▶▷▶▷ схема управление асинхронным двигателем микроконтроллером
▶▷▶▷ схема управление асинхронным двигателем микроконтроллером| Интерфейс | Русский/Английский |
| Тип лицензия | Free |
| Кол-во просмотров | 257 |
| Кол-во загрузок | 132 раз |
| Обновление: | 25-03-2019 |
схема управление асинхронным двигателем микроконтроллером — Yahoo Search Results Yahoo Web Search Sign in Mail Go to Mail» data-nosubject=»[No Subject]» data-timestamp=’short’ Help Account Info Yahoo Home Settings Home News Mail Finance Tumblr Weather Sports Messenger Settings Want more to discover? Make Yahoo Your Home Page See breaking news more every time you open your browser Add it now No Thanks Yahoo Search query Web Images Video News Local Answers Shopping Recipes Sports Finance Dictionary More Anytime Past day Past week Past month Anytime Get beautiful photos on every new browser window Download Микроконтроллер, симистор, асинхронный двигатель keklabru/articles/3-2010-10-28-21-52-23/65-triachtml Cached Управление двигателем с помощью манипуляций полуволнами Двигатель: асинхронный , 3 фазы, 250 Ватт, 220 В, 2730 об/мин, тип АИР56В2n3 Фазосдвигающий конденсатор cf = 10мкФ х 400 В Управление Асинхронным Двигателем С Фазным Ротором forumcxemnet/indexphp?/topic/17334 Cached Управление Асинхронным Двигателем С Фазным Ротором Позволит ли такая схема исключать Частотные преобразователи для асинхронных двигателей: принцип fbru/article/191156/chastotnyie-preobrazovateli-dlya-a Cached По сути, для управления асинхронным двигателем нужно иметь возможность регулировки не только скорости вращения, но и времени разгона, торможения Микропроцессорное управление электроприводом » Привет Студент! privetstudentcom/kursovyye/kursovyye-po-elektronike/ Cached 22 Блок – схема алгоритма управления двигателем Блок – схема алгоритма управления двигателем показана на рисунке 21 Рисунок 21 — блок – схема алгоритма управления двигателем микроконтроллер применени микроконтроллер применение zapdocsite/mikrokontroller-primeneni-mikrokont Cached зажигание заз зажигание мотоцикл зажигание на avr зажигание на днепр зажигание на иж планета-4 зажигание на классике зажигание на тулу зажигание оппозитру зажигание схема на ваз зажигания РАЗРАБОТКА РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА ПО СИСТЕМЕ coreacuk/download/pdf/53080978pdf асинхронным двигателем Управление будет происходить, благодаря внешнему воздействию от переменного резистора При помощи АЦП снимаем 44 Микропроцессорные системы управления studfilesnet/preview/6270824/page:32 Cached В настоящее время разрабатывают платы, обеспечивающие управление всеми типичными для данной области техники объектами (рис 49) Рис 49 МПУ управления асинхронным двигателем Электроприводы станков с ЧПУ » Школа для электрика: все об electricalschoolinfo/elprivod/1598-jelektroprivody Cached Рис 3 Типовая структура управления асинхронным двигателем с использованием преобразователя частоты Системы управления электродвигателями на микроконтроллерах wwwchipnewsru/htmlcgi/arhiv/99_01/stat_10htm Cached SimplePOWER — это модульная система управления двигателем , которая объединяет несколько различных блоков, таких как управление двигателем , датчики, управление клапанами, панель управления и тп Микроконтроллеры на основе ядра ARM Cortex M3 wwwcompelru/lib/ne/2008/1/4-mikrokontrolleryi Cached Комплектуется полным набором библиотек по управлению двигателем с использованием датчиков и без них, оценочной аппаратной платформой (реализует векторное управление асинхронным Promotional Results For You Free Download | Mozilla Firefox ® Web Browser wwwmozillaorg Download Firefox — the faster, smarter, easier way to browse the web and all of Yahoo 1 2 3 4 5 Next 441 results Settings Help Suggestions Privacy (Updated) Terms (Updated) Advertise About ads About this page Powered by Bing™
- Асинхронная машина — электрическая машина переменного тока , частота вращения ротора которой не равн
- а (в двигательном режиме меньше) частоте вращения магнитного поля , создаваемого током обмотки статора .
 А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и
А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и - ра .
А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и связь», 2004 4. Управление двухфазным асинхронным двигателем в оптико-механических системах со сканированием.
Векторное управление асинхронными двигателями. Учебное пособие. Скачать бесплатно без регистрации книгу онлайн в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов, школ, педагогов и методистов. Каталог книг постоянно обновляется.
Устройство, принцип действия и свойства асинхронных двигателей. Векторное управление асинхронными двигателями. Принцип действия и взаимодействие с микроконтроллером матрицы клавиатуры. Схемы подключения устройств к микроконтроллеру с использованием биполярного транзистора, электромагнитного …
Особенности архитектуры однокристальных микропроцессоров и микроконтроллеров. Пусковые и тормозные режимы асинхронных двигателей.
 Кроме громкого имени у этой мойки есть скрытая в ее недрах особенность: асинхронный электродвигатель с водяным (!) охлаждением. Сборка аккуратная, трехплунжерный насос в алюминиевом корпусе приводится мощным асинхронным двигателем.
Кроме громкого имени у этой мойки есть скрытая в ее недрах особенность: асинхронный электродвигатель с водяным (!) охлаждением. Сборка аккуратная, трехплунжерный насос в алюминиевом корпусе приводится мощным асинхронным двигателем.
 А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и
А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио инапример
- датчики
- которая объединяет несколько различных блоков
- оценочной аппаратной платформой (реализует векторное управление асинхронным Promotional Results For You Free Download | Mozilla Firefox ® Web Browser wwwmozillaorg Download Firefox — the faster
схема управление асинхронным двигателем микроконтроллером — Поиск в Google Специальные ссылки Перейти к основному контенту Справка по использованию специальных возможностей Оставить отзыв о специальных возможностях Нажмите здесь , если переадресация не будет выполнена в течение нескольких секунд Войти Удалить Пожаловаться на неприемлемые подсказки Режимы поиска Все Картинки Видео Новости Карты Ещё Покупки Книги Авиабилеты Финансы Настройки Настройки поиска Языки (Languages) Включить Безопасный поиск Расширенный поиск Ваши данные в Поиске История Поиск в справке Инструменты Результатов: примерно 113 000 (0,46 сек) Looking for results in English? Change to English Оставить русский Изменить язык Результаты поиска Картинки по запросу схема управление асинхронным двигателем микроконтроллером Другие картинки по запросу «схема управление асинхронным двигателем микроконтроллером» Жалоба отправлена Пожаловаться на картинки Благодарим за замечания Пожаловаться на другую картинку Пожаловаться на содержание картинки Отмена Пожаловаться Все результаты AVR494: Управление асинхронным электродвигателем — GAWru wwwgawru › Применение › Микроконтроллеров › AVR Сохраненная копия Похожие AVR494: Управление асинхронным электродвигателем переменного тока по принципу Основной особенностью, которая делает данный микроконтроллер Рисунок 32 — Блок- схема системы автоматического управления Микроконтроллерная система управления асинхронным radiostoragenet/4437-mikrokontrollernaya-sistema-upravleniya-asinhronnym-trekhfa Сохраненная копия Рейтинг: 4 — 1 голос Числоимпульсный метод управления асинхронным двигателем с частотой напряжения 5 В D3 для питания микроконтроллера и схемы индикации Микроконтроллер и управление асинхронным двигателем — Страница 15 kazusru › › Форумы по электронике › Микроконтроллеры, АЦП, память и тд Сохраненная копия Похожие 4 дек 2008 г — 5 сообщений — 5 авторов Страница 15- Микроконтроллер и управление асинхронным двигателем Микроконтроллеры , АЦП, память и тд Если там стоят только конденсаторы, то, действительно, схема ненадёжная Обычно Управление асинхронным двигателем 10 сообщений 25 нояб 2009 г Динамическое торможение асинхронных 3 сообщения 17 июл 2007 г Схема управления 3-х фазным 3 сообщения 5 дек 2006 г Другие результаты с сайта kazusru Управление асинхронным двигателем с помощью МК — Форум про Сохраненная копия Микроконтроллеры Управление асинхронным двигателем с помощью МК есть готовый мотороловский контроллер, добавить драйвер и шесть ключей, схема элементарная, стоит около 5$: The MC3PHAC is a high-performance Микроконтроллерное управление электроприводом Алексеев КБ radiopartyru/mob-literatura/484-microcontrollernoe-upravlenie-electroprivodom Сохраненная копия 16 июл 2013 г — Рассмотрены вопросы применения микроконтроллеров для управления Управление асинхронным электродвигателем переменного тока по принципу Замкнутые схемы управления электропривода с ДПТ с Микроконтроллерная система управления трехфазным wwwvotshemaru/178-mikrokontrollernaya-sistema-upr-trehfaznym-dvigatelemhtml Сохраненная копия Похожие Трехфазные асинхронные двигатели считаются достаточно схеме используется числоимпульсный метод управления асинхронным двигателем с применен микроконтроллер PIC16F628-20/P работающий на частоте 20 мГц, Системы управления электродвигателями на микроконтроллерах wwwchipnewsru/htmlcgi/arhiv/99_01/stat_10htm Сохраненная копия Похожие автор: R Visinka — Цитируется: 4 — Похожие статьи Микроконтроллеры для управления электродвигателями для простых применений, так как позволяет сократить общее число элементов схемы для управления трехфазным асинхронным двигателем в замкнутой системе Работа с трехфазным синхронным двигателем / Хабр — Habr Сохраненная копия 14 сент 2011 г — Ну и тк это трехфазный двигатель, то должно быть 3 Программа разрабатывалась для микроконтроллера PIC17 с Помнится я делал в институте диплом по тиристорному управлению асинхронным двигателем собрал драйвер на мощных полевиках, перепроверил схему 10 раз, Управление электроприводом на микроконтроллере homelabatua/publ/ehlektroonika/upravlenie_ehlektroprivodom_na/4-1-0-16 Сохраненная копия Похожие 3 июл 2014 г — В основном, предлагаемая схема предназначена для управления трехфазным асинхронным двигателем , когда в распоряжении 1 АМПЛИТУДНО-ЧАСТОТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ wwwbpecru/wp-content/uploads/2016/06/Асинхронный-двигатель-2012pdf Похожие задачи управления трехфазным асинхронным двигателем (инвертора) на Функциональная схема сопряжения микроконтроллера ATmega128 с Частотник на ардуино Arduino и асинхронные двигатели chistotnikru/chastotnik-na-arduinohtml Сохраненная копия Похожие 11 дек 2016 г — Управление оборотами однофазного асинхронного двигателя с помощью Arduino частного преобразователя на микроконтроллере Arduino Начнем с определения того, что вы хотите по вашей схеме сделать Разработка и исследование регулируемого асинхронного mastersdonntuorg/2017/etf/chernyavskiy/library/article9htm Сохраненная копия Приведено описание разработки платы управления асинхронным двигателем с таких как: неполное управление , использование схем принудительной только на задачи электропривода микроконтроллеров , которые имеют Микроконтроллерное управление асинхронным двигателем carscomfortru//mikrokontrollernoe-upravlenie-asinhronnym-dvigatelemhtml Сохраненная копия Рассмотрены вопросы применения микроконтроллеров для управления Управление асинхронным электродвигателем переменного тока по принципу Замкнутые схемы управления электропривода с ДПТ с использованием #Реверс Асинхронного Двигателя на Микроконтроллере часть 1 ▶ 21:35 10 авг 2018 г — Добавлено пользователем Mbs Electronics Реверс Однофазного Конденсаторного двигателя Часть 1 Цифровое устройство управления асинхронным двигателем на 220 Вольт [PDF] Система управления электроприводом с микроконтроллером автор: СВ Замулко — 2016 — Похожие статьи Целью данной работы является применение микроконтроллера Рисунок 1 — Функциональная схема системы векторного управления положением АД положением в системе управления асинхронным электродвигателем с Engioru|STM32 Управляем асинхронным двигателем с помощью engioru//upravlyaem-asinxronnyim-dvigatelem-s-pomoshhyu-mikrokontrollera-st Сохраненная копия Управляем асинхронным двигателем с помощью микроконтроллера В итоге появляется такая схема управления : Входы F и R используются для [PDF] 3 моделирование алгоритма управления преобразователем fetmagmrsuru/2012-1/pdf/Volkov%20Baikov%20Germanpdf Сохраненная копия Похожие Векторное управление электроприводом с асинхронным двигателем Схему можно разделить на две части: силовую часть и систему структуру прерываний для всех Cortex- микроконтроллеров и способы их обработки КВВП микроконтроллер и управление асинхронным двигателем схема wwwheliosbiohu//mikrokontroller-i-upravlenie-asinkhronnym-dvigatelem-skhema Сохраненная копия 2 дня назад — микроконтроллер и управление асинхронным двигателем схема — Yahoo Search Results Yahoo Web Search Sign in Mail Go to Mail» Преобразователь частоты для асинхронного – схема — RadioRadar wwwradioradarnet/radiofan//frequency_converter_asynchronous_circuithtml Сохраненная копия 6 февр 2018 г — Преобразователь частоты — асинхронный двигатель , Есть несколько способов управления асинхронным двигателем , и один из них Еще один вариант с готовой прошивкой для микроконтроллера Схема [PDF] Моделирование системы векторного управления асинхронным Сохраненная копия автор: ДА Даденков — 2014 — Цитируется: 8 — Похожие статьи ления перед непосредственной реализацией на микроконтроллере Полученные в Качество векторного управления асинхронным двигателем ( АД) зависит во Структурная схема системы векторного управления , выбранная [PDF] Векторное управление wwwenergysavecomru/download/vektorn_upravpdf Сохраненная копия Похожие преобразователей частоты доля частотно-регулируемых асинхронных микроконтроллеры для управления двигателями (из серии Motor Control) Рис 3 Структурная схема привода переменного тока с векторным управлением Микроконтроллер, симистор, асинхронный двигатель wwwkeklabru/articles/3-2010-10-28-21-52-23/65-triachtml Сохраненная копия Похожие 28 окт 2012 г — Двигатель , достаточно капризный элемент и не всякий подходит для данной схемы И более того, режим плавного управления Устройства управления электродвигателями на платформе wwwtrudymairu//logicheskie-avtomaty-upravleniya-elektrodvigatelyami-na-platform автор: БН Попов — Цитируется: 2 — Похожие статьи качестве примера рассмотрен автомат для управления асинхронными двухфазными двигателя — ми, реализованный Рис1 Блок- схема автономного цифрового следящего привода На рис1 СМК – специализированный микроконтроллер ; фазными бесконтактными двигателями постоянного тока Код реверс однофазного двигателя с конденсатором и пульт ДУ Сохраненная копия Реверс однофазного конденсаторного двигателя с пультом ДУ Цифровая схема реверса однофазного асинхронного двигателя на Применение микроконтроллера позволило реализовать управление двигателем всего двумя Готовые решения на основе микроконтроллеров STM32 — Компэл › Новости Электроники › 2008 › №13 Сохраненная копия Микроконтроллеры STM32 в устройствах управления как синхронный двигатель на постоянных магнитах (СДПМ) и асинхронный Функциональная схема устройства векторного управления электродвигателем на основе МК [PDF] Untitled — ИГЭУ ispuru/files/Tom4pdf электроприводы, построенные по схеме преобразователь частоты – асинхронный векторная система управления асинхронным двигателем работает микроконтроллера Atmega семейства AVR с открытой архитектурой и Схема управления двигателем Электрические схемы управления Сохраненная копия Транзисторное управление двигателями в схемах на микроконтроллере Схема управления асинхронным двигателем при помощи реверсивного Частотный привод 5-200Гц (10-400Гц) своими руками cxemnet › Промышленная электроника Сохраненная копия Похожие 4 окт 2015 г — Изначально МК ( микроконтроллер ) является настроенным на работу с В этом управлении есть одно Но Если в процессе вращения двигателя менять задание маштабирования напряжения DC звена 1в -100в (на схеме R30) Интересует преобразователь однофазного асинхронного [PDF] выпускная квалификационная работа магистра — библиотека ЛЭТИ libraryeltechru/files//2018%20ВКР%20240335%20Лукошников%20П%20Иpdf Сохраненная копия 15 мая 2018 г — УПРАВЛЕНИЕ , МИКРОКОНТРОЛЛЕР , АСИНХРОННЫЙ ДВИГАТЕЛЬ Цель работы – создание модуля и алгоритма управления преобразователя 2 Структурная и функциональная схема преобразователя [PDF] выпускная квалификационная работа магистерская диссертация elibspbsturu/dl/2/v17-2575pdf/download Сохраненная копия программированию современных микроконтроллеров и построения систем Разработана функциональная схема лабораторного стенда, управления асинхронным двигателем все большее распространение стали получать Микроконтроллер, симистор, асинхронный двигатель — Форум РадиоЛоцман Сохраненная копия 2 нояб 2012 г — Описан практический опыт реализации управления трехфазным двигателем Представлены схемы , проект в AVR — Studio, библиотека Модуль управления электроприводом на микроконтроллере wwwchipinforu/literature/chipnews/199906/20html Сохраненная копия Похожие В основном, предлагаемая схема предназначена для управления трехфазными асинхронными двигателями , когда в распоряжении имеется [PDF] Специализированный микроконтроллер ао «пкк миландр» для Сохраненная копия циализированном микроконтроллере для управления электроприводом, разработанном в АО ная схема векторного управления асин- хронным двигателем Рис 4 Система векторного регулирования асинхронного двигателя Принципы автоматики и микроконтроллера как измерительного Сохраненная копия 28 нояб 2016 г — Приведена функциональная схема системы управления работой шаговых двигателей , приведена структурная схема системы управления для векторного управления асинхронными электродвигателями и [PDF] «Разработка систем векторного управления асинхронными motorcontrolru/wp-content/uploads/2015/11/Chuev_vector_controlpdf Похожие автор: ВФ КОЗАЧЕНКО — 2002 — Похожие статьи Обзор существующих микроконтроллеров для управления двигателями средств для систем векторного управления асинхронным двигателем на базе управления производится на основании схемы замещения АД для Разработка принципиальной схемы :: Проектирование модуля wwwgenerallytechru/gentecs-547-1html Сохраненная копия Для реализации устройства был выбран микроконтроллер ATmega независимых счётных выходов необходимые для управления шестью силовыми Функциональная схема электропривода — StudFiles :2/ Сохраненная копия 2 мая 2014 г — Управление асинхронным двигателем предполагает регулирование является микроконтроллер , выполняющий функции управления Самодельный контроллер полноприводный — стр 2 — Микроэлектроника › › Самодельный контроллер полноприводный Сохраненная копия AVR494: Управление асинхронным электродвигателем переменного тока по Вы протеусом пользуетесь для виртуальной отладки кода в схеме ? микроконтроллер для синусного управления двигателем, который стоит в моем Разработка модуля управления трехфазным асинхронным e-notabeneru/elektronika/article_28421html Сохраненная копия Разработка модуля управления трехфазным асинхронным двигателем с асинхронный двигатель , автономное питание, микроконтроллер , печатная плата, При этом независимо от схемы управления , формирующей логику Инвертор для асинхронного двигателя » Форум сайта PicRKnigaru picrknigaru/forum/topic_7 Сохраненная копия 20 сент 2012 г — Инвертор для асинхронного двигателя : Хотя сегодня для управления схема инвертора Тактовая частота микроконтроллера задана [PDF] системы управления автоматизированным электроприводом elprivodnmuorgua//makarov_a_m_sergeev_a_s_krylov_e_g_serdobintsev_yu_p_sis автор: АМ МАКАРОВ — Цитируется: 7 — Похожие статьи ны способы управления асинхронным электродвигателем Раскрываются неко- Схема управления асинхронным двигателем в функции времени 53) является специализированный микроконтроллер или цифровой [PDF] моделирование микропроцессорного устройства контроля Сохраненная копия автор: АП Попов — 2018 — Цитируется: 2 — Похожие статьи ВРАЩАЮЩЕГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ АП ПОПОВ ( Омский составить схему обеспечения работы микроконтроллера ; управление работой периферийных устройств, таких как блок внешних прерываний, ARV Research — Простая схема управления трехфазным arvradioligacom › Проекты › По группам › Микроконтроллеры Сохраненная копия Похожие 4 окт 2007 г — Частотно-управляемый (или регулируемый) асинхронный привод (далее напряжения — приводимый асинхронный двигатель (далее — АД)» Разработка схемы управления инвертором с полным набором функций В схеме используется недорогой микроконтроллер AT89C2051-24PI Разработка системы управления асинхронным двигателем на Сохраненная копия 9 апр 2012 г — Разработка системы управления асинхронным двигателем на базе однокристального микроконтроллера , Функциональная схема управления асинхронным двигателем с короткозамкнутым ротором Принцип Микроконтроллерное управление электроприводом: учеб пособие : [для Кир Борисович Алексеев — 2008 18 15 Требования к микроконтроллеру в зависимости от круга решаемых задач Схема включения асинхронного двигателя 41 232 Вариатор скорости вращения асинхронного двигателя — курсовая cinrefru/razdel/02200informatika/05/115456htm Сохраненная копия Регулирование скорости вращения асинхронных двигателей Разработка структурной и функциональной схемы двигателя Однокристальный микроконтроллер (ОМК) – микро-ЭВМ, включающая в себя все устройства, необходимые для возможность управления при максимальной скорости; • низкая реализация векторного управления асинхронным websnaukaru/issues/2014/04/33144 Сохраненная копия Похожие Векторное управление асинхронными двигателями — в настоящий момент Схема задействованных выводов микроконтроллера и их подключение Частотный преобразователь — Инженерные решения engineering-solutionsru/motorcontrol/vfd/ Сохраненная копия Похожие способен управлять скоростью и моментом асинхронных и/или синхронных двигателей На микроконтроллере частотного преобразователя выполняется Основные методы управления бесщеточными двигателями , Каждая схема силового преобразователя и каждое приложение должны быть Блоки формирования импульсных сигналов C16x/ST10x — Каскод wwwkaskodru/article/c16xst10x/ Сохраненная копия Проектирование распределенных систем управления В состав микроконтроллера C167 входит 2 блока обработки и формирования импульсных 9 приведена схема управления 2-фазными двигателями серии ДБМ, на рис 10 — схема управления 3-фазными синхронными и асинхронными двигателями Вместе с схема управление асинхронным двигателем микроконтроллером часто ищут частотное управление асинхронным двигателем с помощью микроконтроллера управление трехфазным асинхронным двигателем управление электродвигателем с помощью микроконтроллера управление асинхронным двигателем с помощью ардуино управление трехфазным двигателем микроконтроллером управление однофазным асинхронным двигателем драйвер управления асинхронным двигателем stm32 управление асинхронным двигателем Навигация по страницам 1 2 3 4 5 Следующая Ссылки в нижнем колонтитуле Россия — Подробнее… Справка Отправить отзыв Конфиденциальность Условия Аккаунт Поиск Карты YouTube Play Новости Почта Контакты Диск Календарь Google+ Переводчик Фото Ещё Покупки Документы Blogger Hangouts Google Keep Jamboard Подборки Другие сервисы Google
Асинхронная машина — электрическая машина переменного тока , частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля , создаваемого током обмотки статора . А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и связь», 2004 4. Управление двухфазным асинхронным двигателем в оптико-механических системах со сканированием.
Векторное управление асинхронными двигателями. Учебное пособие. Скачать бесплатно без регистрации книгу онлайн в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов, школ, педагогов и методистов. Каталог книг постоянно обновляется.
Устройство, принцип действия и свойства асинхронных двигателей. Векторное управление асинхронными двигателями. Принцип действия и взаимодействие с микроконтроллером матрицы клавиатуры. Схемы подключения устройств к микроконтроллеру с использованием биполярного транзистора, электромагнитного …
Особенности архитектуры однокристальных микропроцессоров и микроконтроллеров. Пусковые и тормозные режимы асинхронных двигателей. Усилитель на биполярном транзисторе: схема с общим эмиттером.
Производство электротехнической продукции, систем и услуг для обеспечения качества, распределения и управления электропитанием, передачи электроэнергии, осветительных приборов и коммутационных устройств.
А.Ю. Кузьминов «Интерфейс RS232 связь между компьютером и микроконтроллером» Москва, «Радио и связь», 2004 4. Управление двухфазным асинхронным двигателем в оптико-механических системах со сканированием.
Векторное управление асинхронными двигателями. Учебное пособие. Скачать бесплатно без регистрации книгу онлайн в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов, школ, педагогов и методистов. Каталог книг постоянно обновляется.
Устройство, принцип действия и свойства асинхронных двигателей. Векторное управление асинхронными двигателями. Принцип действия и взаимодействие с микроконтроллером матрицы клавиатуры. Схемы подключения устройств к микроконтроллеру с использованием биполярного транзистора, электромагнитного …
Особенности архитектуры однокристальных микропроцессоров и микроконтроллеров. Пусковые и тормозные режимы асинхронных двигателей. Усилитель на биполярном транзисторе: схема с общим эмиттером.
Производство электротехнической продукции, систем и услуг для обеспечения качества, распределения и управления электропитанием, передачи электроэнергии, осветительных приборов и коммутационных устройств. Продукты и решения, область применения.
Изучение программирования и подключения измерительных микроконтроллеров ТРМ-202. Изучение и подключение модуля по частотному управлению асинхронным двигателем на стенде. Сборка схем и изучение технологических процессов по автоматизированному управлению различных параметров.
Разработка схемы устройства quot;Цифровой осциллографquot; с использованием микроконтроллеров Особенности проектирования микропроцессорного устройства quot;Цифровой осциллографquot;. Выбор микроконтроллера, описание периферийных устройств. Разработка микропроцессорной системы на базе микроконтроллера для спортивного …
У меня, например, был случай, когда в устройстве пришлось заменять микроконтроллер 4 раза из-за криворуких “программистов”! Скалярный частотник для однофазного асинхронного двигателя 1.
Кроме громкого имени у этой мойки есть скрытая в ее недрах особенность: асинхронный электродвигатель с водяным (!) охлаждением. Сборка аккуратная, трехплунжерный насос в алюминиевом корпусе приводится мощным асинхронным двигателем.
Продукты и решения, область применения.
Изучение программирования и подключения измерительных микроконтроллеров ТРМ-202. Изучение и подключение модуля по частотному управлению асинхронным двигателем на стенде. Сборка схем и изучение технологических процессов по автоматизированному управлению различных параметров.
Разработка схемы устройства quot;Цифровой осциллографquot; с использованием микроконтроллеров Особенности проектирования микропроцессорного устройства quot;Цифровой осциллографquot;. Выбор микроконтроллера, описание периферийных устройств. Разработка микропроцессорной системы на базе микроконтроллера для спортивного …
У меня, например, был случай, когда в устройстве пришлось заменять микроконтроллер 4 раза из-за криворуких “программистов”! Скалярный частотник для однофазного асинхронного двигателя 1.
Кроме громкого имени у этой мойки есть скрытая в ее недрах особенность: асинхронный электродвигатель с водяным (!) охлаждением. Сборка аккуратная, трехплунжерный насос в алюминиевом корпусе приводится мощным асинхронным двигателем.
Открытый проект частотного преобразователя для управления электродвигателями / Хабр
Цель проекта
Сделать компактный, встраиваемый и недорогой частотный преобразователь с питанием от однофазной сети 230-240 В 50Гц, способный управлять асинхронными 220 В 3-х фазными двигателями 1..2 кВт, для плавного разгона и остановки и поддержания частоты вращения от 0 до 1500 об. в мин. Связь с устройством через полевую шину CAN или RS485.
Решиться делать свой ЧП непросто, потому что есть масса готовых на любой вкус. Своя мелкосерийная разработка по цене будет неконкурентной. Однако если в ЧП перенести часть функциональности конечного агрегата помимо управления мотором, то можно удешевить аппаратную обвязку вокруг ЧП и экономически оправдать его создание.
Поиск интегрированных решений
В сети есть открытые проекты и отладочные платы частотных преобразователей с полной документацией и неплохо документированным софтом. Остаются неясными только вопросы оптимальности архитектуры, альтернативной компонентной базы, безопасности, электромагнитной эмиссии, надежности и прочая мелочь вроде диагностики, зазоров, клем, ремонтопригодности. .. Словом вопросов остается много.
.. Словом вопросов остается много.
Мы начали с покупки, казалось бы, солидного решения от фирмы Microchip. Коллеги по соседству тоже делали ЧП на Microchip, и я подумал что это то что нужно. Да, там еще был и корректор мощности.
Эта плата сгорела после первого же подключения реального 1 кВт AC мотора. Изучив трассировку плат, стало понятно, что не сгореть это не могло. Вспыхнула пара дорожек под процессорным модулем. Что-то не рассчитали с их шириной. От решений Microchip сразу отказались и больше не возвращались. Все-таки нишевые микроконтроллерные архитектуры — это не наше. А тут еще такой фейл.
Были еще рассмотрены решения от ST, TI, NXP(Freescale), Infineon. Все хотят привязать разработчика к своим семействам микроконтроллеров. Используют для этого все средства — от лицензионных соглашений, до закрытых библиотек и программных инструментов. Этот мир вдруг показался неуютным.
Изучение других ЧП
Так как наборы разработчика от производителей чипов перестали вызывать доверие, то вторым шагом было посмотреть, как сделаны промышленные ЧП. Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
HANNING ELEKTRO-WERKE GmbH & Co. KG.
Это изделия, относящиеся к классу встраиваемых. Имеют пассивное охлаждение, т. е. в них отсутствуют вентиляторы. Лишены всяких элементов ручного управления и индикации, поскольку ставятся в труднодоступных местах. Предполагается подключение к неким внешним панелям управления через интерфейс RS485. Теоретически должны быть идеально согласованы с управляемыми ими моторами.
Правда опыт эксплуатации несколько испортил впечатление. Несмотря на наличие усиленных EMI фильтров и специализированных микроконтроллеров несколько таких преобразователей у нас сгорело просто потому, что заклинивало редукторы у моторов. Ниже показаны снимки внутренности одного из ЧП данной серии.
OMRON 3G3MX2-A4040-E.
Это ЧП общего применения c 3-фазным входом. Очень многофункциональный. Настолько, что одних только регулируемых параметров в нем около 700. Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.
Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.
Преобразователь OMRON не имеет корректора мощности, но в случае необходимости дополнительного подавления пульсация тока в разрыв DC шины можно подключить внешний мощный дроссель. Также нет стартового реле с ограничителем тока при подаче напряжения, эту роль скорее всего выполняет твердотельный ключ с резистором 13 Ом. Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
Invertek OPTIDRIVE P2
Частотный преобразователь OPTIDRIVE P2 очень технологично скомпонован и послужил образцом для нашего проекта. Выполнен также на двух микроконтроллерах, но до второго добраться не удалось. В качестве силового элемента использована сборка SPM 45 Series от фирмы FAIRCHILD.
Еще изучались преобразователи Lenze SMVector (выполнен на MC9S12E128, 16 bit, 128 KB Flash, 8 KB RAM, 50 MHz и MC68H0908, 8 bit, 32 KB Flash, 512 B RAM, 8 MHz)
Shenzhen INVT Electric Goodrive20-EU
И наконец на самом пике дефицита пришлось изучить преобразователь, разработанный в Китае — Goodrive20-EU. Надо признать, что Goodrive20 явился примером экономии на всем: меньший чем у остальных размер радиатора, меньшая емкость конденсаторов, всего один микроконтроллер, отсутствие ЭМИ-фильтра, лаконичная документация, сравнительно бедный набор регулируемых параметров.
И тем не менее он работал не хуже чем Omron MX2 в некоторых применениях, хотя и с нюансами в способе управления. В частности, долго инициализируется после подачи питания.
Обобщенная структурная схема ЧП
В результате сформировалось представление об обобщенной архитектуре ЧП.
Во-первых, во всех исследованных ЧП применяются интегрированные IGBT модули. На дискретных транзисторах изделий не попадалось. Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Интерфейсная часть ЧП гальванически развязана от силовой части. Силовая часть находится под управлением микроконтроллера с архитектурой DSP или RISC. Микроконтроллеры при этом не самые быстрые по современным меркам, не более 80 МГц. Интерфейсная часть может содержать, а может и не содержать отдельного микроконтроллера. Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.
В результате анализа было решено для своего ЧП использовать один микроконтроллер, но более производительный. Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Конструкция ЧП
Поскольку ЧП встраиваемый, то он не нуждается в специальном корпусе. Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
ЧП состоит из трех основных плат:
Управляющая плата с микроконтроллером и внешними интерфейсами.

Плата DC шины, на которой расположен блок питания и блок конденсаторов
Силовая плата, на которой расположен IGBT модуль, силовые входы и выходы, измерители тока, EMI фильтр.
Компоненты ЧП
Управляющая плата
На управляющей плате находится микроконтроллер и гальвано изолированные внешние интерфейсы:
интерфейс для подключения внешнего квадратурного энкодера
интерфейс RS232
интерфейс CAN
интерфейс USB
три дискретных выхода и один дискретный вход
Управляющая плата соединяется с силовой платой двумя плоскими шлейфами через разъемы X7 и X8. Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.
Кроме того, на управляющей плате находится литиевый аккумулятор для поддержания энергонезависимой работы часов реального времени, держатель для uSD карты и зуммер. Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Плата DC шины
DC шина находится под напряжением 310…340 В и через нее проходит средний ток до 10А на максимальной мощности. На плате размещен блок питания в виде отдельного модуля. Так решено было сделать питание просто ради упрощения дизайна платы. На плате находится транзисторный ключ Q3 управляющий вентиляторами. Вентиляторы включаются только при достижении IGBT модулем определенной заданной температуры.
Плата DC шины и питанияСиловая плата
Главным элементом всего устройства является IGBT модуль.
IGBT модульВ нашем случае использован модуль FSBB30CH60C. Модуль порадовал своей исключительной надежностью. В течении разработки не сгорел ни один модуль. Некоторое время назад это был самый доступный и недорогой модуль. Модуль управляется напрямую логическими сигналами и имеет встроенные защиты от недонапряжения и короткого замыкания.
Плата термосенсораНемного усложняет дело отсутствие температурного сенсора, встроенного в модуль. Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Измерение токов на трех выходах IGBT модуля сделано иначе чем в обычных ЧП. Вместо шунтов поставлены гальвано изолированные датчики Холла ACS759LCB-050B-PFF-T. Это более дорогое решение, но позволяющее более креативно подойти к выбору способов модуляции и упростить трассировку. Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций. Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.
Схема силовой платыСиловая плата с IGBT модулем, выпрямителем, ЭМИ фильтром и проч .Программное обеспечение
Фирмаваре ЧП состоит из двух частей: начального загрузчика и основного приложения.
Начальный загрузчик находится в директории Firmware/Inverter_bootloader и позволяет загружать основное приложение через CAN и через интерфейс RS232. Бинарный образ приложения создается утилитой BIB. Утилита находится в директории Firmware/Loader.
Помимо прочего образ может быть утилитой зашифрован. Загрузчик умеет расшифровывать образы.
Сам проект рабочего приложения находится в директории Firmware/Inverter_firmware. Компилируются проекты в среде EWARM, версии не выше 670.3
Представленное программное обеспечение расчитано на очень простое подключение ЧП.
Схема подключения ЧПЧП управляется по шине CAN в режиме скалярного управления.
Почему скалярного? Скалярное управление несмотря на все недостатки при этом характеризуется более низким уровнем шума издаваемым мотором, по крайней мере, когда имеем дело с ЧП, описанными выше и безсенсорным управлением. При стабильной нагрузке и номинальной скорости двигателя в основном рабочем цикле скалярное управление хорошо себя показывает.
Принято считать («Practical Variable Speed Drives and Power Electronics», Malcolm Barnes 2003 ) что безсенсорное скалярное управление обеспечивает точность скорости в 1% и время отклика момента 100 мс, а векторное безсенсорное соответственно 0.5% и 10 мс.
Результаты качества потребления энергии частотным преобразователем на разных мощностях при частоте модуляции 16 КГц:
Используемы в таблице обозначения:
V(V) – текущее действующее входное напряжение однофазной сети в вольтах
THD V(%) – total harmonic distortion, Коэффициент нелинейных искажений по напряжению
I(A) – действующее значение тока в амперах
THD I(%) – total harmonic distortion, Коэффициент нелинейных искажений по току
I peak (A) – пиковое значение тока в амперах
CF I (A) – Коэффициент амплитуды сигнала (крест-фактор) в амперах
|P| (W) – Активная потребляемая мощность в ваттах
Q (Var) – Реактивная потребляемая мощность.
 Единица измерения – вар
Единица измерения – варS (VA) – Полная потребляемая мощность. Единица измерения ВА
PF — Коэффициент мощности
COS PHI – косинус фи
Несколько слов о безопасности
Сначала о сохранности самого преобразователя. Всегда надо помнить о такой вещи как реформинг. Может случиться так что высоковольтные электролитические конденсаторы, установленные в ЧП где-то долго хранились, или сам ЧП не был подключен в сеть более года. В таком случае у конденсаторов истончается диэлектрический слой, и они могут не выдержать быстрой подачи на них полного номинального напряжения и рабочего тока. Тогда требуется реформинг или, иными словами, осторожное постепенное включение.
Защита от возгорания. Она организуется несколькими способами. Сами печатные платы должны быть изготовлены по соответствующей технологии и иметь UL маркировку. Далее необходимо обеспечить ширину силовых проводников на плате, исключающую их возгорание раньше, чем произойдёт выключение внешних силовых расцепителей.
Электробезопасность. Корпус ЧП обязательно должен заземляться. Варисторы на входе ЧП обеспечивают защиту от кратковременных перенапряжений, но при длительных перенапряжениях они сгорают, оставляя толстый слой проводящей сажи.
Тут в действие вступает заземление. Однако ставить чувствительные реле утечки на частотные преобразователи не рекомендуется, поскольку емкость мотора относительно земли настолько существенна, что может вызвать утечку большую чем уровень срабатывания реле. Поэтому заземление должно быть максимально надежным. Стоит также помнить, что заземление само по себе не обеспечивает защиту от электромагнитных помех, излучаемых самой цепью заземления. Поэтому все информационные кабели если они лежат рядом с цепью заземления или заземляющими конструкциями должны иметь свои экраны подключённые к собственным локальным землям. И такие экраны не должны образовывать замкнутых контуров.
Эксплуатационная безопасность. На роботизированных объекта, станках, агрегатах, подъемниках, кранах, эскалаторах — везде есть средства экстренной остановки в виде концевиков, датчиков, микровыключателей и проч. Чтобы люди сами могли активизировать экстренную остановку устанавливаются большие заметные красные кнопки. Все эти средства объединяются в электрическую цепь безопасности. Конечной точкой этой цепи являются контакторы, реле или иные ресцепители, обрывающие подачу тока на электродвигатели. На частотных преобразователях в роли расцепителя выступает узел STO (safe torque off) упомянутый выше. Обычно есть два дублирующихся входа STO, но в нашем ЧП есть только один. Это означает что для реализации дублирования средства безопасности дополнительно необходим внешний контактор, разрывающий цепь питания к ЧП при разрыве цепи безопасности. Так требуют стандарты.
В результате у нас получился вот такой ЧП
Для тех же кто заинтересовался проектом в директории JTAG_isolator лежит проект платы изолятора JTAG интерфейса.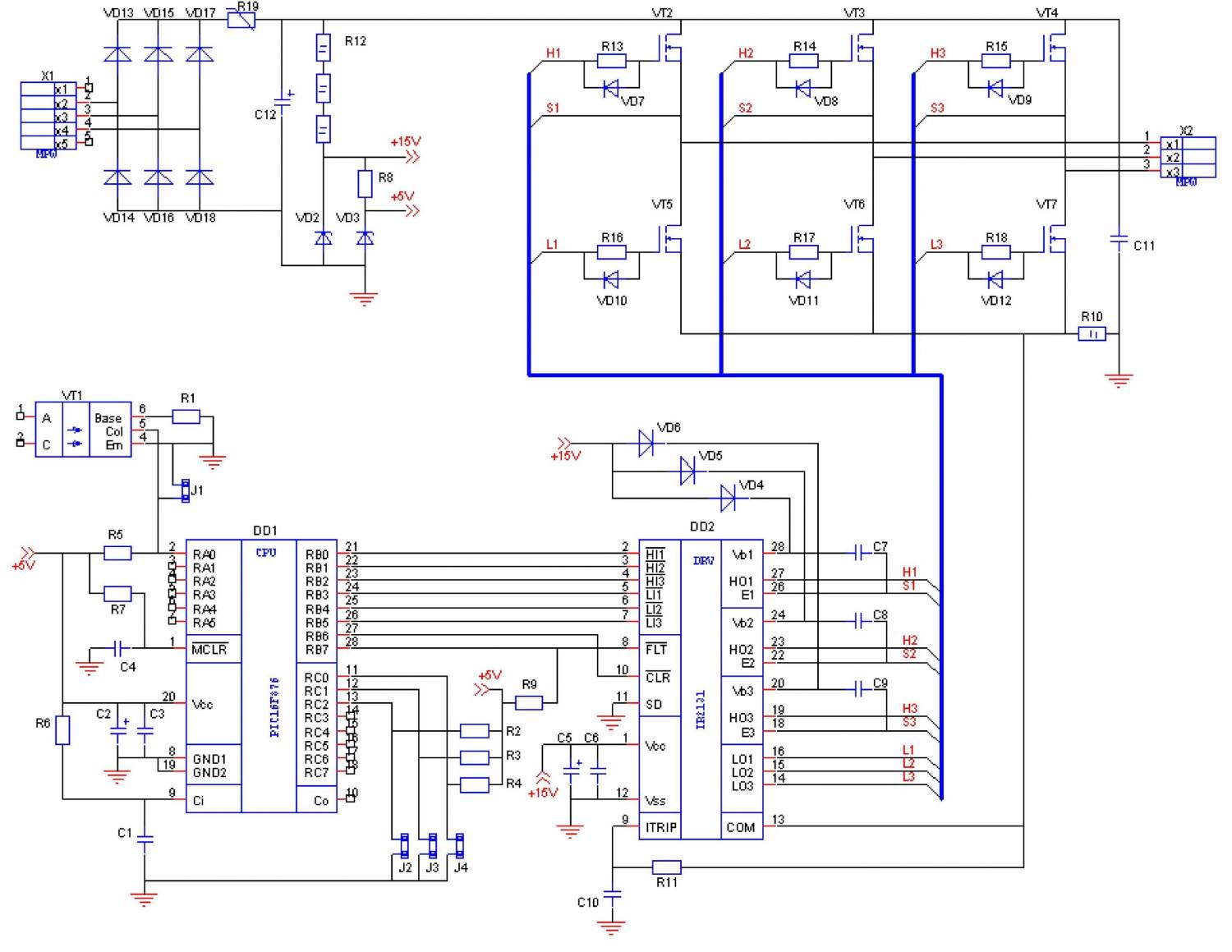 Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
К сожалению, формат короткой статьи для хабра не позволяет описать все перипетии разработки, алгоритмы, архитектуру софта и прочие подробности. Поэтому заранее прошу понимания читателей если тема не раскрыта в желаемом объёме.
Ещё есть время.
Все материалы по проекту частотного преобразователя лежат и накапливаются тут — https://github.com/Indemsys/Frequency_Inverter
микроконтроллер — Схема панели управления асинхронным двигателем
\$\начало группы\$
Снова обновлено:
Я работаю над этим проектом уже несколько недель, с конечной целью иметь панель управления для питания наших двух асинхронных двигателей на 120 В и 6 ламп на панели управления с использованием двух розеток на 120 В. Двигатели могут потреблять максимальный ток 8,8 А, поэтому я пытаюсь использовать некоторый ток от одной из розеток для питания преобразователя на 12 В.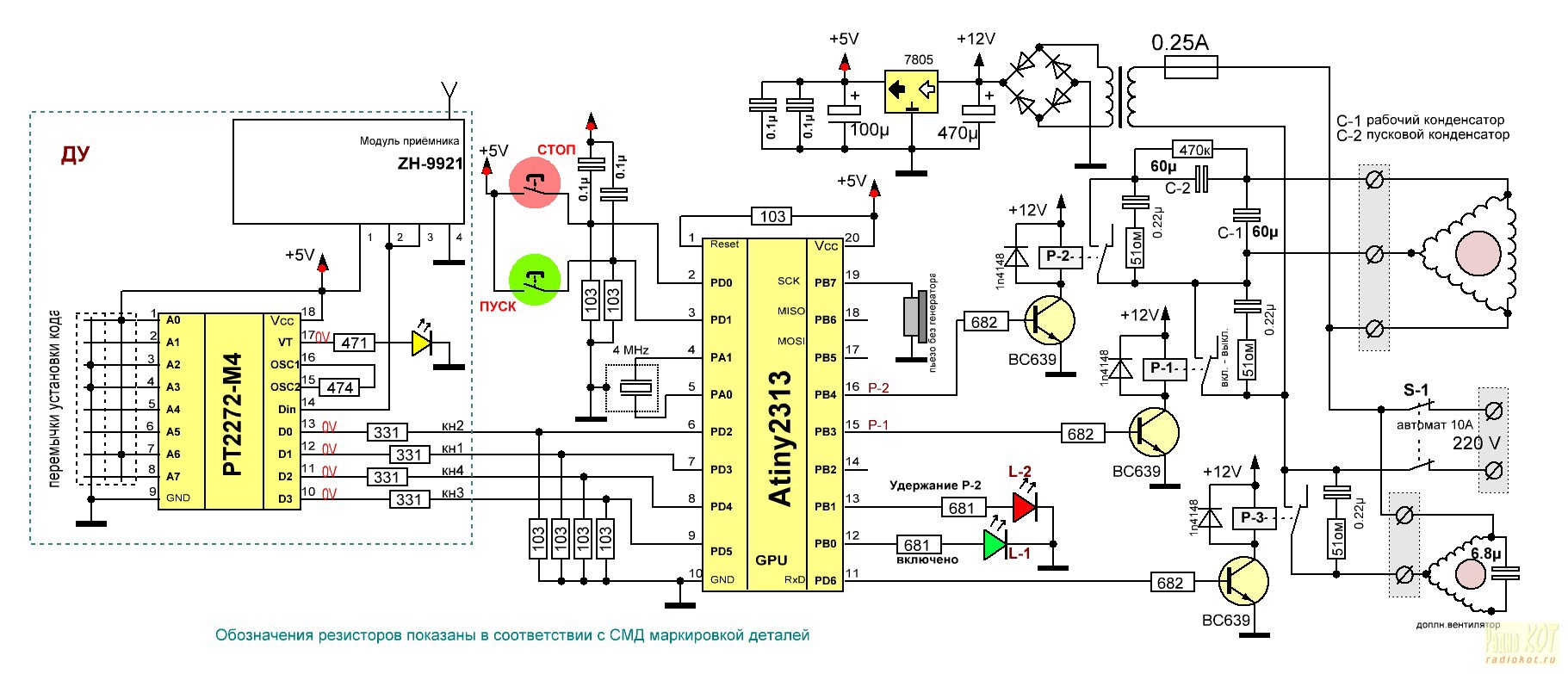 В этой части схемы используется обратная связь в сочетании с мостовым выпрямителем, конденсаторами и стабилизатором напряжения LM317 для получения выходного напряжения 12 В постоянного тока. Это необходимо для используемых мною светодиодов (имеющих номинальное напряжение 12 В) и для катушек реле, которые я выбрал для активации двигателей.
В этой части схемы используется обратная связь в сочетании с мостовым выпрямителем, конденсаторами и стабилизатором напряжения LM317 для получения выходного напряжения 12 В постоянного тока. Это необходимо для используемых мною светодиодов (имеющих номинальное напряжение 12 В) и для катушек реле, которые я выбрал для активации двигателей.
Единственное, что меня интересует/беспокоит в этой части, так это ее долговечность. Будут ли у него проблемы с работой в течение нескольких часов? И если да, то какие действия я должен предпринять, чтобы исправить это?
Я переделал схему в более читабельный и понятный вид, и переделал печатную плату с пластиной заземления с обеих сторон, подключенной ко всей земле 12В, и землей от основания обратного хода. Я также проложил землю от пико к плоскости земли и переориентировал источник питания. Это верно? Ниже приведена полная схема без винтовых клемм:
Что касается печатных плат, я считаю, что сделал их правильно. Я думаю, что мне, возможно, потребуется увеличить расстояние между мосфетами FQP30N06L, чтобы установить радиаторы, но в остальном я думаю, что это должно работать. Нужно ли мне что-то делать с заземляющим контактом второй розетки 120 В, поскольку я уже каким-то образом подключен к земле? Должен ли я добавить еще один набор винтовых клемм и соединить оба заземления напрямую, или это создаст контур заземления?
Я думаю, что мне, возможно, потребуется увеличить расстояние между мосфетами FQP30N06L, чтобы установить радиаторы, но в остальном я думаю, что это должно работать. Нужно ли мне что-то делать с заземляющим контактом второй розетки 120 В, поскольку я уже каким-то образом подключен к земле? Должен ли я добавить еще один набор винтовых клемм и соединить оба заземления напрямую, или это создаст контур заземления?
У меня также было несколько дополнительных вопросов. Если эти кнопки, которые я использую, рассчитаны на 660 В и 10 А, будут ли они работать даже с 3,3 В? На данный момент я рассматриваю возможность использования меньших. Наконец, не будет ли проблемой расстояние между землей и проводами 12 В, если оно слишком маленькое, и если да, то как мне это рассчитать?
- микроконтроллер
- блок питания
- система управления
- контроллер двигателя
- асинхронный двигатель
\$\конечная группа\$
4
\$\начало группы\$
Контакты заземления Pico следует использовать только для подключения Pico к земле. Заземляющие соединения двигателей и светодиодов должны подключаться непосредственно к заземлению источника питания, а не через Pico.
Заземляющие соединения двигателей и светодиодов должны подключаться непосредственно к заземлению источника питания, а не через Pico.
На первой схеме показан отрицательный источник питания, который, по-видимому, не используется. LM337 и связанные с ним компоненты (включая полумостовой выпрямитель) можно удалить.
\$\конечная группа\$
2
\$\начало группы\$
Комментарии к сегодняшней схеме:
Пожалуйста, подумайте о том, чтобы перерисовать блок питания на вашей схеме так, чтобы вход-выход проходил слева направо, а положительная шина находилась над отрицательной. (Поверните всю эту секцию на 180 градусов и сориентируйте крышки так, чтобы положительная рейка была направлена к верхней части схемы, а отрицательная — к нижней.)
К Pico не подключены контакты заземления. У вас также нет заземления регулятора U2. Это нужно исправить.
Это нужно исправить.
Я не уверен, почему у вас есть резистор на 50 Ом последовательно с выходом LM317. Это не подходящая замена предохранителю. Кроме того, когда вы включаете светодиоды и реле, напряжение падает, и вы можете в конечном итоге перегрузить 78L33.
Я оставлю комментарии по печатной плате, как только схема будет в лучшей форме.
\$\конечная группа\$
1
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и набора блоков управления двигателем Видео
С установленным блоком управления двигателем теперь вы можете разрабатывать и реализовывать алгоритмы управления для асинхронных двигателей, начиная с версии MATLAB 2020B. Справочные примеры, предоставленные с набором блоков, помогают вам симулировать алгоритм управления относительно моделей инвертора и двигателя. Вы также можете сгенерировать код из того же эталонного примера, который работает на частоте 20 кГц на вашем микроконтроллере.
Это образец для отгрузки и комплект блока управления двигателем для асинхронных двигателей. Это очень похоже на эталонный пример для PMSM. Вы можете обратиться к этому видео на PMSM для более подробной информации. Новые блоки для асинхронного двигателя включают контрольный блок управления ACIM, который принимает опорные значения темнового состояния и скорости обратной связи и вычисляет соответствующие опорные токи по осям b и q для опорного значения скорости.
Это дополнение к ПИ-регулятору, который управляет скоростью вращения ротора и создает эквивалентную контрольную точку для общей цели управления скоростью. Подобно эталонному примеру PMSM, вы можете реализовать алгоритм управления, ориентированный на поле, с помощью Кларка, Парка, Инверсного Парка, Генератора пространственного вектора и ПИ-контроллеров для токовых контуров ID и IQ.
Кроме того, алгоритм управления током реализует управление с прямой связью с использованием недавно добавленного блока управления с прямой связью ACIM для разделения токов доступа d и q, необходимых для реализации управления, ориентированного на поле [НЕРАЗБОРЧИВО]. В библиотеку управления двигателем также был добавлен новый блок оценки крутящего момента, который оценивает электромеханический крутящий момент и мощность с использованием значений обратной связи токов по осям d и q и обратной связи по скорости двигателя.
В асинхронных двигателях электрическая скорость отличается от механической. И, следовательно, недавно добавленная оценка скорости скольжения блока ACIM помогает оценить скорость скольжения для ориентированного на поле управления асинхронными двигателями. Как и в эталонном примере PMSM, вы можете обрабатывать измерения положения и скорости путем преобразования показаний, закодированных в квадратуре, в положение и скорость, используя эти блоки, предоставляемые набором блоков управления двигателем.
И, следовательно, недавно добавленная оценка скорости скольжения блока ACIM помогает оценить скорость скольжения для ориентированного на поле управления асинхронными двигателями. Как и в эталонном примере PMSM, вы можете обрабатывать измерения положения и скорости путем преобразования показаний, закодированных в квадратуре, в положение и скорость, используя эти блоки, предоставляемые набором блоков управления двигателем.
Сверьте алгоритм управления с линейными черными моделями для асинхронного двигателя и инвертора, используя соответствующие блоки, доступные в библиотеке управления двигателем. Смоделируйте модель с помощью кнопки запуска на вкладке моделирования и просмотрите результаты в инспекторе данных. Вы можете регистрировать и визуализировать любой интересующий вас сигнал в вашей модели, такой как скорость, крутящий момент нагрузки, токи ID IQ, напряжение фазы A, наблюдаемое двигателем, сигналы модуляции пространственного вектора и другие сигналы.
Вы можете анализировать реакцию алгоритма управления двигателем на различные сценарии, такие как влияние изменения крутящего момента двигателя или реверсирования скорости на ток IQ, как показано здесь, и соответствующее изменение напряжения фазы A и пространства Сигналы векторной модуляции. Это хорошо известные сигналы модуляции коэффициента заполнения с характерными формами, которые мы получили при модуляции пространственного вектора.
Это хорошо известные сигналы модуляции коэффициента заполнения с характерными формами, которые мы получили при модуляции пространственного вектора.
Вы можете проверить производительность контроллера, изменив параметры управления, и запустить несколько симуляций, пока не достигнете приемлемого уровня производительности. Интересно отметить, что в результатах симуляции не отбрасываются никакие точки данных, что делает Simulink важным инструментом отладки. При более внимательном рассмотрении легенды религии о времени обнаруживается, что внутренняя токовая петля, показанная здесь зеленым цветом, работает на частоте 20 килогерц.
Внешний регулятор скорости, показанный синим цветом, работает в 10 раз медленнее на частоте 2 килогерца. Затем вы можете перейти к реализации вашего алгоритма на встроенном микроконтроллере, нажав кнопку сборки, развертывания и запуска. Это генерирует код из модели Simulink, развертывает его на оборудовании DSC 2000, используемом в этой демонстрации, а затем запускает выполнение.
После завершения вы можете вращать двигатель с помощью главной модели. Эта модель устанавливает [НЕРАЗБОРЧИВО] связь с двигателем. Для демонстрации оборудования у нас есть простой асинхронный двигатель, соединенный с валом с СДПМ, чтобы создать динамометрическую установку. СДПМ обеспечивает обратную связь по скорости и действует как нагрузка для асинхронного двигателя.
Сгенерированный код выполняется на этом процессоре DSC 2000. Здесь вы можете установить опорную скорость, а также запускать и останавливать двигатель с помощью этой кнопки. Измените опорные значения скорости и посмотрите, как алгоритм управления отслеживает их. Теперь давайте попробуем изменить скорость.
Вы также можете посмотреть характеристики токов ID и IQ, выбрав их здесь. На осциллографе отображаются нормированные значения. Визуализируйте крутящий момент и мощность. И трехфазные токи тоже, используя эту модель. Как упоминалось ранее, сгенерированный код для текущего контура управления работает на частоте 20 кГц на оборудовании цифрового ввода, то есть менее 50 микросекунд.