеме трансформатора. Передача энергии в асинхронном двигателе от статора к ротору очень похожа на передачу энергии в трансформаторе от первичной обмотки к вторичной.
Асинхронный двигатель является асинхронным двигателем. И скорость двигателя зависит от состояния нагрузки. С помощью эквивалентной схемы мы можем оценить установившуюся работу двигателя с помощью простого расчета сети, и это позволяет нам найти рабочие характеристики, такие как крутящий момент ротора, потери и КПД двигателя.
Асинхронный двигатель всегда работает со скоростью ниже синхронной. Относительная скорость между синхронной скоростью и фактической скоростью ротора называется скольжением. Уравнение скольжения и синхронной скорости показано в приведенном ниже уравнении.
Относительная скорость между синхронной скоростью и фактической скоростью ротора называется скольжением. Уравнение скольжения и синхронной скорости показано в приведенном ниже уравнении.
Где,
- N с = Синхронная скорость
- N = скорость ротора (фактическая скорость)
Где,
- f = Частота питания
- p = Количество полюсов
Похожие сообщения:
- Эквивалентная схема электрического трансформатора
- Уравнение мощности, напряжения и ЭДС двигателя постоянного тока – формулы
Эквивалентная схема асинхронного двигателя нарисована только для одной фазы.
Содержание
Модель схемы статораМодель статора асинхронного двигателя показана на рисунке ниже.
Статор состоит из обмотки статора и сердечника статора. Потери в обмотке статора представлены сопротивлением статора R 1 , а потери в сердечнике статора представлены реактивным сопротивлением статора X 1 .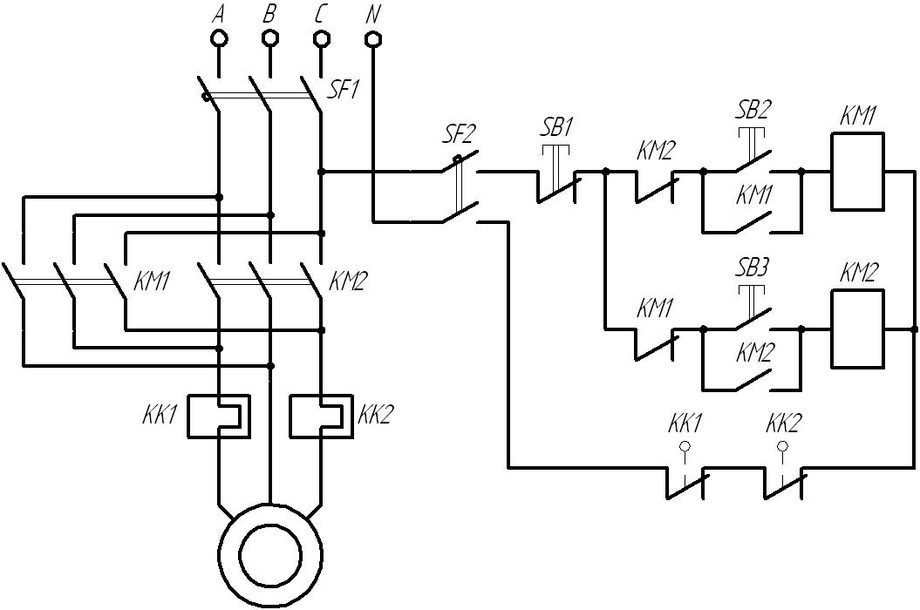 Следовательно, модель цепи статора состоит из сопротивления статора и реактивного сопротивления статора, соединенных последовательно.
Следовательно, модель цепи статора состоит из сопротивления статора и реактивного сопротивления статора, соединенных последовательно.
Ток холостого хода I 0 делится на две части; ток намагничивания I μ и ток потерь в сердечнике I ω .
I 0 = I μ + I ω
Чистое индуктивное сопротивление X 0 несет ток намагничивания I μ и неиндуктивное сопротивление несет ток потерь в сердечнике I ω .
Из-за более высокого сопротивления, вызванного воздушным зазором в случае асинхронного двигателя, общий ток намагничивания больше, чем у трансформатора. В асинхронном двигателе ток холостого хода составляет от 25 до 40 % номинального тока, а в трансформаторе ток холостого хода составляет от 2 до 5 % номинального тока. Ток холостого хода различен для разных размеров и типов двигателей.
Похожие сообщения:
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Когда на обмотку статора подается трехфазное питание, в обмотке ротора индуцируется ЭДС. Напряжение ротора зависит от относительного движения магнитных полей ротора и статора. Наибольшее относительное движение достигается в состоянии покоя. Напряжение ротора, индуцируемое при любом скольжении, определяется выражением;
Напряжение ротора зависит от относительного движения магнитных полей ротора и статора. Наибольшее относительное движение достигается в состоянии покоя. Напряжение ротора, индуцируемое при любом скольжении, определяется выражением;
E 2s = s E 20
Если игнорировать скин-эффект, сопротивление ротора постоянно и не зависит от скольжения. Реактивное сопротивление ротора зависит от частоты ротора и индуктивности. Реактивное сопротивление ротора определяется выражением; где;
- f 2 = частота ротора
- L 2 = индуктивность ротора
Соотношение между частотой питания f 1 и частотой ротора f 2 определяется выражением;
f 2 = s f 1
X 2 = 2 πsf 1 L 2
X 2 = sX 20
Где;
X 20 = реактивное сопротивление ротора при остановке
Принципиальная схема модели цепи ротора показана на рисунке ниже.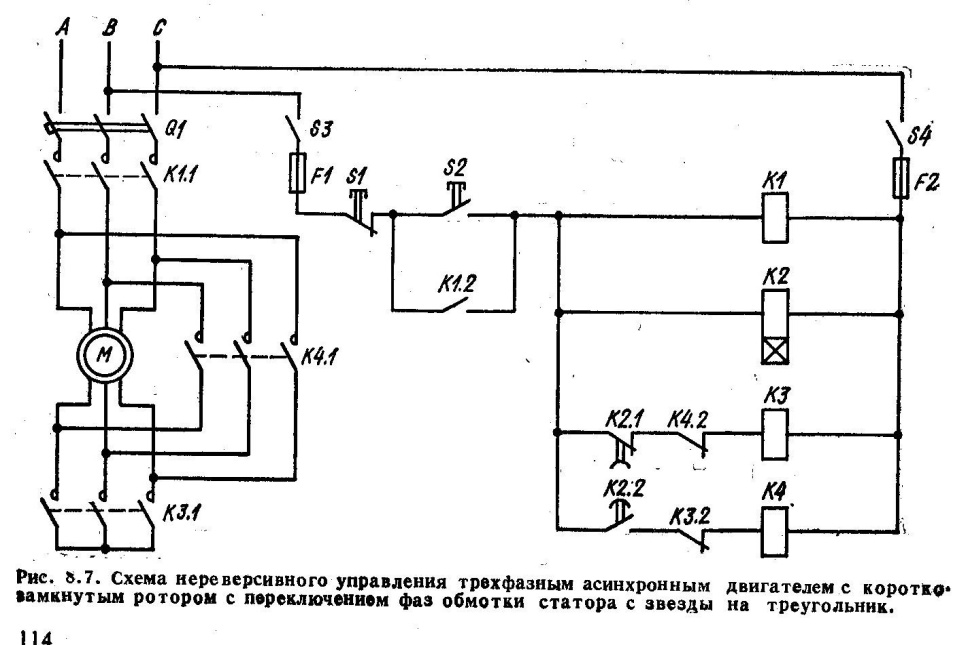
На приведенном выше рисунке полное сопротивление ротора определяется выражением;
Z 2s = R 2 + jX 2s
Z 9015 9 2s = R 2 + jsX 20
Ток ротора равен предоставлено;
Связанный пост:
- Характеристики момента-скольжения и момента-скорости асинхронного двигателя
- Уравнение крутящего момента асинхронного двигателя
Это уравнение представлено цифрой 2 выше. Из этого уравнения видно, что I 2 с представляет собой ток частоты скольжения, создаваемый напряжением частоты скольжения sE 20 и цепью ротора, имеющей импеданс R 2 + jX 2с .
Если мы разделим приведенное выше уравнение на скольжение s, мы получим;
Представление этого уравнения показано на рисунке ниже.
Здесь мы видим, что модуль и фазовый угол I 2 с остаются неизменными при этой модификации. Тогда также есть огромная разница между обоими уравнениями. В уравнении 2 I 2 с создается постоянным напряжением сети E 20 , а сопротивление цепи ротора составляет ( R 2 /s) + jX 20 . Следовательно, I 2 с в уравнении-2 представляет собой ток сетевой частоты, а I 2 с в уравнении-1 представляет собой ток с частотой скольжения.
Также на рис. 2 модель цепи ротора имеет постоянное сопротивление R 2 и переменное реактивное сопротивление рассеяния sX 20 . А на рис-3 модель цепи ротора имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 /с.
Это уравнение описывает подобие вторичной обмотки трансформатора, имеющего постоянное отношение напряжения и одинаковую частоту с обеих сторон. Здесь мы предполагаем стационарный ротор, который несет тот же ток, что и фактический вращающийся ротор, и создает ту же МДС. Этот воображаемый стационарный ротор позволяет передавать импеданс вторичной обмотки (ротора) на первичную (статорную) сторону.
Здесь мы предполагаем стационарный ротор, который несет тот же ток, что и фактический вращающийся ротор, и создает ту же МДС. Этот воображаемый стационарный ротор позволяет передавать импеданс вторичной обмотки (ротора) на первичную (статорную) сторону.
В случае асинхронного двигателя, когда ток и напряжение ротора относятся к стороне статора, их частота также изменяется на частоту статора.
Похожие сообщения:
- Разница между однофазным и трехфазным асинхронным двигателем
- Какова роль конденсатора в двигателях потолочных вентиляторов?
Чтобы получить точную пофазную эквивалентную схему асинхронного двигателя, нам необходимо рассчитать роторную часть модели относительно частоты и уровня напряжения цепи статора. В эквивалентной схеме трансформатора напряжение, ток и импеданс на вторичной стороне передаются на первичную с помощью коэффициента трансформации (а).
Аналогичное преобразование может быть выполнено в случае асинхронного двигателя.
E 2 ‘ = a E 2 = E 1
R 2 ‘ = a 2 R 2
X 20 ‘ = a 2 9051 1 Х 20
Точная эквивалентная схема асинхронного двигателя показана на рисунке ниже.
Эта эквивалентная схема идентична двухобмоточному трансформатору.
Похожие сообщения:
- Символы электродвигателей
- Схемы подключения питания и управления трехфазным двигателем
Подобно трансформатору, в этом случае мы также можем получить приблизительную эквивалентную схему, сдвигая ветви шунтирующего импеданса R 0 и X 0 к входным клеммам.