
Принцип работы частотного преобразователя и критерии выбора
Неотъемлемой частью конструкций современных электродвигателей являются частотные преобразователи. Эти устройства позволяют получать «на выходе» частоту переменного тока, соответствующую заданному диапазону.
Преобразователи востребованы во всех сферах жизнедеятельности, связанных с электрической энергией. Результатом их действия становится стабильная работа сложных приводных механизмов без задействования традиционной регулирующей аппаратуры с минимизацией энергопотребления. При использовании таких устройств значительно повышается КПД используемого оборудования.
Сферы применения и преимущества использования
Рассматриваемые устройства обеспечивают плавное регулирование скорости электродвигателей. Этим и определяются области их использования, а именно:
- Вентиляционные системы.
- Приводные механизмы.
- Компрессоры.
- Дымососы.
- Конвейеры.

- Грузоподъемное оборудование.
- Деревообрабатывающее оборудование.
Современные модели отличаются расширенным перечнем функциональных возможностей. Это сохранение работоспособного состояния при нестабильном питании, исключение резонансных частот (продление срока эксплуатации), оптимальная работа в системе автоматического управления и возможность проведения идентификационного пуска, позволяющего настроить устройство под параметры обмоток вращающегося двигателя.
Подключение и настройка преобразователя частоты позволяет не только сгладить работу электродвигателя при его запуске и торможении, но и управлять целой группой двигателей (создание систем). Они значительно упрощают управление с повышением его надежности. Еще одно преимущество преобразователей — это возможность корректировки настроек в процессе работы.
Типы управления – особенности, достоинства
Существует два основных принципа управления частотных преобразователей для электродвигателей применимые во всех областях их использования, это:
- Скалярное.
 Оптимальный вариант для реализации управления более простыми механизмами. Выходное напряжение и выходная частота поддерживаются в постоянном соотношении (неизменно отношение максимального момента двигателя к текущему моменту нагрузки) – перегрузочная способность электродвигателя. Диапазон регулирования 1 : 40.
Оптимальный вариант для реализации управления более простыми механизмами. Выходное напряжение и выходная частота поддерживаются в постоянном соотношении (неизменно отношение максимального момента двигателя к текущему моменту нагрузки) – перегрузочная способность электродвигателя. Диапазон регулирования 1 : 40. - Векторное. Осуществление контроля над тремя параметрами: выходное напряжение, выходная частота, фаза. Регулирование скорости и момента на валу электродвигателя производится независимо на основе данных величины и угла пространственного вектора. Работа при частотах близких к нулю. Диапазон регулирования 1 : 1000 (гарантированная высокая точность).
Многофункциональность таких устройств значительно облегчает многие процессы. Лучше всего выбрать частотный преобразователь со встроенным логическим контроллером и возможностью подключения дополнительной платы для расширения входов/выходов.
Принцип работы устройства
В основе работы данного устройства лежит принцип двойного преобразования напряжения, подающегося на вход.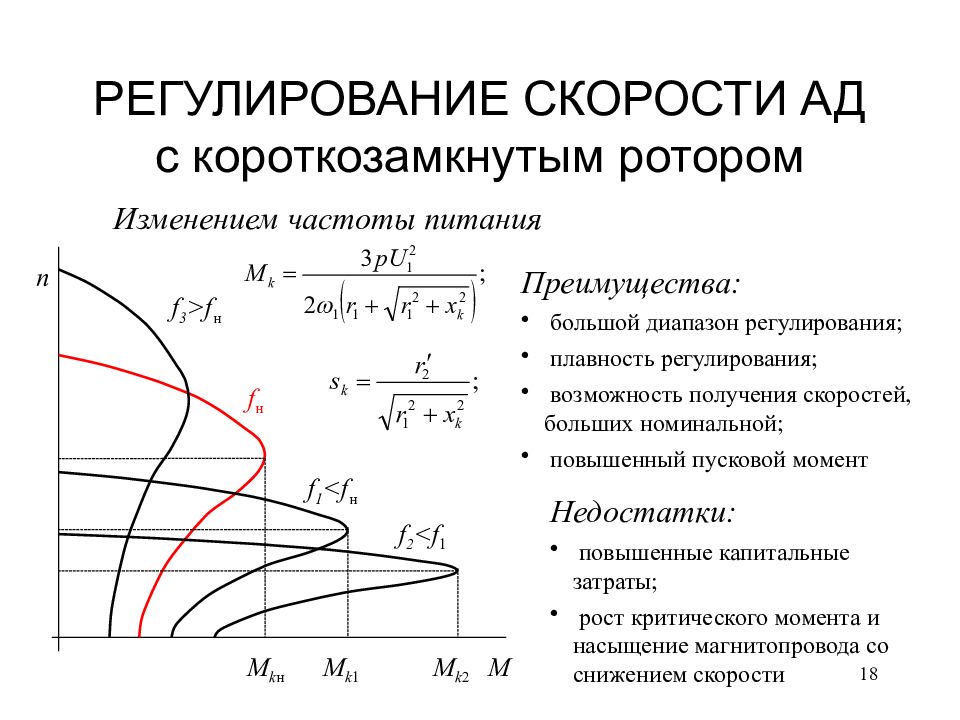 Конструкция представлена силовым механизмом на базе тиристоров/транзисторов и управляющего механизма (микропроцессор).
Конструкция представлена силовым механизмом на базе тиристоров/транзисторов и управляющего механизма (микропроцессор).
Обязательно последовательное исполнение 3 этапов:
- Выпрямление с помощью диодного блока.
- Фильтрация через конденсаторы.
- Инвертирование. Изменение характеристик тока с целью его преобразования из постоянного в переменный, и последующей возможности регулирования скорости вращения ротора двигателя.
В процессе преобразования принимает участие и сам двигатель, его индуктивность также влияет на кривую (сглаживание).
Схема подключения частотного преобразователя
Как сделать правильный выбор?
Современный рынок электротехнических устройств отличается широким ассортиментом, что значительно усложняет процесс подбора необходимого оборудования. В процессе приобретения обязательно учитываются следующие критерии:
- Мощность. При расчете учитывается мощность двигателя и его перегрузочная способность.
 Предпочтение отдается моделям с наиболее широким диапазоном мощностей.
Предпочтение отдается моделям с наиболее широким диапазоном мощностей. - Функциональность.
- Напряжение питающей сети. Два варианта: однофазная сеть 220-240 В и промышленная сеть 380 В.
- Система охлаждения. Воздушное (радиаторы на поверхности задней стенки) или жидкостное охлаждение.
- Тип двигателя (синхронный/асинхронный, низковольтный/высоковольтный).
- Способ управления
- Безопасность и защита (система ограничения тока при пуске, продолжительной работе/остановке, защита от перепадов напряжения и перегрева).
Каждый параметр определяется в индивидуальном порядке. Внимание обращается и на габаритные размеры устройства, а также материал его изготовления и герметичность корпуса. Частотные преобразователи в каталоге нашей компании представлены по максимально выгодным ценам.
Мы предлагаем своим клиентам качественную продукцию от ведущих производителей. Для того чтобы получить профессиональную консультацию и заказать промышленную технику звоните по телефонам: +375 (17) 513-99-91 или +375 (17) 513-99-93. Наши специалисты ответят на все вопросы и помогут сделать правильный выбор!
Для того чтобы получить профессиональную консультацию и заказать промышленную технику звоните по телефонам: +375 (17) 513-99-91 или +375 (17) 513-99-93. Наши специалисты ответят на все вопросы и помогут сделать правильный выбор!
Теория и расчет преобразователей, устройство плавного пуска расчет
Данный раздел посвящен теоретическим основам частотного регулирования и принципам работы устройства плавного пуска.
Принцип работы преобразователя частоты
Частотный преобразователь — устройство, позволяющее осуществлять регулирование скорости вращения электродвигателей посредством изменения частоты электрического тока.
Для понимания процесса частотного регулирования для начала необходимо вспомнить из курса электротехники принцип работы асинхронного электродвигателя.
Вращение вала электродвигателя происходит за счет магнитного поля создаваемого обмотками статора. Синхронная частота вращения магнитного поля зависит от частоты напряжения питающей сети f и выражается следующей зависимостью:
где p – число пар полюсов магнитного поля.
Под действием нагрузки частота вращения ротора электродвигателя несколько отличается от частоты вращения магнитного моля статора вследствие скольжения s:
Следовательно частота вращения ротора электродвигателя представляет собой зависимость от частоты напряжения питающей сети:
Таким образом требуемую частоту вращения вала электродвигателя np можно получить путем изменения частоты напряжения сети f. Скольжение при изменении частоты вращения не увеличивается, а соответственно потери мощности в процессе регулирования незначительны.
Для эффективной работы электропривода и обеспечения максимальных значений основных характеристик электродвигателя требуется вместе с частотой изменять и питающее напряжение.
Функция изменения напряжения в свою очередь зависит от характера момента нагрузки. При постоянном моменте нагрузки Mc = const напряжение на статоре должно регулироваться пропорционально частоте:
Для случаев вентиляторного режима:
При моменте нагрузки, обратно пропорциональном скорости:
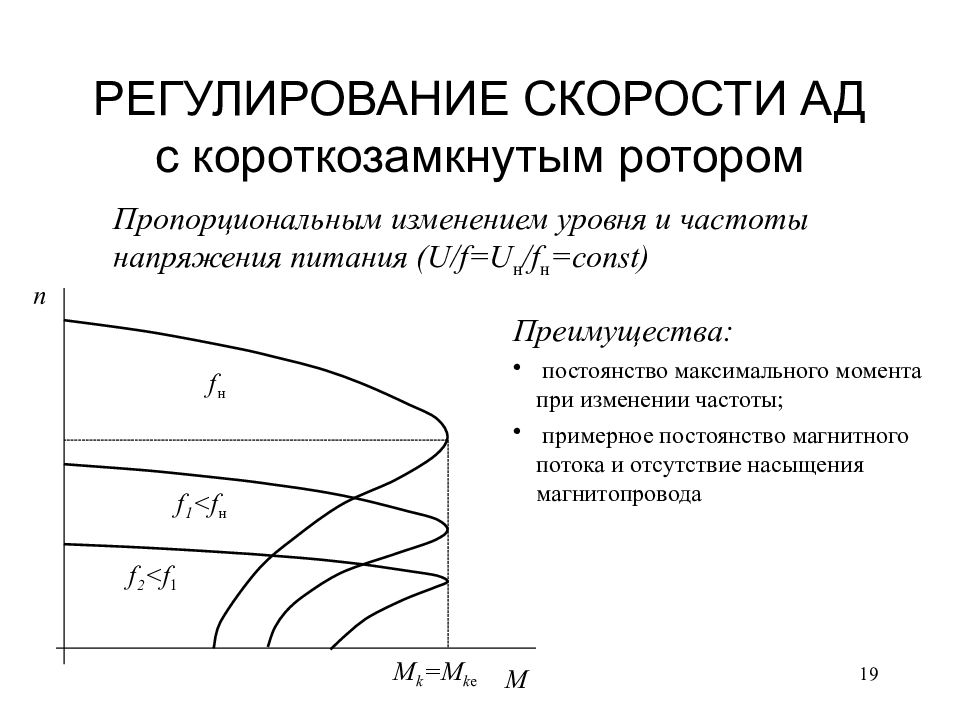
Таким образом, плавное регулирование частоты обеспечивается одновременным регулированием частоты и напряжения на статоре асинхронного двигателя.
Рис 1. Схема частотного преобразователя
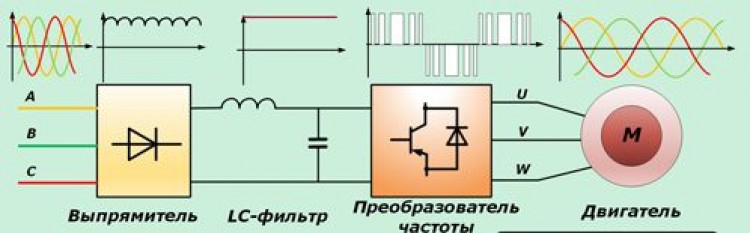
На рис. 1. представлена типовая блок-схема низковольтного преобразователя частоты. В нижней части рисунка для каждого блока наглядно изображены графики входных и выходных напряжений и токов.
Сначала напряжение сети (UBX) поступает на вход выпрямителя (1). Далее для сглаживание выпрямленного напряжения (UВЫПР) применяется конденсаторный фильтр (2). Затем уже постоянное напряжение (Ud) подается на вход инвертора (3), где происходит преобразование тока из постоянного обратно в переменный, формируя тем самым выходной сигнал с необходимыми значениями напряжения и частоты. Для получение сигнала синусоидальной формы применяются сглаживающий фильтр (4)
Для более наглядного понимания принципа работы инвертора рассмотрим принципиальную схему частотного преобразователя на рис. 2
Рис. 2 – принципиальная схема низковольтного преобразователя частоты
В основном в инверторах применяется метод широтно-импульсной модуляции (ШИМ). Принцип данного метода заключается в попеременном включении и выключении ключей генератора, формируя импульсы различной длительности (рис. 3). Синусоидальный сигнал получается за счет индуктивности двигателя или применения дополнительного сглаживающего фильтра.
Принцип данного метода заключается в попеременном включении и выключении ключей генератора, формируя импульсы различной длительности (рис. 3). Синусоидальный сигнал получается за счет индуктивности двигателя или применения дополнительного сглаживающего фильтра.
Рис. 3. Выходной сигнал преобразователя частоты
Таким образом, управляя процессом включения-выключения инверторных ключей, мы можем формировать выходной сигнал нужной частоты, а следовательно управлять технологическими параметрами механизма путем изменения частоты вращения привода.
Теория и принцип работы устройства плавного пуска
В связи с особенностями переходных процессов происходящих во время пуска электродвигателя токи обмоток достигают 6-8 кратной величины номинального тока электродвигателя, а вращающий момент на его валу достигает 150-200% от номинального значения. Как следствие это увеличивает риск поломки механической части двигателя, а также приводит к падению напряжения питающей сети.
Для решение данных проблем на практике применяется устройства плавного пуска электродвигателей, обеспечивающие постепенное увеличение токовой нагрузки.
Помимо снижения токовых нагрузок мягкие пускатели позволяют: .
- Снизить нагрев обмоток двигателя;
- Снизить просадки напряжения во время пуска;
- Обеспечить торможение и последующий запуск двигателя в установленный момент времени;
- Снизить гидроудары в напорных трубопроводах при работе в составе привода насоса;
- Снизить электромагнитные помехи;
- Обеспечить комплексную защиту электродвигателя при пропадании фазы, перенапряжении, заклинивании и пр;
- Повысить надежность и долговечность системы в целом.
Принцип работы УПП
Типовая схема устройства плавного пуска представлена на рис. 1
Рис. 1. Типовая схема устройства плавного пуска
Изменением угла открытия тиристоров осуществляется регулирования выходного напряжения УПП. Чем больше угол открытия тиристора — тем больше величина выходного напряжения, питающего электродвигатель.
Чем больше угол открытия тиристора — тем больше величина выходного напряжения, питающего электродвигатель.
Рис. 2. Формирование выходного напряжения УПП
Принимая во внимание то что величина крутящего момента асинхронного электродвигателя пропорциональна квадрату напряжения, то снижение напряжения снижает величину вращающего момента вала двигателя. При помощи такого метода пусковые токи электродвигателя снижаются до величины 2…4 IНОМ, при этом время разгона несколько увеличивается. Наглядное изменение механической характеристики асинхронного электродвигателя при понижении напряжении показано на рис. 3
Рис 3. Механические характеристика двигателя
Снижение токовой нагрузки в процессе мягкого пуска электродвигателя наглядно показаны на рис. 4.
Рис. 4. Диаграмма плавного пуска асинхронного электродвигателя показана
На рис. 1. продемонстрирована типовая схема устройства плавного пуска однако стоит отметить, что реальная схема мягкого пускателя будет завесить в первую очередь от условий его эксплуатации. Например, для бытового бытовой инструмента и электродвигателя привода промышленной дробилки требуются различные устройства плавного пуска. Важнейшими параметрами, определяющими режимы работы устройств плавного пуска, являются время пуска и максимальное превышение по току.
1. продемонстрирована типовая схема устройства плавного пуска однако стоит отметить, что реальная схема мягкого пускателя будет завесить в первую очередь от условий его эксплуатации. Например, для бытового бытовой инструмента и электродвигателя привода промышленной дробилки требуются различные устройства плавного пуска. Важнейшими параметрами, определяющими режимы работы устройств плавного пуска, являются время пуска и максимальное превышение по току.
В зависимости от этих параметров выделяют следующие режимы работы устройств плавного пуска:
- Нормальный: пуск 10-20 секунд, ток при пуске не более 3,5 Iном.
- Тяжелый: пуск порядка 30 секунд, тока при пуске не превышает 4,5 Iном
- Сверхтяжелый: время разгона не ограничено, системы с большое инерцией, пусковой ток в диапазоне 5,5…8 Iном
Устройства плавного пуска можно разделить на следующие основные группы:
1. Регуляторы пускового момента
Регуляторы пускового момента
Данный тип устройств осуществляет контроль только одной фазы трехфазного двигателя. Контроль одной фазой дает возможность снижать пускового момент электродвигателя двигателя, но при этом снижение пускового тока происходит незначительное. Устройства данного типа не могут применяться для уменьшения токовых нагрузок в период пуска, а также для пуска высокоинерционных нагрузок. Однако они нашли применение в системах с однофазными асинхронными электродвигателями.
2. Регуляторы напряжения без обратной связи
Данный тип устройств работает по следующему принципу: пользователь задает величину начального напряжения и время его нарастания до номинальной величины и наоборот. Регуляторы напряжения без обратной связи могут осуществлять контроль как двух так и трех фаз электродвигателя. Такие регуляторы обеспечивают снижение пускового тока снижением напряжения в процессе пуска.
3. Регуляторы напряжения с обратной связью
Данный тип УПП представляет собой более совершенную модель описанного выше устройств. Наличие обратной связи по позволяет управлять процессом увеличения напряжения добиваясь оптимального режима пуска электродвигателя. Данные о токовой нагрузке позволяет также организовать комплексную защиту электродвигателя от перегрузки, перекоса фаз и т.п.
Наличие обратной связи по позволяет управлять процессом увеличения напряжения добиваясь оптимального режима пуска электродвигателя. Данные о токовой нагрузке позволяет также организовать комплексную защиту электродвигателя от перегрузки, перекоса фаз и т.п.
4. Регуляторы тока с обратной связью
Регуляторы тока с обратной связью представляют собой наиболее совершенные устройства плавного пуска. Принцип работы основан на прямом регулировании тока а не напряжения. Это позволяет добиться наиболее точное управление пуском электродвигателя, а также облегчает настройку и программирование УПП.
Преобразователь частоты для электродвигателя
Статус технологии
Содержимое заголовка
рассмотрено НИУ «МЭИ»
Наименование фирмы
description_for_technology2
Полное название технологии
description_for_technology3
Преобразователи частоты серии JX
Короткое название технологии
description_for_technology4
Суть энергосберегающего эффекта
description_for_technology5
Целесообразно для решения задач управления двигателями, сравнительно небольшой мощности до 7,5 кВт.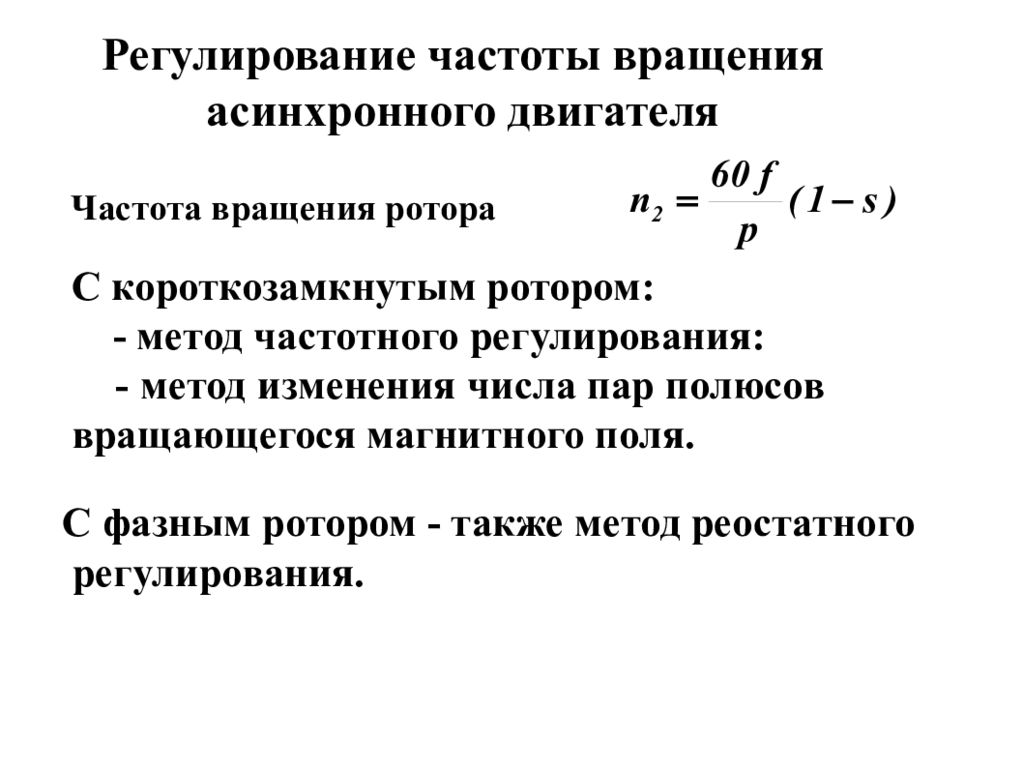
Применение двигателей с ЧРП целесообразно при резко переменной нагрузке в зависимости, например, от технологии, времени суток, количества людей в здании и др. Применение частотно-регули-руемого электропривода вентиляторов позволяет снизить расход электроэнергии на перемещение воздуха у вытяжных систем на 6—26 % и у приточных систем на 3—12 %, при этом срок окупаемо-сти может составлять от 5 месяцев. Внедрение систем частотного регулирования, например, в приводах электродвигателей городских насосных станциях водоснабжения дает экономию электроэнергии 40—70 %, на насосных станциях дополнительно по теплу 20 %, по воде 15—20 %; окупаемость составляет 3—18 мес.
Полное техническое описание, текст
description_for_technology6
• Преобразователь частоты с вольт-частотным управлением
• Монтаж в один ряд
• Встроенный ЭМС-фильтр
• Встроенный интерфейс RS-485 Modbus
• Функция обнаружения перегрузки (150 % в течение 60 с)
• Встроенный ПИД-регулятор
• Подавление микробросков напряжения
• Автоматическое энергосбережение
• Аварийное выключение
• Настройка параметров для второго двигателя
• Автоматическое снижение несущей частоты
• Вход для PTC-термистора
• Управление охлаждающим вентилятором
• Программа для конфигурирования на ПК: CX-Drive
• CE, UL, cUL, RoHS, ГОСТ Р
Номинальные параметры
• Класс 200 В, однофазные, от 0,2 до 2,2 кВт
• Класс 200 В, трехфазные, от 0,2 до 7,5 кВт
• Класс 400 В, трехфазные, от 0,4 до 7,5 кВт
Техническое описание
Например, для рассчитанной вытяжной вентиляции в производственном помещении при мощности приводного электродвигателя вытяжного вентилятора PНОМВУ1=35 кВт, КПД электродвигателя η эдВУ1=0,92, коэффициенте механической загрузки КЗВУ1=0,57, график окупаемости выглядит так
Для рассчитанной вытяжной вентиляции в
производственном помещении при мощности приводного электродвигателя вытяжного
вентилятора PНОМВУ1=350 кВт, КПД электродвигателя η эдВУ1=0,92, коэффициенте
механической загрузки КЗВУ1=0,57, график окупаемости выглядит так
Чем выше мощность
приводного электродвигателя вентилятора (при прочих равных), тем быстрее окупается установка на
него частотного преобразователя.
Полное техническое описание, файлы
description_for_technology7
Инструкция и описание
Вид основного экономящегося энергоресурса
description_for_technology8
Электрическая энергия
Вид вторичного экономящегося энергоресурса
description_for_technology9
Электрическая энергия
Минимальный возможный процент экономии, %
description_for_technology10
Максимальный возможный процент экономии, %
description_for_technology11
Средний срок окупаемости (лет)
description_for_technology12
Патент
description_for_technology13
Метрологические сертификаты
Контактный телефон
description_for_technology14
Авторы разработки
description_for_technology15
description_for_technology16
https://industrial.omron.ru/ru/misc/forms/contact?referrer=13723
Сайт
description_for_technology17
https://industrial. omron.ru/ru/products/catalogue/motion_and_drives/frequency_inverters/basic_solution/default.html
omron.ru/ru/products/catalogue/motion_and_drives/frequency_inverters/basic_solution/default.html
|
Изображение страницы |
Причина появления частотного регулирования электродвигателей
Необходимость в управлении частотой вращения асинхронных электрических двигателей возникла сразу же после того, как они были изобретены. И хотя задача стояла острым вопросом, выполнить такую реализацию удалось лишь после появления полупроводниковых силовых приборов тиристоров, которые позже были заменены на транзисторы. Самой главной возлагавшейся на устройства задачей стало сокращение энергоресурсов, растрачиваемых на использование электродвигателя в заданных производством технологических процессах. Благодаря этому, за период уж более чем в полвека удалось освободить короткозамкнутые двигатели от проблемы стандартной частоты вращения, определив для каждого из них индивидуальный источник энергии управляемой частоты.
Наиболее совершенным на сегодняшний день устройством по регулирования скорости электрического двигателя является так называемый преобразователь частоты, именуемый ещё инвертором. Благодаря ему, подающееся на устройство напряжение с постоянным значением и амплитудой преобразовывается на переменное. Полученные таким способом частотные значения подаются на электродвигатель, заставляя изменяться и частоту вращения его магнитного поля. Это же изменяет и скорость вращения выходного вала электродвигателя. Таким способом, двигатель получает:
- Постоянную корректировку рабочей скорости;
- Быстрое изменение вращающегося момента, в соотношении к механической нагрузке;
- Минимальное количество потерь, благодаря поддержанию в условиях любой нагрузки и при любой скорости постоянного скольжения.
Преимущества использования двигателей с частотным регулированием
Благодаря тому, что частотники смогли полностью урегулировать работу электродвигателя, в производственных и прочих сферах это принесло массу преимуществ от их применения, как со стороны управления, так и показателей экономичности, повышения качества и прочих.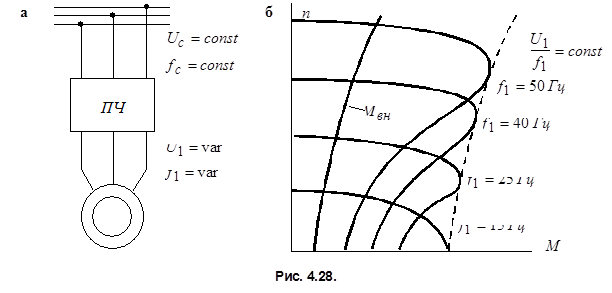 Наиболее значимыми среди них являются:
Наиболее значимыми среди них являются:
- Возможность выполнять управление удалённо, не приближаясь к зоне обработки, где установлен двигатель;
- Увеличение производительности за счёт регулирования рабочей скорости в соответствии с производственными потребностями и эксплуатируемым оборудованием;
- Высокое качество получаемого продукта, достигаемое точным контролем требуемых скоростных параметров;
- Снижение затрат за счёт мягкого запуска двигателя. Это помогает уберечь оборудование от перегрузок, способных вывести его из строя, что грозит растратами на замену оборудования либо на внеплановое техническое обслуживание.
Так же, преимуществом преобразователей частот является высоких уровень универсальности, о чём говорит возможность их применения как в условиях постоянного, так и переменного момента нагрузки. Это помогает уменьшить подаваемое на электродвигатель напряжение (при переменном моменте) и повысить эффективность системы за счёт плавного регулирования заданных скоростных параметров (при постоянном моменте).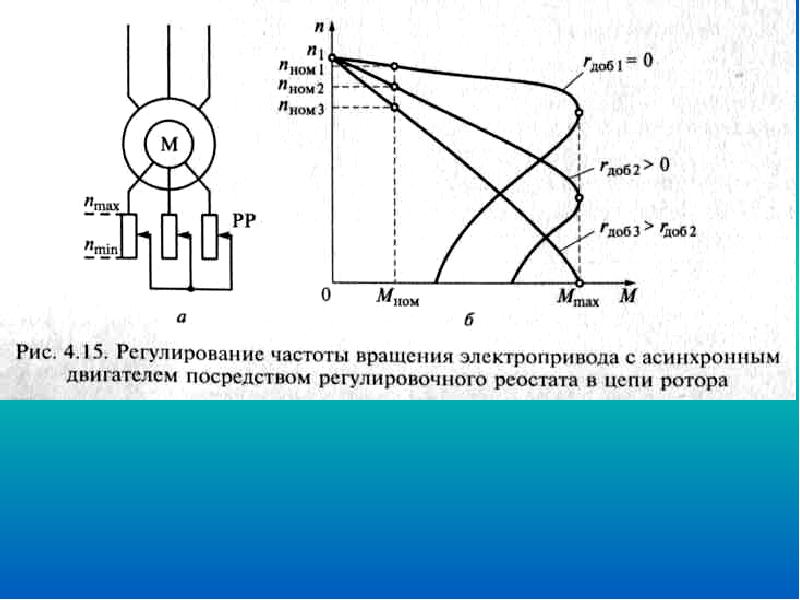 Не менее важен и момент торможения. До внедрения частотников, не регулируемые электродвигатели работали до полного их останова, при этом, используя в момент нового пуска большое количество энергозатрат. Регулирование времени торможения позволило использовать двигатель в качестве генератора, приводящего не растраченную энергию кинетическую в электрическую. Используя данный феномен с функцией плавного пуска, получаем:
Не менее важен и момент торможения. До внедрения частотников, не регулируемые электродвигатели работали до полного их останова, при этом, используя в момент нового пуска большое количество энергозатрат. Регулирование времени торможения позволило использовать двигатель в качестве генератора, приводящего не растраченную энергию кинетическую в электрическую. Используя данный феномен с функцией плавного пуска, получаем:
- отсутствие видимых сетевых перегрузок;
- отсутствие нагрузки на рабочую систему, в том числе и на сам двигатель;
- отсутствие больших затрат энергии.
Единственным недостатком в такой системе является выделяемая преобразователем излишняя энергия, что может привести к перегреву устройства. В этом случае используют внешнее сопротивление.
Устройства, работающие с частотным регулированием
Использование регуляторов частоты вращения приводных механизмов на сегодняшний день актуально в большинстве сфер деятельности человека, начиная от коммунальных и хозяйственных систем и заканчивая заводскими конвейерными линиями. Наибольшее распространение они получили в качестве управляющих и регулирующих устройств для следующих систем, устройств и механизмов:
Наибольшее распространение они получили в качестве управляющих и регулирующих устройств для следующих систем, устройств и механизмов:
- Насосы и насосные системы:
- регулируют уровень воды в ёмкостях на очистительных станциях;
- регулируют давление в системе бойлерных, котельных и прочих станциях с горячим водоснабжением;
- обеспечивают стабильность водооборота в охладительных системах как на крупных, так и мелких предприятиях;
- обеспечивают экономный расход электроэнергии при пониженном уровне потребления или при достижении нужного уровня рабочей жидкости в различных системах.
- Системы воздухоочистки, вентиляции и кондиционирования:
- помогают контролировать с помощью датчиков степень загрязнения и уровень безопасного химического состава воздуха;
- регулируют нагрузку;
- управляют уровнем влажности и температуры.
- Лифтовые и транспортёрные системы, конвейерные линии:
- обеспечивают плавное и равномерное движение элементов;
- поддерживают высокую энергоёмкость системы;
- контролируют перепады крутящих моментов при возникновении нагрузок;
- регулируют рабочие параметры в соответствии загруженности систем, например, в течение суток, времени года.

Исходя из этого, можно сделать вывод, что использование устройств по регулированию частоты вращения приводов способствует увеличению эффективности многих промышленных процессов, сохраняя надёжность и работоспособность каждой цепочки на долгие годы, экономя, тем самым, бюджетные средства.
Частотные преобразователи Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Частотные преобразователи двигателей, частотный преобразователь для асинхронных электродвигателей, цены ниже
В ООО «Промпривод» постоянно имеются на складе частотные преобразователи Lenze, Delta Electronics и Innovert. Кроме того, существует возможность поставки под заказ частотных преобразователей других производителей.
Общие сведения.
При работе с электрооборудованием нередко возникает необходимость управления частотой вращения асинхронного электродвигателя. Для этого могут использоваться гидравлические муфты, дополнительные резисторы в цепи роторных и статорных обмоток, механические вариаторы, электромеханические преобразователи частоты и, наконец, статические преобразователи. Первые четыре способа регулирования недостаточно экономичны, трудоёмки при их реализации и малоэффективны.
Поэтому давайте более подробно рассмотрим последний тип преобразователя — частотный преобразователь двигателя.
Обеспечивается плавное регулирование скорости вращения в широком диапазоне при сохранении достаточно жёстких механических характеристик.
Регулирование скорости, кроме того, не вызывает увеличения коэффициента скольжения асинхронного двигателя, поэтому потери мощности при регулировании малы.
Но для того, чтобы обеспечить высокие показатели экономичности асинхронного двигателя — коэффициент мощности, коэффициент полезного действия, способность к перегрузкам — одновременно с частотой должно меняться и подводимое напряжение.
Вывод: для плавного (бесступенчатого) регулирования частоты вращения вала, требуется частотный преобразователь для электродвигателя, который должен обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке последнего.
Теоретическое обоснование метода частотного регулирования было проведено достаточно давно, но реализацию его тормозила высокая стоимость компонентов, необходимых для создания модуля частотного управления. И лишь появление силовых схем на IGBT-транзисторах, а также разработка высокопроизводительных микропроцессорных систем управления позволили создать современные преобразователи частоты приемлемой стоимости.
Принцип работы.
Большинство промышленных преобразователей частоты работают по схеме двойного преобразования. Они состоят из трех основных узлов: неуправляемого выпрямителя, силового импульсного инвертора и управляющего модуля.
Неуправляемый выпрямитель преобразует напряжение сети в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор собран на шести транзисторных ключах. Через эти ключи каждая из обмоток статора электродвигателя подключается к выводам выпрямителя по специальной программе, задаваемой управляющим модулем. Эта программа и обеспечивает получение в обмотках статора стандартных 3-х фазных сигналов (аналогов сигналов 3-х фазной сети). Таким образом, инвертор осуществляет обратное преобразование выпрямленного напряжения в трехфазное переменное напряжение. Но при этом преобразовании уже появляется возможность регулирования параметров 3-х фазного сигнала. В качестве ключей в инверторе используются силовые IGBT-транзисторы, имеющие высокую частоту переключения, что позволяет воспроизвести синусоидальный сигнал с высокой степенью точности.
Области применения.
Использование частотного преобразователя для асинхронных двигателей для регулирования скорости движения конвейеров и транспортировочных устройств даёт значительную экономию электроэнергии и увеличивает эффективность использования этих средств. Тот же результат получается в случае использования этого метода регулировки при управлении насосными установками. Благодаря его применению без труда удаётся поддерживать в системе нужное давление и регулировать её производительность. При использовании регулируемого привода в станках мы можем плавно изменять скорость подачи или главного движения.
Тот же результат получается в случае использования этого метода регулировки при управлении насосными установками. Благодаря его применению без труда удаётся поддерживать в системе нужное давление и регулировать её производительность. При использовании регулируемого привода в станках мы можем плавно изменять скорость подачи или главного движения.
В НАШЕМ АССОРТИМЕНТЕ ТАКЖЕ ПРЕДСТАВЛЕНЫ:
Мотор-редукторы Innovari (Италия) – экономичные, надежные червячные и цилиндрические мотор-редукторы, компактные насадные редукторы.
Экономичные по цене, но очень надежные датчики Autonics (Южная Корея) — индуктивные и емкостные датчики, оптические датчики, датчики угла поворота (энкодеры), датчики контроля параметров среды.
Датчики UWT GmbH (Германия) — датчики контроля и измерения уровня сыпучих продуктов — песок, опилки, цемент, мука, гранулят. Ротационные (механические), вибровилки, акустические (измерение до 60 м), лотовые системы (электромеханические датчики непрерывного измерения уровня).
Ротационные (механические), вибровилки, акустические (измерение до 60 м), лотовые системы (электромеханические датчики непрерывного измерения уровня).
Новые уникальные сервоприводы Position Servo компании Lenze. Возможны различные режимы управления: моментом, скоростью вращения, ведущий-ведомый с электронным редуктором.
Электродвигатели для частотного регулирования
Используются, в первую очередь, для комплектации регулируемого привода с преобразователем частоты (инвертором), а также иногда для эксплуатации в составе нерегулируемого привода с питанием от стандартной электросети.
Электродвигатели АДЧР, предназначенные для работы с частотным регулированием, могут быть выполнены по схеме самовентиляции (вентилятор охлаждения, установленный на валу двигателя), а также по схеме с принудительной вентиляцией (вентилятор охлаждения с независимым питанием).
Электродвигатели с самовентиляцией имеют ограничения по глубине регулирования скорости вращения на низких оборотах (из-за возможного перегрева электродвигателя) и на оборотах с превышением номинальной частоты вращения (из-за дополнительного снижения полезного момента на валу). Электродвигатели с независимой вентиляцией лишены этих недостатков во всем диапазоне скоростей.
Электродвигатели с независимой вентиляцией лишены этих недостатков во всем диапазоне скоростей.
Электродвигатели АДЧР могут быть оборудованы электромагнитным тормозом. Это бывает вызвано требованиями к безопасности оборудования, в состав которого входит электродвигатель, а также необходимостью удержания нагрузки при отключенном питании электродвигателя.
На электродвигателях АДЧР, используемых в системах точного регулирования и позиционирования, устанавливается датчик скорости/положения, позволяющий с заданной точностью контролировать скорость вращения вала электродвигателя и его положение.
Основное (базовое) исполнение — электродвигатель, предназначенный для режима работы S1, от сети переменного тока 50 Гц напряжением 380В. Климатическое исполнение и категория размещения У3, степень защиты IP54, категория А по ГОСТ Р МЭК 60034-14-2008, температурный класс изоляции обмоток – F, встроенный в обмотки электродвигателя термодатчик РТС с выводами в клеммной коробке.
ЭЛЕКТРОДВИГАТЕЛИ АДЧР БАЗОВОГО ИСПОЛНЕНИЯ (АДЧР «0»)
Рис 1. Электродвигатель АДЧР модификации «0» |
Комплектация: принудительная вентиляция, электромагнитный тормоз, датчик скорости/положения отсутствуют. Назначение: для комплектации частотно-регулируемого привода, а также для эксплуатации в составе нерегулируемого привода с питанием от стандартной электросети. Используются в составе привода насосов, вентиляторов, конвейеров ит.п., а также в качестве замены обычных асинхронных электродвигателей. Изготавливаются во всех габаритных размерах электродвигателей. Ограничения в применении: так как для охлаждения электродвигателя применяется вентилятор, установленный на валу (самовентиляция), эффективное охлаждение обеспечивается только начиная с выходной частоты инвертора около 30 Гц; допустимая глубина регулирования — около 1:3. |

ЭЛЕКТРОДВИГАТЕЛИ АДЧР С НЕЗАВИСИМОЙ ВЕНТИЛЯЦИЕЙ (АДЧР «В»)
Рис. 2а. Электродвигатель АДЧР модификации «В» Компоновка: встроенный вентилятор |
Рис. 2б. Электродвигатель АДЧР модификации «В» Компоновка: вентилятор «наездник» |
Комплектация: Электродвигатель с принудительной вентиляцией. Электромагнитный тормоз, датчик скорости/положения отсутствуют.
Назначение: для использования в составе частотно-регулируемого привода при продолжительной работе во всех диапазонах рабочих скоростей. Используются в приводе конвейерных систем, центрифуг, автоматических линий и т.п. Изготавливаются во всех габаритных размерах электродвигателей.
Ограничения в применении: так как датчик скорости/положения в данной модификации отсутствует, то максимальная глубина регулирования с преобразователем частоты может составлять 1:10, при использовании специальных типов инверторов до 1:20…40.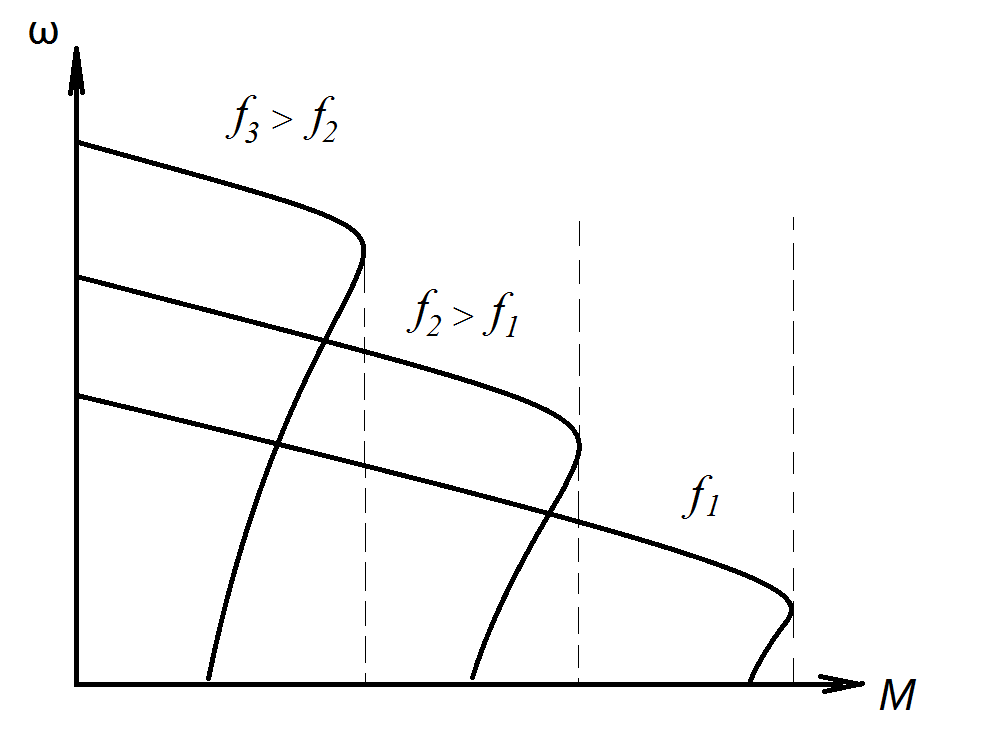
Варианты исполнения принудительной вентиляции:
- Встроенный вентилятор. Разъем управления вентилятором устанавливается на кожухе вентиляции. Может устанавливаться встроенный вентилятор с собственной клеммной коробкой (электродвигатели 250-315 габарита), в этом случае разъем не устанавливается. Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А
- Вентилятор «наездник». Питание вентилятора осуществляется непосредственно через клеммную коробку вентилятора «наездника». Напряжение питания — трехфазное, 380В. Ток цепи вентилятора не более 3А
ЭЛЕКТРОДВИГАТЕЛИ АДЧР С ЭЛЕКТРОМАГНИТНЫМ ТОРМОЗОМ (АДЧР «Т»)
Рис 3. Электродвигатель АДЧР модификации «Т» |
Комплектация: Электродвигатель с электромагнитным тормозом. Назначение: для использования в составе частотно-регулируемого привода (статический тормоз) или с прямым питанием от электросети (динамический тормоз) при необходимости обеспечивать удержание вала электродвигателя при отключении силового питания электродвигателя, а также в системах, требующих повышенной безопасности. Используются в приводе грузоподъемных механизмов, конвейерных систем, центрифуг, автоматических линий и т.д. Изготавливаются во всех габаритных размерах электродвигателей. Ограничения в применении: 1. Так как для охлаждения электродвигателя применяется вентилятор, установленный на валу (самовентиляция), эффективное охлаждение обеспечивается только начиная с выходной частоты инвертора около 30 Гц; допустимая глубина регулирования — около 1:3. Максимальная скорость – не выше номинальной. |
 Принудительная вентиляция и датчик скорости/положения отсутствуют.
Принудительная вентиляция и датчик скорости/положения отсутствуют.
2. При использовании такого типа электродвигателя с прямым питанием от электросети, требуется установка динамического тормоза.
При использовании такого типа электродвигателя с прямым питанием от электросети, требуется установка динамического тормоза.
Варианты исполнения электромагнитного тормоза:
Динамический тормоз – предназначен как для удержания вала электродвигателя при отключенном силовом питании, так и для систематической остановки электродвигателя тормозом с рабочей скорости.
Статический тормоз – предназначен для удержания вала после остановки электродвигателя преобразователем частоты. Торможение электродвигателя с рабочей скорости статическим тормозом возможно только при аварийной ситуации.
Ручное растормаживание. Тормоз с ручным растормаживанием позволяет выполнять растормаживание вала вручную при помощи специальной рукоятки, расположенной на электродвигателе.
Контроль срабатывания. На тормозе может устанавливаться датчик состояния тормоза, контакты которого позволяют получать информацию о реальном состоянии тормоза.
ЭЛЕКТРОДВИГАТЕЛИ АДЧР С ДАТЧИКОМ СКОРОСТИ/ПОЛОЖЕНИЯ И НЕЗАВИСИМОЙ ВЕНТИЛЯЦИЕЙ (АДЧР «ДВ»)
Рис.  4а. Электродвигатель АДЧР модификации «ДВ» 4а. Электродвигатель АДЧР модификации «ДВ»Компоновка: встроенный вентилятор |
Рис. 4б. Электродвигатель АДЧР модификации «ДВ» Компоновка: вентилятор «наездник» |
Комплектация: Электродвигатель с датчиком скорости/положения и принудительной вентиляцией. Электромагнитный тормоз отсутствует.
Назначение: Работа совместно с частотно-регулируемым приводом при необходимости обеспечения большой глубины регулирования скорости, точного контроля скорости вращения, управления моментом в любом диапазоне скоростей от 0 об/мин до максимальной. Изготавливаются во всех габаритных размерах электродвигателей.
Используются в точном машиностроении, станках с ЧПУ, грузоподъемных механизмах, конвейерных системах, автоматических линиях.
Особенности конструкции датчика скорости/положения (энкодера):
- питание 5 В
- число инкрементов на оборот – 2500
- выходной сигнал – TTL
- потребляемый ток датчика – не более 200 мА
- разъем подключения энкодера устанавливается на силовой клеммной коробке
Варианты исполнения принудительной вентиляции:
- Встроенный вентилятор.
 Разъем управления вентилятором устанавливается на кожухе вентиляции. Может устанавливаться встроенный вентилятор с собственной клеммной коробкой (электродвигатели 250-315 габарита), в этом случае разъем не устанавливается. Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А
Разъем управления вентилятором устанавливается на кожухе вентиляции. Может устанавливаться встроенный вентилятор с собственной клеммной коробкой (электродвигатели 250-315 габарита), в этом случае разъем не устанавливается. Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А - Вентилятор «наездник». Питание вентилятора осуществляется непосредственно через клеммную коробку вентилятора «наездника». Напряжение питания — трехфазное, 380В. Ток цепи вентилятора не более 3А.
ЭЛЕКТРОДВИГАТЕЛИ АДЧР С ЭЛЕКТРОМАГНИТНЫМ ТОРМОЗОМ И НЕЗАВИСИМОЙ ВЕНТИЛЯЦИЕЙ (АДЧР «ТВ»)
Рис. 5а. Электродвигатель АДЧР модификации «ТВ» Компоновка: встроенный вентилятор |
Рис. 5б. Электродвигатель АДЧР модификации «ТВ» Компоновка: вентилятор «наездник» |
Комплектация: Электродвигатель с электромагнитным тормозом и принудительной вентиляцией. Датчик скорости/положения отсутствует.
Датчик скорости/положения отсутствует.
Назначение: Работа совместно с частотно-регулируемым приводом при продолжительной работе во всем диапазоне рабочих скоростей и при необходимости удержания вала при отключении питания электродвигателя, а также в оборудовании, требующем повышенной безопасности. Устанавливается тормоз статического типа. Изготавливаются во всех габаритных размерах электродвигателей.
Используются в грузоподъемных механизмах, конвейерных системах, автоматических линиях, центрифугах и т.п.
Ограничения в применении: так как датчик скорости/положения в данной модификации отсутствует, то максимальная глубина регулирования с преобразователем частоты может составлять 1:10, при использовании специальных типов инверторов до 1:20…40.
Варианты исполнения принудительной вентиляции:
- Встроенный вентилятор. Разъем управления вентилятором устанавливается на кожухе вентиляции. Может устанавливаться встроенный вентилятор с собственной клеммной коробкой (электродвигатели 250-315 габарита), в этом случае разъем не устанавливается.
 Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А
Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А - Вентилятор «наездник». Питание вентилятора осуществляется непосредственно через клеммную коробку вентилятора «наездника». Напряжение питания — трехфазное, 380В. Ток цепи вентилятора не более 3А
Особенности конструкции электромагнитного тормоза:
- в стандартной комплектации изготавливается с тормозом статического типа без ручного растормаживания с напряжением питания 200В DC, комплектуется выпрямителем питания для тормоза 220В АС
- разъем управления (питания) тормоза устанавливается на силовой клеммной коробке
- момент удержания тормоза не менее номинального момента электродвигателя
ЭЛЕКТРОДВИГАТЕЛИ АДЧР С ЭЛЕКТРОМАГНИТНЫМ ТОРМОЗОМ, ДАТЧИКОМ СКОРОСТИ/ПОЛОЖЕНИЯ И НЕЗАВИСИМОЙ ВЕНТИЛЯЦИЕЙ (АДЧР «ТДВ»)
Рис. 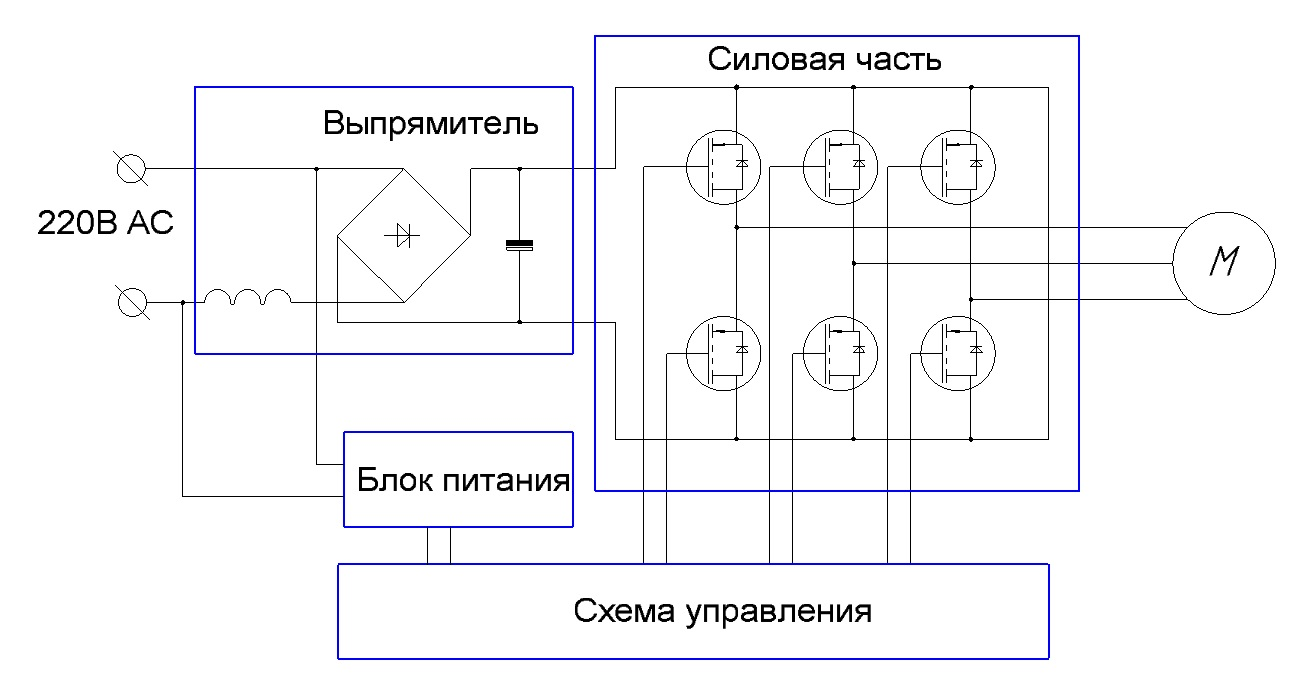 6а. Электродвигатель АДЧР модификации «ТДВ» 6а. Электродвигатель АДЧР модификации «ТДВ»Компоновка: встроенный вентилятор |
Рис. 6б. Электродвигатель АДЧР модификации «ТДВ» Компоновка: вентилятор «наездник» |
Комплектация: Электродвигатель с электромагнитным тормозом, датчиком скорости/положения и принудительной вентиляцией.
Назначение: Работа совместно с частотно-регулируемым приводом при необходимости обеспечения точного контроля скорости вращения, получения большой глубины регулирования скорости, управления моментом во всем диапазоне рабочих скоростей и при необходимости удержания вала при отключении питания электродвигателя, а также в оборудовании, требующем повышенной безопасности. Изготавливаются во всех габаритных размерах электродвигателей.
Используются в точном машиностроении, станках с ЧПУ, грузоподъемных механизмах, конвейерных системах, автоматических линиях и т.д.
Варианты исполнения принудительной вентиляции:
- Встроенный вентилятор.
 Разъем управления вентилятором устанавливается на кожухе вентиляции. Может устанавливаться встроенный вентилятор с собственной клеммной коробкой (электродвигатели 250-315 габарита), в этом случае разъем не устанавливается. Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А
Разъем управления вентилятором устанавливается на кожухе вентиляции. Может устанавливаться встроенный вентилятор с собственной клеммной коробкой (электродвигатели 250-315 габарита), в этом случае разъем не устанавливается. Напряжение питания вентилятора для габаритов 63÷100 – однофазное, 220В; для габаритов 112÷315 – трехфазное, 380В. Ток цепи вентилятора не более 2А - Вентилятор «наездник». Питание вентилятора осуществляется непосредственно через клеммную коробку вентилятора «наездника». Напряжение питания — трехфазное, 380В. Ток цепи вентилятора не более 3А
Особенности конструкции электромагнитного тормоза:
- в стандартной комплектации изготавливается с тормозом статического типа без контроля срабатывания, без ручного растормаживания с напряжением питания 200В DC, комплектуется выпрямителем питания для тормоза 220В АС
- разъем управления (питания) тормоза устанавливается на силовой клеммной коробке
- момент удержания тормоза не менее номинального момента электродвигателя
Особенности конструкции датчика скорости/положения (энкодера):
- питание 5 В;
- число инкрементов на оборот – 2500;
- выходной сигнал – TTL;
- потребляемый ток датчика – не более 200.

Перейти к каталогу двигателей ELDIN
Применение частотного регулирования электродвигателя насоса для привода исполнительного оборудования Текст научной статьи по специальности «Механика и машиностроение»
_МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «СИМВОЛ НАУКИ» №11-3/2016 ISSN 2410-700Х_
УДК 62-523.3
А.В. Кожухова,
к.т.н, доцент
ФБГОУ ВО «Донской государственный технический университет» ДГТУ
г. Ростов-на-Дону, Россия Худокормов В.В., магистрант гр. УМГА-11 ФБГОУ ВО «Донской государственный технический университет» ДГТУ
г. Ростов-на-Дону, Россия
ПРИМЕНЕНИЕ ЧАСТОТНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ НАСОСА ДЛЯ ПРИВОДА ИСПОЛНИТЕЛЬНОГО ОБОРУДОВАНИЯ
Аннотация
Применение электродвигателей с частотным регулированием гидравлических насосов для привода исполнительного оборудования позволяет снизить энергопотребление в рабочем цикле при его работе.
Ключевые слова
Частотное регулирование, дроссельное регулирование, объемное регулирование, электродвигатель,
гидравлический насос, энергопотребление.
Выполнен анализ работы прессов, применяемых для сращивания древесины по длине, выполненных с различным конструктивным решением исполнительных механизмов. На этой основе установлено, что в рабочем цикле шток гидроцилиндра осуществляет прямой ход, при котором совершается процесс сжатия древесины и когда процесс сжатия заготовки завершается шток гидроцилиндра может совершать ускоренное движение в обратном направлении.
Известно, что при сжатии шток гидроцилиндра должен двигаться с некоторой допустимой скоростью и уровнем давления для обеспечения необходимого качества в процессе сращивания заготовок (чтобы не повредить соединение и чтобы оно было надежным в будущем), а при обратном направлении штока, его скорость должна быть максимальной. На основании изложенного, целью данного исследования является повышение производительности работы гидравлического пресса, применяемого для сращивания древесины по длине.
На основании изложенного, целью данного исследования является повышение производительности работы гидравлического пресса, применяемого для сращивания древесины по длине.
Для достижения поставленной цели необходимо решить задачу — выполнить анализ известных способов управления скоростью движения исполнительного элемента пресса и выбрать такой способ, у которого уровень энергопотребления является минимальным и при этом обеспечивается высокое качество сращивания древесины по длине.
Существуют три распространенных способа регулирования скорости — дроссельный, объемный и частотный, основанный на изменении частоты вращения вала электродвигателя, связанного с валом насоса [1, с. 87], [2, с. 82], [3, с. 94]. Дроссельный способ регулирования скорости гидравлических двигателей характеризуется изменением величины жидкости подаваемой к потребителю потока рабочей среды через прохождение ее через суживающиеся каналы. Для этого используются аппараты регулирования расхода в виде дросселя. Насосы в виде источников энергии, используются, как правило, нерегулируемые.
Для этого используются аппараты регулирования расхода в виде дросселя. Насосы в виде источников энергии, используются, как правило, нерегулируемые.
Рисунок 1 — Схемы дроссельного регулирования скорости движения гидравлических двигателей
_МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «СИМВОЛ НАУКИ» №11-3/2016 ISSN 2410-700Х_
На рис. 1 представлены две схемы дроссельного регулирования скорости (с последовательным и с параллельным соединением дросселя и насоса). В первом случае часть жидкости расходуется на преодоление сопротивления
дросселя, то есть ее основная часть уходит через клапан в сливной бак, а значит, мы теряем некоторую часть расхода жидкости и соответственно мощности насоса. Теоретически это можно представить так:
@др Q н @кл Qц = Qдр
Nn = Qnx Рц % = РцХ (Qh — Qкл)
где Qдр, QH, Q^ Qrn — соответственно, объемы рабочих камер дросселя, насоса, цилиндра, клапана.ц = Рц х — QДр)
Следовательно, потери мощность в гидросистеме возникают при открытии дросселя, то есть при снижении скорости перемещения штока гидроцилиндра. Недостатком такого регулирования, в первом случае, является
то, что энергия потока рабочей жидкости расходуется на проталкивание ее через рабочие щели регулирующих аппаратов и за счет этого переходит в тепловую энергию.
В результате этого происходит нагрев рабочей жидкости ее испарение и снижение смазывающей способности. Во второй схеме принцип остается тот
же. В обоих случаях это выражаются в снижении КПД гидросистемы. Эти
недостатки ограничивают область применения дроссельного регулирования.
Объемный способ регулирования скорости гидроцилиндра характеризуется применением регулируемых насосов.ц = Рц х Сц = Рн х Qн
Этот способ является более эффективный по сравнению с дроссельным.
Но для реализации такой гидравлической системы требуется установка дорогостоящего насоса с объемным регулированием.
Рисунок 2 — Схема объемного регулирования скорости движения гидравлических двигателей
_МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «СИМВОЛ НАУКИ» №11-3/2016 ISSN 2410-700Х_
Чтобы уменьшить влияния этих недостатков можно использовать регулирование частоты вращения вала насоса на основе частотного способа регулирования вала электродвигателя. Применение регулируемого электродвигателя обеспечивает решение проблемы энергосбережения и, в свою очередь, это позволяет получать новые качества для устройств с такими двигателями. При применении этого способа на выходе насоса можно поддерживать давление близкое к постоянной величине и регулировать расход
жидкости на входе в гидроцилиндр. При использовании этого способа регулирования получается, что объем камеры величина постоянная, изменяется
лишь частота вращения вала двигателя и тогда мощность определяется по формуле:
N = VH х Рн х пн Где Пн — частота вращения вала двигателя.
На сегодняшний день, доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, вал насоса. Перспективность частотного регулирования наглядно показано на рис. 3.
0 0,25 0,5 0.75 1,0
Рисунок 3 — График сравнения способов регулирования
Применение регулируемого электродвигателя для привода насоса позволяет управлять расходом и давлением жидкости, что обеспечит не только экономию электроэнергии, но и повышает ресурс работы жидкости и гидросистемы в целом. Современные преобразователи частоты состоит из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Применение электродвигателей с частотным способом регулированием вала гидравлических насосов в прессах позволяет решить следующее. Во-первых решить проблему снижения энергопотребления, а во-вторых, повысить производительность процесса сращивания древесины по длине с одновременным повышением качества изделий из древесины.
Список использованной литературы:
1. Кожухова А.В. Математическая модель объемных потерь в объемно-роторной гидромашине при насосном и частотном управлении. Успехи современной науки и образования. 2016. Т5. №7.С.86-89.
2. Кожухова А.В. Сравнительный анализ способов регулирования скорости движения выходного звена объемного гидропривода. Успехи современной науки и образования. 2016. Т3. №6.С.81-84.
3. Кожухова А.В. Математическая модель объемного гидропривода с частотным управлением. Наука и мир. 2016.Т1. №5 (33). С.92-96.
©Кожухова А.В., Худокормов В.В., 2016
Проблемы регулирования частоты в электроэнергетической системе Северной Америки (Технический отчет)
Кирби, Б. Дж. Проблемы регулирования частоты в североамериканской электроэнергетической системе . США: Н. П., 2003.
Интернет. DOI: 10,2172 / 885842.
Кирби, Б. Дж. Проблемы регулирования частоты в североамериканской электроэнергетической системе .Соединенные Штаты. https://doi.org/10.2172/885842
Кирби, Б. Дж. Ср.
«Проблемы управления частотой в электроэнергетической системе Северной Америки». Соединенные Штаты. https://doi.org/10.2172/885842. https://www.osti.gov/servlets/purl/885842.
@article {osti_885842,
title = {Проблемы регулирования частоты в электроэнергетической системе Северной Америки},
author = {Кирби, Б. Дж.},
abstractNote = {В этой статье исследуется взаимосвязь между системной частотой, надежностью и рынками.Это было вызвано отклонениями частоты, которые наблюдались недавно в 22:00 ежедневно, но в более общем плане он связан с вопросом о том, какой контроль частоты необходим. В документе не содержится новой информации или документов о новых исследованиях. Он также не предназначен для ознакомления читателей с вопросами инженерии энергосистем. Вместо этого цель состоит в том, чтобы пересмотреть хорошо известные истины, касающиеся энергосистемы, и по-новому изучить базовую взаимосвязь между частотой, надежностью и рынками: сделать шаг назад, если хотите, чтобы увидеть, не упускаем ли мы что-то в целом.В этой статье внимание уделяется частоте и надежности. Частота, не соответствующая номинальной, может повлиять на надежность и эффективность рынка (в том смысле, в котором мы здесь используем этот термин) четырьмя способами. Это может повредить оборудование (генерацию, передачу или нагрузку). Это может ухудшить качество продукта, поставляемого конечным пользователям (например, при слишком низкой освещенности и недопустимом мерцании света). Это может привести к обрушению самой энергосистемы (например, из-за срабатывания защитных действий системы). Или это может привести к перегрузке линий электропередачи, поскольку различные генераторы пытаются восстановить частоту системы, что влияет на эффективность рынков.Часто эти причины действуют согласованно. Системы защиты генераторов принимают меры, например, для предотвращения повреждения генератора, но усугубляют общий дисбаланс генерации / нагрузки. Работа разделена на два раздела. За введением следует раздел под названием «Перспектива регулирования частоты», в котором рассматриваются физические требования энергосистемы и то, как рыночные транзакции взаимодействуют с физической системой. В разделе «Стандарты частоты и характеристики управления» обсуждаются различные политики NERC и регионального совета по надежности, которые регулируют производительность коммунальных предприятий и их связь с частотой и надежностью.Наконец, сделаны выводы.},
doi = {10.2172 / 885842},
url = {https://www.osti.gov/biblio/885842},
журнал = {},
номер =,
объем =,
place = {United States},
год = {2003},
месяц = {3}
}
Изменение частоты напряжения
Отклонение от номинального напряжения:
В соответствии с NEMA MG 1, 12.44, двигатели должны успешно работать в рабочих условиях при номинальной нагрузке с колебаниями напряжения до следующих процентов номинального напряжения:
- Универсальные двигатели, кроме двигателей вентиляторов — плюс-минус 6 процентов (при номинальной частоте).
- Асинхронные двигатели — плюс-минус 10 процентов (с номинальной частотой).
Характеристики при этих колебаниях напряжения не обязательно будут соответствовать стандартам, установленным для работы при номинальном напряжении.
Отклонение от номинальной частоты:
Двигатели переменного тока должны успешно работать в рабочих условиях при номинальной нагрузке и номинальном напряжении с изменением частоты до 5 процентов выше или ниже номинальной частоты. Характеристики в пределах этого изменения частоты не обязательно будут соответствовать стандартам, установленным для работы на номинальной частоте.
Комбинированное изменение напряжения и частоты:
Двигатели переменного тока должны успешно работать в рабочих условиях при номинальной нагрузке с комбинированным изменением напряжения и частоты до 10 процентов выше или ниже номинального напряжения и номинальной частоты, при условии, что изменение частоты не превышает 5 процентов.Характеристики в этом комбинированном варианте не обязательно будут соответствовать стандартам, установленным для работы при номинальном напряжении и номинальной частоте.
Влияние колебаний напряжения и частоты на работу асинхронных двигателей:
- Асинхронные двигатели время от времени работают в цепях напряжения или частоты, отличных от тех, на которые они рассчитаны. В таких условиях характеристики двигателя будут отличаться от номинальных.Ниже приводится краткое изложение некоторых эксплуатационных результатов, вызванных небольшими колебаниями напряжения и частоты, и указывающих на общие изменения, вызванные такими изменениями рабочих условий.
- При увеличении или уменьшении напряжения на 10 процентов по сравнению с указанным на паспортной табличке, нагрев при номинальной мощности нагрузки может увеличиться. Такая работа в течение продолжительных периодов времени может ускорить разрушение системы изоляции.
- В двигателе с нормальными характеристиками при полной номинальной мощности нагрузки 10-процентное увеличение напряжения по сравнению с указанным на паспортной табличке обычно приводит к значительному снижению коэффициента мощности.Снижение напряжения на 10 процентов ниже значения, указанного на паспортной табличке, обычно приводит к увеличению коэффициента мощности.
- Заторможенный ротор и момент пробоя будут пропорциональны квадрату приложенного напряжения.
- Увеличение напряжения на 10 процентов приведет к уменьшению скольжения примерно на 17 процентов, а уменьшение на 10 процентов увеличит скольжение примерно на 21 процент. Таким образом, если скольжение при номинальном напряжении составляет 5 процентов, оно будет увеличено до 6,05 процента, если напряжение будет уменьшено на 10 процентов.
- Частота выше номинальной обычно улучшает коэффициент мощности, но снижает крутящий момент заторможенного ротора и увеличивает скорость, трение и потери на ветер. При частоте ниже номинальной скорость уменьшается, крутящий момент заторможенного ротора увеличивается, а коэффициент мощности уменьшается. Для определенных видов нагрузки двигателя, например, на текстильных фабриках, необходимо точное регулирование частоты.
- Если изменение напряжения и частоты происходит одновременно, эффект будет наложен.Таким образом, если напряжение высокое, а частота низкая, крутящий момент заторможенного ротора будет значительно увеличен, но коэффициент мощности будет уменьшен, а повышение температуры увеличится при нормальной нагрузке.
- Изложенное выше относится, в частности, к двигателям общего назначения. Они не всегда могут быть верными в отношении двигателей специального назначения, построенных для определенной цели или применительно к очень маленьким двигателям.
Работа многофазных 2-, 4- и 8-полюсных асинхронных двигателей переменного тока общего назначения мощностью 60 Гц, работающих на частоте 50 Гц:
В то время как универсальные многофазные 2-, 4-, 6- и 8-полюсные асинхронные двигатели переменного тока с частотой 60 Гц не предназначены для работы на частоте 60 Гц в цепях с частотой 50 Гц, они могут удовлетворительно работать на частоте 50 Гц. цепей, если их номинальное напряжение и мощность в лошадиных силах соответственно уменьшены.Когда такие двигатели с частотой 60 Гц работают в цепях с частотой 50 Гц, подаваемое напряжение на частоте 50 Гц должно быть уменьшено до 5/6 от номинальной мощности двигателя в 60 Гц.
Когда двигатель 60 Гц работает на частоте 50 Гц при напряжении 5/6 от 60 Гц и номинальной мощности лошадиных сил , другие рабочие характеристики для режима 50 Гц следующие:
- Скорость
Синхронная скорость будет 5/6 от синхронной скорости 60 Гц, а скольжение будет составлять 6/5 от скольжения 60 Гц. - Крутящий момент
Номинальный крутящий момент нагрузки в фунт-футах будет примерно таким же, как номинальный крутящий момент нагрузки 60 Гц в фунт-футах. Крутящий момент с заторможенным ротором и крутящий момент в фунт-футах двигателей с частотой 50 Гц будет примерно таким же, как у двигателей с заторможенным ротором с частотой 60 Гц, и крутящие моменты срабатывания в фунт-футах. - Ток заторможенного ротора
Ток заторможенного ротора (ампер) будет примерно на 5 процентов меньше, чем ток заторможенного ротора 60 Гц (амперы).Буква кода на паспортной табличке двигателя, обозначающая, что кВА с заторможенным ротором на одну лошадиную силу, применима только к двигателю с номинальной частотой 60 Гц. - Коэффициент обслуживания
Коэффициент обслуживания будет 1,0. - Повышение температуры
Повышение температуры не должно превышать 90 ° C.
Влияние напряжения свыше 600 В на работу низковольтных двигателей:
Многофазные двигатели обычно изготавливаются для номинального напряжения 575 вольт или меньше и, как ожидается, будут удовлетворительно работать при изменении напряжения на плюс или минус 10 процентов.Это означает, что двигатели с таким уровнем изоляции могут успешно применяться до рабочего напряжения 635 вольт.
На основании испытаний, проведенных производителями двигателей с высоким потенциалом, и эксплуатационных характеристик в полевых условиях, было обнаружено, что там, где рабочее напряжение превышает 635 вольт, коэффициент безопасности изоляции снижается до уровня, несовместимого с надлежащими инженерными процедурами.
Ввиду вышеизложенного, двигатели с этим уровнем изоляции не должны применяться в энергосистемах с заземленной нейтралью или без нее, где напряжение превышает 630 вольт, независимо от используемого подключения двигателя.
Зачем использовать преобразователь частоты вместе с электродвигателем? — Леонардо Энергия
Стефан Фассбиндер (DKI)
Электродвигатель и электрогенератор — это в основном одно и то же. .
В принципе, любой электродвигатель также может вырабатывать электричество. Электроприводы намного опережают двигатели внутреннего сгорания, так как, к сожалению, двигатель автомобиля, который всасывает выхлопные газы во время торможения и спусков и преобразует их в топливо и свежий воздух, все еще не готов.Электродвигатель может это обеспечить, хотя в течение первого столетия его использования его использование в значительной степени затруднялось двумя основными недостатками:
- Электродвигатель не имеет педали акселератора.
- Розетка не имеет никакого «водопроводного крана».
Когда электродвигатель работает, он генерирует напряжение с полярностью, противоположной питающему напряжению .
Следовательно, ток слишком высок при первом включении, когда двигатель еще не работает.Для больших двигателей необходимо принять меры предосторожности, чтобы не повредить их и не сгореть предохранители. По мере увеличения скорости двигателя это индуцированное напряжение увеличивается. Фактически, при превышении скорости, при которой приложенное напряжение и напряжение сети равны, двигатель будет генерировать более высокое напряжение, чем напряжение в линии. Ток будет течь в обратном направлении, и двигатель изменит свою функцию на функцию генератора.
Это хорошо, так как предлагает отличные преимущества в области энергоэффективности , особенно для кранов, лифтов и т. Д.которые фактически становятся электростанциями при движении вниз. Что не так хорошо, так это то, что линия всегда имеет примерно одинаковое напряжение, но по отношению к другим нагрузкам, например огни, это должно быть так. Следовательно, положения должны быть предусмотрены снова, если скорость двигателя должна быть изменена . Раньше это было обременительной задачей. Приходилось использовать трансформаторы с несколькими ответвлениями, например, в локомотивах, но это было громоздкое и дорогое решение, или ограничивать ток резисторами, например, в трамваях, что было неэффективным решением.
И все становится еще сложнее, когда дело доходит до двигателей переменного тока , однофазных или трехфазных. Принцип электродвигателя всегда заключается в создании вращательного движения за счет притяжения и отталкивания магнитных сил. В строгих терминах физики электродвигатели даже не существуют, но все они должны быть названы магнитными двигателями с точки зрения пуриста: электрический магнит притягивает другой — также электрический или постоянный — магнит, пока он не подойдет как можно ближе как может быть.Затем полярность тока в (одном из) электрического магнита (-ов) инвертируется, и сила притяжения превращается в отталкивающую. Механическая конструкция двигателя устроена так, чтобы допускать такое движение только по кругу, поскольку требуется вращательное движение. Двигатели переменного тока могут быть построены проще, чем двигатели постоянного тока, потому что периодическая смена полярности происходит в любом случае и не должна генерироваться внутри машины.
Но становится очевидным, что изменение скорости вращения затруднительно для двигателей постоянного тока , так как оно в значительной степени зависит от питающего напряжения, которое приблизительно стабильно, и невозможно для двигателей переменного тока, скорость которых строго совпадает с частотой сеть, которая с технической точки зрения полностью стабильна.
Теперь любой тип электродвигателя должен быть спроектирован таким образом, чтобы при желаемой (номинальной) скорости напряжение, генерируемое в двигателе, было примерно таким же, как приложенное (номинальное) рабочее напряжение. В двигателях постоянного тока индуцированное напряжение должно быть несколько ниже, чем в линии. При нагрузке двигатель постоянного тока немного теряет скорость, что приводит к дальнейшему падению наведенного напряжения и, следовательно, к большей разнице между линейным напряжением и более высокому входному току, соответствующему более высокой нагрузке. Таким образом, он адаптируется (более или менее) по своей природе к изменяющейся нагрузке.
Это преимущество перед двигателем внутреннего сгорания и одно из существенных отличий в рабочих характеристиках, которые будут обсуждаться здесь. Представьте, что вы выключаете двигатель автомобиля и кладете кирпич на педаль акселератора. Вы не должны этого делать. Электродвигатель, однако, не будет возражать, если он будет работать на полном напряжении без нагрузки — за исключением, возможно, одного конкретного типа — последовательно соединенной коллекторной машины. Большие блоки могут фактически быть разрушены центробежными силами, когда они питаются полным напряжением и без нагрузки.Небольшие единицы, например, используемые в кухонной технике и e. грамм. для стеклоочистителя в автомобиле иметь достаточные потери на трение, чтобы предотвратить это. Но при фиксированном питающем напряжении определенная скорость всегда будет связана с фиксированной выходной и входной мощностью. Поскольку не существует простой и понятной вещи, такой как водопроводный кран на кухне и в ванной, который можно было бы подключить к розетке для управления потоком электричества, регулирование мощности и / или скорости электродвигателя было решено. сложная задача еще до изобретения силовой электроники.
В большей степени это относится к двигателям переменного тока. Скорость синхронной машины абсолютно стабильна, будь то машина, используемая в качестве двигателя или генератора. Что ж, он действительно немного теряет скорость в течение очень ограниченного времени, когда, например, он переключается с нейтрального режима на двигатель, как раз до тех пор, пока фазовый угол между электрической фазой и положением ротора больше не будет «синфазным». . После этого короткого периода перехода скорость двигателя и частота сети снова будут синхронизированы.Можно представить себе этот процесс так:
Когда машина работает без нагрузки, генерируемое ею переменное напряжение высокое, когда линейное напряжение высокое, и низкое, когда линейное напряжение низкое. Они находятся в фазе друг с другом, поэтому практически в любом случае ток не течет (грубо говоря, игнорируя аспекты реактивной мощности, специалисты подчеркнут здесь).
Поскольку электрическая мощность (а также ее мгновенные значения) рассчитывается как напряжение, умноженное на ток, изменение напряжения или тока на противоположное означает изменение знака и, следовательно, изменение направления потока энергии.Теперь, когда машина работает как двигатель, генерируемое ею переменное напряжение отстает от приложенного напряжения. Оно все еще несколько ниже, когда напряжение в сети уже достигает своего пика, поэтому ток будет течь из сети в машину; так что он действует как мотор. К тому времени, когда ток, наконец, поменяет полярность, линейное напряжение также поменяется местами, поэтому мы умножаем два раза на -1 и застреваем в работе двигателя.
Когда мы приводим вал машины в движение, чтобы она работала как генератор, генерируемое им переменное напряжение опережает приложенное напряжение.Оно уже снова падает, когда напряжение в сети достигает своего пика, поэтому ток будет течь из машины в сеть. К тому времени, как ток поменяет полярность… и так далее.
Теперь все становится трудным, когда мы переходим к обсуждению наиболее широко используемой электрической машины , асинхронного двигателя , поскольку процессы, которые ее приводят в действие, трудно представить в иллюстративной форме. Электромагниты расположены по обеим сторонам статора и ротора. Обмотки ротора закорочены и действуют как вторичные обмотки трансформатора.Магнитное поле, вращающееся в статоре, индуцирует ток в закороченных обмотках ротора, который затем создает собственное магнитное поле. Как и в синхронной машине, полюса полей статора, управляемые частотой сети, бегают по кругу и, так сказать, преследуют полюса поля ротора перед собой. Итак, ротор начинает вращаться. Асинхронный двигатель всегда будет вращаться немного медленнее, чем магнитные полюса статора. Эта небольшая разница, проскальзывание, необходима для поддержания тока в обмотках ротора и, таким образом, для сохранения магнитного поля ротора.Частота скольжения может составлять всего 1 Гц или даже меньше в большой машине, поэтому, если в 2-полюсном асинхронном двигателе с питанием от 50 Гц полюса статора вращаются со скоростью 3000 об / мин, ротор будет вращаться со скоростью 2940 об / мин. Когда вы его ускоряете, он действует как генератор. При 3060 / мин, скажем, при том же скольжении с обратным знаком выходной ток будет таким же, как и входной ток при 2940 / мин.
Вместе с двигателями постоянного тока, включая последовательно соединенные коллекторные двигатели, которые могут работать как от переменного, так и от постоянного тока, асинхронный трехфазный двигатель запускается самостоятельно при подаче сетевого напряжения.Более того: это будет происходить очень резко, с многократным превышением номинального крутящего момента и потребляемого тока, как описано выше. Это следующее отличие двигателя внутреннего сгорания, для запуска которого требуется небольшой двигатель постоянного тока.
Синхронная машина как таковая не может запуститься одна. По этой и другим причинам он обычно используется только как генератор.
Кроме того, последовательная коммутаторная машина в принципе является машиной постоянного тока, но поскольку ее статор и ротор соединены последовательно, они меняют полярность при изменении тока, поэтому направление вращения остается прежним.Следовательно, он также может работать как двигатель переменного тока, но при использовании в качестве генератора он будет генерировать постоянный ток, полярность которого зависит от некоторого случайного остаточного магнетизма, если он не определен специальной дополнительной катушкой.
Теперь, хотя управление мощностью и скоростью двигателя внутреннего сгорания совсем несложно, просто дросселируя подачу топлива, что, с другой стороны, является ужасной необходимостью, в то время как электродвигатель более или менее регулирует себя, «водопроводный кран» для электричества было окончательно изобретено в семидесятых: теперь доступны инверторы, которые преобразуют переменный ток в постоянный, а постоянный ток снова в переменный с электронными компонентами (и очень низкими дополнительными потерями) .Выход переменного тока можно регулировать как по амплитуде, так и по частоте, чтобы адаптировать его к требованиям любого двигателя в любой желаемой точке работы. Скорость и крутящий момент теперь можно контролировать независимо друг от друга. Таким образом, инвертор преодолевает практически все недостатки электродвигателя по сравнению с любым двигателем внутреннего сгорания, в то время как преимущества остаются такими же выдающимися, как и есть, включая обратную связь по мощности (инверсия потока энергии), если используется 4-квадрантный инвертор (2 направления вращения, 2 направления вращения). направления потоков энергии).
В очень простых терминах такие инверторы создают соединение между постоянным напряжением в звене постоянного тока, когда мгновенное переменное напряжение в линии выше, чем напряжение постоянного тока в звене, что позволяет потреблять энергию, и отключает оба от каждого из них. другое, когда напряжение «снаружи» ниже. Это принцип работы двигателя. Для возврата энергии в генераторном режиме инвертор, оправдывая свое название, делает обратное: подключается, когда напряжение в сети низкое, и отключается, когда оно высокое.Таким образом, энергия может идти в любом направлении, даже если линейное напряжение постоянно, а постоянное напряжение в промежуточной цепи также может поддерживаться на постоянном уровне, в зависимости от конструкции.
Другой конец, сторона двигателя силового электронного инвертора, несколько сложнее. Еще раз упрощая, принцип состоит в том, чтобы включать и выключать двигатель очень быстро, намного быстрее, чем это может сделать любой механический переключатель. Путем изменения отношения времени включения / выключения средний ток двигателя может непрерывно изменяться, даже если напряжение постоянного тока в промежуточной цепи поддерживается на постоянной амплитуде.Этот принцип намного сложнее и намного дороже, чем управление потоком воды в ванне с помощью водопроводного крана, но преимущества настолько очевидны, что этот принцип неуклонно распространяется во всем мире электрических приводов.
Инверторы также могут использоваться в сетях постоянного тока .
В то время как старые трамваи — а многие из них все еще существуют — вполне могли использовать свои двигатели для торможения, электроэнергия не могла подаваться обратно в линии, потому что напряжение, генерируемое двигателем, было, грубо говоря, немного ниже, чем напряжение. на линии, поэтому инверсия потока мощности была невозможна.Электроэнергия, генерируемая при торможении, поглощалась резисторами и терялась в виде тепла. В настоящее время инверторы могут прерывать постоянный ток в переменный, переменный ток можно преобразовать (чем меньше трансформатор, тем выше выбирается частота прерывания), выпрямить обратно в постоянный ток и подать обратно в воздушную линию.
Теперь двигатель внутреннего сгорания имеет определенную номинальную выходную мощность, и все. Если вы попытаетесь получить немного больше крутящего момента, чем указано на паспортной табличке, вы просто заглушите двигатель.
Какая разница в поведении электродвигателя! Он также имеет определенную максимальную мощность и максимальный крутящий момент, но что он делает, если вы хотите большего? Это дает вам больше!
Скорость двигателя постоянного тока или асинхронного двигателя немного падает, в то время как в синхронном двигателе угол между приложенным и индуцированным напряжением становится немного больше. Оба приводят к более высокому потребляемому току, что способствует более высокому выходному крутящему моменту при примерно или точно такой же скорости, соответственно.Если вы захотите, двигатель предложит вам удвоенный номинальный крутящий момент. В зависимости от конструкции и размера двигателя он может быть более чем в 5 раз выше номинального. Единственная проблема заключается в том, что это позволяет это делать только в течение ограниченного времени, потому что чрезмерный ток генерирует избыточное тепло в двигателе, и в конечном итоге двигатель перегорит. Специальные защитные выключатели двигателя, которые регулируются в соответствии с номинальным током, прерывают ток двигателя, если номинальный ток превышается слишком долго. Лучше всего контролировать фактическую температуру двигателя.Или использовать инвертор. Его электронное управление предлагает неограниченные возможности программирования.
Итак, начнем:
- Поскольку электродвигатель запускается самостоятельно, а многие типы даже предлагают максимальный крутящий момент (тормозной момент) в режиме покоя, в электромобиле не требуется сцепление.
- Поскольку электродвигатель обеспечивает гораздо больший крутящий момент в течение ограниченного времени, чем при непрерывной работе, в электромобиле не требуется переключение передач, поскольку транспортным средствам всегда требуется максимальная сила тяги только в течение ограниченных периодов разгона и движения в гору.
Таким образом, электродвигатель — гораздо лучший и более экологичный вариант для эксплуатации транспортного средства, чем двигатели внутреннего сгорания любого типа. Вместе с силовым электронным инвертором они близки к идеалу, в то время как привод внутреннего сгорания — это более или менее импровизированный способ передвижения транспортного средства, который только благодаря более чем 100-летнему опыту вместе с огромным и мощным рынком можно было оптимизировать путем: большое состояние, которое мы наблюдаем сегодня. Дальнейшего прогресса не видно.
Все, чего сейчас не хватает, так это годной батареи.Когда дело дойдет до всего наземного транспорта, сразу перейдут на электроприводы. Везде, где есть контактный провод, электропривод уже демонстрирует свое превосходство, и еще есть потенциал.
Мораль: двигатель внутреннего сгорания и электропривод не могут быть менее похожими. Если вы хотите разобраться в электрических приводах, первое, что вам нужно сделать, это забыть все о двигателе вашего автомобиля.
Асинхронный двигатель— обзор
Частотно-регулируемые приводы
Асинхронные и синхронные двигатели рассчитаны на определенное соотношение напряжения к частоте ( В, / Гц).Напряжение — это напряжение питания двигателя, а частота — это частота питания. Отношение В, / Гц прямо пропорционально величине магнитного потока в магнитном материале двигателя (пластинах сердечника статора и ротора). Крутящий момент, развиваемый на валу двигателя, пропорционален силе вращающегося потока. Тип и количество магнитного материала, используемого в конструкции двигателя, являются факторами, определяющими номинальную мощность двигателя.
При постоянной частоте питающей сети более высокое напряжение вызывает более высокое отношение В, / Гц и более высокий магнитный поток.При постоянном напряжении питания более низкая частота питания приведет к более высокому соотношению В, / Гц и более высокому потоку. Более высокий магнитный поток увеличивает крутящий момент двигателя. Когда двигатель работает при напряжении В, / Гц выше номинального, возникает перенапряжение, которое может вызвать насыщение статора и магнитного сердечника ротора. Насыщение вызывает перегрев и может привести к отказу двигателя. Когда двигатель работает при напряжении В, / Гц ниже номинального, магнитный поток уменьшается. Уменьшение магнитного потока снижает крутящий момент и влияет на способность двигателя выдерживать нагрузку.
Когда двигатели питаются напрямую от электросети, частота питающей сети остается постоянной, а напряжение и ток изменяются во время запуска двигателя. Во время разгона двигателя до синхронной скорости (синхронные двигатели) или скорости, близкой к синхронной (асинхронные двигатели), ток сначала возрастет в несколько раз по сравнению с номинальным током и вызовет падение напряжения. Более низкое напряжение при постоянной частоте питания означает более низкое соотношение В и / Гц и меньший магнитный поток, который влияет на крутящий момент.Как только двигатель ускоряется, напряжение восстанавливается до значения, близкого к номинальному, а крутящий момент на валу двигателя достигает номинального значения. В этом случае скорость двигателя будет постоянной и синхронной (синхронные двигатели) или близкой к синхронной (асинхронные двигатели). Если двигатели подключены напрямую к электросети, скорость определяется фиксированной частотой сети и не может контролироваться. Для управления скоростью при необходимости используются дополнительные механические системы: демпферы, клапаны, коробки передач, тормоза и т. Д.Механические системы снижают общую эффективность системы. Кроме того, как объяснялось ранее, асинхронные двигатели потребляют реактивную мощность, поэтому поддержание коэффициента мощности может быть проблемой для асинхронных двигателей. Синхронные двигатели не вызывают проблем с коэффициентом мощности, они действительно могут помочь.
Существует четыре категории проблем с двигателями, подключенными непосредственно к сети электропитания: высокий пусковой ток, контроль крутящего момента, контроль скорости и коэффициент мощности (только для асинхронных двигателей).Одним из эффективных способов решения проблем является использование частотно-регулируемых приводов. При использовании частотно-регулируемых приводов питание привода осуществляется от сети, а питание двигателя — от привода.
ЧРПуправляют скоростью и крутящим моментом двигателя, управляя частотой и величиной напряжений и токов, подаваемых на двигатель. Каждый частотно-регулируемый привод имеет три секции: выпрямитель, фильтр с накопителем энергии и инвертор. Типичная концептуальная конфигурация показана на рис. 7.22.
Рис. 7.22. Типичная конфигурация ЧРП.
Выпрямитель берет синусоиду фиксированной частоты и величины напряжения из сети и выпрямляет ее в форму сигнала постоянного тока.
Фильтр принимает форму сигнала постоянного тока от выпрямителя и обеспечивает почти чистый линейный постоянный ток. Накопитель энергии используется для поддержания мгновенного энергетического баланса. Если при сбалансированной трехфазной нагрузке общая мощность остается постоянной от момента к моменту, а с идеальным преобразователем, накопление энергии не потребуется. На практике преобразователям требуется накопитель энергии для хранения энергии, достаточной для питания двигателя в течение коротких интервалов, когда мощность нагрузки превышает входную мощность.Конденсаторы и индукторы используются для хранения энергии.
Инвертор преобразует мощность постоянного тока обратно в переменный ток через набор электронных переключателей (MOSFET (металлооксидный полупроводниковый полевой транзистор), IGBT (биполярный транзистор с изолированным затвором), IGCT (встроенный тиристор с коммутацией затвора), GTO (затвор) отключающий тиристор) и др.). Эти переключатели, открывая и закрываясь с определенной скоростью и продолжительностью, могут инвертировать постоянный ток и воссоздавать выходные токи и формы сигналов напряжения, которые имитируют синусоидальные формы сигналов переменного тока.Затем двигатель получает питание от выхода инвертора.
Формы выходных сигналов представляют собой сигналы с широтно-импульсной модуляцией (ШИМ). Они называются сигналами ШИМ, потому что они создаются несколькими импульсами переключателей с короткими интервалами. Величину и частоту сигналов напряжения ШИМ можно регулировать. Изменяя время, импульсы и какие переключатели срабатывают, частота может быть увеличена или уменьшена. Изменяя ширину и длительность импульсов, можно увеличивать и уменьшать среднее напряжение на двигателе.Типичная форма сигнала ШИМ с аппроксимируемой синусоидой показана на рис. 7.23.
Рис. 7.23. Типичная форма сигнала ШИМ с аппроксимируемой синусоидой.
При использовании в качестве примера асинхронного двигателя асинхронный двигатель может эффективно работать только при скорости, близкой к синхронной скорости вращающегося поля. Управление скоростью требует непрерывного изменения скорости вращающегося поля, что требует изменения частоты.
Когда выходное напряжение инвертора на каждой выходной частоте инвертора регулируется таким образом, чтобы соотношение В, / Гц поддерживалось постоянным до номинальной скорости, можно получить семейство кривых крутящего момента-скорости, аналогичных рис.7.24.
Рис. 7.24. VFD Поставляемая кривая крутящего момента асинхронного двигателя с изменением частоты и напряжения и постоянным соотношением В, / Гц.
Точка «a» на рис. 7.24 соответствует крутящему моменту без нагрузки и скорости без нагрузки при частоте питания инвертора 25 Гц. От без нагрузки в точке «a» до полной нагрузки в точке «b» скорость немного снизится. Если требуется поддерживать постоянную скорость из точки «а», регулятор частотно-регулируемого привода повысит частоту, так что рабочая точка при полной нагрузке переместится в точку «с».«Регулировка частотно-регулируемого привода также будет повышать напряжение пропорционально увеличению частоты, чтобы поддерживать постоянное соотношение В, / Гц при полной нагрузке и, таким образом, поддерживать крутящий момент при полной нагрузке.
Из рис. 7.24 видно, что момент отрыва постоянен во всех точках ниже номинальной скорости, за исключением низких частот. На низких частотах тяговый момент уменьшается из-за влияния сопротивления статора. Когда частота приближается к нулю, падение напряжения из-за сопротивления статора становится важным, и уменьшение магнитного потока, вызывающее уменьшение крутящего момента, становится заметным.Этот эффект известен и легко смягчается с помощью низкоскоростного повышения напряжения: увеличения отношения В, / f на низких частотах для восстановления магнитного потока. На рис. 7.25 показан типичный набор кривых крутящий момент-скорость для привода с повышением напряжения на низкой скорости.
Рис. 7.25. График зависимости крутящего момента от частоты вращения асинхронного двигателя с частотно-регулируемым приводом с изменением напряжения и частоты, постоянное соотношение В, / Гц до номинальной скорости и повышение напряжения на низкой скорости.
При превышении номинальной скорости соотношение В, / Гц больше не может поддерживаться постоянным, поскольку напряжение не может превышать номинальное напряжение двигателя во избежание пробоя изоляции двигателя.Увеличение частоты сверх номинальной частоты возможно и приведет к более высокой скорости, но при поддержании напряжения на уровне номинального напряжения и, следовательно, уменьшении отношения В и / Гц, плотность магнитного потока и крутящий момент уменьшатся.
Преимущество двигателей, поставляемых с частотно-регулируемым приводом, заключается в том, что двигатель может обеспечивать одинаковый максимальный крутящий момент от нулевой до номинальной скорости. Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянного крутящего момента». Непрерывная работа с максимальным крутящим моментом на практике не выполняется из-за тепловых ограничений.Верхний предел крутящего момента, равный номинальному крутящему моменту двигателя, обычно устанавливается в контроллере.
С двигателями, поставляемыми с частотно-регулируемым приводом, и их наличием высокого крутящего момента на низких скоростях можно избежать проблем пуска, общих для операций с фиксированной частотой (начальное высокое скольжение, высокий пусковой ток, падение напряжения и уменьшение крутящего момента). Двигатель с ЧРП запускается с низкой частоты, которая постепенно увеличивается. Скорость скольжения ротора всегда мала, и ротор непрерывно работает с оптимальным крутящим моментом.Номинальный крутящий момент доступен на низких скоростях, а пусковой ток не превышает номинального тока полной нагрузки. Двигатель может запускаться от недельной сети электроснабжения, не вызывая нарушений напряжения в питающей сети.
Как упоминалось ранее, двигатель с частотно-регулируемым приводом может развивать любой крутящий момент до номинального крутящего момента на любой скорости вплоть до номинальной. Эта область называется областью «постоянного крутящего момента». При превышении номинальной скорости В, / Гц будет снижаться, поскольку напряжение остается постоянным при номинальном напряжении двигателя, ток статора и ротора также остается постоянным, а скорость и частота увеличиваются, поэтому плотность магнитного потока будет уменьшаться, а крутящий момент будет уменьшаться обратно пропорционально Частота.Эта область характеристики крутящий момент-скорость двигателя называется областью «постоянной мощности». Область постоянной мощности примерно в два раза превышает номинальную скорость. За пределами области постоянной мощности находится область высоких скоростей, где предел тока совпадает с пределом крутящего момента отрыва, который уменьшается обратно пропорционально квадрату частоты, поэтому постоянная мощность не может поддерживаться дальше. Области постоянного крутящего момента, постоянной мощности и высокой скорости показаны на рис. 7.26.
Рис. 7.26. ЧРП предоставил кривую крутящего момента-скорости асинхронного двигателя в области постоянного крутящего момента, постоянной мощности и высокой скорости.
В двигателях с ЧРП важно отметить, что кривые крутящий момент-скорость показывают крутящий момент, который двигатель может создать для каждой частоты, но не то, как долго и может ли двигатель работать в каждом состоянии непрерывно. Если в приложении с двигателем, поставляемым с частотно-регулируемым приводом, используется стандартный асинхронный двигатель, необходимо учитывать ограничения по нагреву. Стандартный промышленный двигатель обычно заключен в корпус с установленным на внешнем валу вентилятором, который обдувает воздухом внешний корпус с оребрениями. Стандартная конструкция и охлаждение двигателя предназначены для непрерывной работы при фиксированной частоте и номинальной скорости, подаваемой в сеть.Когда стандартный промышленный двигатель работает, подключенный к ЧРП, который производит низкую частоту и запускает двигатель на низкой скорости, охлаждение двигателя становится проблемой. Двигатель будет способен создавать номинальный крутящий момент на низкой скорости, но в этих условиях он будет работать при более высоких температурах, что может существенно повлиять на срок службы двигателя или вызвать перегрев и отказ двигателя.
Когда двигатель используется в приложениях с частотно-регулируемым приводом, важно указать сценарии работы, соответствующим образом спроектировать охлаждение и использовать двигатели, подходящие для работы с инвертором.
Помимо охлаждения, при использовании двигателей с частотно-регулируемым приводом при проектировании необходимо учитывать и другие факторы, такие как влияние гармоник от частотно-регулируемого привода к сети, конфигурация кабеля и размер кабеля от частотно-регулируемого привода к двигателю и т. Д.
Номинальная частота — обзор
2.18.2.3.1 Активное регулирование мощности и частоты
Номинальная частота, используемая в странах Европы и Африки, составляет 50 Гц. Эта частота также используется подавляющим большинством стран Ближнего Востока, Азии, Австралии и островов Тихого океана.Однако в США, Канаде и большинстве стран Центральной и Южной Америки используется частота 60 Гц.
Частота электрической системы тесно связана с равновесием, которое существует между мощностью, подаваемой системой генерации, мощностью, потребляемой нагрузкой, и потерями мощности. Когда происходит отклонение в этом балансе мощностей, система управления восстанавливает его в соответствии с иерархической процедурой, разделенной на три этапа: первичный, вторичный и третичный контроль [52, 65, 70].Каждый из этих уровней работает с разным интервалом времени и включает области большей или меньшей величины всей электрической системы.
Если потребность в мощности резко возрастает или возникает неисправность генератора, первичный каскад управления должен быть немедленно доступен для обеспечения генерирующей мощности, необходимой для восстановления баланса мощности системы. Эта дополнительная генерирующая мощность первоначально обеспечивается за счет использования кинетической энергии, накопленной во вращающихся элементах энергоблоков, которые могут обеспечивать полную выходную мощность в течение нескольких секунд, а затем за счет вмешательства регуляторов скорости вращения турбины и двигателя. .
Кинетическая энергия зависит от инерции вращающихся масс и скорости вращения. Скорость вращения синхронных генераторов электрической системы пропорциональна частоте напряжения. Итак, отклонение от баланса активной мощности приводит к изменению частоты вращения генераторов и, как следствие, частоты системы.
После некоторой задержки, когда система реагирует на высвобождение накопленной кинетической энергии, может быть подано более значительное количество энергии для восстановления баланса активной мощности.Эта дополнительная энергия достигается за счет вмешательства систем, которые регулируют открытие клапанов, которые регулируют подачу топлива в двигатель, поток воды в турбинах гидроэлектростанции или поток газа или пара в турбинах тепловых электростанций ( Рисунок 22 ) . Поскольку двигатели и турбины механически связаны с генераторами, можно регулировать мощность, вырабатываемую последними, путем регулирования механической выходной мощности первых. Когда опорный уровень мощности не достигается или превышается, регуляторы турбины и двигателя регулируют клапаны для увеличения или уменьшения механической мощности.Следует отметить, что некоторые нагрузки чувствительны к изменениям частоты и соответственно изменяют свою потребляемую мощность.
Рисунок 22. Принципиальная схема системы регулирования частоты синхронного генератора.
Участие генераторов в восстановлении баланса мощности зависит от их мощности-частотной характеристики. Эта характеристика отображает изменение частоты, когда мощность, вырабатываемая машиной, изменяется от нуля до номинального значения. Это соотношение можно аппроксимировать прямой линией, наклон которой отрицательного знака является постоянной регулятора.Эта константа определяет характеристику регулятора в условиях непрерывной работы (установившееся состояние) и называется спадом скорости генератора. Падение скорости выражается в герцах на мегаватт, и типичные значения находятся в диапазоне 4–6%. Точка, в которой прямая линия пересекает ось частоты, называется уставкой. Регулятор позволяет оператору системы регулировать уставку таким образом, чтобы выходная механическая мощность изменялась без изменения частоты.
На рисунке 23 показана характеристика частоты мощности, которая соответствует генератору с определенной постоянной регулирования, работающему при двух различных уставках.Однако основной регулятор не изменяет заданное значение; скорее, изменение механической мощности достигается изменением частоты.
Рисунок 23. Активная мощность-частотная характеристика генератора с двумя уставками (A и B). P A , мощность, подаваемая генератором с уставкой A; P B , мощность, подаваемая генератором с заданным значением B.
Когда несколько генераторов разной номинальной мощности работают параллельно с разными падениями скорости, вклад каждого из них будет зависеть от значения его падения скорости .Агрегат с более низким падением скорости будет способствовать первичному регулированию более высокого процента мощности по сравнению с его номинальной мощностью, в то время как генератор с более высоким падением скорости вносит более низкий процент мощности. На рис. 24 показано распределение нагрузки между двумя генераторами с разным падением скорости. Если несколько параллельно включенных блоков имеют одинаковое падение скорости, все они будут вносить вклад в основной регулятор пропорционально своей номинальной мощности.
Рис. 24. Принципиальная диаграмма распределения нагрузки между двумя генераторами, включенными параллельно, с разными падениями скорости.
Первичное управление, действующее на местном уровне, позволяет восстановить баланс между генерируемой мощностью плюс потери и потребляемой мощностью. Первичный регулятор должен завершить свое вмешательство в течение 15–30 секунд с момента возникновения дисбаланса. Это время будет зависеть от величины дисбаланса. Первичный контроль гарантирует, что частота никогда не выходит за допустимый диапазон. Однако этот контроль не может предотвратить отклонение частоты от номинальной или номинальной опорной частоты.Кроме того, распределение увеличения нагрузки между генераторами не должно поддерживать запланированные потоки мощности. В некоторых странах, например в Испании, первичный контроль — это обязательная и неоплачиваемая дополнительная услуга, которую должны предоставлять подключенные генераторы. В Испании первичное управление энергоблоками должно допускать снижение скорости, чтобы генераторы могли изменять свою нагрузку на 1,5% от их номинальной мощности [52].
Вторичный регулятор мощности и частоты действует на зональном уровне, где частота в каждой из соседних производственных зон одинакова.Этот уровень контроля позволяет исправлять дефекты первичного контроля, хотя он действует медленнее. Начало вторичного контрольного вмешательства не следует откладывать более чем на 30 с. За этот уровень вмешательства отвечает автоматическое управление генерацией (AGC), и его действия централизованы.
Как уже упоминалось, можно изменять опорную мощность генераторов. То есть можно изменить уставку в частотно-линейных характеристиках.Это действие влечет за собой вертикальное перемещение частотно-частотной характеристики, как показано на Рис. 23 .
Посредством определения опорной мощности, которая должна быть произведена каждым генератором, который вмешивается во вторичное управление, ошибка частоты может быть исправлена стабильным образом, тем самым способствуя поддержанию частоты в этой конкретной зоне или области. В дополнение к покрытию потребности области, вторичный контроль, который выполняется системным оператором, должен поддерживать запланированные обмены энергией.Стратегия управления определяет для каждой области сигнал ошибки, известный как ошибка управления областью (ACE). Эталонное изменение мощности, назначенное каждому из генераторов, участвующих во вторичном управлении, должно быть пропорционально интегралу ACE. То есть сигнал ошибки является входной переменной интегратора. Его цель состоит в том, чтобы изменение механической мощности генераторов изменялось таким образом, чтобы погрешность измерения площади стремилась к нулю в установившемся режиме. Коэффициенты усиления интегратора определяются критериями устойчивости управления.
При участии различных систем генерации в регулировании частоты и управлении изменением спроса можно использовать несколько стратегий, основанных на скорости отклика, неразличении типа генератора и так далее. Время срабатывания вторичного контрольного резерва обычно ограничено и обычно не должно превышать 15 минут.
Резервная мощность, которая должна поддерживаться для вторичного управления, определяется оператором системы. В системе электроснабжения материковой Испании за точку отсчета обычно берется рекомендация UCTE.В Испании услуги вторичного контроля не являются обязательными и оплачиваются через рыночные системы [52].
Третичное управление работает в более широком диапазоне электрической системы, одновременно регулируя частоту и напряжение в соответствии с экономическими критериями и критериями безопасности [33]. Целью третичного управления является восстановление резерва вторичного управления, чтобы снова сделать его доступным. В общем, третичное управление работает с генераторами, которые могут или не могут быть подключены, и должны действовать в течение промежутка времени от 10 до 15 минут, а его резервы должны поддерживаться в течение нескольких часов.
В некоторых странах третичный контроль является дополнительной услугой, которая не является обязательной и оплачивается через рыночные системы.
Какая у вас частота? | Groschopp
Нам часто задают вопрос: «Может ли двигатель, рассчитанный на 60 Гц, работать при 50 Гц (или наоборот)?» При работе двигателя с частотой, отличной от частоты, указанной на паспортной табличке, может возникнуть несколько проблем.
В нашем предыдущем блоге «Основы двигателя переменного тока» мы объяснили, что синхронная скорость двигателя переменного тока определяется двумя факторами: числом полюсов двигателя и частотой входной мощности двигателя.Для данного двигателя количество полюсов не может быть изменено, потому что оно определяется физической конструкцией двигателя. Частота потребляемой мощности чаще всего определяется системой распределения электроэнергии в стране, в которой используется двигатель. Наиболее распространенные частоты — 50 Гц и 60 Гц.
Уменьшение частоты двигателя переменного тока снижает его скорость. В двигателях переменного тока с вентиляторным охлаждением более низкая скорость может означать, что вентилятор также не охлаждает двигатель. Это может означать, что длительный номинальный рабочий крутящий момент двигателя также уменьшится.Более медленный двигатель также означает, что его номинальная мощность снизится.
Еще один важный параметр, который изменяется при изменении частоты, — это отношение вольт к герцам. Двигатели переменного тока предназначены для работы с определенным соотношением В / Гц. В двигателе переменного тока сопротивление изменяется при изменении частоты. Если напряжение остается постоянным, а сопротивление уменьшается, тогда ток будет увеличиваться. Повышенный ток может обеспечить больший крутящий момент, но это также вызовет большие резистивные потери в двигателе, что может привести к его перегреву.Точно так же, если напряжение остается постоянным, а сопротивление увеличивается, тогда ток будет уменьшаться. Пониженный ток означает, что двигатель будет иметь меньший крутящий момент. Чтобы избежать обеих этих ситуаций, следует поддерживать постоянное соотношение В / Гц. Это принцип работы многих частотно-регулируемых приводов. Поддерживая постоянное соотношение В / Гц, ток, потребляемый двигателем, остается неизменным, и двигатель может поддерживать крутящий момент при различных скоростях. Это также означает, что двигатель, рассчитанный на 240 В переменного тока, 60 Гц (В / Гц = 240/60 = 4), может работать при 200 В переменного тока, 50 Гц (В / Гц = 200/50 = 4).
По возможности следует выбирать двигатель, который рассчитан на частоту мощности страны, в которой двигатель будет работать. Если двигатель должен работать при 50 Гц и 60 Гц, многие производители, включая Groschopp, делают двигатели, которые рассчитаны на обеих частотах. Кроме того, как мы видели выше, хотя в определенных ситуациях можно запустить двигатель на более высокой или более низкой частоте, чем та, на которую он рассчитан, это не всегда практично из-за изменений крутящего момента, потребляемого тока и потерь в двигателе.
Стандарты и нормы | TOPMOTORS
Правила ЕС
В ЕС действуют следующие директивы по экодизайну (директивы по созданию основы для установления требований к экологически безопасному проектированию энергетической продукции) для двигателей, частотно-регулируемых приводов (ЧРП), насосов и вентиляторов:
Экодизайн электродвигателей и частотно-регулируемых приводов
25 октября 2019 года Европейский Союз объявил о повышении минимальных требований к энергоэффективности для электродвигателей и частотно-регулируемых приводов (ЧРП).Требования нового Регламента (ЕС) № 1781/2019 применяются с 1 июля 2021 года, одновременно отменяя Регламент (ЕС) № 640/2009.
Постановление (ЕС) № 640/2009, отмененное с 1 июля 2021 г.
Двигатели мощностью 7,5 кВт или более должны соответствовать высшему классу эффективности IE3 с 1 января 2015 года, а все двигатели мощностью от 0,75 кВт до 375 с 2017 года действуют те же требования к кВт. Однако двигатели с классом эффективности IE2 все еще могут продаваться, если они работают вместе с частотно-регулируемым приводом.ЧРП позволяет регулировать скорость двигателя в зависимости от нагрузки, чтобы всегда обеспечивать оптимальную эффективность. Это означает, что потребление энергии может быть значительно снижено, если двигатель работает с разными скоростями и нагрузками. Это было изменено, см. Текущую консолидированную версию:
Регламент (ЕС) № 640/2009 (версия от 23.07.2009): Скачать
Регламент (ЕС) № 640/2009 (сводный текст , версия от 09.01.2017): Скачать
Регламент (ЕС) 2019/1781 и Регламент (ЕС) 2021/341
Стандартизированные правила для двигателей и частотно-регулируемых приводов будут применяться с 1 июля 2021 года как в Швейцарии, так и в Европейском союзе, поскольку положения Регламента (ЕС) 2019/1781 имеют был включен в Постановление Швейцарии об энергоэффективности (EnEV).
(ЕС) 2021/341 от 23 февраля 2021 г. вносит поправки в положения Регламента (ЕС) 2019/1781 для электродвигателей и частотно-регулируемых приводов. Как и в случае с более строгими минимальными требованиями к эффективности, изменения вступят в силу с 1 июля 2021 года. Уточнения включают:
- Минимальный КПД для двигателей 60 Гц: см. Регламент (ЕС) 2021/341, Приложение II (1) (a)
- предоставление информации о продукте с помощью QR-кода: см. Регламент (ЕС) 2021/341, Приложение II (1) (b)
- исключение для двигателей, размещенных на рынке в качестве заменителей идентичных двигателей, интегрированных в продукты, размещенные на рынке до изменения требований к энергоэффективности: см. Регламент (ЕС) 2021/341, Статья 2 (1)
Ключевые требования к энергоэффективности описаны выше в разделе, посвященном Швейцарии и классам эффективности.
Регламент (ЕС) 2019/1781 (версия от 25.10.2019): Скачать
Регламент (ЕС) 2021/341 (версия от 26.02.2021): Скачать
Экодизайн циркуляционных насосов
С 1 августа 2015 года для автономных циркуляционных насосов с мокрым ротором и циркуляционных насосов с мокрым ротором, интегрированных в изделия с гидравлической мощностью от 1 до 2500 Вт, требуется индекс энергоэффективности (EEI) 0,23. были изменены, см. текущую консолидированную версию:
Регламент (ЕС) No.641/2009 (версия от 23.07.2009): Скачать
Регламент (ЕС) № 641/2009 (сводный текст, версия от 14.11.2019): Скачать
Экодизайн водяных насосов
С 1 января 2015 года водяные насосы должны соответствовать требуемой эффективности гидравлического насоса в оптимальной рабочей точке с минимальным индексом эффективности (MEI) 0,4. Это было изменено, см. Текущую консолидированную версию:
Регламент (ЕС) No.547/2012 (версия от 26.